International Journal of Mechanics Research
Vol.04 No.02(2015), Article ID:15593,9
pages
10.12677/IJM.2015.42007
Direct Adaptive Neural Network Control for a Class of Uncertain Nonlinear Systems
Zhenfeng Chen
College of Automation, Guangdong Polytechnic Normal University, Guangzhou Guangdong
Email: zfchen.cn@163.com
Received: Jun. 10th, 2015; accepted: Jun. 23rd, 2015; published: Jun. 30th, 2015
Copyright © 2015 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
In this paper, a novel systematic design procedure is presented for a class of uncertain nonlinear systems. Such design procedure can remove the control input terms which contain the unknown nonlinearities as the control coefficients, and provide the following advantages. It not only avoids a possible singularity problem completely, but also simplifies the control design process. Moreover, the proposed design procedure can provide simple control structure under the relaxed conditions, which is easy to implement and can be applied to a wider class of systems.
Keywords:Adaptive Control, Lyapunov Function, Stability
一类不确定非线性系统的直接自适应神经网络控制
陈贞丰
广东技术师范学院自动化学院,广东 广州
Email: zfchen.cn@163.com
收稿日期:2015年6月10日;录用日期:2015年6月23日;发布日期:2015年6月30日

摘 要
本文针对一类不确定非线性系统,提出一种新颖的系统化设计策略。该设计策略能够去除控制增益为未知非线性函数的控制输入项,并由此带来如下优点:不仅能够避免控制奇异问题,还能够简化控制系统设计。此外,该设计策略能够在宽松条件下导出简单的控制结构,便于工程实现并且能够运用到更一般的系统当中。
关键词 :自适应控制,Lyapunov函数,稳定性

1. 引言
当模型不确定性满足Lipschitz条件或者存在着较小的上界时,可以设计线性的扰动观测器和线性的控制策略,减少或抵消模型不确定的影响,保证系统有良好的性能。如果模型不确定性不满足Lipschitz条件或者其上界比较大,如何设计一个合乎要求的控制器,使得系统的不确定性对系统性能的影响尽量小,是一个具有挑战的问题。
为了解决此问题,本文提出一种新颖的自适应神经网络控制策略。首先考虑一类控制系数为未知函数的SISO仿射非线性系统,其不确定性分为二部分:不显含控制的项 和含控制的仿射项
和含控制的仿射项 ,其中
,其中 和
和 可能不满足Lipschitz条件或者其上界比较大。对于这类系统,尽管假设了
可能不满足Lipschitz条件或者其上界比较大。对于这类系统,尽管假设了 (即被控系统具有可控性),但在自适应控制对仿射项
(即被控系统具有可控性),但在自适应控制对仿射项 进行估计时可能出现控制奇异问题[1] ,即在参数自学习过程中,逼近模型在某一点上由于
进行估计时可能出现控制奇异问题[1] ,即在参数自学习过程中,逼近模型在某一点上由于 (其中
(其中 为
为 的估计)而可能失去其可控性。为了解决控制奇异问题,文[2] 建议离线学习选取与理想值
的估计)而可能失去其可控性。为了解决控制奇异问题,文[2] 建议离线学习选取与理想值 充分靠近的值作为
充分靠近的值作为 的初始值
的初始值 ;文[3] -[5] 提出通过projection算法将
;文[3] -[5] 提出通过projection算法将 约束到一个可行域内部来避免控制奇异问题,但可行域的构造需要一些先验知识;文[4] [6] 提出利用神经网络或者模糊系统来逼近函数
约束到一个可行域内部来避免控制奇异问题,但可行域的构造需要一些先验知识;文[4] [6] 提出利用神经网络或者模糊系统来逼近函数 的逆,但前提条件是已知
的逆,但前提条件是已知 的1阶导数的上界。不同于文[2] -[6] ,本文所提出的控制策略是,通过等价变换将仿射项
的1阶导数的上界。不同于文[2] -[6] ,本文所提出的控制策略是,通过等价变换将仿射项 分成二项:一项控制系数为常数,另一项控制系数为未知函数;基于此,构造自适应神经网络控制器对模型不确定性进行补偿,同时使得仿射项中控制系数为未知函数的一项在Lyapunov函数的导数中保持半负定,从而避免了控制奇异问题。
分成二项:一项控制系数为常数,另一项控制系数为未知函数;基于此,构造自适应神经网络控制器对模型不确定性进行补偿,同时使得仿射项中控制系数为未知函数的一项在Lyapunov函数的导数中保持半负定,从而避免了控制奇异问题。
2. 问题描述
考虑如下SISO不确定仿射非线性系统
 (1)
(1)
其中, ,
, 和
和 分别为系统
分别为系统 的状态变量,控制输入和系统输出,
的状态变量,控制输入和系统输出, 与
与 均为未知的光滑函数;控制设计目标为:设计直接自适应神经网络控制器
均为未知的光滑函数;控制设计目标为:设计直接自适应神经网络控制器 使之与系统
使之与系统 构成的闭环系统为半全局一致最终有界,同时其输出
构成的闭环系统为半全局一致最终有界,同时其输出 能够有效地跟踪光滑参考信号
能够有效地跟踪光滑参考信号 。
。
预备知识
RBF神经网络具有良好的逼近性质[7] 。本文借助RBF神经网络来逼近控制系统中连续的未知非线性函数,其数学模型如下
 (2)
(2)
式中, 为非线性映射,
为非线性映射, 为输入向量,
为输入向量, 为权值向量,
为权值向量, 为神经网络节点的个数,
为神经网络节点的个数, ,其中
,其中 采用高斯函数,即
采用高斯函数,即
 (3)
(3)
式中, 为第
为第 个基函数的中心点,
个基函数的中心点, 为高斯函数围绕中心点
为高斯函数围绕中心点 的宽度。
的宽度。
假设1 对于任一给定常数 和连续函数
和连续函数 ,存在理想的权值
,存在理想的权值 使得
使得 可以表述为
可以表述为
 (4)
(4)
且 ,其中
,其中 为逼近误差。
为逼近误差。
引理1[8] 对于高斯RBF神经网络逼近器(3)-(4), 存在常数 使得
使得
 (5)
(5)
式中, 为无穷数列
为无穷数列 的极值,其中
的极值,其中 。应该指出,
。应该指出, 与神经网络的输入变量
与神经网络的输入变量 、节点数
、节点数 无关。
无关。
定义1 (半全局一致最终有界)[9] 考虑系统
 (6)
(6)
其中 是光滑函数,其解
是光滑函数,其解 是半全局一致最终有界,如果对于任一给定的紧集
是半全局一致最终有界,如果对于任一给定的紧集 ,存在常数
,存在常数 使得
使得 。
。
3. 自适应神经网络控制的设计及其稳定性分析
在给出系统 设计之前,引入如下一些常用的假设。
设计之前,引入如下一些常用的假设。
假设2 存在未知常数 使得
使得 。
。
假设2中的 为系统的可控性条件,其意味着光滑函数
为系统的可控性条件,其意味着光滑函数 为严格正定或者严格负定。不失一般性,假定
为严格正定或者严格负定。不失一般性,假定 。
。
假设3 参考信号 已知,并且
已知,并且 ,其中
,其中 为
为 的一个紧集。
的一个紧集。
引入跟踪误差 和
和
 (7)
(7)
 (8)
(8)
式中,常数 且
且 。由[10] 可知,跟踪误差
。由[10] 可知,跟踪误差 在
在 上渐近收敛于原点。
上渐近收敛于原点。
由式(1)与式(8)可知, 关于时间的导数为
关于时间的导数为
 (9)
(9)
式中, 。
。
构造候选的Lyapunov函数
 (10)
(10)
其关于时间的导数为
 (11)
(11)
式中, ,
, 。
。
控制设计的基本思想为:通过适当地构造式(11)的可设计项来确保 ,即如果
,即如果 的选取使得(i)
的选取使得(i) ,其中
,其中 为待定常数;(ii)
为待定常数;(ii) ,则
,则 且
且 为系统(9)的平衡点。
为系统(9)的平衡点。
3.1. 控制设计方案I
由于 与
与 未知且
未知且 为光滑函数,因而
为光滑函数,因而 中的
中的 为关于
为关于 与
与 的未知光滑函数。由RBF神经网络的逼近性质可知,
的未知光滑函数。由RBF神经网络的逼近性质可知, 可表述成
可表述成
 (12)
(12)
式中, 为逼近误差,
为逼近误差, 为理想的权值使得
为理想的权值使得 ,其中常数
,其中常数 。
。
构造控制器
 (13)
(13)
式中, 为
为 的估计值,
的估计值, ,参数
,参数 ,常数
,常数 为待定小量。
为待定小量。
由假设2可知
 (14)
(14)
考虑如下候选的Lyapunov函数
 (15)
(15)
式中, ,且
,且 为自适应增益矩阵。
为自适应增益矩阵。
由式(11)-式(15),可得
 (16)
(16)
考虑到
 (17)
(17)
 (18)
(18)
设计自适应律
 (19)
(19)
式中, 为待定常数。
为待定常数。
引理2[11] 对于式(19),存在紧集 为
为
 (20)
(20)
使得如果 ,则
,则 ,其中常数
,其中常数 为
为 的上界。
的上界。
由式(18)-式(20),可得
 (21)
(21)
由Young不等式,可得
 (22)
(22)
 (23)
(23)
将式(21)-式(23)代入式(16),可得
 (24)
(24)
式中, 。
。
基于以上的设计与分析,如下定理给出系统 的闭环稳定性及其动态性能。
的闭环稳定性及其动态性能。
定理1 假定存在充分大的紧集 使得
使得 ,则对于所有有界的初始条件,系统
,则对于所有有界的初始条件,系统 在假设1-3下与满足式(13)与式(19)的控制器
在假设1-3下与满足式(13)与式(19)的控制器 所构成的闭环系统有如下性质
所构成的闭环系统有如下性质
(i) 闭环系统为半全局一致最终有界,且状态变量 收敛于集合
收敛于集合
 (25)
(25)
式中, 。
。
(ii) 输出跟踪误差满足
 (26)
(26)
式中, 。
。
证明 (i)由式(18)可知,当 在紧集
在紧集
 (27)
(27)
之外时有 ,式中
,式中 。这意味着
。这意味着 随着时间增长收敛于
随着时间增长收敛于 。
。
由引理2与有界定理[12] 可知, 与
与 为半全局一致最终有界。由注2可知,
为半全局一致最终有界。由注2可知, 有界意味着状态
有界意味着状态 随时间收敛于集合
随时间收敛于集合 ,其中
,其中 定义见于式(25)。又由式(13)可知,
定义见于式(25)。又由式(13)可知, 亦有界。由此,闭环系统所有信号为半全局一致最终有界。
亦有界。由此,闭环系统所有信号为半全局一致最终有界。
(ii) 对式(24)在区间 上积分,可得
上积分,可得
 (28)
(28)
注意到 ,因此
,因此
 (29)
(29)
并得证。 ■
注2:为了解决控制奇异问题,不同于文[2] -[6] ,本文所提出的控制策略是,通过构造自适应神经网络控制器对模型不确定性进行补偿,同时使得控制系数为未知函数的项在Lyapunov函数的导数中保持半负定,从而避免了控制奇异问题。
为了满足快速性、可实现性和高可靠性等方面的要求,工程实际总是希望控制结构与算法尽量简单。基于此,控制策略II的提出能进一步减少控制器(13)中神经网络输入的维数。
3.2. 控制设计方案II
式(9)可以重写成
 (30)
(30)
引理3[10] [13] 假定 与
与 已知,且
已知,且 。如果控制器
。如果控制器 设计为
设计为
 (31)
(31)
式中, ,
, ,则系统(30)的状态变量
,则系统(30)的状态变量 随着时间增长收敛于集合
随着时间增长收敛于集合
 (32)
(32)
式中,常数 和
和 为待定参数。
为待定参数。
证明 考虑 ,且已知
,且已知 ,可得
,可得
 (33)
(33)
由Young不等式,可得
 (34)
(34)
由式(33)-式(34),可得
 (35)
(35)
这意味着 随时间增长收敛于集合
随时间增长收敛于集合 。 ■
。 ■
由于 与
与 未知,且
未知,且 为关于
为关于 的光滑函数,故
的光滑函数,故 中的
中的 为关于
为关于 的未知光滑函数。由RBF神经网络的逼近性质可知,
的未知光滑函数。由RBF神经网络的逼近性质可知, 可写成
可写成
 (36)
(36)
式中, 为逼近误差,
为逼近误差, 为理想的权值使得
为理想的权值使得 ,其中常数
,其中常数 。
。
设计控制 为
为
 (37)
(37)
式中, 与
与 的定义见于式(13),且
的定义见于式(13),且 的自适应律采用式(19)。
的自适应律采用式(19)。
由假设2可知
 (38)
(38)
类似于控制策略I的分析,有如下结论。
定理2 假定存在充分大的紧集 使得
使得 ,则对于所有有界的初始条件,系统
,则对于所有有界的初始条件,系统 在假设1-3下与满足式(37)与式(19)的控制器
在假设1-3下与满足式(37)与式(19)的控制器 所构成的闭环系统有如下性质:
所构成的闭环系统有如下性质:
(i) 闭环系统所有变量为半全局一致最终有界,且状态变量 收敛于集合
收敛于集合
 (39)
(39)
式中, ,
, 的定义见于式(25)。
的定义见于式(25)。
(ii) 输出跟踪误差满足
 (40)
(40)
式中, ,
, 的定义见于式(26)。
的定义见于式(26)。
4. 仿真实例
为了说明所提出的控制策略的有效性,考察如下SISO不确定非线性系统
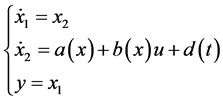 (41)
(41)
式中, 与
与 均为未知函数,
均为未知函数, 为外部干扰。
为外部干扰。
控制设计目标是:设计控制输入 使得系统输出
使得系统输出 能够有效地跟踪参考信号
能够有效地跟踪参考信号 ,其中
,其中 为如下van der Pol振子的输出信号
为如下van der Pol振子的输出信号
 (42)
(42)
式中,当 时van der Pol振子的输出轨迹出现极限环。
时van der Pol振子的输出轨迹出现极限环。
系统 的控制策略I自适应神经网络控制器的设计采用式(13),即
的控制策略I自适应神经网络控制器的设计采用式(13),即

式中, ,
, ,
, ,
, 且
且

控制器参数选取 ,
, ,
, ,
, ,
, ,初始值的选取为
,初始值的选取为 ,
, ,
, ,其中神经网络
,其中神经网络 选取27个节点(即
选取27个节点(即 ),
), ,
, ,中心值
,中心值 在区间
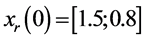
在区间 上为均匀分布。图1(a)表明了控制系统状态有界;图1(b)表明了系统跟踪性能良好,系统输出经过2秒左右就能够较好地跟踪参考信号;图1(c)表明了系统控制量有界;图1(d)表明了神经网络状态逼近器
上为均匀分布。图1(a)表明了控制系统状态有界;图1(b)表明了系统跟踪性能良好,系统输出经过2秒左右就能够较好地跟踪参考信号;图1(c)表明了系统控制量有界;图1(d)表明了神经网络状态逼近器 能够较好地逼近未知函数
能够较好地逼近未知函数 。
。
系统 的控制策略II自适应神经网络控制器的设计采用式(37),即
的控制策略II自适应神经网络控制器的设计采用式(37),即

式中, ,
, ,
, ,
, ,其余参数取值不变。
,其余参数取值不变。
由于图1(a)和图1(b)可知,尽管神经网络输入维数减少,但被控系统的控制性能保持不变,系统输出保持着经过2秒左右就能够较好地跟踪参考信号;比较于图1(c)与图2(c)可知,神经网络输入维数减
 (a) (b)
(a) (b) (c) (d)
(c) (d)
Figure 1. Simulation results of the control scheme I of SISO nonlinear systems (a) System state x; (b) System output y follows yr; (c) System control u; (d) Approximator  and uncertainty
and uncertainty
图1. SISO非线性系统控制策略I的仿真结果 (a) 系统状态量x; (b) 系统输出量y 跟;踪yr; (c) 系统控制量u; (d) 估计器 与不确定性
与不确定性
 (a) (b)
(a) (b)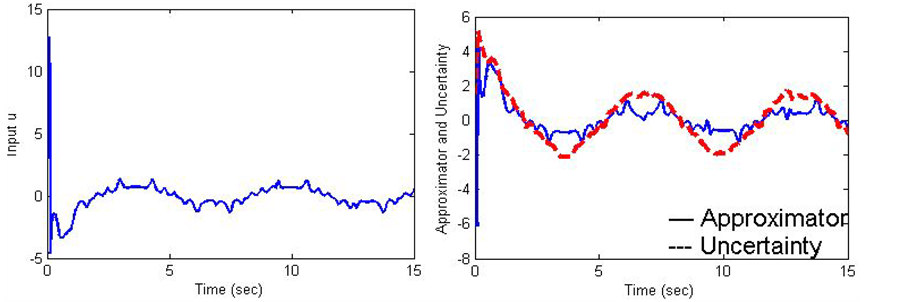 (c) (d)
(c) (d)
Figure 2. Simulation results of the control scheme II of SISO nonlinear systems (a) System state x; (b) System output y follows yr; (c) System control u; (d) Approximator  and uncertainty
and uncertainty
图2. SISO非线性系统控制策略II的仿真结果 (a) 系统状态量x; (b) 系统输出量y跟踪yr; (c) 系统控制量u; (d)估计器 与不确定性
与不确定性
少,控制系统输出量在开始时刻幅度增大,但很快进入有界的周期信号;图1(d)和图2(d)表明了神经网络状态逼近器 能够较好地逼近未知函数。
能够较好地逼近未知函数。
5. 结论
针对一类控制增益为未知非线性函数的不确定非线性系统,本文提出了一种新颖的系统化设计策略。该设计策略不仅能够避免控制奇异问题,还能够简化控制系统设计。此外,该设计策略能够在宽松条件下导出简单的控制结构,便于工程实现并且能够运用到更一般的系统当中。
基金项目
国家自然科学基金(61374003), 2014年广东普通高校青年创新人才项目:“不确定非仿射非线性系统的输出调节及其应用研究”;2013年广东技术师范学院博士科研规划项目;广东技术师范学院校项目(14KJY12)。
文章引用
陈贞丰, (2015) 一类不确定非线性系统的直接自适应神经网络控制
Direct Adaptive Neural Network Control for a Class of Uncertain Nonlinear Systems. 力学研究,02,51-60. doi: 10.12677/IJM.2015.42007
参考文献 (References)
- 1. Bryson Jr., A.E. and Ho, Y.C. (1969) Applied optimal control: optimization, estimation and control. Blaisdell Publishing Company, Waltham.
- 2. Chen, F.C. and Liu, C.C. (1994) Adaptively controlling nonlinear continuous time systems using multilayer neural net- works. IEEE Transactions on Automatic Control, 39, 1306-1310.
- 3. Polycarpou, M.M. and Ioannou, P.A. (1992) Modeling, identification and stable adaptive control of continuous-time nonlinear dynamical system using neural networks. Proceedings of the American Control Conference, Chicago, 24-26 June 1992, 36-40.
- 4. Wang, L.X. (1994) Adaptive fuzzy systems and control: Design and analysis. Prentice-Hall, Englewood Cliffs.
- 5. Spooner, J.T. and Passino, K.M. (1996) Stable adaptive control using fuzzy systems and neural networks. IEEE Transactions on Fuzzy Systems, 4, 339-359.
- 6. Sanner, R.M. and Slotine, J.E. (1992) Gaussian networks for direct adaptive control. IEEE Transactions on Neural Networks, 3, 837-863.
- 7. Haykin, S. (1999) Neural networks: A comprehensive foundation. 2nd Edition, Pren-tice-Hall, Englewood Cliffs.
- 8. Ge, S.S. and Wang, C. (2004) Adaptive neural control of uncertain MIMO nonlinear sys-tems. IEEE Transactions on Neural Networks, 15, 674-692.
- 9. Tee, K.P., Ge, S.S. and Tay, F.E.H. (2008) Adaptive neural network control for helicopters in vertical flight. IEEE Transactions on Control Systems Technology, 16, 753-762.
- 10. Chen, Z., Ge, S.S., Zhang, Y. and Li, Y. (2014) Adaptive neural control of MIMO nonlinear systems with a block-triangular pure-feedback control structure. IEEE Transactions on Neural Networks and Learning Systems, 25, 2017-2029.
- 11. Huang, S.N., Tan, K.K. and Lee, T.H. (2004) An improvement on stable adaptive control for a class of nonlinear systems. IEEE Transactions on Automatic Control, 49, 1398-1403.
- 12. Qu, Z. (1998) Robust control of nonlinear uncertain systems. Wiley, New York.
- 13. Chen, Z. and Zhang, Y. (2014) Robust control of a class of non-affine nonlinear systems by state and output feedback. Journal of Central South University, 21, 1322-1328.