Mechanical Engineering and Technology
Vol.
11
No.
05
(
2022
), Article ID:
56464
,
8
pages
10.12677/MET.2022.115055
多功能智能座椅的设计与仿真
陈子杰,肖启巡,黄景德*
珠海科技学院机械工程学院,广东 珠海
收稿日期:2022年8月22日;录用日期:2022年9月23日;发布日期:2022年9月30日

摘要
针对目前市场上的智能座椅功能单一,无法满足广大群体多功能使用需求的问题,设计了一种多功能座椅。首先在研究主体装置与各部分功能结构工作原理的基础上,结合人体工程学分析设计了按摩装置、辅助站立装置;其次为使座椅更加智能化,设计了清扫装置与遥控装置;最后运用UG建立了多功能智能座椅三维模型,并对其进行了有限元分析与功能仿真。该型多功能智能座椅既能按摩放松身体,又能辅助生活便利,同时也能实现清扫保障工作,可以有效提高人们的生活质量,对家居装备智能化的发展也将起到积极作用。
关键词
智能座椅,多功能,结构设计,运动仿真

Design and Simulation of Multifunctional Intelligent Seat
Zijie Chen, Qixun Xiao, Jingde Huang*
School of Mechanical Engineering, Zhuhai College of Science and Technology, Zhuhai Guangdong
Received: Aug. 22nd, 2022; accepted: Sep. 23rd, 2022; published: Sep. 30th, 2022

ABSTRACT
Aiming at the problem that the intelligent seat in the market has a single function and cannot meet the multi-functional needs of the masses, a multi-functional seat is designed. First of all, on the basis of studying the main device and the functional structure and working principle of each part, the massage device and auxiliary standing device are designed in combination with ergonomic analysis; Secondly, in order to make the seat more intelligent, the cleaning device and remote control device are designed; At last, the three-dimensional model of multi-functional intelligent seat is established by UG, and the finite element analysis and functional simulation are carried out. This type of multi-functional intelligent seat can not only massage and relax the body, but also assist the convenience of life. At the same time, it can also achieve cleaning and guarantee work, which can effectively improve people’s quality of life and play a positive role in the development of intelligent household equipment.
Keywords:Intelligent Seat, Multifunctional, Structural Design, Motion Simulation

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着科学技术的飞速发展,越来越多的智能化产品走进人们的生活,带给大家更好的使用体验。目前市场上的智能座椅受到广大群体的青睐,多数用户在忙碌工作后渴望得到更加便捷的放松,选择购买智能按摩座椅。根据调查研究显示,市场上的大部分座椅的功能单一,多数只能实现按摩功能,不能更好的满足不同人群的使用需求。为使人们更好的享受到科技创新带来的便携,功能一体化、智能化已是未来座椅产业发展的必然趋势。基于上述背景,我们深入分析用户需求,研究设计了一种具备多功能的智能化座椅,该研究综合利用数学模型分析、人体工程学分析等知识结合目前高端的座椅系统、人机交互系统、传感系统等,重点探索了智能座椅的结构和控制技术等关键问题,形成了可行性方案。
2. 多功能智能座椅整体结构
科学技术是现今经济和社会发展的主要推动力量,科技革命对人们的生活方式产生了巨大的影响 [1]。在现代科技型社会中,一体化扮演着越来越重要的角色。多功能智能椅是集按摩、爬梯、清扫、辅助站立等功能的一体化智能座椅。我们在进行多功能智能座椅机构设计时,充分考虑了使用者的需求,结合人体工程学对结构进行了初始优化。采用交互式CAD/CAM系统(Unigraphics NX, UG)建立了三维模型,如图1所示。

Figure 1. Structure model of multifunctional intelligent seat
图1. 多功能智能座椅结构模型
从上图中可以看出,该座椅采用菱形履带底盘确保其稳定性,各部件合理组合实现了头枕高度调整、椅背调整、扶手调整等基础功能。为了满足不同用户的使用需求,添加了按摩、辅助站立、清扫、遥控等功能模块。
3. 菱形履带结构设计
3.1. 菱形履带结构原理
国家标准建议的楼梯宽度为300 mm,高度为160 mm,为保证智能座椅在上下楼梯时具有更高的平稳性,我们将座椅底盘设计为菱形履带式。履带底盘相对于轮式底盘具有接地比压小、通过性强等特点 [2],主要由导向轮、支重轮、支架、驱动轮和双向锁紧装置等部件组成。各部件与传感系统、减震系统等互相联合作用,可实现普遍的上下楼梯功能。底盘尺寸为800 mm × 680 mm,菱形履带结构如图2所示。

Figure 2. Schematic diagram of diamond crawler structure
图2. 菱形履带结构示意图
上楼梯时,当履带前脚接触到楼梯上角时,发动机动力系统会稍微增大动力,同时座椅将通过减震系统的平衡弹簧来调节履带的角度和加强座椅的平稳度;当履带全部与楼梯接触时,发动机将会以恒定的驱动来带动座椅,从而完成上楼梯过程;下楼梯时,当传感器检测到到达楼梯时,发动机动力系统将会在减少动力的同时加强双向锁紧装置,当履带完全与楼梯接触时,锁紧装置保持恒定,直到完成下楼梯过程。
3.2. 菱形履带平稳性及通过性分析
座椅在上下楼梯时需保证其稳定性和安全性,运用物理学对座椅上下楼梯的状态进行受力分析 [3]。为了分析简便,我们对模型图进行简化,菱形履带上下楼梯运行时的受力分析分别如图3、图4所示。
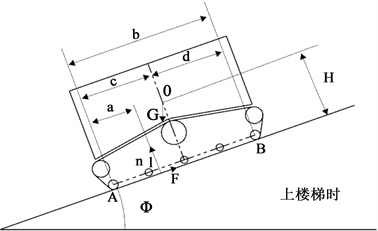
Figure 3. Schematic diagram of stress analysis of stairs
图3. 上楼梯受力分析示意图

Figure 4. Schematic diagram of stress analysis of lower stairs
图4. 下楼梯受力分析示意图
其中,a为履带轮A与支持力n1间的距离;b为履带与地面接触的长度; 分别为履带前轮和后轮与座椅质心位置的横向距离; 为楼梯的坡度;n1,n2分别为地面对履带底盘的支持力;F为地面与履带间的摩擦力。
履带在上楼梯时,整个座椅受力平衡,对履带轮A列力矩方程可得
(1)
因为座椅受力平衡,所以在垂直于楼梯坡度方向上的合力为零,即 ,代入式(1)可得
(2)
当楼梯坡度 超过某个限定的数值时,座椅将要发生倾翻,所以座椅发生倾翻的临界条件为a = 0,即
(3)
则上楼梯时可承受最大坡度角为
(4)
同理,下楼梯时可承受最大坡度角为
(5)
目前普遍楼梯坡度在30˚以内,由(4)、(5)式可知座椅使用履带底盘的倾翻的临界条件大于30˚,所以座椅在上下楼梯时能确保不倾翻。
4. 辅助功能模块设计
4.1. 按摩模块设计
根据人体背部结构图,设计按摩装置的大小和合适的结构距离来保证在使用过程中按摩到人体合适的部位。按摩装置如图5所示,主要由V型支架、乳胶滚轮、万向球杆、运动导轨等组成,V型支架采用性能较好的不锈钢,乳胶滚轮采用天然乳胶来提炼,通过人工技术的整合使其软度和性能达到用户按摩舒适度的要求。综合分析我们将背靠设计为“S”型,凹凸有理,充分和人体的腰部贴合,考虑使用者的背部有大量的汗腺,对座椅的材料有很大的考验,我们采用天然橡胶来做背椅表面的材料,即可耐汗也方便清洁,内部采用PPC软胶结合,即可提供弹性也可为滚轮提供韧性 [4]。

Figure 5. Schematic diagram of human body structure and massage device
图5. 人体结构与按摩装置示意图
按摩功能主要分为肩部按摩和腰部按摩。当使用者需要按摩肩膀时,V型支架在导轨的引领到达位置1,万向球体杆进行纵向抖动10秒后进行横向抖动从而达到较好的肩部按摩效果体验。如上图所示,轨道2是参考了人体肌肉组织与按摩师的按摩手法进行合理设计的按摩路线。当使用者进行腰部按摩时,V型支架沿着轨道2来回缓慢的移动5圈后,在移动的同时万向球体杆进行横向往外来回摆动,实现腰部按摩功能。
4.2. 辅助站立模块设计
目前市面上的座椅很少有辅助站立的功能,辅助站立,即座椅可以实现上下伸缩调整高度,便于使用者起身,其运动模型简化过程如图6所示。拥有辅助站立结构的座椅成熟度较低,有着较大的发展空间。研究基于人体学,参照人体尺寸分析出站立时座位的角度和高度,综合各个因素验证,设计出辅助站立模块。

Figure 6. Schematic diagram of auxiliary standing module
图6. 辅助站立模块示意图
考虑到座椅的舒适性和安全性,辅助站立结构采用由液压系统,液压系统由液压油、液压缸、电磁换向阀、双向液压锁等组成。液压系统运行过程如图7所示。

Figure 7. Structural diagram of hydraulic system
图7. 液压系统结构示意图
当座位需要升起时,电磁换向阀3右位得电,高压油从B进入,到液控单向阀2经B’到达液压缸的下端,同时高压油也把液控单向阀1打开,液压缸上端的液压油经液控单向阀1从A回到油箱从而完成座位上升过程,如图(a)所示。同理,当座位下降时,电磁换向阀3左位得电,高压油从A进入,到液控单向阀1经A’到达液压缸的上端,同时高压油也把液控单向阀2打开,液压缸下端的液压油经液控单向阀2从B回到油箱从而完成座位下降过程,如图(b)所示。考虑到当座位停留在半空中时,电磁换向阀处于中位,如果长时间停留,液压油有可能出现流油现象,从而会产生意外事故发生。基于此,我们对系统进行优化,采用双向液压锁,液控单向阀2的液压油由油缸下腔引入,此时下腔为低压,单向阀2在上腔高压作用下紧紧关闭,保证无泄漏,座位不会下降。当需要下降时,换向阀左位接入,油液由A口经单向阀1进入油缸下腔,由这一油路引出的油使单向阀2强制打开,油缸上腔的液压油反向流过单向阀2经B口流回油箱,座位下降。
4.3. 清扫模块设计
目前市场上的智能座椅产品功能单一化,清扫功能的加入给该装置增添了重要的地位,但也给设计者带来一定的挑战。目前面临的困难是在座椅上安装清扫装置所留下的空间很少,打扫的范围有限,针对此类情况,论文设计了清扫装置,如图8所示。

Figure 8. Schematic diagram of cleaning structure
图8. 清扫结构示意图
清扫结构主要由升降台、旋转扫把、移动滚轮、吸尘器、刀型软胶铲等组成。采用升降台的目的是,当使用清扫功能时,清扫装置会从座位底下降下直到轮子与地面接触,把整个座椅被抬起,旋转扫把降下往外延伸大范围的清扫到地面。当完成清扫时,升降台缩回到原来的位置,防止影响到上下楼功能。清洁时采用旋转扫把逆向转动产生螺旋效应,使灰尘从两旋转扫把间流动,同时吸尘器在一端把灰尘吸进垃圾袋,从而完成清扫功能。考虑到粘在地面的东西很难清洁,我们运用平衡式的摇杆结构,采用刀型软胶,通过平衡力传递,使刀型软胶在地面上来回铲动,达到清洁效果。
4.4. 遥感系统设计
控制器是整个座椅的“大脑”,该结构参考普遍人体的手结构的参数设计的遥控方向杆,使用者的手腕不会在长时间使用而感到有累痹。遥控操作界面主要有8个功能按钮分别是:显示屏、上楼梯、下楼梯、紧急呼叫、总开关、按摩1、按摩2、方向控制杆。遥感系统结构如图9所示。

Figure 9. Structure diagram of remote control system
图9. 遥控系统结构示意图
5. 运动过程仿真分析
考虑多功能智能座椅相较于传统智能座椅,其清扫模块等辅助系统必然会导致整个座椅重量增加,为确保系统承重要求,测试结构设计的有效性,我们针对重要部件做了运动仿真。具体步骤如下:
• 建立智能懒人椅三维模型并装配好。
• 将座椅模型导入UG进行仿真测试。
• 对仿真的结构进行改进和优化。
• 对主要受力部件进行有限元分析。
• 对优化的模型进行渲染、出动画效果。
典型部件有限元分析结果如图10所示。
仿真结果显示,关键部件受力分析与预期效果一致,该型智能座椅符合工程学的具体设计标准,可以实现所设计的功能。
6. 结论
针对当前市场主流座椅存在的功能、价格、安全性、智能化等问题,与人们想要的产品尚有一定的差距,在融合人体工程学、机构设计原理学的基础上,设计了一种多功能智能椅,通过UG软件构建了三维模型,对重要受力部件进行了有限元分析,同时对模型运动过程进行了仿真验证。随着人工智能

Figure 10. Schematic diagram of finite element analysis of typical parts
图10. 典型零件有限元分析示意图
技术的进一步发展,人们更能体验到座椅智能化人机交互体验,智能座椅有望成为受各大群体欢迎的创新型家用产品,对服务行业起到促进的作用,具有巨大的市场潜在价值。
基金项目
本文得到了广东省教育厅重点项目(2020ZDZX2032)、广东省大学生创业实践项目(S202113684014S、S202113684015S)资助。
文章引用
陈子杰,肖启巡,黄景德. 多功能智能座椅的设计与仿真
Design and Simulation of Multifunctional Intelligent Seat[J]. 机械工程与技术, 2022, 11(05): 479-486. https://doi.org/10.12677/MET.2022.115055
参考文献
- 1. 李六军. 现代科学技术背景下人的全面发展研究[D]: [硕士学位论文]. 延安: 延安大学, 2009.
- 2. 韩振浩, 朱立成, 苑严伟, 赵博, 方宪法, 张天赋. 山地果园履带底盘坡地通过性能分析与优化设计[J]. 农业机械学报, 2022, 53(5): 413-421+448.
- 3. 吉旭, 唐勇, 林蜀云, 张德俊, 张太华, 徐卫平. 山地履带自走式辣椒收获机底盘动力学仿真与试验[J]. 中国农机化学报, 2022, 43(7): 72-80.
- 4. 谢涛, 黄鸿. 按摩机器人的结构设计及运动学仿真[J]. 现代制造工程, 2007(7): 105-107.
NOTES
*通讯作者。