Modeling and Simulation
Vol.
13
No.
01
(
2024
), Article ID:
79553
,
10
pages
10.12677/MOS.2024.131047
无人机遂行飞行中的纯方位无源定位
梁磊,李浩然,王耀,舒常江*
桂林信息科技学院机电工程学院,广西 桂林
收稿日期:2023年11月1日;录用日期:2023年11月27日;发布日期:2024年1月19日

摘要
本文针对无人机编队飞行时的无源定位问题,基于纯方位无源定位方法和极坐标函数推导,对无人机遂行编队飞行时位置信息进行理论分析,建立几何模型,讨论求得部分无人机的位置信息。通过建立极坐标系,给出编队飞行过程中位置调整方案,同时针对圆周上的无人机编队三点定位,利用信号源与信号接收源之间的位置偏差建立几何模型进行定位,该方法充分考虑到了外界对无人机集群飞行时的电磁干扰问题,具有较高的准确性和普适性。
关键词
无人机,纯方位无源定位,极坐标系,正弦定理

UAVs Carry out Azimuth-Only Passive Localization in Flight
Lei Liang, Haoran Li, Yao Wang, Changjiang Shu*
School of Mechanical and Electrical Engineering, Guilin University of Information Technology, Guilin Guangxi
Received: Nov. 1st, 2023; accepted: Nov. 27th, 2023; published: Jan. 19th, 2024

ABSTRACT
In this paper, based on azimuthing-only passive positioning method and derivation of polar coordinate function, the position information of UAV in formation flight is analyzed theoretically, the geometric model is established, and the position information of some UAV is discussed and obtained. By establishing polar coordinate system, the position adjustment scheme during formation flight is given. At the same time, aiming at three-point positioning of UAV formation on the circumference, a geometric model is established by using the position deviation between signal source and signal receiving source. This method fully takes into account the external electromagnetic interference of UAV cluster flight, and has high accuracy and universality.
Keywords:UAV, Azimuth-Only Passive Positioning, Polar Coordinate System, Sine Theorem

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着时代的不断发展和进步,无人机的应用更加广泛,尤其是在军事中尤为突出。在军事中无人机因为其体积小、机动性强、能有效避免人员伤亡等优点,在军事领域得到了广泛的应用。无人机携带军事武器时,可以精准打击敌方目标;因其不需要飞行员驾驶进行操作,无人机可以减少不必要的人员损失,从而有效提高部队的行动力和作战能力;无人机还可以充当与其他战斗机共同进行军事训练或演习的目标飞机 [1] 。无人机编队执行军事作战任务是未来战争中的一种必然趋势 [2] 。
Kovavisaruch等 [3] 建立了时差定位技术下的双迭代求解定位方程算法,同时提出修正的Taylor级数法。Fard H T等 [4] 用Taylor展开求解时差定位的最大似然问题完善定位方程解算问题的研究。Dexiu Hu等 [5] 对因多普勒压缩引发频差定位精度降低的问题给出一种以时差定位、频差定位为基础的差分多普勒速率估计方法。陈云龙 [6] 对无源时差定位方法中的时延估计算法进行优化。韩璐潞 [7] 对基于时差与频差对无人机无源定位的精度给出提高方法。于小强 [8] 着重研究时差频差联合定位中定位参数估计、位置解算算法和目标跟踪滤波算法。王睿 [9] 以时差频差联合定位算法为蓝本,构建新的双站无源定位模型,在已构建的模型基础上建立双站运动对象的运动状态参数估计模型。徐海源等 [10] 在多站无源定位系统中对信号抵达相异观测站的时差进行研究。孙浩宸 [11] 在双站无源定位的基础上建立了单站无源定位系统并对建立的系统进行模拟现实实验。
多机无人机编队具有很多突出优势:1) 可扩大探测视野。2) 可以有效提高编队整体的命中效率和任务成功率。3) 可降低整体飞行阻力,从而延长电池寿命 [12] 。因此多机无人机编队在执行任务时具备对各种干扰能力强、编队可运行时间长、执行效率高等优点。因此,编队控制在许多领域都具有十分广阔的应用前景。
在无人机执行任务时,常是以遂行编队飞行的,而为了避免在飞行过程中不受到外界干扰,所有的飞机都尽可能保持电磁静默,少向外界发送信号。为了使其编队队形不乱,常采用纯方位无源定位的方法来调整飞机的位置。纯方位无源定位,即由编队中的某几架无人机发射信号、其余无人机别动接受信号,从中提取方向信息进行定位,来调整无人机的位置,利用多个无人机的信息,共享位置信息,可实现对目标无人机的快速高精度协同定位。
2. 模型建立与求解
2.1. 无人机三点定位模型
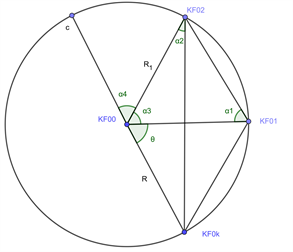
根据无人机的位置分布图(见图1),以FY00无人机与FY01无人机建立极坐标系,由于其余无人机均处于同一高度,则建立4架无人机的集合关系图(见图2),其中θ为FY0k无人机与极轴的夹角。

Figure 1. Drone map
图1. 无人机分布图
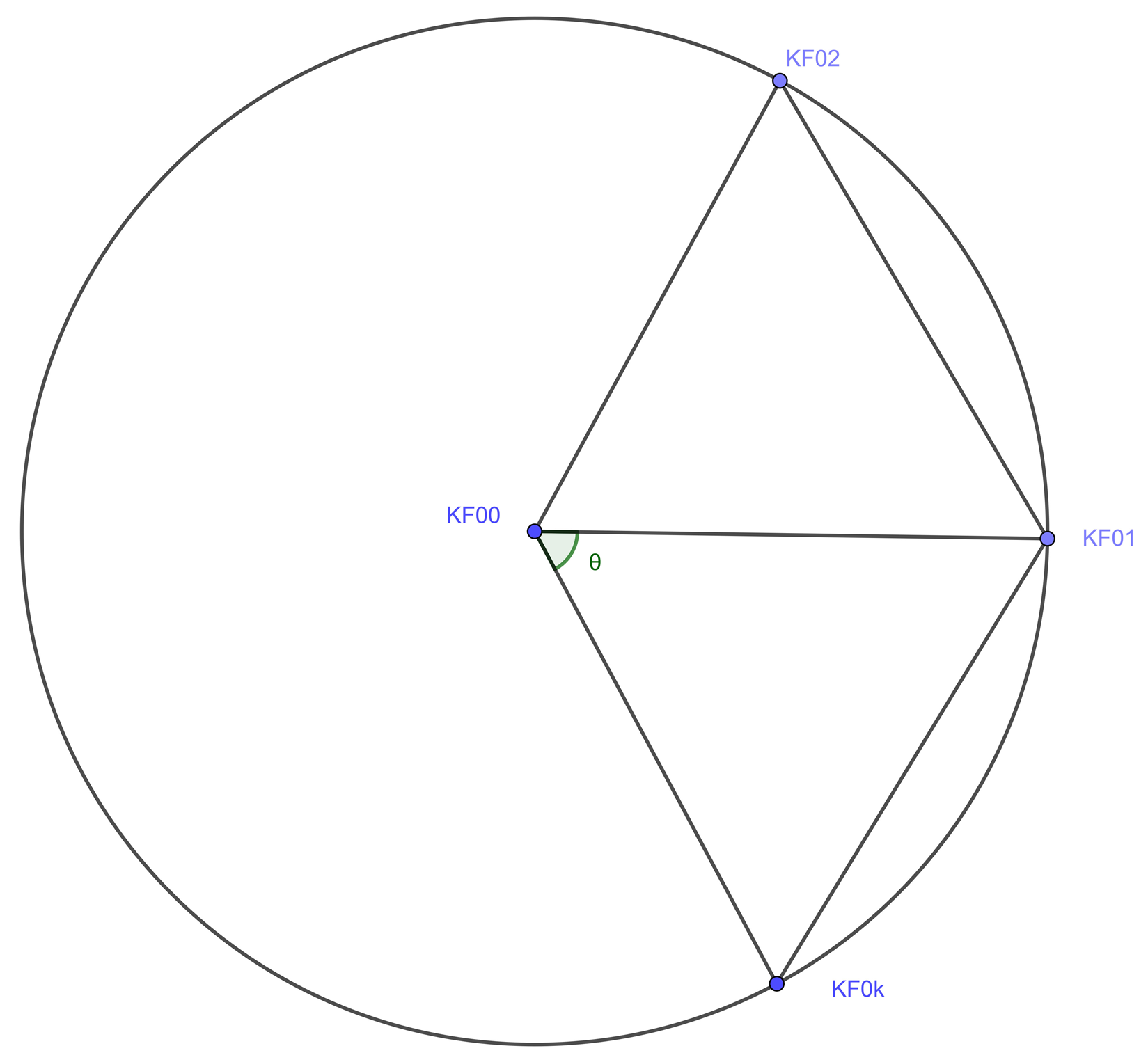
Figure 2. Four of the drones are assembled
图2. 其中四架无人机集合关系图
当该被动接收信号的无人机的位置是略有偏差时,其所在位置极角和与极径均有可能发生改变,故本文考虑以下三种情形:
(1) 仅极角偏差:在和FY00的距离不变的情况下,角度发生了偏差。
(2) 仅极径偏差:在角度不发生偏差的情况下,极径发生了偏差。
(3) 极径和极角都有偏差:已知FY00无人机和FY0k两点,但FY0k在圆周上的极径和极角都有偏差。
下面将从分别对这三种情况进行分析:
(1) 仅极角偏差
此时极径保持不变,被动接收信号的无人机位置有两种不同情形,如图3中的(a)和(b)所示,由于FY0k的极径不变,所以可以知道FY0k仍然是在圆周上的,所以其极径仍然为R,所以在图3(a)与图3(b)中的四边形都是符合等腰三角形的性质的,所以要想知道FY0k正在圆周上的极角,通过运用圆中等腰三角形的性质便可以求解。
首先通过图3(a)可以在该四边形中得出:
(1)
又因为三角形的内角和为180˚,由此可以得知:
(2)
因此将等式(2)代入到等式(1)中便可以得到:
(3)
因此无人机FY0k的坐标为:
图3(a)情况下: 。
同理,在b情况下通过相同的方法便可以求得FY0k的坐标为:
图3(b)情况下: 。
 (a)
(a)
 (b)
(b)
Figure 3. FY0k In addition to the two known drones; (b) FY0k between two known drones
图3. (a) FY0k在已知两架无人机之外;(b) FY0k在已知两架无人机之间
(2) 仅极经偏差
在被动接收信号无人机在圆周中的角度不发生偏差时;考虑极径变化情况如图4所示。
 (a)
(a)
 (b)
(b)
Figure 4. (a) FY0k In addition to the two known drones; (b) FY0k between two known drones
图4. (a) FY0k在已知两架无人机之外;(b) FY0k在已知两架无人机之间
图4(a)中已知θ = β1 + β2,针对图形,我们用过三角形的正弦定理,最终可以得到公式(4):
(4)
公式(4)中,首先对第一个公式进行化简可得:
(5)
然后根据图形可知:
(6)
最后将上式代入等式(5)中便可以求得无人机的极径r。
然后通过三角形的内角和为180˚,在图中可以求得:
(7)
而无人机的极角θ为:
(8)
最终得到情况图4(a)下无人机的位置为;
同理由图4(b)可得:
(9)
故解得图4(b)情形下被动接收信号无人机FY0k的位置分别为:
(1)
(3) 极径和极角都偏差的情况
考虑到被动接收信息的无人机FY0k的极径和位移都发生了关系,几何模型如下(见图5):

Figure 5. A geometric model of the relationship between the polar diameter and displacement of the UAV
图5. 无人机FY0k的极径和位移都发生了关系时的几何模型
通过对图5的分析,利用正弦定理,可以得出关系式:
(10)
对方程组进行求解,通过第二个公式可以得到:
(11)
然后把公式(11)带入到第一个公式中,然后左右两边同时乘以 消去R,从而得到:
(12)
最后左右相乘,然后化简可得:
(13)
最后化简便可得无人机的极角θ。
然后下一步通过二式还可以化简得:
(14)
然后对该式代入到第一个等式中:
(15)
接着对等式进行进一步的化简:
(16)
最后将以上等式化简,便可以求出无人机的有效定位:
(17)
模型验证:通过上述方法最终得到了关于无人机飞行时位置的准确信息,但是由于该模型计算量比较大,且化简过程相对复杂。因此我们通过MATLAB对该模型进行了多次数据模拟,通过多次改变已知无人机的位置,进而获得所求的无人机的准确位置。从而验证了模型的准确性。
2.2. 多无人机有效定位模型
 (a)
(a)
 (b)
(b)
Figure 6. The drone FY0k is between FY0j and FY01; (b) the drone FY0k is between FY0j and FY0h
图6. (a) 无人机FY0k在FY0j和FY01之间;(b) 无人机FY0k在FY0j和FY0h之间
利用模型一中的模型和图形位置对称的思想,判断要想将整个圆周中无人机的位置都确定需要多少无人机发射信号。
假设以圆周中心位置的FY00无人机为原点,FY00与FY01之间的连线为极轴建立极坐标系。以FY00为圆心,半径R = 100 m建立一个圆。
在模型建立的过程中我们还考虑到两种情况:
(1) 接收到信号的无人机FY0k在FY0j和FY01之间(如图6中的(a)图),即k < j。
(2) 接收到信号的无人机FY0k在FY0j和FY0h之间(如图6中的(b)图)即h < j < k。
图6(a)情况下,可以得出一下方程:
(18)
通过解方程组,化简第二个等式可得:
(19)
化简第三个等式可得:
(20)
然后将其余等式代入等式(19)中得到:
(21)
化简等式(20)可以得到:
(23)
最后将以上公式整合后,便可以解出其中的未知量,即被动接收信息的无人机FY0k的极径r和极角θ。求解结果为:
(24)
(25)
因为两种情况都基于同一种方法,因此同理可得该方程组求解求出FY0k的极径和极角。求解结果为:
(26)
模型验证:本模型基于模型一的三点定位的基础上,若要求出定位无人机的有效定位,需再由一架无人机发射信号即可。因为通过问题一的模型可以知道,由三点定位法便可以大概求出未知无人机的有效定位。但是为了更精准的确定该无人机的定位,通过更改已知无人机中的一架问人机,然后通过问题一的方法,再次确定未知无人机的有效定位,通过前后两次的结果便可以确定该无人机的有效定位。这种方法具有一定的合理性,因此使模型具有准确性。
3. 结论
针对无人机编队飞行时的无源定位问题,基于纯方位无源定位方法和极坐标函数推导,对无人机遂行编队飞行时位置信息进行理论分析,建立几何模型,讨论求得部分无人机的位置信息。同时通过极坐标轴建立的几何模型中,解析了编队在飞行过程中队伍略有偏差的调整方案以及队形发生改变时的无人机精准定位。三点定位模型从控制变量的角度考虑了多种情况出现的不同现象,考虑的方面较为全面,同时结合了几何图形,通过将无人机的坐标位置在极坐标图上标记出,然后通过无人机位置构建出无人机之间的几何图形,通过几何图形以及三角函数对未知无人机的位置进行求解,这种方法可以更清晰、直观的看出无人机之间的位置关系,从而使结果更加准确。多无人机有效定位考虑了两种情况,将多种情况包含在内,整个过程虽然较为复杂,但却更全面。通过本论文所得到的模型,可以直接求解出到无人机编队位置发生变化时各个无人机的位置信息。
基金项目
2023年自治区大学生创新创业训练项目(基于数学模型的无人机遂行飞行中纯方位无缘定位模型研究,S202313644048,负责人:梁磊);桂林电子科技大学信息科技学院2020年科研项目(XJ202025);桂林信息科技学院2022年科研项目(XJ202218)。
文章引用
梁 磊,李浩然,王 耀,舒常江. 无人机遂行飞行中的纯方位无源定位
UAVs Carry out Azimuth-Only Passive Localization in Flight[J]. 建模与仿真, 2024, 13(01): 488-497. https://doi.org/10.12677/MOS.2024.131047
参考文献
- 1. 齐斌凯. 无人机编队控制技术研究[D]: [硕士学位论文]. 长春: 长春理工大学, 2020.
- 2. 韩维, 吴立尧, 张勇. 舰载战斗机/无人机编队飞行控制研究现状与展望[J]. 科学技术与工程, 2019, 19(36): 73-80.
- 3. Kovavisaruchl, H. (2005) Al-ternate Source and Receiver Location Estimation Using TDOA with Receiver Position Uncertainties. IEEE International Con-ference on Acoustics, Speech and Signal Processing, Philadelphia, 23-23 March 2005, 30-41.
- 4. Fard, H.T., Atashba, R.M., Norouzi, Y., et al. (2013) Multi References TDOA-Based Source Localization. Turkish Journal of Electrical Engineering and Computer Sciences, 21, 1920-1929.
- 5. Hu, D., Huang, Z., Zhang, S., et al. (2018) Joint TDOA, FDOA and Differential Doppler Rate Estimation: Method and Its Performance Analysis. Chinese Journal of Aeronautics, 31, 137-147.
- 6. 陈云龙. 无人机无源时差定位方法研究及实现[D]: [硕士学位论文]. 西安: 西安电子科技大学, 2021.
- 7. 韩璐潞. 基于时差和频差的无人机对干扰辐射源无源定位研究运用[J]. 中国新通信, 2021, 23(19): 62-63.
- 8. 于小强. 基于时差频差的多机无源定位及跟踪算法研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2021.
- 9. 王睿. 运动双站时频差定位方法研究[D]: [硕士学位论文]. 成都: 电子科技大学, 2021.
- 10. 徐海源, 苏成晓, 刘亚奇. 运动多站无源定位中的时差及其变化率估计方法[J]. 电子信息对抗技术, 2022, 37(3): 26-30.
- 11. 孙浩宸. 单站无源目标定位方法研究[D]: [硕士学位论文]. 哈尔滨: 东北林业大学, 2020.
- 12. 齐斌凯. 无人机编队控制技术研究[D]: [硕士学位论文]. 长春: 长春理工大学, 2022.
NOTES
*通讯作者。