Advances in Applied Mathematics
Vol.
10
No.
07
(
2021
), Article ID:
43771
,
13
pages
10.12677/AAM.2021.107239
车–车互联下多前车速度差的跟驰模型
李良鹏*,化存才#
云南师范大学数学学院,云南 昆明

收稿日期:2021年6月7日;录用日期:2021年6月28日;发布日期:2021年7月9日

摘要
基于多前车速度差跟驰模型(MCF),考虑在车联网环境下,车辆安装V2V设备后可提前时间获得多前车的速度信息,提出了一种改进的多前车速度差模型(MCF-CT)。首先,通过线性稳定性分析得到该模型的稳定性条件,发现随着多前车数量m和提前时间t0的增大,交通流的稳定区域面积明显扩大,其占比增加至89.03% (m = 3, t0 = 0.75 s)。其次,通过约化摄动方法导出了密度波方程——Burgers方程、mKdv方程,并给出Burgers的孤波解,mKdv方程的扭结—反扭结波解;最后,通过对MCF-CT模型和全速度差模型(FVD)在车间距减少5 m的紧急情况下的数值模拟,发现当MCF-CT模型中的m = 3,t0 = 0.3 s时,可以避免车辆碰撞的发生。
关键词
跟驰模型,Burgers方程,mKdv方程,数值模拟

A Car-Following Model of the Velocity Difference of Multiple Front Vehicles Considering Vehicle-Vehicle Internet
Liangpeng Li*, Cuncai Hua#
School of Mathematics, Yunnan Normal University, Kunming Yunnan

Received: Jun. 7th, 2021; accepted: Jun. 28th, 2021; published: Jul. 9th, 2021

ABSTRACT
Based on the multiple front vehicle velocity difference car-following model (MCF), and by considering that the velocity information of multi front vehicles can be obtained t0 time in advance after the vehicle is installed with V2V equipment under the environment of Internet of vehicles, an improved multiple front vehicle velocity difference model (named MCF-CT) is proposed. Firstly, the stability condition of the model is obtained by linear stability analysis. It is found that the area of the stable region enlarges obviously as number m of vehicles and the advanced time t0 increase. The ratio of the area of the stable region from attains to 89.03% (m = 3, t0 = 0.75 s). Secondly, the density wave equations—Burgers, mKdv, are derived, by using the reduced perturbation method. The solitary wave solutions of Burgers and the kink anti kink wave solutions of mKdv are given. Finally, numerical simulation results are given for the MCF-CT model and the full velocity difference model (FVD) in the case of an emergency in which the distance between vehicles is reduced by 5 m. It is found that collision can be avoided for the MCF-CT model as m = 3, t0 = 0.3 s.
Keywords:Car-Following Model, Burgers Equation, mKdv Equation, Numerical Simulation

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,随着汽车保有量的快速增加,交通事故发生率随之增加。重大交通事故还造成了严重的人员伤亡和财产损失。紧急处理事故,通畅交通成为日常性重要工作。随着互联网、通讯、自动化控制技术的发展,智能交通为驾驶员保驾护航,机动车搭载了越来越多的智能化设备,具备科技辅助功能,例如定速巡航、车车互联(Vehicle-to-Vehicle,简称V2V)通讯技术等,安装V2V设备的车辆可以实时的相互传送对方车辆行驶的基本信息(车速,车间距等),驾驶员可以借助V2V通讯设备实时地接收到前车的交通运行状态,从而针对性的调整其驾驶行为,有利于避免碰撞的发生,保障交通安全。
在Newell等 [1] 提出跟车模型后,Bando等 [2] 提出的优化速度(optimal velocity,简称OV模型)具有更广泛应用。此后,有许多学者提出了一系列扩展OV模型 [3] [4]。Jiang等 [5] 在GF模型的基础上,进行了改进,考虑速度差对交通流的影响,提出了全速度差(full velocity difference,简称FVD)模型。在FVD模型的基础上许多学者考虑多前车的速度,车间距等信息提出一系列扩展模型 [6] [7] [8] [9]。有的学者考虑真实驾驶环境中后视效应、车头间距随记忆变化的影响和道路安全驾驶的情况提出了改进模型 [10] [11] [12]。有的学者通过考虑驾驶员平稳驾驶的期望,提出改进的多期望跟驰模型 [13] [14]。伴随现代化信息采集手段不断改善,有的学者考虑在网络物理系统(CPS)环境、V2V环境下的改进模型 [15] [16] [17]。Li等 [18] 针对由低敏感度和高敏感度车辆组成的交通流,建立了一个异质跟驰模型。Ge等 [19] 考虑驾驶员对平稳驾驶的要求和历史车速数据的自稳控制,提出了改进的跟驰模型。孙棣华等 [20] 考虑驾驶员借助ITS系统,提出了考虑不同多前车速度差比重下的跟驰模型(multiple car-following,简称MCF),与FVD模型相比,通过理论分析与数值仿真表明对交通流有进一步的致稳作用。
随着智能交通系统(ITS)和车联网技术的应用,在V2V环境下,安装V2V设备的车辆可以实时的共享周围车辆的行驶信息,特别是前车的速度,加速度等基本信息,从而可以在一定程度上提前预判交通流的变化,并随之改变车辆的状态。对于高速行驶的车辆而言,V2V设备可以有效帮助驾驶员提前预警前方行驶异常的车辆,对车辆防碰撞,减少车祸的发生有着重要作用。
在本文中,将着眼于在智能环境下车辆跟驰模型的提出、改进和解决紧急交通安全的研究。基于MCF模型,考虑驾驶员通过V2V设备而提前 时刻获得多辆前车的速度信息对跟驰车辆的影响,提出MCF的扩展模型(Multiple car-following model considering time, MCF-CT)。通过线性稳定性方法,分析MCF-CT模型的稳定性,通过非线性理论分析研究多前车速度差模型,导出密度波方程——Burgers方程、mKdv方程,通过数值模拟验证模型的合理性,并分析防碰撞的情况。
2. 模型的提出
1995年,Bando等 [2] 提出了如下优化速度模型(optimal velocity model, OV):
(1)
其中 表示驾驶员在驾驶车辆过程中的敏感系数, 为第 辆车在 时刻的瞬时速度, 可以计算出车头间距为 时行驶允许的最优速度。
2001年,Jiang等 [5] 提出了FVD模型,其方程如下:
(2)
其中, , 表示驾驶员敏感系数, 表示对速度差的反应系数。
2009年,孙棣华等 [20] 考虑多车跟车模型(MCF),给出如下方程:
(3)
其中, ,且
其中 是第 辆车车头间距所占比重的系数值, 为第 辆车与第 辆车间速度差所占比重的系数值, 表示相对速度反应系数。
2015年,Li等 [9] 考虑驾驶员能够记住前 秒时的车速与当前时刻的车速,提出了当前速度与 秒前速度的速度差模型:
(4)
但是,该模型却忽略了 时间段内速度的连续变化过程。
2017年,陈春燕等 [21] 考虑利用积分中值定理,将 内的速度连续化,给出了新的跟驰模型:
(5)
其中 表示驾驶员对于速度的连续记忆,刻画了车辆连续运动。
为提高交通流的稳定性,抑制交通流拥堵,并特别地考虑紧急情况下的交通安全问题。本文考虑在MCF模型(3)的基础上引入V2V设备的影响,此时驾驶员能通过V2V设备提前 获取前方多车辆的车辆运行状态,在一定程度上预判交通流的变化,并做出相应的反应。于是,提出如下模型:
(6)
其中 ,,优化速度函数选取为文献 [21] 的形式:
(7)
其中, 是安全距离。权重参数 如下:
其中 是第 辆车车头间距所占比重的系数, 为第 辆车与第 辆车间速度差所占比重的系数, 和 体现驾驶员对前方不同车辆的关注情况。 为车道中车辆总数, 为车道中前导车数目。
为后面分析方便,将模型(6)简写为MCF-CT模型。
3. 线性稳定性分析
本节采用线性稳定性方法分析MCF-CT模型(6)的稳定性。
假定车辆在交通流系统处于完全的稳定状态时,以标准的车头间距 在道路上行驶,且所有车辆的
行驶速度均为 ,则在 时刻第 辆车的位置 为:
(8)
若在 时刻给交通系统施加一个小扰动 ,则此在扰动下 时刻第 辆车的位置 如下:
(9)
将(9)式代入(6)式,整理后得到关于扰动 的如下方程:
(10)
其中
将 代入方程(10),整理得到如下方程:
(11)
其中 。将 的展开式代入(11),并保留至 的第二项,得
稳定临界曲线条件是 ,即有:
(12)
当 时,交通流系统将处于稳定状态;而当
时,交通流的运行将不稳定,任何一个小扰动将可能造成交通流的局
部或全局拥堵。
当 时,模型(6)退化为OVM模型,其临界曲线 。当 时,由 可得, ,即相同车间距下, 的临界曲线值更小,故稳定区域得到了扩大。事实上,当 不断增大时, 不断减小,因 恒为正数,故临界曲线相对于 时的曲线是下移的。
为进一步说明稳定区域精准扩大的情况,定义稳定区域面积所占的比率为 。当 时, ,当 时, ,当 时, 。可见,MCF-CT模型(6)提高了稳定区域。下图为 时的临界曲线图像。

Figure 1. The stability curve of MCF-CT model with m = 1 and m = 2
图1. m = 1,m = 2时的MCF-CT模型的稳定曲线
![]()
Figure 2. The stability curve of MCF-CT model with m = 3 and m = 5
图2. m = 3,m = 5时的MCF-CT模型的稳定曲线
图1和图2表示在考虑了V2V的影响和多前车的车间距时,不同 对临界曲线有明显的改变,在临界曲线上方的区域,交通流的运行非常稳定,不会出现交通拥堵的现象;而在中性稳定线的下方,交通流的运行相对不稳定,出现密度波,从而产生交通拥堵的现象。特别地,当 逐渐变大时,稳定区域逐渐扩大,交通流的运行向着稳定的方向发展。从理论上讲,随着 (前导车)的增加,交通流变得更加稳定,但是随着 (前导车)的增加,也需要收集和处理更多的前导车的信息,这就对新技术提出了更高的要求,当确定 后,从图4中,可以看到当考虑前方两辆车时能有效提高模型的稳定区域,当 时,相应的曲线几乎重合,因此在该参数下,认为考虑前方三辆车 的MCF-CT模型综合效果最好(见图3)。
![]()
Figure 3. The stability curve of MCF-CT model with t0 = 0.75 s
图3. 当 秒时,MCF-CT模型的稳定曲线
综合图1~3,在车辆使用V2V技术后,驾驶员可以提前预判前方车辆的运行轨迹,因而可以将驾驶的重心更多的放在对车辆的操控,并采取有效的方式保持交通稳定,特别是还可稳定处理紧急避险的安全问题。
4. 非线性分析和孤立波
本节将导出临界点 附近的交通传播规律的非线性方程,并给出孤立波。
依据文献 [17] 的区域划分方法,由前面第3节中导出的稳定性条件,在车头间距与敏感度系数的图中依据临界曲线,将交通流的状态分为稳定区域、不稳定区域。运用约化摄动法导出相对应的Burgers方程,mKdV方程,分析交通流在不同区域密度波的传播规律。
将方程改写为:
(13)
4.1. 导出Burgers方程(在稳定区域)
在临界点附近定义慢变量 和 如下:
(14)
其中 为待定参数,
设车头间距如下:
(15)
将(14)和(15)代入(13),通过泰勒展式至 量级,得到如下非线性偏微分方程:
(16)
其中, ,,,,
令 ,消去 的二次项后,将(15)式化简为:
(17)
由线性稳定性条件:
(18)
可知,在稳定区域内:
(19)
在这里,(16)是一个Burgers方程,它的一个解为:
(20)
其中, 表示沿着 轴的斜率, 表示激波波前的坐标。 是三角激波的传播速度。三角激波相对交通流中的车辆行进方向是向后传播,当平均车间距增加时,传播速度逐渐减小。当 时,模型(6)退化为OVM模型,此时
令 ,易得:当 时, 有最大值为 。
同理,令 ,有如下结论:
i) 当 时,令 ,得 ,但因为 恒成立。因为 ,所以当取 时, ,这显然不符合实际。
ii) 当 时,即 ,令 ,得到 。当 时, 有最大值 ,由权重参数 的性质可知,当 变大时, 变大且 ,从而有 ,容易证明,当 , 时, 恒成立,从而 在 时成立,于是 ,这说明模型(6)相比较于OVM模型更容易演化为稳定的交通流。
4.2. 导出mKdv方程(在不稳定区域)
在临界点 (其中 为临界敏感度, 为临界车头间距)附近,定义两个慢变量 和 如下:
, (21)
其中 为待定参数,
设车头间距如下:
(22)
将(21)式和(22)式代入(13),利用泰勒展开式至 量级,得到如下非线性偏微分方程:
(23)
其中,
在临界点 附近,条件(12)成立,此时,取 ,,。忽略 量级时,方程(23)简化为如下形式:
(24)
其中: ;
为了得到修正后的mKdV方程,做如下线性变换:
(25)
得到含有 校正项的方程如下:
(26)
其中,
(27)
在(26)中忽略校正项 ,就是mKdV方程,它有扭结—反扭结波解为:
(28)
这里 是表示传播速度,为了得到 , 需要满足可解性条件 [11] 如下:
(29)
通过文献 [24],我们得到扭结—反扭结波的传播速度为:
(30)
于是,方程(26)的解为
(31)
因此,车头间距的扭结–反扭结密度波的解 [23] 为
(32)
从而,扭结–反扭结解的振幅 写为:
(33)
其中,
我们上式中的 代入,得到
(34)
此时,在临界点附近的扭结–反扭结解,可以表示交通流会发生交通阻塞和交通流稳定的临界情况,该过程通过mKdV方程描述,具体包括交通流稳定时的自由流相和交通阻塞时的阻塞相,由
和 分别给出了自由流相和阻塞相的车头间距。从(34)可知,当 和 增大时,振幅 越小。交通堵塞现象越弱。
5. 数值模拟
为进一步研究在V2V环境下MCF-CT模型的稳定性和防碰撞的效果,通过MATLAB 2016b编程对模型(6)进行数值模拟分析。模型的基本参数 [9] 设置如下:采样时间间隔取0.1秒; ,,,仿真步长为10,000,模型选取的优化速度为(8)式。在周期边界条件下 [22],以相同的车头间距均匀分布, 。
紧急情况下的防碰撞问题
驾驶员遇到紧急情况很常见,例如前车突然的减速、其他车辆的突然汇入,很容易引起交通流的突变,造成车辆安全事故。基于稳定性分析,在紧急情况下,考虑 的MCF-CT模型的防碰撞问题。主要考虑车辆在突发紧急情况时,制动行为导致车间距急速拉大或减小,影响到交通流的稳定性,由此判断是否会出现撞车行为。
考虑某辆前导车突然减速,使得车间距减少5米的情况。本次仿真中,正常情况下的车间距为8米,安全间距 为4米,由此,可以判断该情况对车流的影响是巨大的,很有可能发生撞车行为。
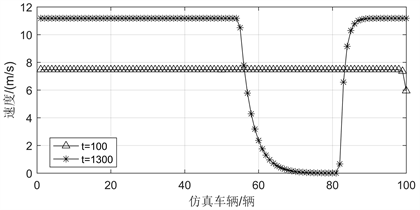
Figure 4. Velocity diagram of FVD model
图4. FVD模型下的速度图
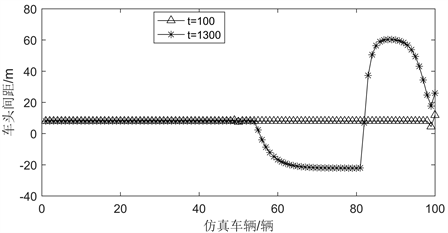
Figure 5. Vehicle waveform of FVD model
图5. FVD模型车辆波形图
从图4和图5表明,FVD模型的交通流处于很不稳定状态,特别是在图5中,密度波传播到第80辆左右时,车辆间距出现负值,出现了撞车行为。
下面考虑当 时的MCF-CT模型(6)的数值结果。

Figure 6. Velocity diagram of MCF-CT model (t = 1300)
图6. MCF-CT模型速度图(t = 1300)
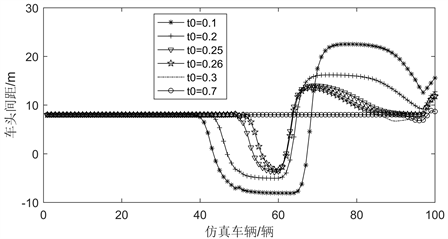
Figure 7. Vehicle waveform of MCF-CT model (t = 1300)
图7. MCF-CT模型车辆波形图(t = 1300)
从图6和图7可看出,随着 的增大,交通流逐渐趋于稳定,当 秒时,交通流稳定,这就表明,在本次模拟的特殊情况下,车辆达到避险的目的。从图7中也可以看出,当 秒时,交通流处于稳定状态,但相比于 秒,车速较低,说明 的取值过大反而会妨碍驾驶员的驾驶,使得道路通行能力下降。因为在本次数值模拟中,驾驶员的敏感系数设置较高,所以结合实际情况,认为,当 秒左右时,模型(6)对紧急防撞有积极作用。
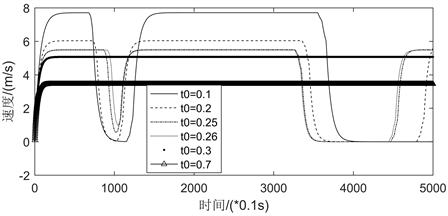
Figure 8. The 70th vehicle Velocity diagram of MCF-CT model
图8. MCF-CT模型的第70辆车速度图
图8为MCF-CT模型的第70辆车仿真步数到5000步时的速度图。从图中可以看出, 秒时,车速稳定行驶。结合图5至图8说明,当仿真步数相同时,MCF-CT模型使交通流的稳定性得到明显提升;从图8中可以看到,当 大于0.3秒时车辆的车间距都大于安全间距,这说明MCF-CT模型有效的防止了紧急情况下的撞车问题。这些结果综合表明,相比较于OVM模型和FVD模型而言,MCF-CT模型(6)在考虑多前车速度信息( 时综合效果最优)时密度波的幅值明显减少,这就意味着模型(6)更好地描述或解决了交通流的稳定性和车辆防碰撞问题。
6. 结论
在本文中,从OVM模型和FVD模型出发,借鉴MCF模型的建立思路,通过对V2V通讯技术的引入,考虑在多车跟车的情况下,可提前 时刻预测前方车辆速度,车间距等车辆运行状态,提前预判前方车辆运行轨迹,提出了MCF-CT模型(6)。通过线性稳定性分析得到了MCF-CT模型的线性稳定性条件,结果表明,MCF-CT模型的稳定区域相比较与OV模型的 增加至 ,MCF-CT模型的稳定区域明显扩大。在非线性分析中,运用约化摄动方法分析了车流的密度波变化。在稳定区域和不稳定区域分别导出了Burgers方程、mKdV方程,用其描述交通流的密度波变化。进一步,通过数值模拟验证了理论分析的结果,以及MCF-CT模型在紧急情况下对防碰撞产生的积极作用。
文章引用
李良鹏,化存才. 车–车互联下多前车速度差的跟驰模型
A Car-Following Model of the Velocity Difference of Multiple Front Vehicles Considering Vehicle-Vehicle Internet[J]. 应用数学进展, 2021, 10(07): 2292-2304. https://doi.org/10.12677/AAM.2021.107239
参考文献
- 1. Newell, G.F. (1961) Nonlinear Effects in the Dynamics of Car Following. Operations Research, 9, 209-229. https://doi.org/10.1287/opre.9.2.209
- 2. Bando, M., Hasebek, A., Nakayama, A., Shibata, A. and Sugiyama, Y. (1995) Dynamical Model of Traffic Congestion and Numerical Simulation. Physical Review E, 51, 1035-1042. https://doi.org/10.1103/PhysRevE.51.1035
- 3. Helbing, D. and Tilch, B. (1998) Generalized Force Model of Traffic Dynamics. Physical Review E, 58, 133-138. https://doi.org/10.1103/PhysRevE.58.133
- 4. 王威, 吴中. 考虑多车间距的跟驰模型及混合交通流的数值模拟[J]. 华东交通大学学报, 2018, 35(6): 72-80.
- 5. Jiang, R., Wu, Q.S. and Zhu, Z.J. (2001) Full Velocity Difference Model for a Car-Following Theory. Physical Review. E, 64, Article ID: 017101. https://doi.org/10.1103/PhysRevE.64.017101
- 6. 王涛, 高自友, 赵小梅. 多速度差模型及稳定性分析[J]. 物理学报, 2006, 55(2): 634-640.
- 7. Yu, S.W. and Shi, Z.K. (2015) The Effects of Vehicular Gap Changes with Memory on Traffic Flow in Cooperative Adaptive Cruise Control Strategy. Physica A: Statistical Mechanics and Its Applications, 428, 206-223. https://doi.org/10.1016/j.physa.2015.01.064
- 8. Yu, S.W., Zhao, X.M., Xu, Z.G. and Zhang, L. (2016) The Effects of Velocity Difference Changes with Memory on the Dynamics Characteristics and Fuel Economy of Traffic Flow. Physica A: Statistical Mechanics and its Applications, 461, 613-628. https://doi.org/10.1016/j.physa.2016.06.060
- 9. Li, Z.P., Li, W.Z., Xu, S.Z. and Qian, Y. (2015) Analyses of Vehicle’s Self-Stabilizing Effect in an Extended Optimal Velocity Model by Utilizing Historical Velocity in an Environment of Intelligent Transportation System. Nonlinear Dynamics, 80, 529-540. https://doi.org/10.1007/s11071-014-1886-z
- 10. Jin, Z.Z., Cheng, R.J. and Ge, H.X. (2017) Nonlinear Density Wave and Energy Consumption Investigation of Traffic Flow on a Curved Road. Chinese Physical B, 26, Article ID: 110504. https://doi.org/10.1088/1674-1056/26/11/110504
- 11. Ma, G.Y., Ma, M.H., Liang, S.D., Wang, Y.S. and Guo, H. (2020) Nonlinear Analysis of the Car-Following Model Considering Headway Changes with Memory and Backward Looking Effect. Physica A: Statistical Mechanics and Its Applications, 562, Article ID: 125303. https://doi.org/10.1016/j.physa.2020.125303
- 12. Jiao, S.Y., Zhang, S.R., Zhou, B., Zhang, L. and Xue, L. (2020) Dynamic Performance and Safety Analysis of Car-Following Models Considering Collision Sensitivity. Physica A: Statistical Mechanics and Its Applications, 564, Article ID: 125504. https://doi.org/10.1016/j.physa.2020.125504
- 13. 唐亮, 孙棣华, 彭光含. 基于多车信息的交通流跟驰模型与数值仿真[J]. 系统仿真学报, 2012, 24(2): 293-296.
- 14. Chen, J.Z., Liu, R.H., Dong, N.D. and Shi, Z. (2016) A New Multi-Anticipative Car-Following Model with Consideration of the Desired Following Distance. Nonlinear Dynamics, 85, 2705-2717. https://doi.org/10.1007/s11071-016-2856-4
- 15. Sun, D.H., Kang, Y.R. and Yang, S.H. (2015) A Novel Car Following Model Considering Average Velocity of Preceding Vehicles Group. Physica A: Statistical Mechanics and Its Applications, 436, 103-109. https://doi.org/10.1016/j.physa.2015.04.028
- 16. 吴兵, 王文璇, 李林波, 刘艳婷. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194.
- 17. Li, S.H., Wang, T., Cheng, R.J. and Ge, H.X. (2020) An Extended Car-Following Model Considering the Driver’s Desire for Smooth Driving and Self-Stabilizing Control with Velocity Uncertainty. Mathematical Problems in Engineering, 2020, Article ID: 9546012. https://doi.org/10.1155/2020/9546012
- 18. Li, T.L., Hui, F., Liu, C., Zhao, X.M. and Khattak, A.J. (2020) Analysis of V2V Messages for Car-Following Behavior with the Traffic Jerk Effect. Journal of Advanced Transportation, 2020, Article ID: 9181836. https://doi.org/10.1155/2020/9181836
- 19. Li, Z.P., Xu, X., Xu, S.Z. and Qian, Y.Q. (2017) A Heterogeneous Traffic Flow Model Consisting of Two Types of Vehicles with Different Sensitivities. Communications in Nonlinear Science and Numerical Simulation, 42, 132-145. https://doi.org/10.1016/j.cnsns.2016.05.016
- 20. Peng, G.H. and Sun, D.H. (2009) Multiple Car-Following Model of Traffic Flow and Numerical Simulation. Chinese Physical B, 18, 5420-5430. https://doi.org/10.1088/1674-1056/18/12/049
- 21. 陈春燕, 志鹏, 邝华. 连续记忆效应的交通流跟驰模型建模与稳定性分析[J]. 广西师范大学学报, 2017, 35(3): 14-21.
- 22. 袁娜, 化存才. 多前车速度差的车辆跟驰模型的稳定性与孤波[J]. 物理学报, 2012, 61(15): 108-114.
- 23. Ge, H.X., Cheng, R.H. and Dai, S.Q. (2005) KdV and Kink-Antikink Solitons in Car-Following Models. Physica A: Statistical Mechanics and Its Applications, 357, 466-476. https://doi.org/10.1016/j.physa.2005.03.059
- 24. Li, T. and Ge, H.X. (2006) An Extended Car-Following Model for ITS and Its Kink-Antikink Solutions. China Academic Journal Electronic Publishing House, Dalian, 473-483.
NOTES
*第一作者。
#通讯作者。