Pure Mathematics
Vol.
09
No.
09
(
2019
), Article ID:
33051
,
17
pages
10.12677/PM.2019.99130
The Proof of the Algorithm of Euler Line with Orthogonal Radius of 4 Spheres as 4 Variables
—Application of Pythagorean Theorem of Four Dimensional Volume (Formula 4)
Guowei Cai
Shanghai Huimei Property Co., Ltd., Shanghai

Received: Oct. 26th, 2019; accepted: Nov. 13th, 2019; published: Nov. 20th, 2019

ABSTRACT
In Euclidean 3D coordinate system, the vertical tetrahedron composed of orthogonal four spherical centers has its own isomorphic formulas according to the four common spherical radius of Pythagorean four states, the coordinates of spherical centers and the distance between the spherical centers and the vertical centers.
Keywords:Volume Pythagorean Theorem, Orthocentric Tetrahedron, Barycenter Sphere, Orthocenter Sphere, Circumscribed Sphere, 8-Point Sphere, 20-Point Sphere, 12-Point Sphere, 6-Point Sphere, Euler Line, Algorithm
证明以正交4球半径为4元数欧拉线 的算法
——四维体积勾股定理的应用(公式四)
蔡国伟
上海汇美房产有限公司,上海
收稿日期:2019年10月26日;录用日期:2019年11月13日;发布日期:2019年11月20日

摘 要
正交4球心组成的垂心四面体,在欧氏3D坐标系中,仅用四球半径,按勾股4态的4个共球半径、球心坐标、球心距垂心间距均有各自的同构公式。
关键词 :体积勾股定理,垂心四面体,重心球,垂心球,外接球,8点球,20点球,12点球,6点球,欧拉线,算法

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
4球正交,球心间的垂心四面体构成勾股4态 [1] 的4个球心点(球)、6个两球间连线(勾股定理)、4个3球心所围面(面积勾股定理 [2] )、1个4球心所围体(四维体积勾股定理 [3] )均有各自的重心和垂心。这15组重心垂心按勾股4态,用4球半径表达的4种共球半径、球心坐标和欧拉线 [4] 间距关系如何?
2. 证明勾股四态的4个共球半径,球心坐标,欧拉线间距 均存在同构公式
4球正交,存在勾股4态,点、线、面、体4个共球,它们交4垂线同时交同态重心和垂心。4个共球球心与垂心共5点共线,即为垂心四面体的欧拉线,4个共球半径以及球心的坐标具有各自的同构的四元数公式。证明如下(为精简起见,各15组重心和垂心代数坐标符号均沿用“重心距离公式” [5]、“垂心距离公式” [6] 中所设)。
2.1. 按勾股4态的4个同态重心垂心共球半径及其球心坐标有 各自的同构公式
2.1.1. 勾股4态的4个同态重心垂心共球半径平方
的同构公式
定义:正交4球形成的勾股4态,仅用4球半径表达其存在4个同态重心垂心共球半径的平方等于维数平方分子4个重心球半径的平方与垂心球半径平方与维数减2的平方积之差。其公式为:
(1)
这里:
;重心球平方:
;垂心球平方:
。
2.1.2. 勾股4态的4个同态重心垂心共球球心坐标O1/n的同构公式 (即:欧拉线)
定义:勾股4态存在4个共球球心与1点垂心计5点共线的欧拉线,4共球坐标有同构公式为:2倍维数分子4球心坐标和与2倍的垂心坐标与2减维数积之差。其公式为:
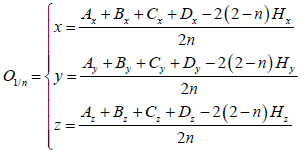 (2)
(2)
这里
的维数;
为共球心坐标;
为4球心,H为垂心;下标
为分坐标。
2.1.3. 勾股4态的4个同态重心垂心共球球心坐标O1/n与垂心H间距的同构公式(即:欧拉线)
定义:正交4球形成的勾股4态,存在4个同态重心垂心共球球心坐标距垂心距离为算术平均数。各共球与垂心间距得平方等于维数平方分子4与重心球半径与垂心球半径的平方差的积。其公式两边开方后为:
(3)
这里:
;重心球平方:
;垂心球平方:
。
例:
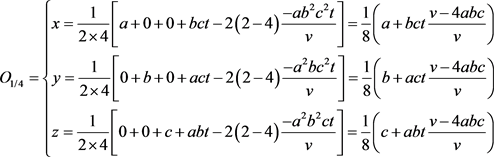
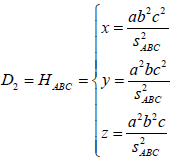
· 一维点态8点共球半径、球心坐标及距垂心距离:(8点共球在垂心四面体中为外接球。其半径的平方等于4球心至垂心距离平方和的四分之一,也等于4个重心球半径平方与垂心球半径平方差)。
其8点共球半径的平方,将
代入公式(1)为:
(4)
其8点共球球心坐标,将
代入公式(2)为:
(5)
这里:
, 本文下同。
本文下同。
其8点共球球心坐标与垂心H距离,将
代入公式(3)为:
(6)
· 二维线态20点共球半径、球心坐标及距垂心距离:(垂心四面体中交4垂线8点以及交4球心6条连线12点,总计20点共球,其半径和球心坐标同构重心球半径和重心坐标)。
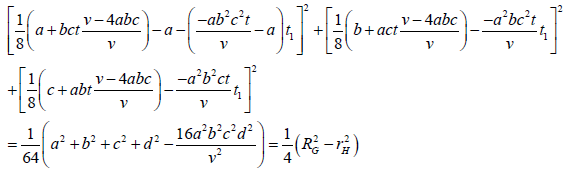
其20点共球半径的平方,将
代入公式(1)为:
 (7)
(7)
其20点共球球心坐标,将
代入公式(2)为:
(8)
其20点共球球心坐标与垂心H距离,将
代入公式(3)为:
(9)
· 三维面态12点共球半径、球心坐标及距垂心距离:(垂心四面体中为4垂线8点4平面重心4点,总计12点共球;半径是8点共球的三分之一)。
其12点共球半径的平方,将
代入公式(1)为:
(10)
其12点共球球心坐标,将
代入公式(2)为:
(11)
其12点共球球心坐标与垂心H距离,将
代入公式(3)为:
(12)
· 四维体态6点共球半径、球心坐标及距垂心距离:(垂心四面体中4垂线5点,其中垂心为4垂线交点,体重心1点,总计为6点共球)。
其6点共球半径的平方,将
n = 4 代入公式(1)为:
(13)
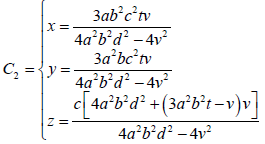
其6点共球球心坐标,将
代入公式(2)为:
 (14)
(14)
其6点共球球心坐标与垂心H距离,将
n = 4 代入公式(3)为:
(15)
上述关系见表1如下。

Table 1. List of 5 points collinear coordinates of Euler line and Pythagoras four states and radius of 4 common spheres
表1. 欧拉线5点共线坐标及其勾股4态4共球半径一览表
表内:这里:
;重心球平方:
;垂心球平方:
;
, 。
。
2.2. 验证勾股4态4共球半径、球心坐标及算术平均数的欧拉线
2.2.1. 验证勾股4态的4点同构的坐标间距为欧拉线算术平均数
假设上述公式正确:用2点距离公式验算欧拉线之间的距离如下:
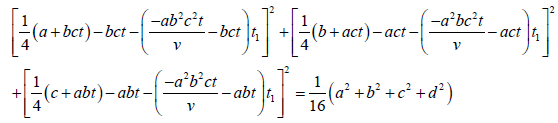
· 勾股点态8点共球,球心O点至垂心H点至其间距用2点间距公式为:
两边开方公式(16)等于公式(6)为:
(16)
· 勾股线态20点共球球心
 重心点,根据同态垂心与重心间距的平方,可以不用坐标,其间距等于重心球与垂心球半径的平方差。
,
重心点,根据同态垂心与重心间距的平方,可以不用坐标,其间距等于重心球与垂心球半径的平方差。
,
两边开方公式(17)等于公式(9)为:
(17)
· 勾股面态12点共球球心
至垂心H点间距,用2点坐标距离公式为;
两边开方公式(18)等于公式(12)为:
(18)
· 勾股体态6点共球球心
至垂心H点,用2点坐标距离公式为;
两边开方公式(19)等于公式(15)为:
(19)
根据公式(16)、(17)、(18)、(19)结果,验证了4点为垂心至8点共球球心2点共线,其间距为该2点间距为欧拉线算术平均数。
2.2.2. 验证勾股点态重心垂心共球半径及球心坐标(即垂心四面体的外接球 [7],或称垂心四面体8点共球)
证明了8点共球球面交4垂线共8点共球,其中:8点共球交正交4球心,该球心与4球重心、4球垂心共点,因此该共球在这里称“勾股点态一维重心垂心共球”,共球半径的平方等于正交4球心至垂心距离的平方和的四分之一,也等于重心球半径与垂心球半径的平方差的4倍。
假设公式(4),公式(5)成立,勾股点态重心垂心共球半径及球心坐标见表1,将4垂线参数方程公式(20)与8点共球半径和球心的球面方程联立公式(21),即得4垂线交该球面8点,其中4点为正交4球的球心、与4球重心和垂心共点:
验证如下:
例:
· 过A点和垂心H点2点的垂线参数方程为:
(20)
8点共球半径的平方见:公式(4);球心为O见:公式(5),立球面方程为:将公式(20)代入公式(16)左右式相减:
(21)
得
将
代入公式(20)得8点共球与过A点垂线的2交点坐标为:
 与
与
同理我们可得:
· 过B点和垂心H点2点的垂线参数方程为:
(22)
代入共球球面方程:
 (23)
(23)
得
将参数
代回公式(22)过B点垂线2交点坐标为:
与
· 过C点和垂心H点2点的垂线参数方程为:
(24)
代入共球球面方程:
(25)
得
将参数
代回公式(24)过C点垂线2交点坐标为:
与
· 过D点和垂心H点2点的垂线参数方程为:
(26)
代入共球球面方程:
(27)
得
将参数
代回公式(26)过D点垂线2交点坐标为:
与
因此,验证8点共球半径的平方公式(4),以及8点共球球心坐标公式(5)成立。且证明了8点共球球面交4垂线共8点共球,其中:8点共球交正交4球心,该球心与4球重心、4球垂心共点,因此该共球在这里称“勾股点态一维重心垂心共球”,共球半径的平方等于正交4球心至垂心距离的平方和的四分之一,也等于重心球半径与垂心球半径的平方差的4倍。
2.2.3. 验证勾股线态20点共球半径及球心坐标(共球面与6棱和4垂线各交2点)
证明“勾股线态二维重心垂心共球”球面交4垂线以及6棱共20点共球,20点共球球心为四维重心;共球半径的平方等于四维重心球半径的平方。
假设公式(7)、公式(8)成立,勾股线态重心垂心共球半径及球心坐标见表1,将4垂线参数方程与20点共球半径和球心的球面方程联立,即得4垂线交该球面8点,同理,将6棱线参数方程与20点共球球面方程联立,可得共球球面交6棱,各棱重心垂心2点,合计12点共球交点,合计20点共球。
验证1:4垂线与该共球交8点:
例:
· 过A点与H垂心的垂线的参数方程见:公式(20)代入公式(28)
20点共球球面方程为:
(28)
将得到的参数:
代入过A点垂线参数方程
公式(20)得2交点为:
和
· 过B点与H垂心的垂线的参数方程见:公式(22)代入公式(29)
20点共球球面方程为:
(29)
将得到的参数:
代入过B点垂线参数方程公
式(22)得2交点为:
和
· 过C点与H垂心的垂线的参数方程见:公式(24)代入公式(30)
20点共球球面方程为:
(30)
将得到的参数:
代入过C点垂线参数方程公
式(24)得2交点为:
和
· 过D点与H垂心的垂线的参数方程见:公式(26)代入公式(31)
20点共球球面方程为:
 (31)
(31)
将得到的参数:
代入过D点垂线参数方程
公式(26)得2交点为:
和
验证2:6棱重心与该共球交6点:
· 过A点与B点的AB棱的直线的参数方程为:
(32)
将直线参数公式(32)代入20点共球球面方程公式(33)求参数
:
 (33)
(33)
将得到的参数:
代入过A、B直线参数方程公式(32)得2交点为:
和
该共球球面与AB棱交的2点分别为:二维AB直线的重心和垂心。
同理:我们可以得到该共球球面与其它5棱的重心和垂心相交。
∵该共球球心与四维重心共点,而6棱重心为二维重心;
∴其间距可以使用重心间间距可不用使用坐标,直接使用重心球间距公式 [5] 计算。
例:
·
同理可得其它5点二维重心与共球球心间距为:
·
·
·
·
·
验证3:6棱垂心与该共球交6点:用2点坐标距离公式可得:
例:
·
·
·
·
·
·
通过上述验证:20点共球球心以及半径验证成立。
(其中:二维棱12点:各棱重心与垂心2点,并与4垂线8点:各垂线交2点共,合计20点共球。)
2.2.4. 验证勾股面态12点共球 [8] 半径及球心坐标(即4面重心垂心各2点;以及4垂线各另1交点)
证明“勾股面态三维重心垂心共球”球面交4垂线8点(含4面垂心)以及4面重心共12点共球,三维面态12点共球半径等于一维点态8点共球半径的三分之一。
假设公式(10)、公式(11)成立,勾股面态重心垂心共球半径及球心坐标见表1,将4垂线参数方程与12点共球半径和球心的球面方程联立,即得4垂线交该球面8点;将各面4点重心与12点共球球心按2点坐标距离公式验算,可得勾股面态12点共球及半径。
验证1:4垂线与该共球交8点:
例:
· 过A点与H垂心的垂线的参数方程见:公式(20)代入公式(34)
12点共球球面方程为:
(34)
将得到的参数:
代入过A点垂线参数方程公式(20)得2交点为:
和
这里:
为A点对平面的垂心, 。
。
· 过B点与H垂心的垂线的参数方程见:公式(22)代入公式(35)
12点共球球面方程为:
(35)
将得到的参数:
代入过B点垂线参数方程公式(22)得2交点为:
和
这里:
为B点对平面的垂心,
 。
。
· 过C点与H垂心的垂线的参数方程见:公式(24)代入公式(36)
12点共球球面方程为:
(36)
将得到的参数:
代入过C点垂线参数方程公式(24)得2交点为:
和
这里:
为C点对平面的垂心,
。
· 过D点与H垂心的垂线的参数方程见:公式(26)代入公式(37)
12点共球球面方程为:
(37)
将得到的参数:
代入过D点垂线参数方程公式(26)得2交点为:
和
这里:
为D点对平面的垂心,
。
通过上述验证:12点共球球心以及半径验证成立。
(其中:三维面8点:各面重心与垂心2点,并与4垂线2点中的另1点,4垂线4点;合计12点共球。)
2.2.5. 验证勾股体态6点共球半径及球心坐标
证明“勾股面态四维重心垂心共球”球面交4垂线5点(含1点体垂心)以及1点体重心共6点共球,四维体态6点共球半径平方与6点共球球心至垂心间距平方相同:等于一维点态球心O至4维体态垂心间距的四分之一。
假设公式(13)、公式(14)成立,勾股体态重心垂心共球半径及球心坐标见表1,将4垂线参数方程与6点共球半径和球心的球面方程联立,即得4垂线交该球面5点;将1点体重心与6点共球球心按2点坐标距离公式验算,可得勾股体态6点共球及半径。
验证1:4垂线与该共球交5点:
例:
· 过A点与H垂心的垂线的参数方程见:公式(20)代入公式(38)
6点共球球面方程为:
 (38)
(38)
将得到的参数:
代入过A点垂线参数方程公式(20)得2交点为:
和
· 过B点与H垂心的垂线的参数方程见:公式(22)代入公式(39)
6点共球球面方程为:
(39)
将得到的参数:
代入过A点垂线参数方程公式(22)得2交点为:
和
· 过C点与H垂心的垂线的参数方程见:公式(24)代入公式(40)
6点共球球面方程为:
(40)
将得到的参数:
代入过A点垂线参数方程公式(24)得2交点为:
和
· 过D点与H垂心的垂线的参数方程见:公式(26)代入公式(41)
6点共球球面方程为:
(41)
将得到的参数:
代入过D点垂线参数方程公式(26)得2交点为:
和
验证2:4维重心与该共球球心2点坐标距离
通过上述验证:6点共球球心以及半径验证成立。
(其中:4维体6点:体重心与垂心2点,并与4垂线2点中的另1点,4垂线4点;合计6点共球。)
3. 总结
通过上述验证,证明了4球正交形成的勾股4态 [1],存在点、线、面、体4个共球,它们交4垂线同时交同态重心和垂心。4个共球半径公式(1)成立、4个共球球心坐标公式(2)成立、4个共球球心坐标与垂心H距离公式(3)成立。且得出如下结论。
3.1. 一至四维重心与垂心4个共球半径符合公式(1)
一至四维重心与垂心4个共球半径的变化规律符合公式(1),均在重心球与垂心球半径间。
3.2. 一至四维重心与垂心4个共球球心坐标符合公式(2)
一至四维重心与垂心4个共球球心坐标的变化规律符合公式(2),为4球球心坐标与垂心坐标间。
3.3. 一至四维重心与垂心4个共球球心坐标距垂心坐标间距符合公式(3)
一至四维重心与垂心4个共球球心坐标距垂心坐标5点共线,即欧拉线,4个共球球心距垂心间距为算术平均数。
文章引用
蔡国伟. 证明以正交4球半径为4元数欧拉线的算法——四维体积勾股定理的应用(公式四)
The Proof of the Algorithm of Euler Line with Orthogonal Radius of 4 Spheres as 4 Variables—Application of Pythagorean Theorem of Four Dimensional Volume (Formula 4)[J]. 理论数学, 2019, 09(09): 1043-1059. https://doi.org/10.12677/PM.2019.99130
参考文献
- 1. 蔡国伟. 论勾股四态、以及正交球心间同构的场方程[J]. 理论数学, 2019, 9(7): 763-770.
- 2. 陶杰. 勾股定理的新探索——把勾股定理推广到三维空间[J]. 中等数学, 1983(2): 44.
- 3. 蔡国伟. 体积勾股定理的证明[J]. 理论数学, 2019, 9(6): 723-729.
- 4. 张丽. 正交四面体中的欧拉线定理[J]. 毕节师范高等专科学校学报, 2003, 21(4): 60-61.
- 5. 蔡国伟. 证明正交四球心间15个重心球及距离公式的算法[J]. 理论数学, 2019, 9(8): 880-889.
- 6. 蔡国伟. 证明正交四球心间15个垂心球及距离公式的算法[J]. 理论数学, 2019, 9(8): 928-948.
- 7. 李晶, 张国坤. 探寻四面体外接球球心位置[J]. 上海中学数学, 2014(9): 22-24.
- 8. 胡如松. 垂心四面体的十二点球[J]. 中等数学, 1998(3): 23-24.





 (2)
(2) 本文下同。
本文下同。 (7)
(7) (14)
(14) 。
。 重心点,根据同态垂心与重心间距的平方,可以不用坐标,其间距等于重心球与垂心球半径的平方差。
,
重心点,根据同态垂心与重心间距的平方,可以不用坐标,其间距等于重心球与垂心球半径的平方差。
, 与
与
 (23)
(23)

 (31)
(31) (33)
(33) 。
。 。
。
 (38)
(38)