Transmission and Distribution Engineering and Technology
Vol.
08
No.
02
(
2019
), Article ID:
31095
,
8
pages
10.12677/TDET.2019.82010
Development of Installation and Maintenance Robot on Power Lines for Spacer Bar
Sicheng Chen, Weiyu Yan, Hanming Guo, Jinming Li, Linpu Li, Quan Liang
College of Mechanical Engineering, Shenyang University of Technology, Shenyang Liaoning

Received: Jun. 2nd, 2019; accepted: Jun. 21st, 2019; published: Jun. 28th, 2019

ABSTRACT
The operation and maintenance of transmission lines is a very important work. Based on the traditional overhaul flying car of power transmission and transformation, we have studied a new working tool—the installation and overhaul robot of transmission and transformation spacer bar. This paper introduces the key technologies of the robot, such as installation of spacer bar, automation scheme of obstacle-surmounting function of vehicle body, mechanical structure design of the robot, and control system of the robot. The simulation test, as a result of SolidWorks virtual simulation environment (SolidWorks Motion module) shows that the robot can achieve the expected functions. It has a good application value for the future research and development of similar products.
Keywords:Power Transmission and Transformation, Installation and Maintenance Robot, Installation of the Spacer Rod
输变电间隔棒安装检修机器人的研制
陈思成,闫炜煜,郭翰铭,李金明,李林蒲,梁全
沈阳工业大学,机械工程学院,辽宁 沈阳
收稿日期:2019年6月2日;录用日期:2019年6月21日;发布日期:2019年6月28日

摘 要
输变电线路的运维是一件非常重要的工作。我们基于传统输变电检修飞车研究了一项新的工作工具——输变电间隔棒安装检修机器人。文章介绍了机器人安装间隔棒、车体越障功能的自动化方案,机器人的机械结构设计,以及机器人的控制系统等关键技术。在SolidWorks的虚拟仿真环境(SolidWorks的Motion模块)中的仿真测试结果表明机器人能实现预期的功能。对以后类似产品的研发具有比较好的应用价值。
关键词 :输变电,检修机器人,间隔棒安装

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着自动化的发展,机器人的种类越来越多,许多复杂而又危险的工作逐渐由机器人完成,这不仅保证了人员的安全、降低了成本,而且还提高了工作效率。高压输电线路的检修和间隔棒的安装就是一项危险且耗时的工作,目前国内已经开始对高压输电线巡线机器人进行研究,并且取得了不小的进展,基本可以实现自动化巡线,但是间隔棒安装方面的研究相对较少,同时国内大多数还采用传统飞车进行间隔棒的安装和输电线路的检查。传统飞车相较于机器人来说有许多弊端:由于传统飞车整体相对较大,上下线相对困难;传统飞车不能够自动安装间隔棒,需要通过人力进行间隔棒的安装;传统飞车整体质量较大,跨越障碍物相对困难;传统间隔棒安装也相对复杂。本文将介绍一种用于高压线路检修及自动安装间隔棒的机器人的研制,该机器人通过改变重心的方式来越障,并配合配套的新式间隔棒,实现快速、自动安装间隔棒的目的,不仅减轻了工人的工作量,而且还降低了高空作业的危险,安全高效。
2. 介绍
目前安装相间间隔棒的方法主要有人工飞车安装(图1)和飞机辅助安装(图2) [1] ,飞机辅助安装经济成本太高而人工安装则费时费力,为了解决这些问题,本文将介绍一种用于高压输电线路自动安装相间间隔棒的第一阶段的输变电间隔棒安装检修机器人的研制过程和它的基本概念。

Figure 1. Artificial installation by traditional flying car
图1. 人工飞车安装

Figure 2. Aircraft auxiliary installation
图2. 飞机辅助安装
3. 检查输电线路
高压架空输电线路的塔间距离通常在300~500米。机器人装有测距装置,以确安装保隔离板间距离的准确性。由于每次把机器人安装到输电线路上有一定难度,为了避免多次安装,它装有自动越障装置,这样可以提高效率。
检查线路方法:机器人检测电路作为视觉检测的代替,通过其上面安装的红外线等传感器可以成像,通过分析数据来检查输电线路是否完好。机器人检测电路有以下优点:检测结果准确、检测效率提高、检测成本大幅降低、安全系数提高。在塔之间的跨度中,为了保持电缆之间的距离,在风吹的时候避免他们互相接触,需要架设间隔棒。因此间隔棒装置也需要不时的检查。机器人在高空检测时经常受到悬挂钳、间隔棒以及高压塔的影响。为了克服这种距离地面几十米的障碍,机器人需要高度的机动性和可靠性。它的电瓶等装置安装在有轨道的架子上,通过滑动架子可以改变重心,此外它有可以旋转的机械手臂,可以实现越障,大多数情况下,为跨越间隔棒。
现有技术的共同点,机器人在地线上移动,地线在传输线之上几米,支撑在塔的顶部。若对传输线进行详尽的检查将需要强大的摄像机和特殊的控制方法。我们的机器人可以在输电线路上行走,避免了之前作品的难题,并且可以获得更准确的数据。
4. 自动化建议
1) 基本概念
在我们上一代载人飞车的基础上,我们设计了一种自动化机器人来弥补安全性以及效率问题。另外,我们还设想让它在实现巡检越障的功能之外还能够自动安装间隔棒。我们决定通过调整机器人的重心来实现机器人的移动与越障。整体结构如图(图3)。
本设计主要实现输变电检修的自动化以及跨越障碍的自动化,并可以通过系统控制自动安装隔离棒。
第一部主要是通过电机使飞车实现运动,第二部通过调节重心的方式让飞车左右翘起实现跨越障碍的目的,第三部通过Arduino控制隔离棒的安装。
2) 间隔棒的自动安装
机器人随身携带多个间隔棒,通过控制电路来控制定位停车并安装间隔棒。机器人中间有一根横向的丝杠,通过步进电机来控制丝杠的转动,进而进给丝杠上携带的间隔棒。间隔棒四个抓手与棒身连接处有扭簧,使得间隔棒脱离机器人后在扭弹力作用下迅速卡在导线之间,完成安装(图4)。为此,我们专门设计了专用的间隔棒。

Figure 3. Overall structure
图3. 整体结构

Figure 4. Complete installation
图4. 完成安装
3) 车体越障
机器人前后有两组运动单元。越障时,安装间隔棒的机构首先通过滑轨移动到电缆下方,以保证不与障碍相撞。让重心后移,前运动单元随着重心的缓慢后移慢慢翘起(图5),翘起之后,在步进电机的控制下旋转一定角度使轴与滑轮能顺利越过障碍(图6),在后运动单元提供的推力下,整体向前移动,前运动单元完全越过障碍后,通过重心的调整,前运动单元的滑轮恢复与电缆的接触,此时,障碍物位于前后两运动单元之间(图7)。后运动单元以同样的方法完成越障,结果如(图8)所示。
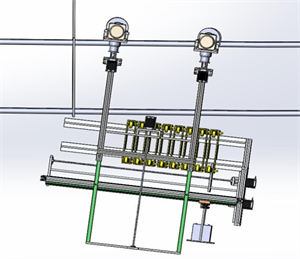
Figure 5. Pre-motion unit preparation for obstacle surmounting
图5. 前运动单元准备越障

Figure 6. Overcoming obstacles smoothly
图6. 顺利越障

Figure 7. Pre-motion unit completes obstacle surmounting
图7. 前运动单元完成越障

Figure 8. Overall overcoming obstacles
图8. 整体越过障碍
5. 机械结构设计
1) 运动单元
运动单元由两个轴组成,每个轴有两个滑轮。在一个滑轮轴中嵌入一个直流电动机,然后将扭矩传递给另一个滑轮(图9)。
机器人的每一个杆都是由铝管制成,减轻车身的重量。
2) 底部结构和配重
机器人驱动机的底座与垂直升降杆相连,通过步进电机和丝杠控制底座的上下移动,进而可以通过间隔棒(图10)。
配重是由间隔棒安装架、间隔棒、电池组成。保证整体质量可以让机器人执行越障的动作。
底座上通过滑轨连接间隔棒安装架,通过一个步进电机和丝杠结构控制间隔棒安装架的前后移动,进而可以调整机器人的重心,从而达到越障的目的(图11)。每一个驱动机都配有一个编码器,以保证机器人的动作都是已知的。通过编码器的数值,执行一组复杂的运动是可行的,如越障模式。

Figure 9. Motion unit
图9. 运动单元

Figure 10. Bottom structure
图10. 底部结构

Figure 11. Counterweight and bottom structure
图11. 配重及底部结构
3) 间隔棒
间隔棒采用复合材料,既可以满足其强度要求又可以减轻质量。间隔棒由四个连接爪和间隔棒主体组成,结构简单,连接爪和间隔棒主体连接并且可以活动,通过弹簧提供动力,连接爪在脱离间隔棒安装架时可以固定在输电线上,减少操作步骤,方便安装和拆卸(图12)。

Figure 12. Spacer bar
图12. 隔离棒
6. 检测机器人–控制系统
检测机器人的控制系统是半自动的,操作者只需要确认模式,就可以完成复杂动作,而不需要将机械手和垂直杆传动到预定位置。然而,由于环境的多变和不同的间隔和障碍,整个过程完全的自动化,在现阶段是无法实现的。
下面的小节描述了检测机器人的控制方法。
1) 电机控制
电机控制是基于Arduino开发板实现的。Arduino开发板连接直流电机电路板控制模块(图13)实现直流电机的启动,正反转及调速。Arduino开发板连接步进电机电路板的控制模块(图14),发送使能信号,方向信号和脉冲信号来对步进电机进行控制。
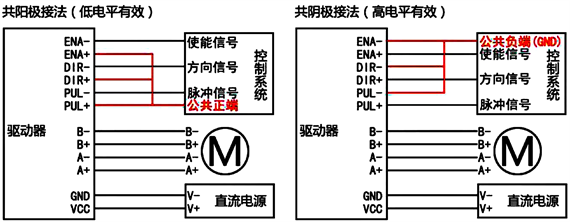
Figure 13. Arduino development board connecting DC Motor circuit board control module
图13. Arduino开发板连接直流电机电路板控制模块

Figure 14. Arduino development board
图14. Arduino开发板
2) 无线通信
通信是通过Arduino开发板连接HC-06蓝牙模块(图15)进行远程控制。

Figure 15. HC-06 bluetooth module
图15. HC-06蓝牙模块
7. 总结
我们通过前文的介绍的内容,我们完成了实物的制作(图16),并最终完成了整机的设计。在SolidWorks的虚拟仿真环境中(SolidWorks的Motion模块),对机器人的越障能力进行了仿真测试,测试的结果表明,我们的设计能够顺利安装间隔棒,并在变形后顺利实现越障功能。

Figure 16. Flying car material object
图16. 飞车实物
基金项目
2018年沈阳工业大学大学生创新创业项目,编号:201810142024。
文章引用
陈思成,闫炜煜,郭翰铭,李金明,李林蒲,梁 全. 输变电间隔棒安装检修机器人的研制
Development of Installation and Maintenance Robot on Power Lines for Spacer Bar[J]. 输配电工程与技术, 2019, 08(02): 81-88. https://doi.org/10.12677/TDET.2019.82010
参考文献
- 1. 谢慧敏, 等. 武汉超高压线路上首次实现直升机带电作业[N]. 湖北日报, 2018-04-13.