Modeling and Simulation
Vol.
12
No.
02
(
2023
), Article ID:
62502
,
13
pages
10.12677/MOS.2023.122096
基于柔性仿生关节的康复外骨骼机械手设计及运动性能分析
孔博磊1,2,3,孟巧玲1,2,3*,项世传1,2,3,喻洪流1,2,3
1上海理工大学康复工程与技术研究所,上海
2上海康复器械工程技术研究中心,上海
3民政部神经功能信息与康复工程重点实验室,上海
收稿日期:2023年1月27日;录用日期:2023年3月8日;发布日期:2023年3月15日

摘要
为解决传统康复外骨骼机械手的手指关节旋转中心不一致的缺点,设计了一种基于柔性仿生关节的康复外骨骼机械手。基于欧拉伯努利梁理论及伪刚体模型,使用有限元仿真分析研究外凸圆弧形柔性铰链的刚度特性方程,提出柔性仿生关节的设计方法。对手部外骨骼进行结构设计并进行样机制作,通过实验验证其运动性能。该外骨骼机械手手指最大弯曲角度可达115°,在该角度下的指尖力可基本保持在2.7 N左右。实验结果表明,该外骨骼可以实现手指关节活动度被动训练,并可辅助抓握物品。本研究利用了柔性仿生关节解决了传统外骨骼机械手关节旋转中心不一致的问题,可用于手功能障碍患者的康复训练和日常生活辅助。
关键词
康复外骨骼,康复训练,柔性铰链,机械结构设计

Design and Motion Performance Analysis of Rehabilitation Exoskeleton Manipulator Based on Flexible Bionic Joint
Bolei Kong1,2,3, Qiaoling Meng1,2,3*, Shichuan Xiang1,2,3, Hongliu Yu1,2,3
1Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology, Shanghai
2Shanghai Engineering Research Center of Assistive Devices, Shanghai
3Key Laboratory of Neurofunctional Information and Rehabilitation Engineering, Ministry of Civil Affairs, Shanghai
Received: Jan. 27th, 2023; accepted: Mar. 8th, 2023; published: Mar. 15th, 2023

ABSTRACT
In order to solve the problem of inconsistent rotation center of finger joint of traditional rehabilitation exoskeleton manipulator, a rehabilitation exoskeleton manipulator based on flexible bionic joint was designed. Based on the Euler Bernoulli beam theory and the pseudo-rigid body model, the stiffness characteristic equation of the convex arc flexible hinge is studied by finite element simulation, and the design method of the flexible bionic joint is proposed. The exoskeleton of the hand is designed and made into a prototype, and its motion performance is verified by experiments. The maximum bending angle of the exoskeleton manipulator finger can reach 115°, and the fingertip force at this angle can be basically maintained at about 2.7 N. The experimental results show that the exoskeleton can achieve passive training of finger joint mobility and assist in grasping objects. This study uses flexible bionic joints to solve the problem of inconsistent rotation center of traditional hand exoskeleton joints, which can be used for rehabilitation training and daily life assistance for patients with hand dysfunction.
Keywords:Rehabilitation Exoskeleton, Rehabilitation Training, Flexible Hinge, Mechanical Structure Design

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着人口老龄化和人们生活方式、饮食习惯的改变,脑卒中发病率逐年升高 [1] 。脑卒中患者会伴有不同程度的偏瘫后遗症以及中枢神经损伤,其中运动功能障碍是最为常见的后遗症。现代康复实践表明,有效的康复训练能够降低致残率,同时加速脑卒中患者的康复进程 [2] 。但是,超过60%的患者在康复后期仍然存在上肢功能障碍,特别是手功能障碍 [3] 。传统治疗方法需要康复医师进行一对一的康复护理,治疗成本较高且不适于家庭康复训练。外骨骼机械手可以很好的解决传统治疗方式的缺陷,帮助患者进行重复繁杂的康复训练,有效改善偏瘫患者的手部运动功能。对于手功能无法完全恢复的患者,外骨骼机械手也可进行日常生活辅助。
随着康复机器人技术与临床医学紧密结合,各种各样的外骨骼机械手被开发出来,其中主要包括刚性外骨骼机械手和柔性外骨骼机械手。刚性外骨骼机械手一般由多个连杆或者齿轮传动结构通过刚性铰链相互连接构成,其利用驱动器驱动刚性连杆从而带动手指运动 [4] [5] [6] 。这种结构可以实现对手指每个关节的控制,由于刚性铰链连接会出现旋转中心发生偏移的情况(如图2a所示),可采用连杆滑槽等结构来补偿手指关节旋转带来的额外位移。但此类外骨骼通常结构复杂,体积较大,且穿戴舒适性差 [7] 。而柔性外骨骼具有较强的适应性、较为轻便的结构,有效解决了旋转中心偏移的问题,更加适合执行日常生活活动与操作 [8] 。哈佛大学Polygerino等人利用软体机器人技术研制了一款软硅胶气动外骨骼手套。基于人手指的运动特性,利用气泵调节气腔的压力来重建手指所需的弯曲运动。但驱动元件较大较重,不利于随身携带 [9] 。美国哥伦比亚大学Park等人提出了一款辅助手指伸展的手部外骨骼。该外骨骼手将驱动原件以及执行器机构都放置于手背侧,提升了绳索力传递效率。但该外骨骼手只能提供单向伸展运动,无法满足肌无力患者的需求 [10] 。伊朗德黑兰大学Hadi等人设计了一款采用形状记忆合金肌腱驱动的外骨骼手,名为ASR glove。研究人员利用直径为0.25毫米的记忆合金丝,提供了超过40 N的总抓握力,满足日常生活辅助所需。但记忆合金丝响应速度较慢,且合金丝驱动会产生高温,对人手存在烫伤风险 [11] 。柔性铰链是一种利用柔性材料可逆的弹性形变来产生运动或传递能量的传动结构。一体化结构以及弹性形变的特性决定了柔性铰链无间隙、无噪声、无磨损、空间尺寸小及运动灵敏度高的特点 [12] 。因此柔性铰链被广泛应用到了有高运动精度需求及微小尺寸需求的场所。
因此,本文设计一种基于柔性仿生关节的康复外骨骼机械手,利用柔性铰链可逆的弹性形变与推杆电机相互结合来产生运动,解决旋转中心不一致的问题,同时实现手指的屈曲和伸展动作。帮助手功能障碍患者进行康复训练,并对患者进行日常生活辅助。通过有限元分析研究了外凸圆弧形柔性铰链刚度特性,并提出了柔性仿生关节设计方法。设计并制作样机,最后通过实验验证该外骨骼手康复训练及生活辅助的性能。
2. 柔性仿生关节设计
外凸圆弧形柔性铰链是一种梁型非轴对称截面的柔性铰链,如图1所示,其具有旋转中心偏移对称轴的特征。该特征可补偿外骨骼驱动手指关节运动产生的旋转中心不一致的特点(如图2b所示)。然而手指关节运动的非线性对该类型的柔性仿生关节设计带来了极大的困难。因此,本文基于欧拉伯努利梁理论、伪刚体模型(Pseudo Rigid Body Model, PRBM) [13] 和有限元方法建立了外凸圆弧形柔性铰链的刚度特性方程,并在此基础上提出了柔性仿生关节的设计方法。
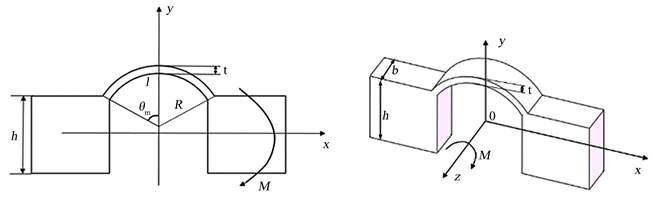
Figure 1. Convex arc flexure hinge model
图1. 外凸圆弧柔性铰链模型
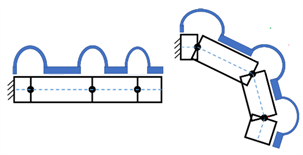
 a 刚性铰链 b 柔性铰链
a 刚性铰链 b 柔性铰链
Figure 2. Finger bending diagram of different types of hinge joint exoskeleton
图2. 不同种类铰链关节外骨骼手指弯曲示意图
2.1. 基于PRBM的刚性特性方程
外凸圆弧形柔性铰链(图1)的主要结构参数为:最小厚度t,宽度b,高度h,圆弧半径R,圆弧弧长l,圆弧的圆心角2θm以及惯性矩I。PRBM的刚度特性方程为:
(1)
2.2. 有限元仿真分析
PRBM的刚性特性方程(式1)可根据铰链的几何结构参数及材料特性计算出柔性铰链的刚度,但对于外凸圆弧柔性铰链刚度计算存在误差。因此通过对不同几何参数的外凸圆弧形柔性铰链进行有限元分析,对公式(1)进行修正以得到更准确的外凸圆弧形柔性铰链的刚度计算公式。
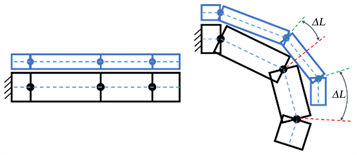
本文运用COMSOL对不同几何结构参数的外凸圆弧形铰链分别进行分析。外凸圆弧形柔性铰链模型的几何参数可根据不同的圆心角2θm和t/l值进行确定。本研究中圆心角2θm分别取0.1 rad,0.25 rad,0.5 rad,1.0 rad,1.5 rad,2.0 rad。t/l值分别取0.05,0.1,0.15,0.2,0.25,0.3,0.35,0.4,0.45,0.5。按照图1中外凸圆弧形柔性铰链结构,建立了60个模型。这些模型以不同的圆心角分为6组,其材料选用聚四氟乙烯(PTFE),其杨氏模量E = 400 MPa,泊松比μ = 0.3,屈服强度σ = 23 MPa,材料特性为各向同性。对该模型左端进行固定约束,在模型的右端面施加弯矩M使柔性铰链到达材料弹性变形范围内的最大变形角度θ。如图3,为圆心角2θm = 2.0 rad的10种不同t/l值的外凸圆弧柔性铰链的仿真结果。共有6组仿真结果,此处以2.0 rad圆心角为例。
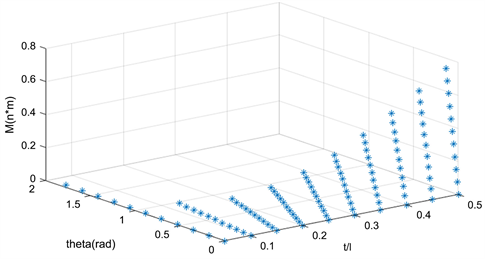
Figure 3. Finite element simulation results (center angle is 2.0 rad)
图3. 有限元仿真结果(圆心角为2.0 rad)
2.3. 柔性仿生关节设计方程
为得到刚度特性方程的修正系数v,并进一步获得外凸圆弧柔性铰链的刚度方程,使用MATLAB对6组仿真得到的数据进行处理。根据所施加的弯矩M,以及通过仿真得出的最大变形角度θ,得到柔性铰链仿真刚度KF = M/θ,修正系数v = KF/KH。通过MATLAB拟合工具箱进行方程拟合可得到:
(2)
仿真得到的刚度KF可认为是外凸圆弧形柔性铰链真实刚度KZ。所以,外凸圆弧形柔性铰链的刚度特性方程为:
(3)
其中,式(2)及式(3)中的系数 可通过表1获得。

Table 1. Coefficient ai
表1. 系数ai
同时,使用MATLAB方程拟合工具箱对仿真数据进行方程拟合,还可得:
(4)
(5)
其中,θ(t/i)表示不同t/l值对应的铰链产生的最大变形角度θ,σ/E表示铰链的材料特性。由式4可知t/l值越小柔性铰链的变形角度越大,式5则可用于验证材料是否满足需求。因此可以作为柔性仿生关节的设计方程。
3. 康复外骨骼机械手结构设计
基于柔性仿生关节的康复外骨骼机械手(图4),主要包括:柔性手指,拇掌指关节固定矫形器,手掌平台,线传动机构及电机平台。其中,拇掌指关节固定矫形器将手掌平台固定在患者手背部。柔性手指与手掌平台连接,电机平台固定在前臂处,通过传动机构向柔性手指输出弯曲力矩,实现手指关节的屈曲/伸展运动以及抓取物品功能。
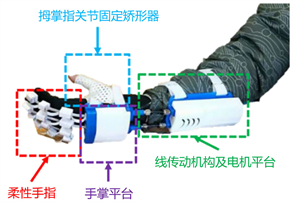
Figure 4. Hand rehabilitation exoskeleton
图4. 康复外骨骼机械手
3.1. 柔性手指结构设计
康复外骨骼机械手的柔性手指主要由3部分构成,分别为外凸圆弧柔性铰链关节,手指节和柔性推杆,整体结构如图5所示。其中,柔性铰链关节将各手指节依次连接,柔性推杆穿过所有手指节,通过指节上的通口处来回滑动以及自身的弯曲来传递电机端输出的力与位移,用于驱动外骨骼手指的屈曲/伸展。
除了一些众所周知的英文缩写,如IP、CPU、FDA,所有的英文缩写在文中第一次出现时都应该给出其全称。文章标题中尽量避免使用生僻的英文缩写。
3.1.1. 柔性仿生关节设计
根据外凸圆弧柔性铰链的刚度特性分析,设计柔性仿生关节,使其可以满足关节弯曲角度需求并补偿旋转中心偏移。如图6,每个柔性手指有3个关节,在选择各关节柔性铰链的刚度时,还要考虑纵向延展性。外凸圆弧形柔性铰链的圆心角越大,其纵向延展性越强 [14] 。因此选择大圆心角(2θm = 2.0)的外凸圆弧形柔性铰链进行关节设计。依据第1节拟合得到的柔性仿生关节设计方程(式4和式5)并参考人手的尺寸,对外骨骼柔性手指进行结构设计和材料选型。

Figure 5. Exoskeleton finger structure
图5. 外骨骼手指结构
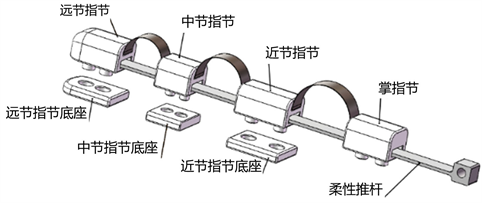
Figure 6. Exploded view of exoskeleton flexible finger structure
图6. 外骨骼柔性手指结构分解图
3.1.2. 手指指节及柔性推杆设计
根据人手指节的长度和宽度,以及铰链的大小,对手指指节的结构进行设计。如图6,指节与指节底座通过两个圆柱端过盈配合连接,这两个部件可进行自由拆卸与安装。指节底座通过胶粘的方式与用户佩戴的手套进行固定,便于穿戴与拆卸。
柔性推杆属于柔性铰链的一种,可根据PRBM的刚度特性方程(式1),人手指长度和弯曲伸长量进行结构设计。推杆电机通过传动机构输出力与位移到柔性推杆,柔性推杆伸长并带动柔性手指弯曲,进而带动穿戴者手指运动。因此推杆电机输出到手指的弯曲力矩为:
(6)
其中,柔性手指上的3个柔性仿生关节刚度分别为K1,K2,K3,柔性手指各关节所能达到的最大弯曲角度分别为θ1,θ2,θ3。根据Mi = Kiθi可以得出外骨骼柔性手指各关节产生的最大弯曲力矩分别为M1,M2,M3。柔性推杆的弯曲力矩为Mp = Kp (θ1 + θ2 + θ3),Kp = EI/l为柔性推杆产生的刚度,l为柔性推杆的长度。Mfi为患者手指各关节产生的弯曲力矩,可根据实际情况进行设定。
3.2. 拇掌指关节固定矫形器设计
拇掌指关节固定矫形器,如图7,主要用于拇指掌指关节制动,保持大拇指的功能位。其结构采用低温热塑板将拇指部位塑为“管”型,向下包绕整个大鱼际,顶端止于拇指指间关节。大鱼际部位下方止于腕关节,借助手掌部和背部材料分别向尺侧延伸,止于小鱼际处。
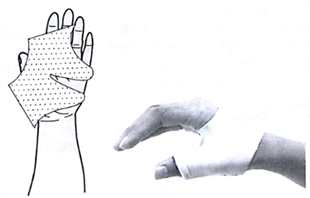
Figure 7. Fixed orthosis of thumb metacarpophalangeal joint
图7. 拇掌指关节固定矫形器
3.3. 手掌平台设s计
手掌平台是连接外骨骼机械手与用户手部的媒介,同时也是手指驱动机构的固定基座。如图8,手掌平台上主要有柔性外骨骼手指,外骨骼手指固定件,耦合驱动件以及拉压力传感器。其中柔性手指中的小指、无名指以及中指通过手掌平台部分的耦合件由同一个直线推杆电机进行同步驱动,食指则由另一个直线电机单独驱动。两个拉压力传感器,用于探测运动过程中的状态变化。

Figure 8. Palm platform structure
图8. 手掌平台结构
3.4. 传动机构及电机平台设计
根据手掌平台与电机平台的距离,进行传动机构尺寸设计。如图9a所示,传动机构主要有鲍登线管,快速接头,固定接头以及螺柱组成。鲍登线管具有一定的柔性,可允许小角度范围的运动,解放了腕部约束,使患者腕部也能进行小角度的运动。
根据人前臂的尺寸进行电机平台设计。如图9b,电机平台上安装有手臂绑带和2个直线推杆电机。其中,手臂绑带将电机平台固定在手臂前端,推杆电机背电机固定件固定于平台上,电机输出端通过钢绳连接件连接钢索。当直线推杆电机工作时,传动机构将推力和位移传递到柔性推杆。在柔性手指、手套以及患者手指的共同约束下进行弯曲运动。
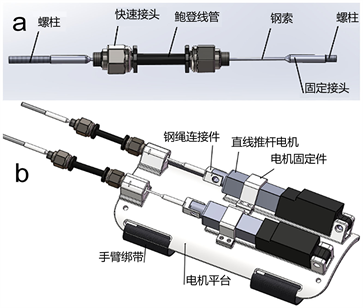 a 传动机构 b 电机平台
a 传动机构 b 电机平台
Figure 9. Design of transmission mechanism and motor platform
图9. 传动机构与电机平台设计
4. 样机制作与实验测试
4.1. 样机制作
根据第3节康复外骨骼机械手的结构设计,对外骨骼手的主要部件进行制作,如图10所示。
4.1.1. 柔性手指
根据GB/T10000-1988中国成年人人体尺寸中的手部尺寸,进行柔性手指各部分长度参数设计(见表2)。考虑到外骨骼手的穿戴舒适性,柔性铰链关节的宽度应要小于人体手指宽度。各手指设计方法相同,此处以食指为例,由于人食指宽度范围在13 mm至20 mm,柔性铰链宽度应小于13 mm。同时,在较小的尺寸变化范围内,铰链宽度b对柔性铰链的刚度影响较小,考虑到后续外骨骼手指节宽度的设计约束,将宽度b定为6 mm。
以食指的掌指关节为例,该关节直径为20 mm,在选择圆心角为2 rad的情况下,确定外凸圆弧柔性铰链的l约为23.77 mm,令厚度t = 0.15 mm,得t/l = 0.006。将t/l以及铰链所需形变角度θ带入设计方程(5)计算出σ/E的值为0.0031,因此选择65锰钢(该材料σ/E = 0.00392)作为柔性铰链的制作材料。
根据人手指节的长度和宽度,以及铰链的大小,对柔性手指指节的结构进行设计,其长度参照表4进行设计,其高度及宽度分别定为9 mm和12 mm。
 a 柔性手指 b 固定矫形器 c 传动机构 d 手掌平台 e 电机平台
a 柔性手指 b 固定矫形器 c 传动机构 d 手掌平台 e 电机平台
Figure 10. Prototype drawing of each part of exoskeleton manipulator
图10. 外骨骼机械手各部分样机图
Table 2. Length of fingers of exoskeleton manipulator (mm)
表2. 外骨骼机械手手指各部分长度(mm)
(MCP:掌指关节;PP:近节指骨;PIP:近端指间关节;MP:中节指骨;DIP:远端指间关节;DP:远节指骨)。
柔性推杆的宽度要受指节尺寸的约束,同时其长度和厚度关系到柔性推杆的力学性能。手指在关节屈曲过程中其伸指肌腱延长值范围为3 mm~16 mm,因此在设计柔性推杆长度时,预留20 mm的推进行程,使能够完成手指驱动且有余量。综合考虑这些因素,设计了宽6 mm,长130 mm以及厚度为1 mm柔性推杆,其材料为聚丙烯。最终得到如图10a所示的柔性手指。
4.1.2. 手掌平台
根据GB/T10000-1988中国成年人人体手掌尺寸,设计最优的手掌平台尺寸。如图11a,柔性机械手指安装侧长为80 mm,手腕侧长为67 mm,沿手掌长方向长为72 mm。手掌平台下侧是平滑弧面,对上侧面进行了平面的设计。
4.1.3. 传动机构及电机平台
传动机构采用外径4 mm、内径2 mm的刹车线管及线径1.5 mm的不锈钢研磨刹车内线。此外,通过实际测量以及传动机构对电机平台尺寸的需求,设计电机平台最优尺寸。如图11b所示,平台的长为140 mm,宽为70 mm,其内侧呈半圆弧形,圆弧半径为40 mm,圆弧圆心角为118˚。
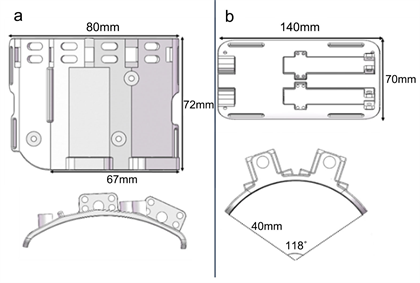
Figure 11. Parameter design of palm platform a and motor platform b
图11. 手掌平台a与电机平台b的参数设计
4.2. 实验测试
为验证基于柔性仿生关节的外骨骼手在解决关节旋转中心不一致的问题的基础上,可实现手指关节活动度训练及生活辅助功能,对外骨骼手进行了三种实验,分别为弯曲角度测量实验、指尖力测量实验以及抓取静物实验。
4.2.1. 弯曲角度实验
使用Arduino Flex弯曲传感器(如图12a)检测外骨骼手指的弯曲角度。实验过程中将弯曲传感器的A面紧贴柔性手指内侧平面处,直线推杆电机按5 mm的行程逐次叠加推进,测试系统输出机械手指弯曲角度以及反馈电机行程位置。
图12d为实验结果,外骨骼手指在初始阶段的弯曲角度约为23˚,这由患者手指及外骨骼结构的初始位置决定。在电机的推进过程中,手指的弯曲角度不断增大至115˚左右。在电机回退阶段,手指的弯曲角度不断下降并恢复至初始位置。实验结果表明,基于柔性铰链关节的外骨骼机械手不会出现关节旋转中心不一致的问题,可以实现手指的屈曲伸展运动,满足关节活动度训练需求。此外,电机推进过程中机械手弯曲角度与电机行程呈近似线性关系,即可通过直线电机推进行程的大小确定机械手指大致的弯曲角度,该实验也为控制执行器实现定角度弯曲提供了理论基础。
4.2.2. 指尖力测量实验
使用RX-D1016柔性薄膜压力传感器(图13a)检测指尖力。实验过程中将压力传感器固定安装在外骨骼手食指指尖内侧,用户佩戴外骨骼手抓取水杯,通过压力传感器测量指尖的压力值。实验主要分为3个阶段,分别为电机前推阶段,电机暂停阶段和电机回退阶段。
图13c为实验结果,初始状态指尖压力约为0,在电机前推阶段,指尖力不断上升;在暂停保持阶段,电机推进行程不变,指尖力基本保持在2.7 N左右;在电机回退阶段,指尖逐渐脱离被抓物体,指尖力下降至0。实验结果表明,利用柔性铰链可逆的弹性形变与推杆电机相互结合,可以为使用者提供较为稳定的抓握力。
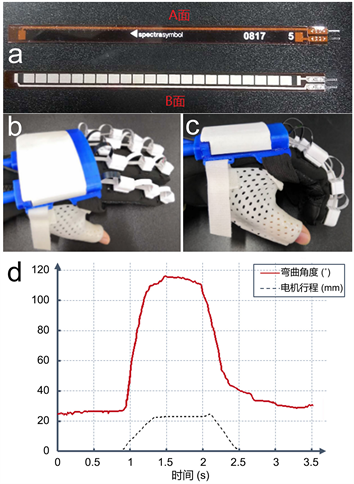 a 弯曲角度传感器 b 初始状态 c 最大弯曲状态 d 实验结果
a 弯曲角度传感器 b 初始状态 c 最大弯曲状态 d 实验结果
Figure 12. Bending angle measurement experiment
图12. 弯曲角度测量实验
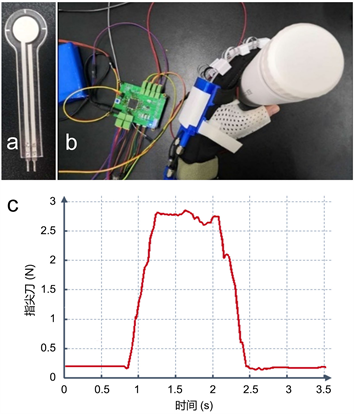 a 压力传感器 b 实验过程 c 实验结果
a 压力传感器 b 实验过程 c 实验结果
Figure 13. Fingertip force test experiment
图13. 指尖力测试实验
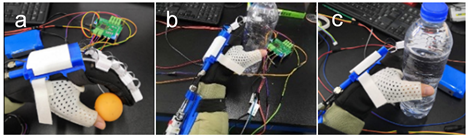 a 抓乒乓球 b 抓空瓶 c 抓满水瓶
a 抓乒乓球 b 抓空瓶 c 抓满水瓶
Figure 14. Grab still life experiment
图14. 抓取静物实验
4.2.3. 抓取静物实验
该外骨骼机械手需要满足患者日常生活抓握不同物体的需求。因此外骨骼机械手需具备弯曲角度可控和保持实时状态的功能。为验证其生活辅助的持续稳定性,使用外骨骼机械手进行不同物体的抓取实验。如图14所示,分别抓取乒乓球,空水瓶和满水瓶。结果表明该康复外骨骼手具有一定的抓握能力,且可较好的保持抓取状态,能够实现日常生活辅助功能。
5. 结论
针对传统刚性铰链外骨骼驱动手指关节运动产生的旋转中心不一致的问题,本文提出一种基于柔性仿生关节的康复外骨骼机械手。通过有限元分析建立了外凸圆弧形柔性铰链的刚度特性方程,并提出了柔性仿生关节的设计方法。此外对外骨骼手各部分进行机械结构设计并制作样机。通过实验测试了基于柔性仿生关节的外骨骼手的运动性能。实验结果表明,该康复外骨骼机械手解决了关节旋转中心不一致的问题,可满足手功能障碍患者的关节活动度康复训练和日常生活辅助需求。
文章引用
孔博磊,孟巧玲,项世传,喻洪流. 基于柔性仿生关节的康复外骨骼机械手设计及运动性能分析
Design and Motion Performance Analysis of Rehabilitation Exoskeleton Manipulator Based on Flexible Bionic Joint[J]. 建模与仿真, 2023, 12(02): 1018-1030. https://doi.org/10.12677/MOS.2023.122096
参考文献
- 1. 林佳丽, 贾杰. 脑卒中后感觉训练在上肢及手功能康复中的研究进展[J]. 中国康复医学杂志, 2020, 35(4): 488-492.
- 2. 姚安艳, 严璐. 脑卒中后运动功能障碍患者的康复训练研究进展[J]. 贵州中医药大学学报, 2022, 44(3): 91-95.
- 3. 黄锦文, 梁国辉. 手外科康复治疗技术[M]. 北京: 中国社会出版社, 2010.
- 4. 钟思灵, 于随然. 手部功能康复外骨骼的结构设计与分析[J]. 机械设计与研究, 2020, 36(3): 12-18.
- 5. 厉朝, 赵彦峻, 乔学昱, 刘文龙, 贾丙琪. 欠驱动康复外骨骼手的设计及试验[J]. 机械传动, 2019, 43(9): 154-158.
- 6. Chauhan, R.J. and Ben-Tzvi, P. (2019) A Series Elastic Ac-tuator Design and Control in a Linkage Based Hand Exoskeleton. Proceedings of ASME Dynamic Systems and Control Con-ference, Park City, Utah, USA, 8-11 October 2019. https://doi.org/10.1115/DSCC2019-8996
- 7. Prange, G.B., Smulders, L.C., Van Wijngaarden, J., et al. (2015) User Re-quirements for Assistance of the Supporting Hand in Bimanual Daily Activities via a Robotic Glove for Severely Affected Stroke Patients. Proceedings of 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11-14 August 2015, 357-361. https://doi.org/10.1109/ICORR.2015.7281225
- 8. Rus, D. and Tolley, M.T. (2015) Design, Fabrication and Control of Soft Robots. Nature, 521, 467-475. https://doi.org/10.1038/nature14543
- 9. Polygerinos, P., Lyne, S., Wang, Z., et al. (2013) Towards a Soft Pneumatic Glove for Hand Rehabilitation. Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3-7 November 2013, 1512-1517. https://doi.org/10.1109/IROS.2013.6696549
- 10. Park, S., Weber, L., Bishop, L., et al. (2018) Design and Development of Effective Transmission Mechanisms on a Tendon Driven Hand Orthosis for Stroke Patients. Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21-25 May 2018, 2281-2287. https://doi.org/10.1109/ICRA.2018.8461069
- 11. Hadi, A., Alipour, K., Kazeminasab, S., et al. (2017) ASR Glove: A Wearable Glove for Hand Assistance and Rehabilitation Using Shape Memory Alloy. Journal of Intelligent Material Systems and Structures, 29, 1575-1585. https://doi.org/10.1177/1045389X17742729
- 12. 陈应舒, 朱淳逸. 曲梁柔性铰链性能分析及应用机构设计[J]. 机械设计与制造, 2018(11): 183-185+189.
- 13. Howell, L.L. (2001) Compliant Mechanism. John Wiley & Sons Limited, New York.
- 14. 龙永成, 葛文杰, 张永红, 景藜. 外凸圆弧柔性铰链的计算与分析[J]. 机械设计, 2011, 28(1): 70-72.
NOTES
*通讯作者。