Mechanical Engineering and Technology
Vol.
10
No.
01
(
2021
), Article ID:
40476
,
8
pages
10.12677/MET.2021.101005
基于MATLAB的近似直线机构的解析分析与 实现
李克勤1,姜翠香2
1湖北工业大学机械工程学院,湖北 武汉
2武汉科技大学理学院,湖北 武汉

收稿日期:2020年12月22日;录用日期:2021年1月26日;发布日期:2021年2月22日

摘要
近似直线机构因组成构件少、机构的累积误差小、传动效率高,在冶金工业和轻工业自动化生产线、物流行业的物料垂直搬运与输送中起到很重要的作用。运用解析法、机构学原理来分析该近似直线机构的运动特性,分析了不同尺寸案例并在MATLAB软件平台上实现,为后续的概念设计和方案设计实施提供了便利和基础。
关键词
解析分析,直线机构,运动学分析
Analysis and Implement of an Approximate Straight-Line Mechanism Based on MATLAB
Keqin Li1, Cuixiang Jiang2
1School of Mechanical Engineering, Hubei University of Technology, Wuhan Hubei
2College of Science, Wuhan University of Science & Technology, Wuhan Hubei

Received: Dec. 22nd, 2020; accepted: Jan. 26th, 2021; published: Feb. 22nd, 2021

ABSTRACT
Because of less components, small cumulative error and high transmission efficiency, the approximate straight-line mechanism plays an important role in metallurgy industrial and light industry automatic production line, material vertical handling and transportation in logistics industry. Analytical method and mechanism theory applied to analyze the motion characteristics of the approximate straight-line mechanism. Differential size samples analyzed, implemented by MATLAB, it’s convenient for conceptual and scheme design of project.
Keywords:Analytical Method, Straight-Line Mechanism, Kinematics Analysis

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在平面四杆机构(含曲柄摇杆机构、双摇杆机构)中有一类机构能够实现近似直线运动轨迹,如在港口广泛使用的门座式起重机 [1] [2]、物流行业的垂直上下传递输送物料的装置 [3],在选矿机械的直线筛分机器、冶金企业轧钢系统中的推钢机的机械传动、工业企业的钢材送入加热炉的送料搬运机械系统 [4] [5] [6] 中。
2. 近似直线机构的运动轨迹分析
机构分析方法在过去普遍使用图解法 [4] - [10],随着计算机技术的普及,解析分析法 [2] [11] [12] 得到了广泛应用。图1所示为一近似直线机构,它由曲柄 、连杆 、摇杆 和机架 组成,在满足一定的条件下,连杆 的延长线的D点可得到近似直线运动轨迹。
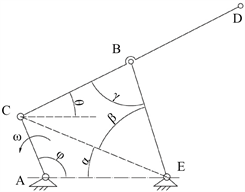 α为铰点C和铰点E的连线CE与机架的夹角;β为连线CE与摇杆
的夹角;γ为连杆
与摇杆
的夹角,此即为该机构的传动角;θ为连杆
(包含其延长线
)与水平线的夹角;φ为曲柄
与机架
的夹角(逆时针为正);
为曲柄
的长度;
为连杆
的长度;
为摇杆
的长度;
为机架
的长度;
为连杆
延长线的长度。
α为铰点C和铰点E的连线CE与机架的夹角;β为连线CE与摇杆
的夹角;γ为连杆
与摇杆
的夹角,此即为该机构的传动角;θ为连杆
(包含其延长线
)与水平线的夹角;φ为曲柄
与机架
的夹角(逆时针为正);
为曲柄
的长度;
为连杆
的长度;
为摇杆
的长度;
为机架
的长度;
为连杆
延长线的长度。
Figure 1. Geometrical relationship of approximate straight-line mechanism
图1. 近似直线机构的几何关系图
为了得到D点的运动轨迹,分二种情况讨论:
(1) 曲柄 在0˚~180˚范围内
因曲柄 可在360˚范围活动,摇杆 只在有限范围内摆动,四边形AEBC的构型也会发生很大的变化。
此时,在图1中连接铰点C和铰点E,由余弦定理可求解得连线CE的长度 :
(1)
式中:φ为曲柄 的转动角(输入角)。
由三角形△ACE,据余弦定理可求得α角:
(2)
再据三角形△CBE,由余弦定理可求得β角:
(3)
同理,可求得该直线机构的传动角γ:
(4)
传动角γ能很好地说明该水平直线机构的传动特性。
连杆 (包含其延长线 )与水平线的夹角θ可由式(5)求得。
(5)
所以,点D的轨迹方程即得。
(6)
(2) 曲柄 在180˚~360˚范围内
当曲柄 在180˚~360˚活动时,四边形AEBC的构型变化了,所以其几何关系发生了较大的变化,见图2所示。

Figure 2. Schematic geometrical relationship of approximate straight-line mechanism
图2. 近似直线机构的几何关系示意图
由图2可知,此时的夹角θ应该由式(7)求解得到。
(7)
点D的轨迹方程也有变化,可由式(8)得到。
(8)
3. 摇杆 的摆角分析
摇杆 虽然只在有限范围内摆动,但其摆动角 (与水平线的夹角,逆时针为正)关系式:
(1) φ在0˚~180˚时
(9)
(2) φ在180˚~360˚时
(10)
4. 案例分析
分析案例1。据文献 [3]、 [5] 的信息有: ; 。为便于在MATLAB软件平台上编程实现,为方便分析,取 单位量,表1为分析计算的结论,其轨迹输出可见图3和图4,图5为其摆角变化,图6为该直线机构的传动角变化。
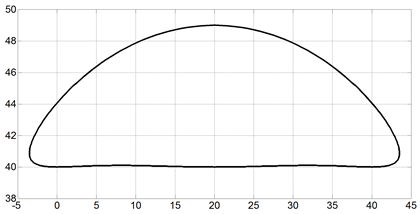
Figure 3. Motion curve of point D ( )
图3. D点的轨迹图(φ在0˚~360˚变化)
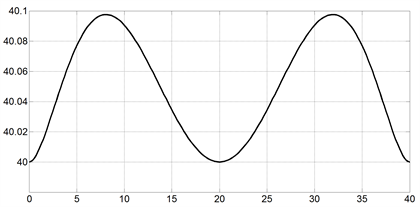
Figure 4. Motion curve of point D ( )
图4. D点的轨迹图(直线段,φ在90˚~270˚变化)

Table 1. Results of analysis on two cases
表1. 案例分析的结论
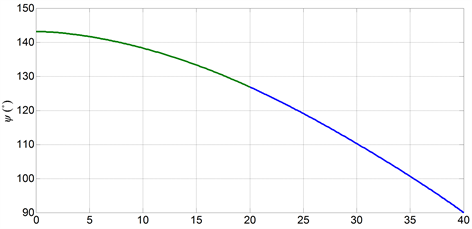
Figure 5. Result of swing angle ψ of rocker
图5. 摇杆 的摆角ψ输出图

Figure 6. Result of transmission angle
图6. 传动角输出图
分析案例2。据文献 [6],其已知数据有: ; 。为便于比较,同样地,取 单位量。其输出结论如表1和图7~9所示。
二个案例分析表明:
在同样的曲柄活动范围(即φ在90˚~270˚变化),比较图4和图7,其D点的输出直线段的有效区间:案例1的直线段长为40单位,案例1的垂直方向差值为0.0975单位,相对差值(垂直方向差值/直线段)0.002438;案例2的直线段长度为46.4758单位,垂直方向差值为0.4317单位,相对差值(垂直方向差值/直线段)为0.002648;显然,案例1比案例2的要好。要保持较好的直线度值,案例2的活动区间就必须缩小。
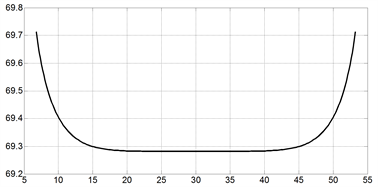
Figure 7. Motion curve of point D ( )
图7. D点的轨迹图(直线段,φ在90˚~270˚变化)
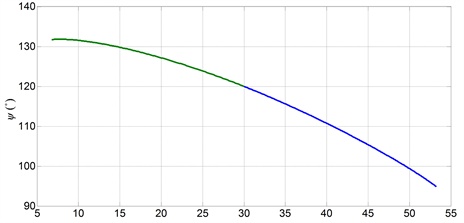
Figure 8. Result of swing angle ψ of rocker
图8. 摇杆 的摆角ψ输出图

Figure 9. Result of transmission angle
图9. 传动角输出图
5. 结论
运用解析分析的方法对近似直线机构进行了运动学分析,得到了该近似直线机构的运动轨迹方程、传动角、摆角等重要的信息,为具体的机构选型与设计打下了扎实基础,方便项目的概念设计和方案设计实施。
(1) 在同样的曲柄活动范围(即φ在90˚~270˚变化),案例1的直线段长的区段比案例2的要大一些;案例1比案例2的要好。
(2) 摇杆 的摆角输出,随尺寸的增大而输出相应的变小;案例1优于案例2。
(3) 传动角的变化趋势也是随尺寸增大而输出变小,这说明案例1的传动性能更佳。
(4) 案例1的综合性能比案例2更好,直线度更好一些,直线段的区域更大。
文章引用
李克勤,姜翠香. 基于MATLAB的近似直线机构的解析分析与实现
Analysis and Implement of an Approximate Straight-Line Mechanism Based on MATLAB[J]. 机械工程与技术, 2021, 10(01): 44-51. https://doi.org/10.12677/MET.2021.101005
参考文献
- 1. 倪庆兴, 王焕勇. 起重机械[M]. 上海: 上海交通大学出版社, 1990.
- 2. 李克勤. 具有近似水平直线运动轨迹双摇杆变幅机构的运动学分析与计算[J]. 港口装卸, 2002(2): 5-7.
- 3. 陈国华. 机械机构及应用[M]. 第2版. 北京: 机械工业出版社, 2013.
- 4. 杨黎明, 杨志勤. 机构选型与运动设计[M]. 北京: 国防工业出版社, 2007.
- 5. Ullman, D.G. (2010) The Mechanical Process. 4th Edition, The McGraw-Hill Companies, Inc., New York.
- 6. 黄锡恺, 郑文纬. 机械原理[M]. 第6版. 北京: 高等教育出版社, 1989.
- 7. 曹惟庆, 徐曾荫. 机构设计[M]. 第2版. 北京: 机械工业出版社, 1999.
- 8. 杨基厚. 机构运动学与动力学[M]. 北京: 机械工业出版社, 1987.
- 9. 李琦, 李华英. 平面连杆机构连杆曲线的直线近似度研究[J]. 轻工机械, 2003(2): 39-41.
- 10. 王忠, 朱洪俊, 廖磊, 等. 瞬心无穷远时近似直线轨迹的四杆机构综合[J]. 机械工程学报, 2007(10): 46-49.
- 11. 钱卫香, 韩建友. 特殊位形下近似直线轨迹连杆机构综合[J]. 机械设计与研究, 2007(3): 40-43.
- 12. Dijksman, E.A. and Smals, A.T.J.M. (1996) λ-Formed 4-bar Linkages Set in a Translation-Position to Design Mechanisms Approximating a Straight Line. Mechanism and Machine Theory, 31, 1033-1042. https://doi.org/10.1016/0094-114X(96)84596-4
附录:程序代码
% MATLAB 实现程序
% AC为曲柄(主动件,φ为输入角)
% C、B、D在一条直线上;机架为AE;摇杆为EB
% CB=EB=BD=2.5*AC;AE=2*AC
%求D点的轨迹
clc;
AC=10;
CB=2.5.*AC;
EB=2.5.*AC;
BD=2.5.*AC;
AE=2.*AC;
phia=[0:2:180]*pi/180; %曲柄输入角在0到180°时
CE=sqrt(AC.*AC+AE.*AE-2.*AC.*AE*cos(phia)); %计算CE长度
alph=acos((CE.*CE+AE.*AE-AC.*AC)./(2.*CE.*AE)); %α
beta=acos((CE.*CE+EB.*EB-CB.*CB)./(2.*CE.*EB)); %β
gama =acos((CB.*CB+EB.*EB-CE.*CE)./(2.*CB.*EB)); %γ传动角
sita=pi-(alph+beta)-gama;
gama11= gama*180/pi;
baijiao=(pi-(alph+beta))*180/pi;%摇杆的摆角输出(°)
xd1=AC.*cos(phia)+(CB+BD).*cos(sita); %D点的横坐标
yd1=AC.*sin(phia)+(CB+BD).*sin(sita); %D点的纵坐标
phia1=[180:2:360]*pi/180; %当曲柄输入角在180°到360°时
CE1=sqrt(AC.*AC+AE.*AE-2.*AC.*AE*cos(2.*pi-phia1)); %计算CE长度
alph1=acos((CE1.*CE1+AE.*AE-AC.*AC)./(2.*CE1.*AE)); %α
beta1=acos((CE1.*CE1+EB.*EB-CB.*CB)./(2.*CE1.*EB)); %β
gama1=acos((CB.*CB+EB.*EB-CE1.*CE1)./(2.*CB.*EB)); %γ传动角
sita1=pi-(beta1-alph1)-gama1; %注意:几何关系变化
gama11= gama1*180/pi;
baijiao1=(pi-( beta1-alph1))*180/pi; %摇杆的摆角输出(°)
xd2=AE-EB.*cos(beta1-alph1)+BD.*cos(sita1); %D点的横坐标
yd2=EB.*sin(beta1-alph1)+BD.*sin(sita1); %D点的纵坐标
plot(xd1,yd1,xd2,yd2)%绘制轨迹图
grid