Geomatics Science and Technology
Vol.05 No.03(2017), Article ID:21331,8
pages
10.12677/GST.2017.53015
The Application of UAV Autonomous Navigation Mapping Large Scale Topographic Map
Zhengxiang Wang1, Qin Liu1, Dong Sun2
1Three Gorges Geotechnical Consultants Co., Ltd., Wuhan Hubei
2Sichuan Zhong Shui Cheng Kuan Yuan Surveying and Mapping Engineering Co., Ltd., Chengdu Sichuan

Received: Jun. 26th, 2017; accepted: Jul. 9th, 2017; published: Jul. 12th, 2017

ABSTRACT
Based on the combination of unmanned aerial vehicles and GPS, through the setting of route theory, the flight path has been modified according to the Plotting course, and a complete set of UAV autonomous navigation mapping large scale topographic map technology has been formed. The Technology successfully completed the 1:2000 aerial photography measurement project of Wu Dongde Hydropower Station resettlement planning area. The results meet the requirements of the specification, and achieve the purpose of design planning.
Keywords:Large Scale Topographic Map, UAV Autonomous Navigation
无人机自主导航测绘大比例尺地形图及应用
王正祥1,刘琴1,孙东2
1长江三峡勘测研究院有限公司,湖北 武汉
2四川中水成勘院测绘工程有限责任公司,四川 成都
收稿日期:2017年6月26日;录用日期:2017年7月9日;发布日期:2017年7月12日

摘 要
利用无人机与GPS相结合的手段,通过航线理论的设定,修正航迹按规划航线飞行,形成了一套完整的无人机自主导航测绘大比例尺地形图技术,圆满完成乌东德水电站移民安置规划区1∶2000航空摄影测量项目,成果质量满足规范要求,达到设计规划目的。
关键词 :大比例尺地形图,自主导航无人机

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
无人机是一种由动力驱动、无人驾驶、可重复使用的航空器的简称,英文常用Unmanned Aerial Vehicle表示,缩写为UAV。随着无人机运用领域的日益扩大和需求量的提高,计算机技术和导航技术的发展成熟,全球定位系统——GPS系统的广泛应用,其具有实时定位快,精度高、实时效果佳、使用方便等优点。自主导航作为无人机的重要需求功能之一,得到了充分的重视和快速发展,逐渐发展出了一个崭新的独立模块——航迹系统 [1] 。本文介绍了一种小型无人机自主导航测绘大比例尺地形图的方法,其被成功地运用于乌东德水电站移民安置规划区1: 2000航空摄影测量项目。
2. 自主导航的基本理论方法
2.1. GPS RTK动态测量
常规的GPS测量方法,一般都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,其定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。载波相位动态实时差分(Real-time kinematic)方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新曙光,极大地提高了外业作业效率 [2] 。
2.2. 航线规划设定
无人机任务规划是指根据无人机需要完成的任务、无人机的数量以及携带任务载荷的类型,对无人机制定飞行路线并进行任务分配。
任务规划的主要目标是依据地形信息和执行任务的环境条件信息,综合考虑无人机的性能、到达时间、耗能、威胁以及飞行区域等约束条件,为无人机规划处一条或多条自出发点到目标点的最优或次优航迹,保证无人机高效、圆满地完成飞行任务 [3] 。
无人机任务规划需要实现以下功能:
1) 任务分配功能
充分考虑无人机自身性能和携带载荷的类型,可在多任务、多目标情况下协调无人机及其载荷资源之间的配合,以最短时间以及最小代价完成既定任务。
2) 航线规划功能
在无人机避开限制风险区域以及油耗最小的原则上,制定无人机的起飞、着陆、接近监测点、离开监测点、返航及应急飞行等任务过程的飞行航迹。
3) 仿真演示功能
能够实现飞行仿真演示、环境威胁演示、监测效果显示。可进行基于数字地图的合成图像计算,显示不同坐标与海拔位置上的地景图像,以便地面操作人员为执行任务选取最佳方案。
2.3. 航线信息设定
航线信息规划由地面控制站预先计算和设定,通过程序写入飞控计算机存储器中。航点通过直线或圆弧线连接为航路,多条航路组成航线。每过一航点,飞控计算机会在其内存中读出该航点的数据信息和控制信息,为该航路自主导航控制服务。同时读出下一航点信息,为下一航路的导航控制做准备。
2.4. 航迹系统的工作形态
当航线设定完毕后,可以利用航迹数据装订功能,迅速地将航线数据传送到无人机的飞控系统中。实际的操作过程是,航迹系统通过网络将航线数据传送到地面控制系统,然后由地面控制系统通过无线链路将数据传送给无人机的飞行控制系统。
根据航线形态,一般分为直线航线和圆弧航线,无人机自主导航的目标通过控制率改变无人机姿态,使它能按照这两种航线自主飞行 [4] 。
1) 直线航线
自主导航依靠横向滚转角的变化来改变其横向姿态,当无人机按直线航线飞行时,横向姿态给定滚转角为:

其中, 为飞机地速、
为飞机地速、 为偏航角、
为偏航角、 为侧偏距。
为侧偏距。
自主导航中,无人机需要对何时执行完本条航线的飞行,进入下一条航线进行判断,这里采取计算无人机实时点到末端垂线间的待飞距离来做过点判断,如图1。
2) 圆弧航线
圆弧航线横向姿态给定滚转角为:
其中, 为飞机地速、
为飞机地速、 为转弯半径。
为转弯半径。 、
、 求法与直航线相同。
求法与直航线相同。
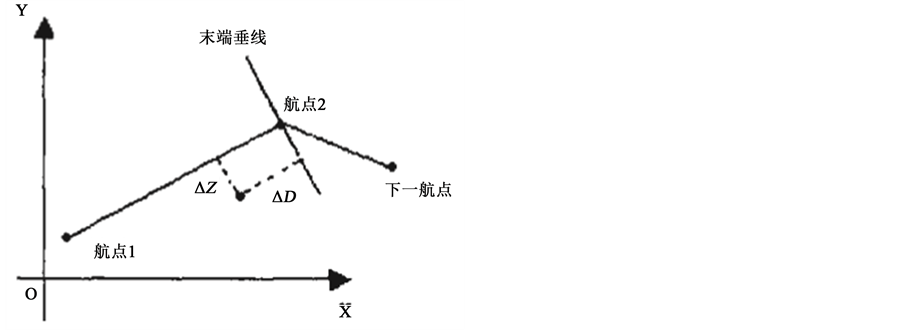
Figure 1. Angle judgment control of unmanned aerial vehicle
图1. 无人机转角判断控制
2.5. 导航软件及流程
导航软件实现及流程 [5] :
1) 初始化模块,实现GPS接收机初始化;
2) 集成数据模块,接收GPS数据;
3) 终端分析平台模块,实现GPS有效数据的提取与转换;
4) 导航预处理模块,实现航线装订、提取航点信息,坐标转换等功能;
5) 航迹监测器,用于计算线路重合率;
6) 输出模块,输出舵机控制量实现自主导航。通过GPS获得无人机的实时定位信息,修正无人机飞行姿态;同时进行过点判断,使无人机按照规划航路自主飞行。
3. 应用案例
3.1. 项目概况
金沙江乌东德水电站移民安置规划会理、会东、元谋测区1:2000航空摄影测量工作,此项目位于四川省会理县、会东县和云南省元谋县境内。测区范围62 km2,概略坐标:北纬25˚26'50''N~27˚07'25'',东经101˚49'21''E~102˚32'54'',南北跨度达189公里 [6] 。
3.2. 作业方案
鉴于测区面积较大,时间要求紧,本项目采用无人机航摄获取测区地面分辨率优于20cm的数码影像数据,并采用航带布点方式测设像控点,内业空三加密后,采用全数字航空摄影测量工作站生产工艺制作测区1:2000数字地形图 [7] 。总体实施技术路线见图2。

Figure 2. Route map of implementation technology
图2. 实施技术路线图
3.3. 采用的仪器设备
1) GPS接收机,中海达,精度指标5 mm + 1 ppm,利用“差分GPS定位技术”RTK精度可以达到0.02米。
2) 无人机
此次作业采用KC1600型无人机遥感系统,经过多次的测试飞行及测区实验成图均满足精度要求。该无人机具有可靠性高、飞行场地适应性强、飞行姿态平稳、航片质量高、维护便捷等优点。KC1600型无人机外观(见图3)。
3) 航空摄影采用NikonD800码相机进行拍摄,相机参数:焦距:35.98 mm;感光器件:7360 × 4912像素,35.9 × 24.0 mm,像元大小4.88 μm (见图4) [8] 。
3.4. 影像数据采集范围与飞行航迹
本次飞行共选取了4个起降场,分别位于元谋县启宪、元谋老城乡、会理县瓦窑塘、会理县甸沙关。无人机飞行航迹线见图5。


Figure 3. Technical parameter
图3. 技术参数
Figure 4. NikonD800码相机
图4. NikonD800 camera

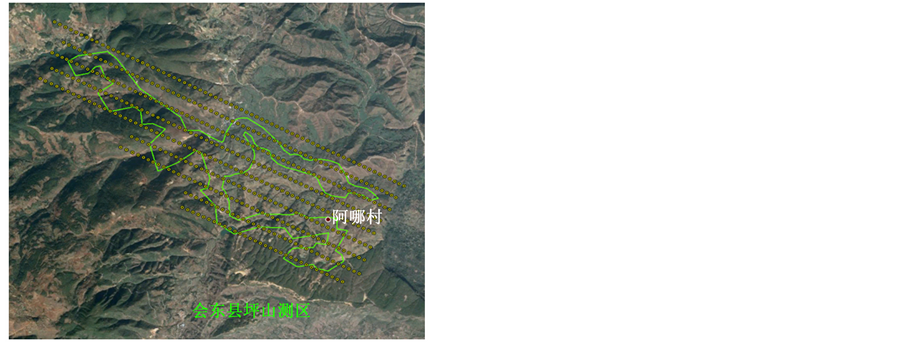



(1) 会理县甸沙关测区 (2) 会东县坪山测区 (3) 会理县富乐测区 (4) 元谋县启宪测区 (5) 元谋县东山大沟测区
Figure 5. Flight path chart of UAV
图5. 无人机飞行航迹线图
3.5. 航空摄影
3.5.1. 航拍要求
1) 按照检查单进行起飞前的检查作业,确认设备状态正常;系统按要求完成GPS和IMU的初始化;
2) 确定首选作业区气象状况是否适合作业,是否需要转向备用作业分区;
3) 落地后按要求时间做完GPS和IMU的观测;
4) 从设备中下载POS和影像数据;
5) 回到驻地尽快将数据做好双备份;
6) 在随机软件CaptureOne中预览相机采集的原始未解压数据,查看影像有无黑片、掉片现象,检查有无影像拉花、云量过多等问题;
7) 发现影像存在质量问题,必须尽早安排补飞 [9] 。
3.5.2. 飞行情况和影像质量检查
此次航飞工作开展的时间正值夏季,雷阵雨很多,起降场相隔较远,适合飞行作业的时间稍纵即逝。为了保证飞行安全和获取高质量的数码影像,只能选择能见度高、风速较小的时间段开展航摄工作。现场对航片的完整性进行了检查,主要检查项有:
1) 重叠度检查:航向重叠达到了75%,最小不小于65%,旁向重叠达到了45%,最小不小于35%,整个测区没有出现相对漏洞和绝对漏洞。
2) 俯仰角检查:航片俯仰角一般小于3˚,个别最大不超过11˚。
3) 滚转角检查:航片滚转角一般小于3˚,个别最大不超过11˚。
4) 旋偏角检查:航片旋偏角一般小于6˚,最大不超过8˚。
5) 航线弯曲不大于3%。
6) 同一航线上相邻像片的航高差无大于30 m的情况出现,最大和最小航高之差不大于50 m。
3.5.3. 空三加密
1) 在获取影像和像控点成果后,本项目选用了PixelGrid_VZ摄影测量系统进行空三加密。地形点最弱点中误差为:
X:0.365 m
Y:0.332 m
H:0.527 m
2) 空三加密像控点残差统计见表1 [10] 。

Table 1. List of residual error statistics of empty encryption image
表1. 空三加密像控点残差统计一览表
按《数字摄影测量空中三角测量规范》空三加密允许最大值:平面1.6 m;高程:1.8 m。
3) 空三加密整体平差后中误差为:
Sigma naught: 2.7 [micron] = 0.6 [像素]
4. 结语
通过乌东德水电站移民安置规划区1:2000航空摄影测量项目的试验性生产,各项成果资料均满足规范及设计要求,说明无人机自主导航测绘大比例尺地形图技术能广泛运用于测绘大比例尺地形测绘工作。但是,实际测绘工作中,发现GPS用于飞机姿态测量时还存在两个方面的不足 [11] :
1) 在飞机高速飞行时,飞机在一秒之内完成好几个动作,而GPS大部分是在一秒左右测量到一次飞机姿态,一秒以内的姿态数据是通过数据内插完成的,在飞机姿态变化比较大的情况下,这种方法的可信度受到限制。
2) 当在飞行过程中GPS天线背离卫星方向时无法接收到有效信号,导致一些关键飞行动作姿态测量失败。特别是飞机在做俯冲、背飞等特定测试动作时,更不容易得到有效的信号,容易导致测量失败。
文章引用
王正祥,刘琴,孙东. 无人机自主导航测绘大比例尺地形图及应用
The Application of UAV Autonomous Navigation Mapping Large Scale Topographic Map[J]. 测绘科学技术, 2017, 05(03): 127-134. http://dx.doi.org/10.12677/GST.2017.53015
参考文献 (References)
- 1. 梁秋幢, 程维明. 超小型飞行器自主导航算法的研究[J]. 无线电工程, 2002, 32(12): 27-30.
- 2. 魏二虎, 黄劲松, 编. GPS测量操作与数据处理[M]. 武汉: 武汉大学出版社, 2004.
- 3. 张祖勋, 苏国中, 张剑清, 等. 基于序列影像的飞机姿态跟踪测量方法研究[J]. 武汉大学学报: 信息科学版, 2004, 29(4): 287-291.
- 4. 张祖勋, 张剑清. 广义点摄影测量及其应用[J]. 武汉大学学报: 信息科学版, 2005, 30(1): 1-5.
- 5. 马明. 用GPS系统测量飞行器的空间姿态[J]. 航空兵器, 2000(1): 37-40.
- 6. 陈永宁. 乌东德水电站移民安置规划1:2000航空摄影测量项目设计书[M]. 云南: 印美图文出版社, 2014.
- 7. 标准化管理委员会. GB/T24356-2009测绘成果质量检查与验收[S]. 北京: 中国标准出版社, 2009.
- 8. 于新瑞, 王石刚, 王高中, 等. 数字图像直线特征的亚像素位置检测[J]. 光学技术, 2004, 30(2): 138-142.
- 9. 标准化管理委员会. CH/Z 3001-2010无人机航摄安全作业基本要求[S]. 北京: 测绘出版社, 2010.
- 10. GB/T23236-2009数字摄影测量空中三角测量规范[S]. 北京: 中国标准出版社, 2009.
- 11. 唐自力, 马彩文, 刘波, 等. 单站光测图像确定空间目标三维姿态田[J]. 光子学报, 2004, 33(12): 1480-1485.