Mine Engineering
Vol.
07
No.
03
(
2019
), Article ID:
31248
,
9
pages
10.12677/ME.2019.73032
Analysis on Obstacles Crossing of Explosion-Proof Crawler Hydraulic Support Carrier
Miao Xie1, Wenbo Hou2, Yuqi Li2, Zheng Li2, Bobo Pei2, Pengfei Wang2, Jia Zhou3
1Liaoning Institute of Technology and Equipment for Exploitation and Utilization of Mineral Resources, Liaoning University of Engineering and Technology, Fuxin Liaoning
2College of Mechanical Engineering, Liaoning University of Engineering and Technology, Fuxin Liaoning
3Shanxi Coal Import and Export Group Lutaishan Coal Industry Co., Ltd., Jincheng Shanxi

Received: Jun. 14th, 2019; accepted: Jul. 5th, 2019; published: Jul. 12th, 2019

ABSTRACT
Tracked vehicle replaces traditional wheeled walking with track and wheel train. It has the advantages of large carrying capacity, strong grip, low noise and turning in situ. At the same time, the use of tracked walking device also increases the contact area with the ground, which makes the bracket vehicle have good driving performance, less damage to the road surface, and strengthens its ability to cross obstacles, and strong adaptability to terrain. Therefore, the research and development of explosion-proof crawler-type hydraulic support carrier has practical significance for underground support transportation. Based on the structure design of the crawler hydraulic carrier, the dynamic model of the crawler hydraulic carrier is established. The mechanical and kinematic characteristics of the crawler hydraulic support carrier are studied by means of virtual prototype simulation and experiment. The main work of this paper is to establish the kinematics analysis model of crawler support carrier and analyze the kinematics characteristics of explosion-proof crawler hydraulic support carrier under obstacle-crossing conditions. This paper studies the movement analysis of explosion-proof crawler hydraulic support carrier in the process of obstacle crossing, and obtains the relationship between driving torque and elevation angle of explosion-proof crawler hydraulic support carrier.
Keywords:Tracked Vehicle, Kinematics Analysis, Dynamics Modeling, Barrier Crossing
防爆履带式液压支架搬运车越障分析
谢苗1,侯文博2,李玉岐2,李政2,裴波波2,王鹏飞2,周甲3
1辽宁工程技术大学,辽宁省高等学校矿产资源开发利用技术及装备研究院,辽宁 阜新
2辽宁工程技术大学,机械工程学院,辽宁 阜新
3山西煤炭进出口集团鹿台山煤业有限公司,山西 晋城
收稿日期:2019年6月14日;录用日期:2019年7月5日;发布日期:2019年7月12日

摘 要
履带车以履带、轮系代替了传统轮式行走,具有承载能力大、抓地力强、噪音低、可原地转弯的优点,同时采用履带式行走装置还增大了与地面的接触面积,使支架车具有良好的行驶性能,对路面产生的伤害小,增强了自身的越障能力,地形适应能力强。因此,研发防爆履带式液压支架搬运车对井下支架搬运运输具有现实意义。本文基于履带式液压搬运车结构设计,对其进行动力学建模,并通过虚拟样机仿真与实验手段,研究了履带式液压支架搬运车的力学与运动特性。本文的研究工作主要有:建立履带支架搬运车运动学分析模型,分析防爆履带式液压支架搬运车越障工况的运动学特性。研究防爆履带式液压支架搬运车在越障过程的运动分析,得出了防爆履带式液压支架搬运车驱动转矩与仰角的关系。
关键词 :履带车,运动学分析,动力学建模,越障

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
我国是煤炭资源丰富的大国,煤炭工业仍将是拉动我国国民经济的一大命脉,煤炭作为主体能源的地位不会改变 [1]。2012~2015年,高端液压支架需求将达12,000~20,000架,接近85~160亿元的市值 [2]。液压支架的运输过程,从其下井到综采工作面,或从一个工作面搬迁到新的工作面,会遇到的工况十分复杂,是煤矿辅助运输系统中的重要组成部分 [3]。在现代化高产高效矿井中,常采用专用支架搬运车来实现支架的搬迁,它具有运行速度快、承载能力好以及重心低等优点,具备液压支架的整体不转载运输能力,提高了运输效率 [4]。该种车辆是特别为提高综合开采大型设备搬迁转场效率而研发的专用载具,是一种矿用装备 [5]。支架搬运车承重部件多是车辆轮胎,这种类型的轮胎材质存在一些缺点,如材质较脆,在受到磕碰时容易撕裂掉块 [6]。除此之外会导致支架搬运车在井下遇到坡度大的路面时动力不足 [7]。较轮式车而言,履带车以橡胶履带、轮系代替了传统轮式行走,具有承载能力大、抓地力强、噪音低、可原地转弯的优点,同时采用履带式行走装置还增大了与地面的接触面积,使支架车具有良好的行驶性能,对路面产生的伤害小,增强了自身的越障能力,地形适应能力强 [8]。因此研究更加自动化的防爆履带式液压支架搬运车的越障性能对井下支架搬运运输具有现实意义。
2. 运动学模型建立
考虑到防爆履带式液压支架搬运车的行走履带左右两侧互相对称,在建立运动学整机坐标系时,选择对称中心为初始坐标系的原点。通过D-H坐标变换方法,将机身的动坐标系建在驱动轮中心上,动坐标系为 ,由图可知前后两轮连线指向从动轮作为X轴,在该平面垂直两轮连线向上作为Y轴,将垂直XOY平面向里作为Z轴。选取机身以外的自然定坐标系作为固定坐标系 ,将以上几个坐标系的联合坐标变化来表示防爆履带式液压支架搬运车在运动过程中的坐标变化 [9]。上文所建立的防爆履带式液压支架搬运车多种坐标系如图1所示。
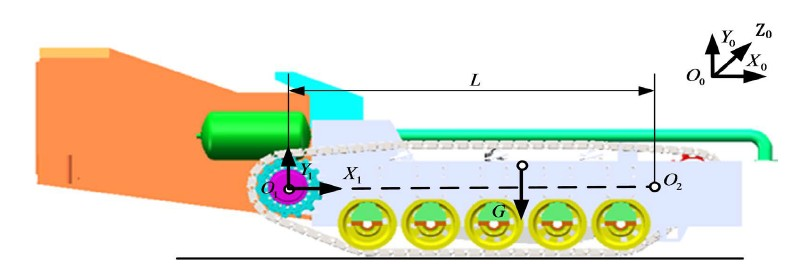
Figure 1. Coordinate system of explosion-proof crawler type hydraulic bracket handling vehicle
图1. 防爆履带式液压支架搬运车各坐标系
选用欧拉角表示防爆履带式液压支架搬运车的空间位置变化,设定绕x轴转动角度为 ,绕y轴转动角度为γ,绕z轴转动角度为α。因此,旋转矩阵可用变换矩阵 表示 [10]。
(2.1)
令机身变动坐标系 的原点相对于固定坐标系的 的坐标为 ,因此可以得到各坐标系之间的齐次变换矩阵:
(2.2)
式中, ——机身绕x轴旋转角;
——机身绕y轴旋转角;
——机身绕z轴旋转角;
——坐标系 的原点在 中的坐标。
从图1观察可得,防爆履带式液压支架搬运车整体的质心G坐标在支架搬运车机身变动坐标系 下的坐标为 ,支架搬运车质心在其本身坐标系下用 表示, ,通过变换计算用 表示质心坐标系与变动坐标系及固定坐标系的坐标的公共关系,计算结果如下:
(2.3)
考虑支架搬运车实际越障时,架搬运车绕Z轴旋转的俯仰角 是对机体翻越障碍的主要影响因素,所以这里在分析时把绕X和Y轴旋转的侧翻角 和转向角 忽略不计,可以得到支架搬运车质心位置在固定坐标系 中精简为如下表达式:
(2.4)
3. 转向运动关系
在防爆履带车辆运行时,履带和车辆两者会出现打滑现象,导致牵引履带的驱动轮线速度和履带带速有速度差,这种情况使履带和地面产生滑动位移。因此,履带的理论速度是其转向极位置的速度(如下示意图2)。
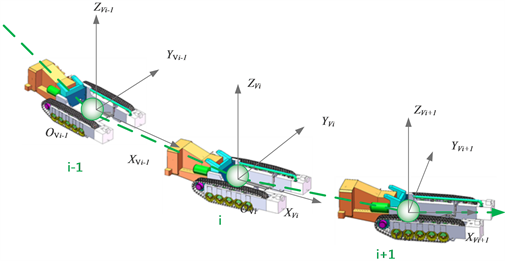
Figure 2. Schematic diagram of the positional relationship of the steering process
图2. 转向过程位置关系示意图
则有:
(3.1)
式中,vi——履带的理论对地速度;
——车辆转动的角速度;
——理论转向半径。
在履带转向时,其实际速度是与地面产生滑移后的速度。这表明,履带的滑移速度为驱动轮轴端面侧向位移大小和车的转向角速度之积,从而推导出履带两侧驱动轮轴的侧向位移为:
(3.2)
式中,vay——滑移速度。
驱动轴的侧向或纵向相对位移值:
(3.3)
操纵履带车辆工作时,难免遇到转弯的情况,通过控制车辆的行驶速度和方向,可以达到车辆以某一半径转弯的目的。转向过程中,驾驶员控制油门、制动、转向等,为了达到一定的转向半径和保证一定的速度,转弯速度等同于转向角速度。下面研究在考虑履带滑移和不考虑履带滑移情况下,转动半径和角速度两者的联系,然后将其当作运动参数对待。
由(3.1)解出考虑履带滑移情况时的相对转弯半径方程:
(3.4)
式中, ——考虑履带滑移情况的相对转弯半径, ;
——不考虑履带滑移情况的相对转弯半径, ;
——履带贴地长度L和履带中心距离B之比, ;
fρ——履带滑移时,相对转弯半径和不考虑履带滑移的相对转弯半径比例系数,即转弯半径修正系数,表达式为:
(3.5)
对于方程(3.4)、(3.5),其使用条件是将履带对地面的重力考虑成集中重力分布,不受转弯半径影响。通过超越方程中的驱、制动力和转弯力矩关系计算出驱动轴的侧向相对位移量 。
当考虑履带滑移条件下,角速度方程为:
(3.6)
式中, ——考虑履带滑移时角速度;
——不考虑履带滑移条件下的角速度, ;
——考虑履带滑移时相对转弯半径和不考虑履带滑移的角速度比例系数,即转弯半径修正系数,表达式为:
(3.7)
速度 情况中,防爆履带搬运车在如图实现转弯过程中的回转半径设为 ,履带宽度距离为B,设每一侧的履带有效与地面接触的长度是L,转向角速度为 ,可以计算得防爆履带式液压支架搬运车左右两侧履带线速度分别为:
(3.8)
式中, 表示右侧履带速度, 表示左侧履带速度,防爆履带式液压支架搬运车中点上的平均速度 。由于防爆履带式液压支架搬运车履带与传动轮是通过齿轮关系连接传动,所以传动轮外侧线速度相同,此时设左右两侧履带轮的角速度分别为 和 ,驱动轮半径R,所以左右两侧的链轮的线速度分别计算如下:
(3.9)
由式(3.8)、式(3.9)得防爆履带式液压支架搬运车的转速为 :
(3.10)
联立消去回转半径 后可以得
(3.11)
其中
(3.12)
通过Matlab求解可得式(3.11)和式(3.12)关系函数图如图3所示,图3(a)体现了搬运车转速与左右链轮转速之差的函数关系,图3(b)体现了搬运车转向半径与左右链轮转速之商的函数关系,则防爆履带式液压支架搬运车转向速度与左右链轮转速之差成正比例函数,同增亦增,同减亦减;防爆履带式液压支架搬运车回转半径与驱动轮角速度之积..成反比例函数,随 增大而减小, 时,回转半径将无穷大,这就是防爆履带式液压支架搬运车直线运动的特殊情况。
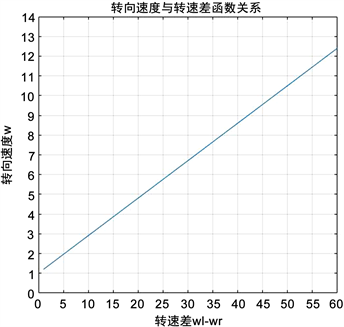 (a) 转向速度与转速差函数关系
(a) 转向速度与转速差函数关系
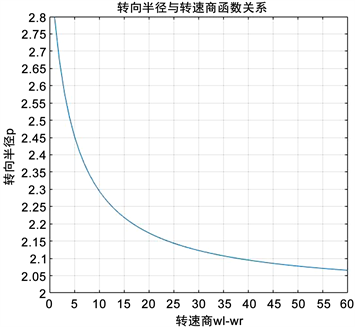 (b) 转向半径与转速商函数关系
(b) 转向半径与转速商函数关系
Figure 3. Relationship between swing speed and radius of gyration
图3. 回转速度、回转半径关系图
4. 防爆履带式液压支架搬运车越障运动分析
防爆履带式液压支架搬运车工作时,主要应该考虑其机体重心是否可以适应障碍物,同时,防爆履带式液压支架搬运车输出转矩受其机体运行时的姿态影响,找到转矩的变化规律,研究其翻越障碍时履带的位姿形态,建立其位姿调整的动态模型。下图4为防爆履带式液压支架搬运车从接触障碍物到完全越过的过程示意图。
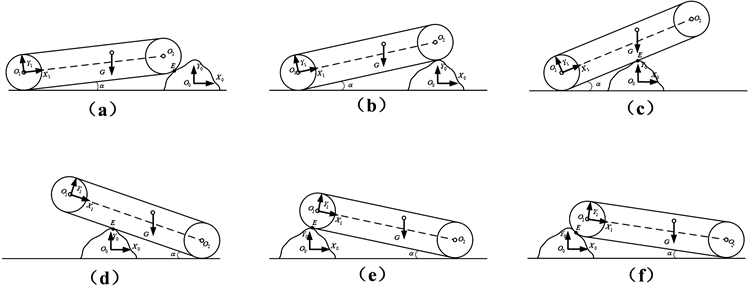
Figure 4. Obstacle-crossing process of explosion-proof crawler type hydraulic bracket handling vehicle
图4. 防爆履带式液压支架搬运车越障过程
机身接触障碍物姿态即为防爆履带式液压支架搬运车通过调整两侧履带姿态,将防爆履带式液压支架搬运车本体引导轮抬升,防爆履带式液压支架搬运车驱动轮着地时的姿态。如图5为防爆履带式液压支架搬运车受力分析图。
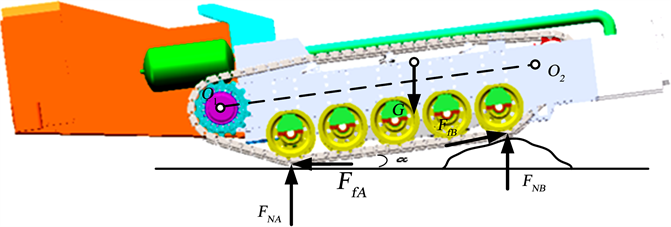
Figure 5. Stress of explosion-proof crawler type hydraulic bracket handling vehicle
图5. 防爆履带式液压支架搬运车受力情况
根据如图4所示的受力分析,由力矩平衡原理,整理可得:
(4.1)
式中, ——搬运车受到地面的摩擦力;
——搬运车受到地面的支撑力;
G——搬运车本体结构重力;
T——输出转矩;
——摩擦系数,取 ;
——搬运车仰角,其中规定防爆履带式液压支架搬运车逆时针旋转为正。
整理式(4.1)可以得到履带搬运车输出电机输出转矩函数:
(4.2)
其中M表示机身的质量;L表示机身引导轮和驱动轮的中心距; 表示机身的质心位置;R表
示防爆履带式液压支架搬运车轮半径。绘制防爆履带式液压支架搬运车驱动转矩随防爆履带式液压支架搬运车仰角变化曲线图。
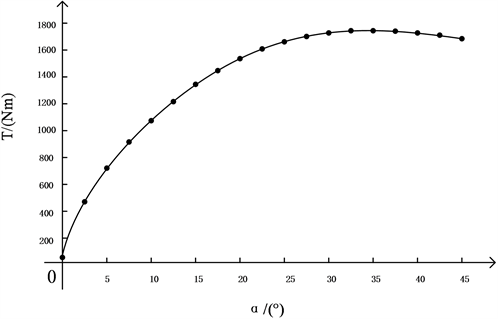
Figure 6. Curve of driving torque variation with elevation angle of bracket carrier
图6. 驱动转矩随支架搬运车仰角变化曲线图
通过对图6分析可得,防爆履带式液压支架搬运车驱动转矩受仰角影响,即仰角越大,其驱动转矩越大。其中防爆履带式液压支架搬运车本体处于仰角 时,取得最大转矩值, 。通过分析,驱动电机选用最大输出力矩达1740 N∙m的300 KW减速电机,通过图6所示的履带需求力矩关系可知,能够达到防爆履带式液压支架搬运车翻越障碍物时的需求。
5. 结论
防爆履带式液压支架搬运车在煤矿井下实践应用中,其运行是否稳定受防爆履带式液压支架搬运车的仰角影响,仰角越大,防爆履带式液压支架搬运车后翻越严重,将会损坏防爆履带式液压支架搬运车车体和液压支架,出现严重的安全隐患。因此对煤矿井下防爆履带式液压支架搬运车运行稳定性进行研究势在必行。本文在研究防爆履带式液压支架搬运车失稳问题时,具体分析了防爆履带式液压支架搬运车车体重心受其仰角影响,而且搬运车后翻时有着地区域,其仰角越大,车体重心越靠近防爆履带式液压支架搬运车着地区域的临界点。
文章引用
谢 苗,侯文博,李玉岐,李 政,裴波波,王鹏飞,周 甲. 防爆履带式液压支架搬运车越障分析
Analysis on Obstacles Crossing of Explosion-Proof Crawler Hydraulic Support Carrier[J]. 矿山工程, 2019, 07(03): 225-233. https://doi.org/10.12677/ME.2019.73032
参考文献
- 1. 姜泽. 煤矿综合机械化采煤工艺[J]. 矿业装备, 2018(4): 72-73.
- 2. 蔡毅. 液压支架分析优化技术研究[D]: [硕士学位论文]. 武汉: 华中科技大学, 2012.
- 3. 李博. 通用型支架搬运车方案设计及液压同步提升系统研究[D]: [硕士学位论文]. 太原: 中北大学, 2016.
- 4. 张波. WC50Y大坡度支架搬运车的研制及应用[J]. 陕西煤炭, 2016, 35(6): 79-82.
- 5. 张国栋. 煤矿井下支架搬运车的发展趋势及合理选用[J]. 煤矿机械, 2012, 33(8): 196-197.
- 6. 姚志功. 影响煤矿支架搬运车轮胎损耗的因素分析及预防措施[J]. 煤炭工程, 2016, 48(7): 132-133.
- 7. 姚志功. 煤矿铲板式支架搬运车超载使用的危害及对策[J]. 中国煤炭, 2015, 41(5): 91-93.
- 8. 姚禹. 基于履带-地面耦合系统的低速履带车辆通过性研究[D]: [博士学位论文]. 长春: 吉林大学, 2016.
- 9. 胡庆龙. 关节履带式移动机器人控制系统设计及爬楼梯分析[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2010.
- 10. 王伟东. 面向复杂地面环境的作业型履带式移动机器人研究[D]: [博士学位论文]. 哈尔滨: 哈尔滨工业大学, 2009.