Journal of Electrical Engineering
Vol.
10
No.
02
(
2022
), Article ID:
52333
,
8
pages
10.12677/JEE.2022.102011
基于磁流变阻尼器的变压器半主动减振控制 研究
翟凌晨,印心童,葛浩然,张海龙,王恩荣
南京师范大学电气与自动化工程学院,江苏 南京
收稿日期:2022年3月25日;录用日期:2022年6月6日;发布日期:2022年6月13日

摘要
变压器在运行时自身振动和受到的环境扰动,会导致变压器本体部件的松动,影响变压器正常运行,当前对变压器振动的分析及减振研究受到了广泛关注。本文将磁流变阻尼器(magneto-rheological damper, MRD)运用到变压器减振中,设计变压器半主动减振系统和MRD控制算法,在内部和外部激励作用,对比分析不同控制算法下对变压器振动加速度的减弱。仿真结果表明,在不同激励作用,与不加控制情况相比,开关控制最大实现了对振动加速度26%减弱,改进型模糊开关控制在开关控制的基础之上对振动加速度实现了17%的减弱。
关键词
变压器半主动减振,磁流变阻尼器,开关控制策略,模糊开关控制器

Research on Semi-Active Damping Control of Transformers Based on Magnetorheological Dampers
Lingchen Zhai, Xintong Yin, Haoran Ge, Hailong Zhang, Enrong Wang
School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing Jiangsu
Received: Mar. 25th, 2022; accepted: Jun. 6th, 2022; published: Jun. 13th, 2022

ABSTRACT
The transformer itself vibrates and is disturbed by the environment during operation, which can lead to the loosening of the transformer body parts and affect the normal operation of the transformer. The analysis of transformer vibration and damping research is currently receiving a lot of attention. In this paper, magnetorheological dampers are applied to transformer damping to design a semi-active damping system for transformers and MRD control algorithm to compare and analyze the damping of transformer vibration acceleration under the action of internal and external excitation with different control algorithms. The simulation results show that under different excitation, compared with the case without control, the switching control can reduce the vibration acceleration by 26%, and the improved fuzzy switching control can reduce the vibration acceleration by 17% based on the switching control.
Keywords:Transformer Semi-Active Damping, Magneto-Rheological Damper, Switching Control Strategy, Fuzzy Switch Controller

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
变压器是电力系统中的一个关键和昂贵的设备。电力系统中的变压器停电,维修或更换成本高且耗时长。变压器在电力输送的过程中起到重要作用,它能够将高电压转变为成可用的电压。从电网系统的角度看,变压器具有关键性作用,一般来说,如果变压器出现故障问题,就会对整个电力网络产生不良影响,还会危害人们的正常生活。所以必须确保变压器的安全运行,还要保证变压器的质量,减少因振动噪声而引发的故障问题。如果设备在运行的时候出现因振动而引发的故障问题,那么就要做好相应的检修和处理,从而更好地解决实际问题,同时降低设备运行过程中出现的损失,保护变压器 [1]。
目前众多学者对变压器减振措施进行了研究,国外有文献 [2] 为变压器开发了一个高效和经济的抗震改造系统。该改造系统由旋转摩擦阻尼器和安装在变压器两侧的预应力筋组成,以限制其薄弱方向的横向位移。此外,高阻尼橡胶垫和钢筋位于变压器的底部,以减少振动时变压器的摇晃。旋转摩擦阻尼器–钢筋系统有望通过减少地震中变压器的横向挠度和地震惯性力来提高变压器的抗震性能。通过振动台试验和非线性动态分析,验证了改造系统的有效性。文献 [3] 以一个位于城市居民楼中的变电站为例设计并安装了多孔共振吸声结构对于阻碍振动传播,确定并选择了单层隔离器的性能参数。国内孙春平 [4] 以具有代表性的居民小区配电房为例,分析了变压器振动噪声传递路径,建立了配电房结构传声的模型,采用共振法对其振动特性进行实验,证实了减振装置良好的性能。潘家玮 [5] 从变压器振动对人体的危害出发,对变压器进行的整体分析,并分析铁芯和绕组的噪声产生原因及传播路径,分别对变压器内部外部采取了不同方法来减少变压器振动带来的危害。杨龙宇 [6] 从整体系统入手考虑来对变压器进行减振,对基础采取分层结构,在不同部位设置橡胶,周围设置减振屏障等手段来减少变压器振动。洪陈玉 [7] 以某小区变压器减振工程实践案例为基础,提出了双层隔振系统设计方案。陆昕等人 [8] 通过在变压器下方加装减振底座,测量结果验证了其效果。
可以看出,传统的变压器的减振措施大多都是从机械结构方面来实现的,比如设置双层隔振、在底部加装减振橡胶等措施,即抑制振动传递途径,这些传统的减振措施虽易于实现但是减振效果不佳,有待改进。
2. 建立变压器模型
2.1. 变压器模型
提出了如下的变压器模型,其动力学模型如图1所示。在变压器减振系统中变压器视为一个刚度为 ,阻尼为 ,变压器的质量为 ;基础则等效为一个阻尼为 ,刚度为 ,质量为 的质量–弹簧–阻尼系统。动力学方程如式(1)和(2)所示。变压器参数如表1所示。
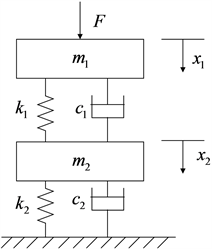
Figure 1. Transformer structural vibration model
图1. 变压器结构振动模型
动力学方程如式(1)和(2)所示。变压器参数如表1所示。
(1)
(2)

Table 1. Transformer parameters
表1. 变压器参数
2.2. 磁流变阻尼器的Bouc-Wen模型
Bouc-wen模型是由Wen于1976年提出的,是一种容易进行数值计算且能广泛模拟滞回系统的模型,该模型能很好的描述MRD的力位移关系,也可以较好的描述阻尼器低速时的磁滞特性。
本文MRD选用的是Bouc-wen模型,其方程表达式如式(3)所示。
(3)
式中: 为MRD所产生的阻尼力; 为磁流变液的阻尼系数; 为刚度系数;x为位移; 为初始位移; 为滞回变量 的系数;其中滞回变量为
(4)
式中:n为曲线圆滑系数; 为滞回模型的宽度调节系数; 为滞回模型的高度调节系数;A为比例系数。
3. 基于MRD的变压器半主动减振系统设计
3.1. 半主动控制系统设计
该减振系统包括MRD和半主动控制器两个部分。其中包括MRD和励磁线圈。控制系统包括半主动控制器。半主动控制器基于传感器传来的变压器内部结构振动状态信号,基于控制算法得到驱动电流,经过电流驱动器输出至励磁线圈。MRD设置在单台的变压器设备底部,包裹在弹簧线圈中。MRD和位移传感器设置在变压器的底部,加速度传感器设置在变压器外壳上。位移传感器采集变压器的振动位移传送到半主动控制器中,同时速度传感器用来采集振动速度传送到半主动控制器中。此时半主动控制器也将采集来的振动位移和振动加速度信号通过控制电流反馈到MRD上,再通过MRD输出阻尼力实现对变压器的减振。
整个控制系统的布置图如图2所示,MRD布置在变压器的底部。

Figure 2. Semi-active vibration damping system layout
图2. 半主动减振系统布置图
整个变压器减振系统结构框图如图3所示。半主动减振系统一共包括三个部分,分别是变压器模型、半主动控制器和MRD。其中半主动控制器分为开关控制器和模糊开关控制器。
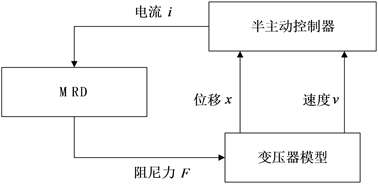
Figure 3. Block diagram of semi-active vibration damping system structure
图3. 半主动减振系统结构框图
3.2. 半主动控制算法设计
半主动控制被认为是通过使用智能阻尼装置减少系统动态响应的有力方法。MRD作为半主动控制设备之一其性能在很大程度上取决于所用的控制算法。迄今为止,研究人员已经开发了各种半主动控制算法,经典的:传统的剪切最优控制策略 [9] 等。简单的控制器:开/关控制器等。以及其他智能控制器:神经网络控制 [10]、小波神经控制 [11]、遗传控制算法 [12] 等。综合考虑本文选取开关控制和模糊控制。
1) 开关控制
本文提出了如式(5)所示的开关控制方式:
(5)
式中: 为变压器静止状态的位移, 为变压器受力时的位移。如果 和 的差和变压器受力时的运动方向一致则输出电流值大于零,而此时开关控制器输出电流值将达到最大。反之小于等于零时,开关控制器输出电流将变为零。本文 选取为0.5A。
2) 改进型模糊开关控制
由于开关控制输出的量只有两种,要么为电流零,要么为电流最大,而模糊控制将输出的量划分为五种,根据输入量的变化而变化,相比于开关控制有更好的连续性。因此,为了实现控制的连续性以及提升系统控制的鲁棒性,将开关控制算法运用到模糊规则中,提出改进型的模糊开关控制。其模糊规则如表2所示。
模糊控制的意义在于,当变压器位移为NB和变压器的速度为NB时,或者,变压器位移为PB和变压器速度为PB时,为最不利状态,也就是振动达到最大的状态,输出的电流为B,即取电流最大;当变压器位移和速度方向不一致,也就是一个为正一个为负时,或者只要其中有一个为零时,输出电流为零。
Table 2. Fuzzy rules
表2. 模糊规则
4. 不同激励作用减振性能对比分析
4.1. 内部电磁力作用
由文献 [13] 得知,绕组内部电磁力为
(6)
式中: 为绕组自激励; 为绕组受迫振动激励; 为绕组固有频率; 为受迫振动频率; 、 分别为初始相位。
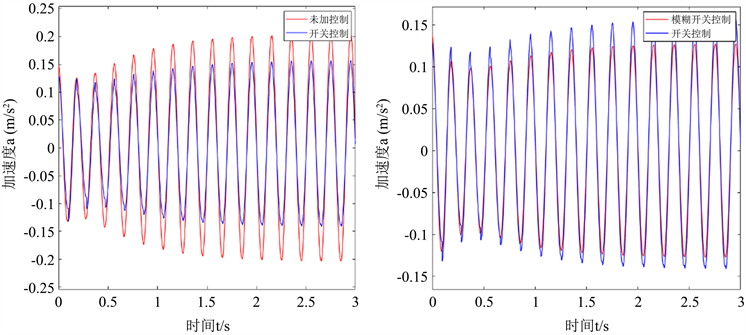
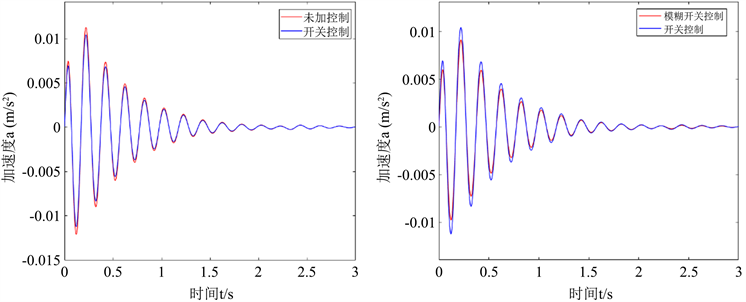
由图4可知,内部电磁力作用振动加速度变化较小,在前0.5 s内,对振动加速度减弱效果较小。而当振动加速度趋于稳定时,此时两种控制效果下都对振动加速度有很明显的减弱,开关控制在未加控制的基础上对振动加速度实现了26%的减弱,而模糊开关控制在开关控制的基础上对振动加速度实现了12%的减弱。
 (a) (b)
(a) (b)
Figure 4. Comparison of vibration acceleration by electromagnetic force
图4. 电磁力作用振动加速度对比图
4.2. 外部激励
1) 地震波激励
本文选取自然记录的地震波来进行计算分析,选取El Centro地震波,El Centro是美国于1940年测得的一组地震波数据。地震加速度时间步长取为0.02 s,地震作用持续时间取10 s,El Centro地震波最大加速度峰值为3.417 m/s2,按要求,调整加速度峰值,以模拟7度时的地震作用力。振动加速度时域响应如图所示。
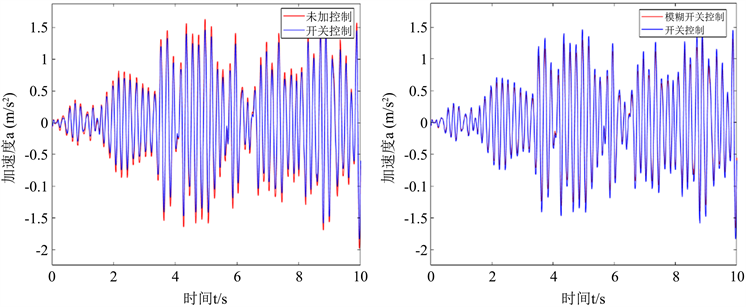
由图5可知,地震波变化较为复杂,同样引起振动加速度复杂变化,对比在两种不同控制效果下的振动加速度,加入开关控制后变压器的振动加速度整体有明显的减弱效果,而模糊开关在开关控制的基础之上进一步实现了对振动加速度的减弱。开关控制和模糊开关控制效果下的振动加速度峰值较未加控制和开关控制分别减少了9%和17%。整个地震波激励作用表现为在振动加速度较大时减弱效果最大,而振动加速度最小时,较弱效果较小。
 (a) (b)
(a) (b)
Figure 5. Comparison of vibration acceleration by seismic wave excitation
图5. 地震波激励作用振动加速度对比图
2) 冲击波激励
用冲击信号作为外部激励,该激励如式所示
(7)
式中: 是该信号的幅值, 是基波频率, 是脉冲刚度,本文中选择 = 2.0 cm, = 10.4 rad/s, = 3。
由于冲击波激励跳跃式变化直至为零,因此能更好反应减振系统受到外部激励时,控制器对外部扰动的减弱效果。由图6可知,冲击波激励作用时开关控制和模糊开关控制对于振动加速度的减弱主要表现在前期加速度变化幅度变化较大的时候,在冲击波激励作用后期,此时振动加速度本身变化较小,直至为零。开关控制和模糊开关控制效果下的振动加速度峰值相比于未加控制和开关控制分别减少了5%和6%。
 (a) (b)
(a) (b)
Figure 6. Comparison of vibration acceleration by shock wave excitation
图6. 冲击波激励作用振动加速度对比图
5. 结论
本文基于MRD的Bouc-wen计算模型建立变压器半主动减振系统,并对MRD的控制算法进行设计,分别在内部和外部激励作用,对两种控制算法的减振性能进行分析。结果表明,改进型模糊开关控制有效的解决了开关控制的不连续性以及提高了控制系统的鲁棒性,在内部激励和外部激励作用,最大实现了对振动加速度26%和17%的减弱。
文章引用
翟凌晨,印心童,葛浩然,张海龙,王恩荣. 基于磁流变阻尼器的变压器半主动减振控制研究
Research on Semi-Active Damping Control of Transformers Based on Magnetorheological Dampers[J]. 电气工程, 2022, 10(02): 95-102. https://doi.org/10.12677/JEE.2022.102011
参考文献
- 1. 付文波. 电力变压器的故障诊断与检修策略[J]. 低碳世界, 2021, 11(11): 35-36.
- 2. Asad, N. and Jinkoo, K. (2021) Seismic Retrofit of 3000 kVA Power Transformer Using Friction Dampers and Prestressed Tendons. Structures, 32, 641-650. https://doi.org/10.1016/j.istruc.2021.03.029
- 3. Fan, X. (2020) Environmental Noise Pollution Control of Substation by Passive Vibration and Acoustic Reduction Strategies. Applied Acoustics, 165, 682-684. https://doi.org/10.1016/j.apacoust.2020.107305
- 4. 孙春平. 室内配电房及变压器结构传声治理研究[D]: [硕士学位论文]. 成都: 西南交通大学, 2013.
- 5. 潘家玮. 浅析变电站变压器的降噪[J]. 高压电器, 2014, 6(1): 6-7.
- 6. 杨龙宇, 高芳清. 基于双层隔振系统理论的隔振地基研究[J]. 四川水泥, 2015, 5(1): 332-333.
- 7. 洪陈玉, 高芳清. 基于四端参数法的小区变压器隔振分析[J]. 工程科学, 2008, 12(2): 3-4.
- 8. 陆昕, 钱帅伟, 韦承志, 等. 配电变压器噪声与振动控制分析[J]. 变压器, 2021, 58(1): 34-38.
- 9. Dyke, S.J., Spencer, B.F. and Sain, M.K. (1996) Modeling and Control of Magnetorheological Dampers for Seismic Response Reduction. Smart Materials and Structures, 5, 565-575. https://doi.org/10.1088/0964-1726/5/5/006
- 10. Wang, D.H. and Liao, W.H. (2005) Modeling and Control of Magnetorheological Fluid Dampers Using Neural Networks. Smart Materials and Structures, 19, 103-119.
- 11. Hashemi, S.M.A. and Kazemi, H.H. (2016) Localized Genetically Optimized Wavelet Neural Network for Semi-Active Control of Buildings Subjected to Earthquake. Structure Control, 32, 29-41. https://doi.org/10.1002/stc.1823
- 12. Yan, G. (2006) Integrated Fuzzy Logic and Genetic Algorithms for Multi-Objective Control of Structures Using MR Dampers. Journal of Sound and Vibration, 296, 368-382. https://doi.org/10.1016/j.jsv.2006.03.011
- 13. 贺小龙, 罗天洪, 伍国果, 等. 多激励条件下高速列车牵引变压器悬挂参数选择研究[J]. 铁道学报, 2020, 42(9): 58-64.