Modeling and Simulation
Vol.
13
No.
01
(
2024
), Article ID:
79756
,
10
pages
10.12677/MOS.2024.131053
基于CFD的风机叶片修复机器人结构设计及 优化
王毅1,王靖1,周荣成1,潘捷1,方宇2,张海峰2,沙玲2,范狄庆2,刘景君2
1上海东海风力发电有限公司,上海
2上海工程技术大学机械与汽车工程学院,上海
收稿日期:2023年11月29日;录用日期:2023年12月25日;发布日期:2024年1月24日

摘要
风场对风机叶片修复机器人高空作业时的稳定性产生直接影响。本文提出了一种面向高空作业的风机叶片修复机器人结构设计方案,并根据风场分析结果对其部分结构进行优化。首先建立了修复机器人的三维结构模型。其次根据高空修复作业环境,结合CFD软件对修复机器人在不同风场下的力学特性进行有限元分析,得出风场对修复机器人吸附稳定性影响较大的区域在吸盘连杆处。最后根据上述分析结果针对修复机器人主体及吸盘进行优化设计和仿真分析。通过对比优化前后的分析结果,可以证实机器人主体及吸盘优化结果的有效性和可靠性,为风机叶片修复机器人设计提供理论依据。
关键词
风机叶片,修复机器人,有限元分析,优化设计

Structural Design and Optimization of Fan Blade Repair Robot Based on CFD
Yi Wang1, Jing Wang1, Rongcheng Zhou1, Jie Pan1, Yu Fang2, Haifeng Zhang2, Ling Sha2, Diqing Fan2, Jingjun Liu2
1Shanghai Donghai Wind Power Co., Ltd., Shanghai
2School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai
Received: Nov. 29th, 2023; accepted: Dec. 25th, 2023; published: Jan. 24th, 2024

ABSTRACT
The wind field has a direct influence on the stability of fan blade repair robot when working at high altitude. In this paper, a structural design scheme of fan blade repair robot for high-altitude operation is proposed, and some of its structures are optimized according to the wind field analysis results. Firstly, the three-dimensional structure model of the repair robot is established. Secondly, according to the high-altitude repair working environment, the mechanical characteristics of the repair robot under different wind fields were analyzed by finite element method combined with CFD software, and it was concluded that the area where the wind field had a great influence on the adsorption stability of the repair robot was at the connecting rod of the sucker. Finally, according to the above analysis results, the optimization design and simulation analysis are carried out for the main body of the repair robot and the suction cup. By comparing the analysis results before and after optimization, the validity and reliability of the optimization results of the robot body and the suction cup can be verified, and the theoretical basis for the design of the fan blade repair robot can be provided.
Keywords:Fan Blade, Repair Robot, Finite Element Analysis, Optimal Design

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着全球对于清洁能源需求的迅速增长,风能发电作为最具潜力的可再生能源之一,已经成为了现代能源生产中不可或缺的重要组成部分 [1] 。中国风电产业发展迅速,目前拥有全球最大的风电装机容量和风电发电量。截至2022年,中国已经建成的风电装机容量超过了2.3亿千瓦,占全球总装机容量的38%左右 [2] 。叶片作为风力发电机的关键部件,其安全可靠的工作是整个风电机组能够稳定运行的核心。然而,由于风电机组受实际工作环境如风沙、低温结冰等问题的影响,表面易出现裂纹、点蚀、涂层破损等损伤,进而使得叶片气动性能下降、产生噪音和振动等问题 [3] 。并且叶片损伤处在雨雪作用后极易受到闪电雷击的破坏,连续作用下造成叶片破裂或断裂酿成叶片事故 [4] [5] [6] 。因此,对风机叶片及时有效的检测和修复是风电机组运行维护的重中之重。
当前,国内外学者致力于研究风机叶片损伤检测机器人以代替传统人工检测,相关学者研发出了框架式机器人、轮式及履带式机器人和无人机检测等方法 [7] 。最早的框架式风机叶片检测机器人是德国Fraunhofer研究所研制出的RIWEA机器人 [8] ,其结构主要包括机身框架,升降装置和检测装置。机身框架套在风机叶片上,通过绳索与升降装置实现机器人整体移动,其框架前端可以打开,从而能够在不同的风机叶片上进行检测。
王斌锐等人 [9] 设计了一种应用于曲面攀爬的真空吸附式双足机器人,主要结构包括三自由度旋转装置以及吸附足装置。机器人利用电机带动旋转装置,结合两吸附足不断交替吸附,实现双足机器人在曲面攀爬。GE公司 [10] 研发了一种风扇式履带攀爬机器人,主要结构包括吸附装置,移动机构以及机械臂。其通过吸附装置中的离心式风扇高速转动产生负压,从而使机器人稳定吸附在风机叶片表面,通过履带移动机构实现整体移动。Jung等人 [11] 提出了无人机检测风机叶片方式。机器人利用无人机携带检测装置,通过4个旋翼产生的推力使装置缓慢靠近风机叶片,最后停靠在风机叶片表面。目前,应用于风机叶片的机器人多数是检测机器人,没有修复机器人应用在风机叶片维护领域。
本文根据项目实际需求,在上述风机叶片检测机器人结构设计的基础上,提出了集损伤检测和缺陷修复于一体的修复机器人,并对其进行流场力学特性分析,进而对部分结构进行优化设计。
2. 结构设计
2.1. 整机结构及工作流程
修复机器人整机结构如图1所示,主要包括机器人主体,吸附装置和机械臂。相比于检测机器人,本文设计的风机叶片修复机器人需要具有更高的稳定性,更好的负载能力以及更强的抗干扰能力。

Figure 1. Machine structure diagram
图1. 整机结构图
修复机器人工作方式与丹麦Rope Robotics公司的风机叶片机器人类似,如图2所示 [12] 。首先利用绳索将修复机器人整机升吊至风机叶片上,其次控制机械臂上的检测设备对风机叶片进行巡检,而后通过绳索结合吸附装置将修复机器人移动至叶片缺陷附近,控制机械臂更换不同修复工具,实现对风机叶片表面缺陷修复。

Figure 2. Working diagram of Rope Robotics in Denmark
图2. 丹麦Rope Robotics机器人工作图
2.2. 机器人主体及机械臂
机器人主体包括升降装置,修复工具库,电源,气源装置,控制柜等,结构如图3所示。绕绳机构采用对称布置的方式,使得修复机器人在升降过程中受力均匀,避免出现倾覆,扭转等情况。修复机器人带有机械臂,机器人在升吊到空中后,机械臂携带检测设备对风机叶片表面进行检测,为修复作业提供相关参数。修复工具库用来放置修复工具,机械臂可以通过快换装置更换修复工具,完成风机叶片表面自动化修复的一系列工艺流程。

Figure 3. Internal structure of the robot body
图3. 机器人主体内部结构图
2.3. 吸附装置
吸附装置是修复机器人重要的装置,机器人在正常作业过程中可能出现两种危险状态:机器人本体从吸附面上滑落或机器人本体在吸附面上发生倾覆。因此需要对吸盘的吸附力进行分析计算 [13] 。
本文所设计的修复机器人吸附装置采用真空吸附的方式,将8个海绵吸盘,分为两组,分别布置在机器人底板两端。真空吸附的原理是通过真空泵等排气装置排出吸盘内空气,形成真空,利用大气压强大于吸盘内空气压强,将吸盘吸附在物体表面 [14] [15] 。
2.3.1. 吸附力分析
修复机器人工作时的极限工况为真空吸盘处于垂直位置,此时的受力简图如图4所示。其中为机器人整体所受重力,FN为机器人给吸附面的压力,Ff为机器人所受到的摩擦力。

Figure 4. Schematic diagram of robot stress analysis
图4. 机器人受力分析示意图
由受力分析可知,若要修复机器人在工作时不产生滑动或倾覆,则机器人所受重力要不大于所受摩擦力,即:
式中为摩擦系数,根据实际风机叶片的表面粗糙度,取 为0.65。本文设计的修复机器人依据项目要求,整机重量为200 kg,代入上述公式可得,机器人给吸附面的压力应不小于3015.38 N。由于机器人给吸附面的压力由吸盘提供,即为吸盘的吸附力,故吸盘的吸附力要不小于3015.38 N。
2.3.2. 理论吸附力计算
吸盘的理论吸附力与吸盘的真空度和吸盘的有效吸附面积有关。具有n个吸盘的吸附力公式如下:
式中 为吸附力; 为吸盘内部初始真空度,默认为标准大气压; 为吸盘真空度; 为吸盘有效半径; 为安全系数,根据实际工况,取2.5。本文选用的吸盘有效直径为120 mm,根据项目实际工况,设置真空度为−85 kPa,代入到公式(2)可得,修复机器人吸附装置的理论吸附力为3686.97 N,单个吸盘能够承受载荷力约为460.87 N。
2.3.3. 实验验证
为验证理论吸附力计算的准确性,对所选吸盘进行横向承载载荷实验。实验相关参数如表1所示,砝码共有两种,一种为5 kg,一种为10 kg;海绵吸盘直径为160 mm,有效吸附直径为120 mm;压力传感器为SMC公司的ZSE30A-01-N,额定量程为−101 kPa~0;真空泵额定功率为160 W,流量为40 L/min。

Table 1. Experimental parameters of adsorption force
表1. 吸附力实验参数
实验针对不同真空度下吸盘所能承载的载荷进行实验,结果如表2所示。
Table 2. Experimental results of adsorption force
表2. 吸附力实验结果
通过实验得出:在真空度为−85 kPa时,单个海绵吸盘所能承受的横向承载在45~50 kg之间,与理论计算的结果基本相符。上述实验,验证了理论吸附力计算的正确性,可以得出所选吸盘能够满足修复机器人稳定吸附的要求。
3. 流场特性分析
3.1. 整机流场仿真
修复机器人在高空作业过程中,风场会对机器人产生作用力,干扰机器人的稳定性。因此,需要分析修复机器人在风场作用下的状态和受力情况,以此对部分结构进行优化设计。
根据实际情况,在不影响计算精度的前提下,对修复机器人整机结构进行简化,以提高仿真模拟的效率。以机器人上升过程中的移动方向为X轴正向建立坐标系,规定垂直于X轴正向的表面为正面,垂直于Y轴负向的表面为侧面,如图5所示。利用SpaceClaim软件对简化后的模型进行前处理。采用目前运用比较普遍的混合网格划分的方法,提高仿真模拟的准确性 [16] 。
依据叶片作业的实际工况,本文研究在五级风速(8 m/s~10.7 m/s)条件下,侧面和正面两个方向的风场入口对修复机器人的影响。在模拟中,为使结果更加准确,将入口边界条件的设置为速度,出口边界条件设定为压力。选择使用Standard 湍流模型,并将湍流动能 和湍流耗散率 均设置为0.5。采用Fluent求解器,使用分离隐式求解器、稳态模式和二阶中心差分格式。在求解过程中,使用SIMPLE算法,并通过显示残差的变化来判断求解结果是否收敛。
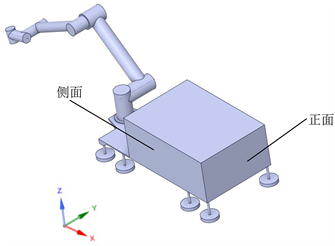
Figure 5. Simplified model of repair robot
图5. 修复机器人简化模型图
3.2. 特性分析
3.2.1. 压力分布
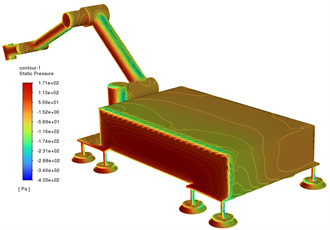
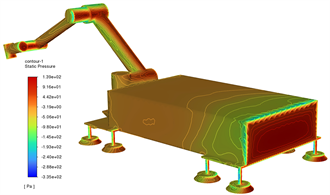
当风场入口为侧面时,机器人表面的压力曲线图如图6所示,机器人主体和机械臂会受到200 Pa左右的正压,在气体流经机器人底部的吸盘连杆时,产生了边界层流动分离现象,致使部分气体回流,从而在吸盘连杆背风面形成部分负压区,负压最高可达560 Pa左右。
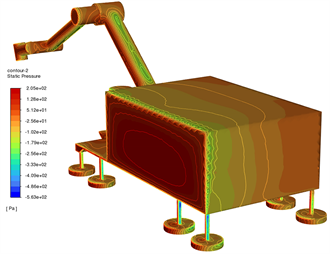
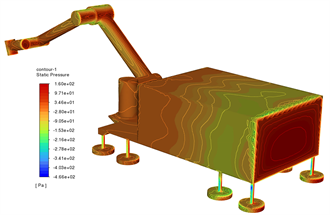
当风场入口为正面时,机器人表面的压力曲线图如图7所示,与侧面进风的情况类似,机器人主体会受到160 Pa左右的正压,在底板下边缘处,气体在流经吸盘连杆时产生回流,在连杆背风面形成部分负压区,负压值最高为466 Pa左右。
由上述压力云图可知,压力差较大的区域集中在机器人主体及吸盘连杆处,正负压差值可达760 Pa,对修复机器人稳定性产生很大影响,为提高修复机器人在风场中得稳定性,需要针对机器人主体及吸盘结构进行优化设计。

Figure 6. Cloud image of side inlet air pressure of robot
图6. 机器人侧面进风压力云图

Figure 7. Cloud image of robot front air inlet pressure
图7. 机器人正面进风压力云图
3.2.2. 流场特性研究
侧面进风时吸盘连杆中心面的风速矢量图,如图8所示。气体在流经吸盘连杆时会产生边界层流动分离现象,当气体通过连杆表面时,由于顺压梯度的作用,气体流速增大,最高达到了31 m/s,远超设定的五级风速。而后在逆压梯度的作用下,气体流速逐渐减小,直至反向流动,由于气体主体部分无法反向,它会从边界层开始分离,造成流动分离,并且会在吸盘连杆后方形成涡流,从而对吸盘产生作用力。
正面进风时吸盘连杆中心面的风速矢量图,如图9所示,同样会产生边界层流动分离现象,相较于侧面进风,正面进风时,气体的流速增长相对更缓慢,最高流速在29 m/s左右,但在吸盘连杆后方产生的涡流更多,气体流动情况更加复杂,对吸盘会产生更多方向的作用力。

Figure 8. Wind velocity vector diagram of the center surface of the side suction cup connecting rod
图8. 侧面进风吸盘连杆中心面风速矢量图
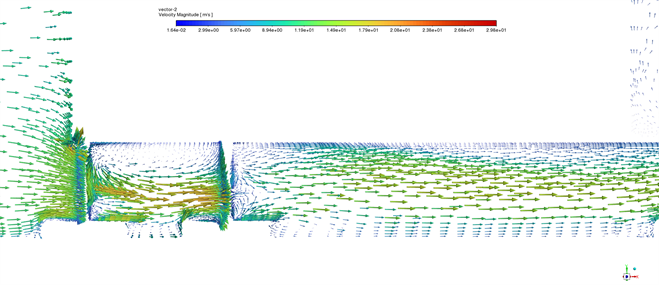
Figure 9. Wind velocity vector diagram of the center surface of the suction cup connecting rod
图9. 正面进风吸盘连杆中心面风速矢量图
4. 优化设计
4.1. 结构优化
根据上述仿真结果可知,当风场作用在修复机器人主体上时,会对机器人产生作用力,进而对吸盘产生倾覆力矩。倾覆力矩的大小与作用力大小、机器人整机重心到吸盘吸附面高度有关,在风速不变的前提下,降低机器人整机高度能够有效减少倾覆力矩的大小,从而降低风场对机器人的影响。
针对机器人主体,依据项目实际需求,在不影响现有功能的前提下,选用更加小型化,轻量化的器件,对内部进行重新排布,降低机器人主体高度;针对吸盘,在保证吸盘有效吸附面积的情况下,选用尺寸更合适的硅胶吸盘。
4.2. 分析验证
对优化后的修复机器人在风场中受到的压力分布进行验证,在五级风速下机器人在侧面进风的压力曲线图,如图10所示;正面进风的压力曲线图,如图11所示。
 (a) 优化前 (b) 优化后
(a) 优化前 (b) 优化后
Figure 10. Side air inlet pressure cloud image of robot optimization model
图10. 机器人模型优化前后侧面进风压力对比
 (a) 优化前 (b) 优化后
(a) 优化前 (b) 优化后
Figure 11. Front air inlet pressure cloud image of robot optimization model
图11. 机器人优化模型正面进风压力云图
通过上述云图可以看出,侧面进风时,优化后的机器人所受的正压约为170 Pa,吸盘连杆所受负压约为410 Pa,与优化前相比,所受正压降低16.6%,所受负压降低27.5%。正面进风时,优化后的机器人所受的正压约为139 Pa,吸盘连杆所受负压约为335 Pa,与优化前相比,所受正压降低13.1%,所受负压降低28.1%。经过优化,修复机器人在风场中受到的压力明显减小,有效提高了机器人在吸附面的稳定性。
5. 结论
1) 本文以实际项目为背景,提出一种风机叶片修复机器人设计方案,建立了修复机器人整机模型。
2) 采用理论分析和仿真相结合的方式,研究修复机器人在风场作用下的受力情况,得出倾覆力矩大小与风场对机器人的作用力以及机器人整机重心到吸盘吸附面的高度有关。
3) 根据仿真分析结果对修复机器人结构进行优化设计,将机器人整体高度由580 mm降低至390 mm。
4) 进行对比分析验证,结果显示侧面进风时机器人所受正负压分别减小16.6%和27.5%,正面进风时正负压分别减小13.1%和28.1%,证明了优化模型的可靠性高于原始模型。
文章引用
王 毅,王 靖,周荣成,潘 捷,方 宇,张海峰,沙 玲,范狄庆,刘景君. 基于CFD的风机叶片修复机器人结构设计及优化
Structural Design and Optimization of Fan Blade Repair Robot Based on CFD[J]. 建模与仿真, 2024, 13(01): 539-548. https://doi.org/10.12677/MOS.2024.131053
参考文献
- 1. 何李丽, 张恒. “双碳”目标下我国能源转型路径[J]. 上海节能, 2023(9): 1285-1294.
- 2. 张永, 刘召, 黄超. 挟沙风作用下风力机叶片涂层冲蚀磨损研究进展[J]. 新能源进展, 2015, 3(5): 331-335.
- 3. 王一博, 韩巧, 张曦文, 等. 基于机器视觉的风力机叶片损伤检测系统[J]. 科学技术与工程, 2022, 22(12): 4879-4886.
- 4. 李德顺, 陈霞, 李银然, 郭兴铎, 王亚娥. 风力机翼型风沙冲蚀磨损演化过程研究[J]. 甘肃科学学报, 2020, 32(5): 63-68+87.
- 5. 周黎明. 沿海地区动调轴流风机停运期间叶片卡涩问题分析及解决[J]. 风机技术, 2015(5): 87-90.
- 6. Herman, S. (2013) Review of Aerody-namics for Wind Turbines. IEEE Wind Energy, 6, 203-211. https://doi.org/10.1002/we.97
- 7. 李响, 刘书海, 肖华平, 刘浩. 风电叶片检测机器人设计与运动仿真研究[J]. 现代制造工程, 2023(4): 51-58.
- 8. Elkmann, N., Felsch, T. and Forster, T. (2010) Robot for Rotor Blade Inspection. IEEE 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, 5-7 October 2010, 1-5. https://doi.org/10.1109/CARPI.2010.5624444
- 9. 王斌锐, 冯伟博, 骆浩华, 等. 曲面上双足三自由度爬壁机器人设计与稳定性分析[J]. 机器人, 2014, 36(3): 349-354.
- 10. Feng, Z., Xiao, H. and Zhang, Y. (2022) Distributed Drive Elec-tric Bus Handling Stability Control Based on Lyapunov Theory and Sliding Mode Control. Actuators, 11, Article 85. https://doi.org/10.3390/act11030085
- 11. Jung, S., Shin, J., Myeong, W., et al. (2015) Mechanism and System Design of MAV (Micro Aerial Vehicle)-Type Wall-Climbing Robot for Inspection of Wind Blades and Non-Flat Surfaces. 2015 15th In-ternational Conference on Control, Automation and Systems (ICCAS), Busan, 13-16 October 2015, 1757-1761. https://doi.org/10.1109/ICCAS.2015.7364634
- 12. 花放. 汉堡国际风能展首次设立氢能论坛[N]. 人民日报, 2022-10-19(015).
- 13. 高娜娜, 黄欢, 李林琛. 真空吸附式爬壁机器人本体受力分析与仿真[J]. 北京工业职业技术学院学报, 2022, 21(3): 1-5.
- 14. 刘永平, 张世一, 蔺卡宾. 玻璃幕墙清洗机器人爬壁运动控制系统设计[J]. 机械与电子, 2015(9): 72-75.
- 15. 王妹婷, 齐永锋, 陆柳延, 等. 双向清洗机器人玻璃幕墙完全遍历路径规划[J]. 机械设计与制造, 2013(11): 211-213.
- 16. 刘振东, 彭涛, 程佳勇, 等. 车顶行李架加载装置的气动力分析与试验[J]. 汽车实用技术, 2020(5): 133-135.