Open Journal of Transportation Technologies
Vol.
10
No.
01
(
2021
), Article ID:
40157
,
10
pages
10.12677/OJTT.2021.101007
基于信息熵的飞行冲突危险性评估
霍达1,丛玮2,3,谢道仪4
1中国民用航空局空中交通管理局,北京
2飞友科技有限公司,安徽 合肥
3大蓝洞(南京)科技有限公司,江苏 南京
4中国民用航空华东地区空中交通管理局江苏空管分局,江苏 南京

收稿日期:2020年12月8日;录用日期:2021年1月19日;发布日期:2021年1月29日

摘要
飞行冲突危险性评估是空中交通安全管理的重要组成部分,是提升空中交通系统运行安全性与效率的关键手段。以国内现有飞行冲突评估体系为基础,完善了对冲突航空器飞行诸元的描述,进一步将空域结构与运行环境纳入考量范围,重新构建动态化的飞行冲突评估体系。通过信息熵给体系中各指标赋权用以描述飞行冲突危险性的影响,并基于实际飞行冲突数据计算飞行冲突危险性时间序列,进而全面分析飞行冲突事件的危险性演化过程。
关键词
空中交通安全管理,飞行冲突危险性,信息熵,指标体系

Estimation of Risk of Air Traffic Confliction Based on Information Entropy
Da Huo1, Wei Cong2,3, Daoyi Xie4
1Air Traffic Management Bureau of China Civil Aviation Administration, Beijing
2VariFlight Technology Company Limited, Anhui Hefei
3Big Blue Hole (Nanjing) Technology Company Limited, Nanjing Jiangsu
4East China Air Traffic Management Bureau, Jiangsu Sub-Bureau, CAAC, Nanjing Jiangsu

Received: Dec. 8th, 2020; accepted: Jan. 19th, 2021; published: Jan. 29th, 2021

ABSTRACT
Air traffic confliction estimation is one of the important parts of air traffic safety management and is a key method to improve the safety and efficiency of air traffic system. Base on the current index of safety estimation system, we restructure a new dynamic index. In this new index, we improve description about flight data in confliction and take the construction of air apace and the environment of operation into consideration. We use information entropy to describe the influence of different indicators of the risk of air traffic confliction. Finally, we fully analyze the progress of air traffic confliction according to time series of true air traffic data.
Keywords:Air Traffic Safety Management, Risk of Air Traffic Confliction, Information Entropy, Index System

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,如何推动民航高质量发展是民航业共同面临的迫切要求和艰巨任务。安全作为民航高质量发展的重要前提,是四强空管的核心要素之一,依然是当下空管能力建设的重要组成部分。目前,我国空管运行中虽有管制自动化系统提供的冲突告警功能,但仅限于在实时运行阶段,无法对典型冲突场景提供事后分析支持。随着航空器飞行性能的不断提升,通讯、导航、监视设备性能的持续发展,以及空域结构的改变以及航班量的增长带来的运行环境变更,当初制定的冲突评估指标已经难以适应当下的安全管理工作,将不利于在保证安全阈值的情况下提升运行效率,更会对空中交通的安全性带来影响。故而,亟需重新审视冲突分析指标,结合当下的运行特征进行指标的完善工作,使之可以适应当下的冲突分析。
根据ICAO《附件19 安全管理》提出的安全管理体系框架的要求,各民航当局应建立安全绩效监测与衡量体系,以评估其辖区内航空安全情况[1]。空中交通冲突,包括危险接近和低于最小间隔的事件,按照事件严重程度,被列为事故征候和严重事故征候[2]。我国及欧美各国均已建立详细的量化体系,用以评估空中交通冲突的严重等级。评分标准适用范围方面,美国联邦航空局(FAA, Federal Aviation Administration)将评分体系分为航路空域和终端区空域,欧洲航空安全局(EASA, European Union Aviation Safety Agency)针对管制空域和非管制空域也提出了不同的标准,中国民用航空局(CAAC)根据不同高度层使用不同标准,而澳大利亚交通安全局(ATSB, Australian Transport Safety Bureau)则未按空域类别将评估标准分类。
航空器间隔、航空器接近率和可控性均被我国、欧盟、美国和澳大利亚航空安全部门列为评价空中交通冲突严重程度的指标;CAAC、FAA和ATSB也将航空器航迹列为考核指标;EASA引入数据可靠性权重,用于衡量模型中数据量是否足以支撑严重等级的评估。从可控性维度下的各因素可以看出,EASA将空中冲突细分为管制员、航空器驾驶员和自动化设备三个方面,而其他当局则更多强调管制员在该事件中的责任[3] [4] [5] [6]。除了官方给出的标准以外,学术界对于空中交通飞行安全管理做出了研究。从宏观上来说,相关研究集中在空中交通安全管理指标体系的构建以及评价。王昌顺立足于民航系统的角度采用谱分析法定量描述了民航行业的安全管理目标与对策[7]。徐佳璐结合我国实际情况提出构建空管安全管理体系的五个重要方面,并运用层次分析确定权重,分析安全管理重点[8]。贾贵娟针对空管风险因素进行了收集与分析总结,运用风险管理、安全行为学等构建空管安全风险评估指标体系,并使用神经网络、灰色系统等方法进行综合评价[9]。在微观角度,相关的研究则集中在航空器的碰撞风险上。徐肖豪等总结了基于碰撞风险的飞行间隔安全研究,分别从REICH、交叉航路、概率路、随机分析、EVENT、以及RASRAM六个模型的角度分析各自的优缺点以及使用范围[10]。潘卫军等构建了RECAR尾流间隔标准下的REICH碰撞风险模型,弥补了进近阶段碰撞风险评估的短板[11]。
本文在吸收上述研究成果的基础上,针对官方的飞行冲突评价体系进行研究与改进,旨在更加全面的评估飞行冲突的危险性。此外,由于在航空器发生冲突时便产生了极强的关联性,其中一架航空器飞行诸元的变化会对两架航空器之间的飞行安全产生连携效应,故而当航空器航行诸元数据分布在不同的区间范围内时,描述航行诸元的指标将对飞行冲突的危险性产生不同的影响。然而,当前指标体系中尚未关注不同指标之间重要程度的动态性差异对于冲突危险性的影响。因此,本文将引入信息熵来对指标体系中各指标赋权,刻画不同事件中冲突航空器不同的飞行诸元分布对于冲突危险性的动态影响。基于这一现状,本文关注提升空管运行安全的决策支持能力建设,进一步完善对于飞行冲突属性的描绘,研究飞行冲突实时指数计算模型,根据运行事件特征,建立飞行冲突评估模型和方法,为空中交通安全管理部门开展飞行冲突评估及调查工作提供支持。
2. 飞行冲突危险性指标体系
2.1. 指标体系构建
为了确保冲突危险性评估在当前空域环境、技术条件下的适用性与可操作性,以及分析所需数据的可获取性。本指标体系在表1中所罗列的基础指标在结合一线员工工作经验的基础上,从各国以及地区的航空安全管理部门用以评估空中交通冲突严重等级的指标体系中进行筛选。筛选范围涵盖了我国、欧盟、美国和澳大利亚等关于飞行冲突危险性评估的相关法规和文献。指标体系共涵盖航空器间隔、航空器接近速度、航迹夹角、空域繁忙程度、空域复杂性五个类别,每个类别下设多个指标,共计8个。

Table 1. Evaluation index system of flight conflict risk
表1. 飞行冲突危险性评估指标体系
2.1.1. 飞行动态类指标
(1) 航空器间隔
航空器间隔即发生冲突的航空器对之间的物理距离,该类别指标用以体现冲突航空器空间上的相对位置,包含了垂直间隔与水平间隔用以区分航空器高度与航向改变上存在的差异,以及不同方向间隔大小所带来不同的危险性影响。航空器间隔是否突破最小间隔阈值是评价航空器是否发生飞行冲突的判断依据,因此航空器冲突危险性评分将首先满足间隔被突破的条件。
(1)
VSm即为在相应高度层飞行时,航空器间的最小垂直间隔,航空器在在8400米(含)以下的高度层飞行时VSm为300 m,12500 m (不含)以上时为600 m。
(2)
水平间隔即通过二次雷达数据获取冲突航班的经纬度信息进行计算,上式中HS代表冲突航空器对之间的水平间隔(米),相应的HSm即为最小水平间隔。在雷达管制下,航空器位于6000 m含以下的高度层飞行时HSm为6 km,6000米以上为10 km。
(2) 接近速度
Table 2. Approaching speed of collision aircraft
表2. 冲突航空器对接近速度
航空器接近速度即航空器对之间实时间隔的变化速率用以体现冲突的恶化或缓解情况,如表2所示,其中包含了垂直接近率与水平接近率体现冲突的紧迫程度。航迹夹角即航空器对之间水平方向上的相对运动趋势,用以区分汇聚(对头、交叉)、平行、分散等航空器对之间不同的相对运动状态所带来的危险性的差异。
(3) 航迹夹角
航迹夹角结合航空器的间隔与接近速度这三个指标类别完成了对于航空器相对运动的矢量描述,将更加立体的刻画冲突航空器对的运动轨迹以表征冲突的紧迫程度。式3表征了航空器航迹汇聚时的带来的危险性,但当航空器相遇过后航迹开始分散时,航迹夹角将不再产生危险性即 ,其中T表示航空器对的航迹夹角,单位为˚。
(3)
考虑到两架航空器在雷达管制下使用侧向偏置在航路航线上运行时,航空器水平方向上的接近速度被削弱,对于水平接近率以及航迹夹角的得分需要进行一定的修正。修正系数 ,其中G为航空器偏置运行时实际的偏置距离。
2.1.2. 空域环境类指标
空域繁忙程度即客观的空域状态,本体系通过客观的流量与容量的壁纸进行体现。空域的繁忙程度一方面可以作为飞行冲突的原因,另一方面在冲突解脱的过程中也会成为妨碍解脱顺利执行的影响因素。通话饱和度即冲突发生时使用的甚高频波道的拥挤状况,从另一个方面反映了管制员在处理冲突时的繁忙程度以及可能发生的机组掐话所引起的冲突解脱不及时等,表3中R即波道的通话饱和度。
Table 3. Airspace busy degree and airspace complexity
表3. 空域繁忙程度与空域复杂性
空域复杂性即其他航空器对冲突解脱的限制,通过潜在冲突航空器数进行体现。在发生冲突的航空器进行机动飞行产生了预案以外的高度层资源以及水平范围占用,在这些空域资源被其他航班占用时便会产生新的冲突,从而迫使管制员改变原有的空域资源配置避免额外的风险,本体系将这些管制员需要关注的航班定义为潜在冲突航空器数。潜在冲突架次的统计方法将从空间范围以及接近趋势两个方面对空域内的航班进行筛选。
2.2. 冲突危险性计算方法
2.2.1. 权重设置
熵最早来自热力学理论,由著名数学家C. E. Shannon引入信息论,用来表示信息含量的多少。熵权法是一种基于熵理论的客观赋权代表,该算法主要基于系统中各个元素所包含的信息熵获得权重值。按照信息论的基本原理,信息是一种系统有序程度的度量;熵是一种不确定性的度量,用来形容信息的相对影响程度。通常来说,某个元素的信息熵越小,其离散性越大,所包含的信息数量越多,在评估过程中的影响力也越大,其权值相应也越大。熵权法是依据指标自身所包含的信息熵来确定其权值大小,因此能够有效地减少评价中主观因素带来的影响和误差。
2.2.2. 冲突危险性统计
为了体现冲突危险性的动态性变化,本文将以一秒为时间片统计冲突航空器同时小于HSm以及VSm阶段的各指标值,作为冲突危险性计算的基础。目前世界各国以及地区的民航当局制定的空中交通飞行冲突危险性的指标计算中,各方多采用累加法将多个飞行冲突影响因素加权后相加,从而获得最终的危险性结果。本体系拟采用熵权法计算各影响因素的权重,为了避免指标相关性过高对最终结果造成影响,本体系将相关度较高的指标整合为指标类别,而在指标类别内部本体系将各项指标对于类别的重要程度视为同等重要,指标类别得分等于类别下属指标得分的均值。举例来说,某个时间片在类别1的航空器间隔中,该类别的指标值 , 分别代表了垂直间隔以及水平间隔的得分,即垂直间隔与水平间隔对航空器间隔这一类别的危险性贡献相同。则最终该时间片的飞行冲突危险性得分即:
(4)
3. 飞行冲突危险性实例验证
3.1. 事件危险性指标计算
3.1.1. A事件描述
某年某月某日,在我国境内某管制区发生了一起由于管制员误发高度穿越指令造成的小于间隔事件A。事发前两架航空器在同一航路保持300 m高度差相对飞行,在两机小于20 km时管制员指挥高高度航班下降高度,该指令导致高高度航班存在小于最小水平间隔的情况下穿越低高度航班高度的风险。两机水平间隔小于10公里时出现短期冲突告警,随后开始执行冲突解脱。管制员在航空器小于规定间隔后才采取纠正措施,冲突整体处于可控状态但冲突解脱不及时。但由于此事件中航空器对位于同一条航路上相对飞行,且其中一架冲突航空器执行了侧向偏置3 nm的偏置程序,故而进行冲突危险计算时,需要弱化水平接近率以及航迹夹角的得分(修正参数k = 0.442)。
3.1.2. A事件冲突危险性指标
表4中罗列了基于冲突危险性指标体系计算得到的冲突航空器在27个小于最小安全间隔时间片内各冲突指标类别的评分。考虑到航空器高度改变具有惯性,机组已经难以立即保持高度,故而管制员采取了高度穿越的方式建立重新安全垂直间隔,致使在此阶段的航空器间的垂直间隔持续剧烈减小,虽然水平间隔先减小后增大但幅度较小,故而航空器间隔带来的危险性持续上升。由于本事件中的冲突航空器相对飞行的一方执行了侧向偏置,随着航空器的持续接近水平速度矢量(航空器假设水平速度不变)在水平距离矢量上的投影逐渐缩短直至相切时垂直,故而水平接近速度呈持续减小趋势。但航空器的垂直接近速度存在一定的波动,故而接近速度得分在整体下降的背景下出现了几处接近速度危险性的高峰。受益于管制员及时有效的冲突解脱,冲突航空器仅在1~14个时间片内保持了相对态势,第15时间片开始航空器航迹便开始分散,航迹夹角带来的危险性下降至0。通过自动化系统数据计算得到,事发当时扇区流容比为55.56%且通话饱和度为41.67%,故空域繁忙程度得分35分表征中等的繁忙程度。
Table 4. Score of conflict risk index system
表4. 冲突危险性指标体系得分
基于信息熵计算表4中6个指标类别的熵权,描述航空器航行诸元变化的指标类别重要性占据了主导地位,其中表征航空器运动态势的航空器接近速度与航迹夹角指标类别的权重较高,分别达到了0.211和0.209,表征冲突结果的航空器间隔指标类别次之,权重为0.171。由于描绘空域繁忙程度的指标没有发生变化,故该类别权重最低为0.162。空域复杂性由于变化剧烈,故带来的危险性影响最高,达到了0.247。相较于局方原有的标准的权重占比,由于本体系具有动态性分析特征,故而将从结果导向(间隔指标占比高)的权重设置向运动态势倾斜,更加关注在当下时间片的航空器运动态势可能带来结果的危险性。
3.2. 冲突危险性实例对比分析
3.2.1. A事件冲突危险计算合理性
为了验证本文构建的指标体系以及相应计算方法的合理性与有效性,这里将使用本体系计算得到的飞行冲突危险性与局方现行标准《民用航空器事故征候》(MH/T2001-2015)通过图1进行对比,在不同标准下该事件均未突破事故征候判定阈值,可以定义为不安全事件。局方标准在尚未建立水平间隔时极小的垂直间隔致使本事件在26~27时间片航迹已经分散之后才取得了危险性的最高得分54.768。而在10~12时间片取得的危险性次高得分为54.282分。但是,显然在航空器航迹尚未分散之前,其不断汇聚的态势所带来的危险性显著高于不再具有碰撞风险的航迹分散时段。因此我们可以看出,局方目前执行的标准在一定程度上忽略了航空器的动态运动趋势可能带来的危险结果,这个问题不仅来自于对垂直接近速度的忽视还受到过度关注实际间隔的影响。
本事件冲突阶段的危险性均分为26.41分,最高点在第6个时间片取得33.48分,整体危险性较低。总体来说,本指标体系与局方标准计算得到的危险性分数在对飞行冲突危险性变化趋势的描述上具有一定的相似性,但在局部细节上包含了更多且更精确的信息故显现出了差异,进一步完善了对于飞行冲突危险性的描述。本体系在航迹分散前(1~14时间片)在高位保持一段时间后持续下降,没有出现局方标准先上升后下降的过程,这是由于垂直接近率以及潜在冲突航班的影响,弥补了局方标准视角缺失的部分飞行冲突危险性影响因素。故而本体系计算结果在第6时间片上述两个因素共同作用下达到了危险性的最大值,而当潜在冲突航班数量在第8个时间片后减少故其带来的危险性也随之下降,飞行冲突的危险性则出现了与局方标准一致的持平特征。在航迹分散后(15~27时间片)改进指标体系计算结果呈现为持平的态势,并出现少于由于垂直方向上间隔以及接近速度变化带来的波动。这里可以解释为在航空器航迹发散过后,虽然垂直方向上的距离仍然在持续缩小,但由于水平方向上的远离使得冲突航空器已经不存在相撞的风险,冲突危险性不应再进一步增加。总而言之,本体系相较于局方标准,除去空域运行态势外,在航空器航行诸元中更加关注了冲突的演变趋势与动态特征,使得评价结果更加合理且完备地描述了冲突的演变过程。
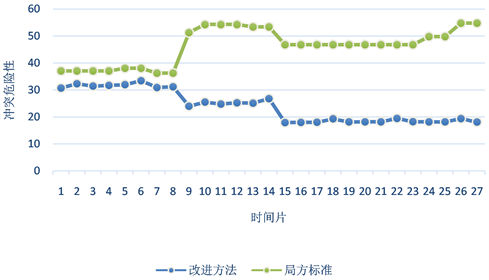
Figure 1. Comparison of new and old risk systems for flight conflict event A
图1. 飞行冲突事件A危险性新旧体系对比
3.2.2. 多事件危险性对比
基于实际飞行冲突事件的雷达数据计算了四个事件的飞行冲突危险性并进行对比,并在图2中进行了展示。除去前文提及的事件A以外,其余事件的冲突危险性呈现为与局方标准较为一致的变化趋势以及更为丰富的局部细节特征。事件B的冲突时间片较短,1~3时间片更加平滑的描述了航空器垂直间隔从临界处突破界限的过程,使用平滑的方式取代了局方标准对于间隔因素的过度关注,更加准确的描绘冲突危险性的变化态势。事件C由于缺少冲突解脱过程,冲突危险性的变化描绘了航空器从相遇到远离的过程相对较为单调,但是在增加了空域类指标之后我们关注到冲突危险性在27往后的时间片中由于潜在冲突架次的增加呈现为上升趋势,完善了对于冲突发生过程中的空域运行环境的差异对于冲突危险性的影响。受益于引入了垂直接近率的飞行特征描述,事件D在23个时间片时由于垂直接近率的不断减小,呈现出更加直接且迅速的下降态势,改进体系更加精准的描述了危险性的动态变化。
为了进一步验证信息熵在权重计算中的有效性。在飞行冲突危险性评分中最为核心的部分仍然为飞行诸元的评价,如表5所示的四个事件中,航空器间隔、航空器接近速度、航迹夹角类指标的权值和占比较为接近,均分布在60%附近。四个事件中航空器间隔类指标的权值大与飞行冲突的间隔缩小程度呈正相关,即间隔越小间隔类指标权重越高(A事件最小垂直间隔221米/最小水平间隔8.03公里,B事件264米/9.37公里,C事件242米/9.27公里,D事件,122米/4.84公里)。航空器接近速度的分布则较为直

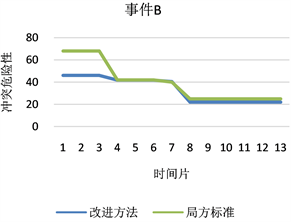
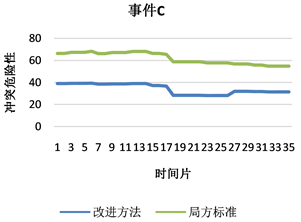
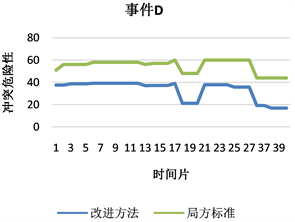
Figure 2. Comparison of flight conflict risk cases
图2. 飞行冲突危险性实例对比
Table 5. Index weight comparison of flight conflict events
表5. 飞行冲突事件指标权重对比
观,由于A、B、C事件的发生空域均属于区调管辖,冲突航空器的飞行高度高、速度大,直接导致上述三个事件的接近速度权值高于发生在进近区域的D事件。从航迹夹角来看,事件B与事件D中航空器夹角发生了持续的转变,表现为航迹夹角上的权重高于事件A、C。在空域运行状态类的指标类别空域繁忙程度以及交通复杂性中,指标权重分布同样有效的描述了事件的差异。由于事件A、C中存在潜在冲突航空器,故其交通复杂性的权重显著高于事件B、D,相应的由于B、D事件中未发现潜在冲突航空器,造成了指标值未发生改变,故而其交通复杂性与空域繁忙程度提供了相同的危险性权重贡献。
4. 总结
飞行冲突危险性的科学评估是空中交通安全管理的重要环节,基于局方现行标准完善飞行冲突危险性评估体系将有助于提升系统安全性。本文筛选航空器运行特征、管制员人为因素以及空域运行环境等因素对于飞行冲突危险性的影响,重构飞行冲突危险性指标体系与评分标准。基于实际冲突事件,计算飞行冲突危险性评分,并借助信息熵给体系中的指标赋予客观权重。对比局方现行标准与本指标体系计算结果的差异,结果显示本体系和局方判定结论在总体上保持一致,并在局部细节上完善了现行体系忽略的影响因素,实现了飞行冲突危险性更加全面精准的评估。综上,本体系对于实际运行中出现的飞行冲突具有较强的适用性,将有助于提升我国飞行冲突危险性的评估能力,从而保障飞行安全水平稳定提升。
基金项目
2020民航安全能力建设基金《机场协同决策(A-CDM)技术规范》项目支持。
文章引用
霍达,丛玮,谢道仪. 基于信息熵的飞行冲突危险性评估
Estimation of Risk of Air Traffic Confliction Based on Information Entropy[J]. 交通技术, 2021, 10(01): 49-58. https://doi.org/10.12677/OJTT.2021.101007
参考文献
[1] ICAO (2013) Annex 19 Safety Management. APP 2-1-APP2-4.
[2] ICAO (2010) Annex 13 Investigation of Aircraft Accidents and Incidents. ATT C-1-ATT C-2.
[3] European Aviation Safety Agency (2014) Annex to ED Decision 2014/035/R: Acceptable Means of Compliance and Guidance Material for the Implementation and Measurement of Safety Key Performance Indicators (SKPIs).
[4] 中国民用航空局. MH/T 2001-2018 民用航空器事故征候[S]. 2018.
[5] Australian Transport Safety Bureau (2013) Loss of Separation between Aircraft in Australian Airspace.
[6] Bailey, L.L., Schroeder, D.J. and Pounds, J. (2005) The Air Traffic Control Operational Errors Severity Index: An Initial Evaluation.
[7] 王昌顺. 中国民航安全管理研究[D]. 中国科学技术大学, 2008.
[8] 徐佳璐. 我国民航空中交通安全管理体系构建和评估[D]. 浙江工业大学, 2012.
[9] 贾贵娟. 空管安全风险评估指标体系及综合评价研究[D]. 武汉理工大学, 2008.
[10] 徐肖豪, 李冬宾, 李雄. 飞行间隔安全评估研究[J]. 航空学报, 2008(6): 1411-1418.
[11] 潘卫军, 张智巍, 张晓磊, 陈佳炀, 王思禹. RECAT尾流间隔标准下对REICH碰撞风险模型的改进[J]. 航空计算技术, 2019, 49(3): 6-9.