Computer Science and Application
Vol.4 No.12(2014), Article ID:14620,7 pages
DOI:10.12677/CSA.2014.412047
A sEMG-Based Wireless Interaction Control System
Department of Automation, School of Information Science and Engineering, East China University of Science and Technology, Shanghai
Email: *beiwang@ecust.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Nov. 2nd, 2014; revised: Dec. 1st, 2014; accepted: Dec. 10th, 2014
ABSTRACT
Objective: With the development of human-machine interface, the biomedical signal-based interaction system would be more natural and direct. On the other hand, telecommunication has wide applications in various fields. The objective of this study is to realize a sEMG-based wireless interaction control system. Method: According to the characteristics of sEMG signal, a record and amplifier circuit was designed. The recorded sEMG is passing through a band pass filter. The feature of integration was calculated and transited into binary logical values. The obtained binary logical values were transferred to control module by using ZigBee technique. Finally, the interaction control was realized. Results: Totally 4 healthy subjects with an average age of 20 years old were participated. The subjects were asked to do four kinds of hand movements and three channels of sEMG signals were recorded. Based on the testing results, the accuracy of control command extraction based on sEMG signal analysis and ZigBee transmission was near to 100%. The presented system has the functions of real-time record, analysis, transmit and control. Conclusion: The developed sEMG-based wireless interaction control system has good performance in real-time processing, which can be usable for telecommunication and rehabilitation applications.
Keywords:sEMG, ZigBee, Interaction Control

基于表面肌电信号的无线传输交互控制系统
彭 清,王 镇,钱 冬,王 蓓*
华东理工大学信息科学与工程学院自动化系,上海
Email: *beiwang@ecust.edu.cn
收稿日期:2014年11月2日;修回日期:2014年12月1日;录用日期:2014年12月10日

摘 要
目的:随着人机交互技术的发展,基于生物电信号的交互系统能够带来更加自然和直接的交互方式,且无线传输是实现远程交互不可缺少的技术。本文的研究目的是通过结合无线传输技术来设计并实现基于表面肌电信号的交互控制系统。方法:首先,根据表面肌电信号的特点,设计信号采集和放大电路,采集手臂处的表面肌电信号;其次,对信号进行带通滤波预处理和加窗积分特征计算,完成对信号的二值化处理;然后,通过ZigBee无线传输模块将二值化逻辑序列传输到控制模块,进行控制指令的转换;最后,通过交互操作平台完成交互控制。结果:对4名平均年龄20岁的健康受试者进行了10次实验测试。要求受试者完成四种手势动作,并同步采集了手臂上三处表面肌电信号。通过本文所设计的交互控制方案,对四种手势动作的识别准确率接近100%,能够达到实时采集、分析、传输和控制要求。结论:本文所提出的基于表面肌电信号的无线传输交互控制系统,具有良好的实时处理和控制性能,能够为远程控制、康复医疗等多项领域的应用拓展提供一种有效可行的实现方案。
关键词
表面肌电信号,ZigBee无线传输,交互控制

1. 引言
随着无线通信、无线控制、无线定位和无线组网等技术的迅猛发展,这些新技术已展现了强大的生命力和广阔的市场前景。目前,无线通信技术在康复医疗、数据采集、远程控制和病人移动观察等多个方面都取得了许多新的应用。ZigBee技术作为一种新兴的无线通信技术,具有近距离、低复杂度、低功耗、低数据速率和低成本等特点[1] 。ZigBee技术现已应用到火灾自动报警系统、智能家居解决方案、智能照明控制系统等各种系统中[2] -[4] 。
表面肌电信号(Surface Electromyography, sEMG)是从皮肤表面记录下来的神经肌肉系统活动时的生物电信号,能反映出不同肌肉的动作情况[5] 。通过sEMG来判断人体动作意图并转换成设备输入指令,已成为基于生物电信号的控制系统中一个受到关注的研究方向。sEMG的应用领域已经从传统的医学诊断、康复工程推广到机器控制和人机交互(Human-Machine Interface, HMI) [6] : Wheeler, et al. (2004, 2006)采用放置在手前臂的多通道sEMG传感器获取信号识别手势控制操纵杆的运动和虚拟按键运动[7] [8] 。Natalia M. López et al. (2009)通过对截肢患者残肢处sEMG信号的分析,实现了机械手臂的4自由度控制[9] 。Kevin H. Ha, Huseyin Atakan Varol和Michael Goldfarb (2011)研究的着眼点放在了下肢。他们通过分析下肢截肢患者残肢部分的SEMG信号,实现了静坐姿态时的下肢电动膝关节的控制[10] 。
本文主要围绕结合ZigBee无线传输技术构建基于表面肌电信号的交互控制系统的目标而展开,研究工作包括表面肌电信号采集、信号的分析和特征提取、应用ZigBee技术实现信号的无线传输、以及人机交互控制系统的设计与实现。整个系统的构建框架如图1所示,首先在上臂三处表面放置检测电极,基于STM32L15xRx单片机实现表面肌电信号的采集;其次在下位机上对信号进行分析,包括特征计算和二值化处理;然后通过ZigBee无线传输网络,将二值化处理结果传送至上位机;最后在上位机上进行控
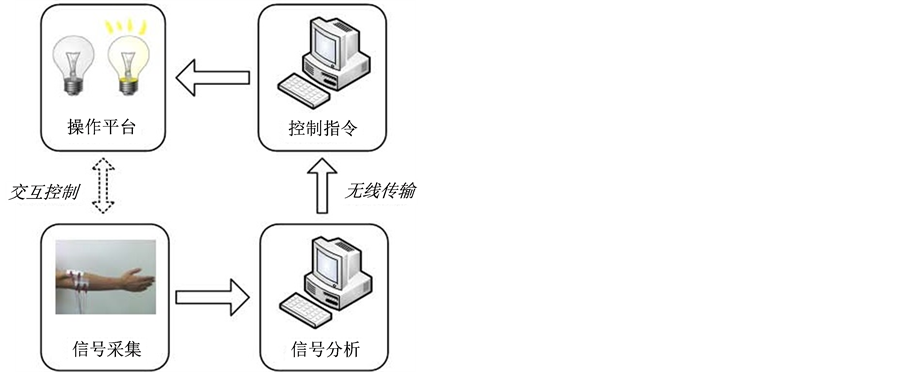
Figure 1. The block diagram of sEMG-based wireless interaction control system
图1. 基于无线传输技术的表面肌电信号交互控制系统设计
制指令的转换,并通过交互操作平台完成交互控制。本系统的构建是为在远程控制、康复医疗等多项领域进行应用拓展提供一种有效可行的实现方案。
2. 表面肌电信号的采集
2.1. 信号采集电路设计
肌电信号由两个电极来检测,两个输入信号“相减”,去掉相同的“共模”成份,只放大不同的“差模”成份。肌电信息在人体组织(容积导体)内的传递,会随着距离的增加而很快衰减。因此电极宜贴放在肌电发放最强的肌腹部,以减少邻近肌肉的肌电干扰(串音)。采用较小的电极可提高选择性,但会增加电极与皮肤间的接触阻抗。信号采集模块的设计采用STM32L15xRx单片机,采集放大部分电路如图2所示。
在设计肌电信号放大电路时,我们着重考虑了以下问题:
1) 高增益:表面肌电信号幅度约在分布μV~mV数量级之间,是一种极其微弱的信号,要将其放大到一伏左右才能方便使用。所以将放大器的增益设置在80 dB。
2) 高共模抑制比:表面肌电信号的采集易受50 Hz工频电源及其它高频电噪声的干扰。但这些干扰信号在放大器的输入端表现为同幅同相的信号——共模信号,因此选用高共模抑制比的放大电路对干扰信号进行抑制。
3) 高输入阻抗:肌肉组织与电极之间的接触阻抗可能在相当大的范围内变化,天气干燥地区,接触电阻甚至高达几万欧姆,在这种条件下,即使放大器的共模比极优良,如果输入阻抗不够高,共模干扰信号也会造成输出误差。因此必须提高放大器的输入阻抗。
2.2. 手势动作实验设计
本实验中,根据人们日常生活中经常使用的手势动作,我们选取了4种不同的手势动作,分别为上翻(UP)、下翻(DOWN)、握拳(FIST)和张手(OPEN)。各动作手势如图3所示。共有4名平均年龄为20岁的健康受试者参与了本次实验。实验过程中,分别采集了桡侧腕伸肌、桡侧腕屈肌和尺侧腕伸肌3处的表面肌电信号,按照肌肉纤维的方向构成双极导联记录表面肌电信号,电极安放位置间隔约3 cm,采样频率为300 Hz。
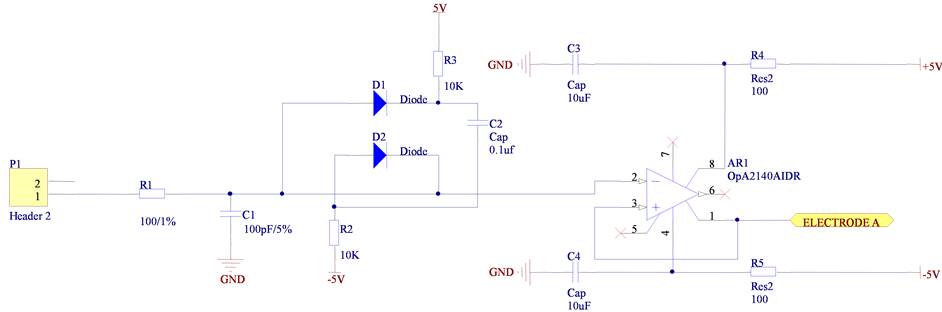
Figure 2. sEMG signal acquisition amplification circuit
图2. 表面肌电信号采集放大电路图
 (a)
(a) (b)
(b) (c)
(c) (d)
(d)
Figure 3. The diagram of four gestures. (a) Up, (b) Down, (c) Fist, (d) Open
图3. 四种手势动作示意图。(a) 上翻,(b) 下翻,(c) 握拳,(d) 张手
3. 表面肌电信号的分析
表面肌电信号的分析处理流程如图4所示。对原始sEMG信号先后进行了带通滤波、加窗积分、二值化处理,最终输出二值化逻辑序列。
由于表面肌电信号主要集中在50~100 Hz的范围,所以进行50~100 Hz的带通滤波,以消除噪音干扰。然后,进行信号积分值的计算,计算公式如式(1)所示。
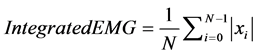 ,(1)
,(1)
式(1)中,N是计算积分的步进长度,x是位于步进长度内的EMG数据。接着,将积分值与事先设定的阈值比较,转换成二进制量0和1。最后获取三条通道上二进制取值组成二值化逻辑序列。
4. ZigBee无线传输方案
ZigBee无线传输采用TI公司的CC2530系列产品。CC2530的预留IO口还可作为二次开发使用。CC2530系列产品是高性能、低功耗的8051微控制器内核,能够适应2.4 GHz IEEE 802.15.4的RF收发器,本身具有8~14位的ADC,具备高级加密标准(AES)协处理器,是作为ZigBee模块控制器的最优选择。
为了实现上位机和下位机之间的无线传输,使用了CC2530核心板和功能底板各两块。CC2530核心板引出全部IO口,标准2.54排针接口,可直接应用在功能底板上,使用2.4 G全向天线。功能底板自带USB转串口功能(PL-2303),可由方口USB、DC2.1电源座(5 V)供电,拥有Debug接口、兼容TI标准仿真工具、引出所有IO口、常用的串口引脚以及5 V/3.3 V引脚,支持CC2530核心板。将一块核心板与

Figure 4. Signal processing flowchart
图4. 信号处理流程图
功能地板用作协调器,另一块核心板与功能地板用作终端。在协议栈上配置好sEMG采集模块,终端节点将信号数据无线发送到协调器,协调器通过串口发送给PC上位机,如图5所示。由于采用2.4 GHz频段,传输时有16个信道(Channel 11~26)可以使用,此处使用Channel 11。
在发送部分需要完成两项任务:登记事件和设置发送内容。登记事件包括设置事件编号、发送的时间等。编写代码时,可以定义自己的事件,在同一个任务下可以有多个事件,但编号不能重复。设定事件重复执行的时间时是以毫秒为单位的。登记事件只执行一次,相当于系统初始化。待发送部分代码完成,上电后CC2530会以周期性广播方式发送数据。设置发送内容时要定义数据包的ID,目的是为了和接收方建立联系。在接收部分也需要完成两项任务:读取接收到的数据和把数据通过串口发送给PC机。读取数据时,先读取发来的数据包的ID,判断是否与发送时定义的数据包ID相同,如果相同就执行下一步,将数据读出发送至计算机。
5. 人机交互控制系统设计
人机交互界面如图6所示,拥有两种模式:自动和手动。在自动模式下,程序将不断读取最新传送到的数据,并执行相应的指令,在界面右侧实时显示相应的执行效果。在手动模式下,先选择程序需要访问的数据段,也即填写时间段,以显示相应时间段内的二值信号。接着执行相应的指令,在界面右侧显示相应的执行效果。此外,软件还加入了保存执行历史记录的功能。
本文根据四种手势动作,通过人机交互界面模拟控制表示东、南、西和北四个方向的小灯。手势动作、二值逻辑和控制指令的对应关系设计详见表1。表1中的第一列表示四种手势动作,第二列为其对应的三个通道的表面肌电信号经过二值化处理后的逻辑序列表示,第三列表示逻辑序列所对应四个方向。通过表1将手势动作、数据处理结果和控制指令相互关联。实时处理的结果将显示在图6所设计的交互界面中,受试者能够通过不同手势动作,控制表示方向的小灯的状态。
6. 实验结果
按照图3所示的信号处理流程,所采集到的原始表面肌电信号、经带通滤波处理的信号、加窗积分计算后的特征、以及二值化处理后的结果信号如图7所示。在图7中,(a)图显示了所采集到的三个通道的表面肌电信号;(b)图是经过50~100 Hz的带通滤波后的信号,带通滤波主要为了获取与肌肉运动相关的高频信号;(c)图是按50个点为时间窗的肌电积分特征值;(d)图是根据肌电积分特征值获得的二值化处理结果。归纳所得到的二值信号,将其与控制指令进行匹配并执行。根据图7(d)的二值化处理结果,在上位机上按照表1所设计的对应关系,模拟控制小灯的结果如图8所示。
通过4名受试者的10次实验,小灯的模拟控制结果准确率能够接近100%。结果表明,本文所设计的采集电路能够获取反映肌肉运动状态的电信号,数据处理和分析方法的识别准确率高,且具备上位机和下位机之间的无线数据传输和控制功能。
7. 讨论与结论
表面肌电信号是将检测电极放置在皮肤表面而测得的肌电信号。运动过程中相应肌群的肌电信号不

Figure 5. ZigBee wireless transmission scheme
图5. ZigBee无线传输方案
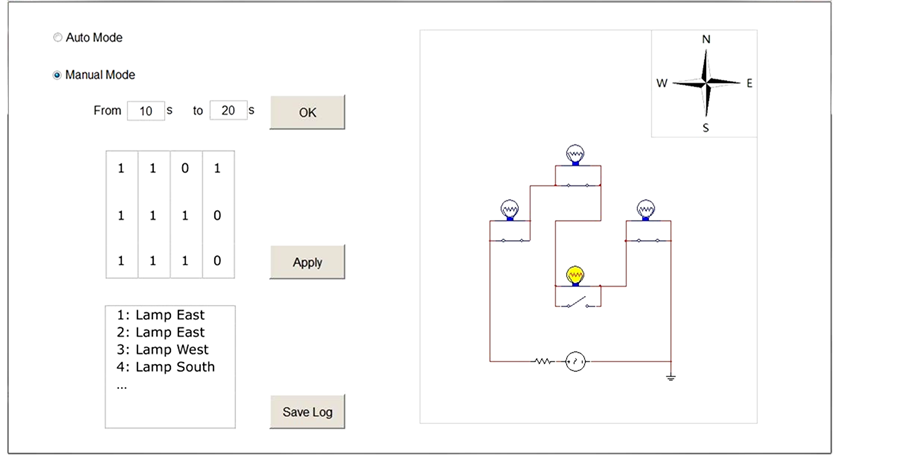
Figure 6. The interactive software interface diagram
图6. 交互软件界面图

Table 1. The relation of gestures, binary logic and control commands
表1. 手势动作、二值逻辑、控制指令对照表
但能够反映肌群的收缩强度和肌群疲劳状态等信息,还能反映出动作完成过程中肢体的位置和运动意图等重要信息。本文主要研究肌电控制系统,对各个肌群上采集到的表面肌电信号进行分析,以判断相应肌群的收缩状态,进而对人体的不同动作或运动意图进行识别,最终将识别结果输出至外围设备,对其实施控制。虽然肌电信号在肌肉收缩和平静时的区别特征显著,但可利用的模式比较单一。本文则利用肌电信号的特点,通过分别获取不同肌群处的肌电信号,并计算一个特征值得到表征手势动作的一组二值化逻辑序列。简化了信号分析模块的计算量,识别准确率高,且适用于实时处理。
无线传输是实现远程控制不可缺少的技术。ZigBee是基于IEEE802.15.4标准的低功耗个域网协议,是一种短距离、低功耗的无线通信技术。随着越来越多的ZigBee芯片和模块陆续问世,ZigBee技术已逐渐成为业界通用的无线通信技术之一。本文利用ZigBee技术构建了无线传输肌电控制系统,为ZigBee技术应用到肌电控制中提供了一种可行的实施方案。其主要可适用于康复领域的应用,例如对无法自如
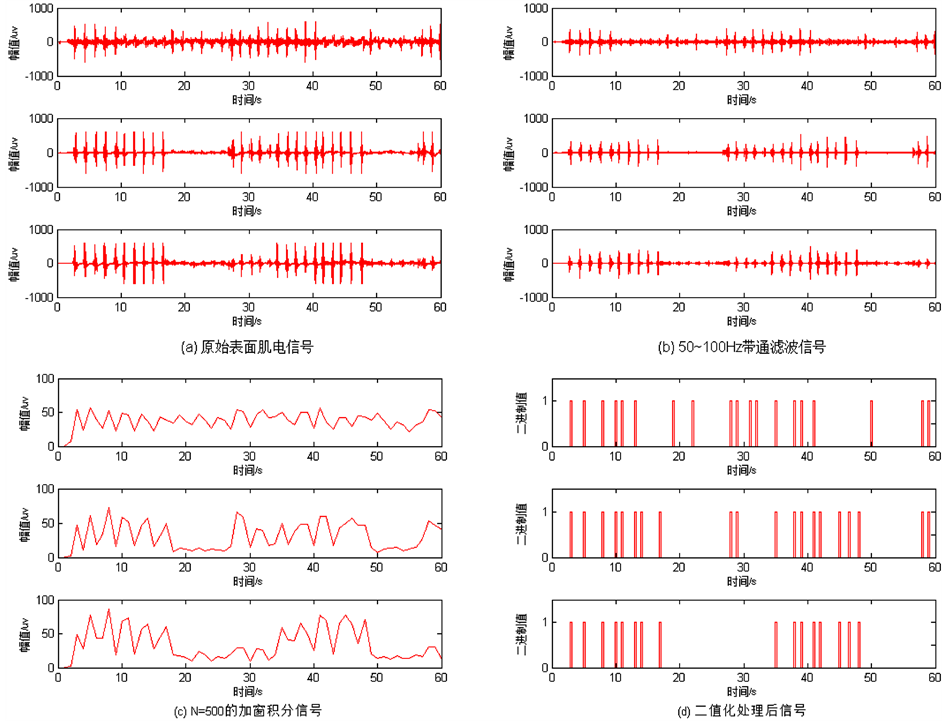
Figure 7. Signal processing results
图7. 信号处理结果图
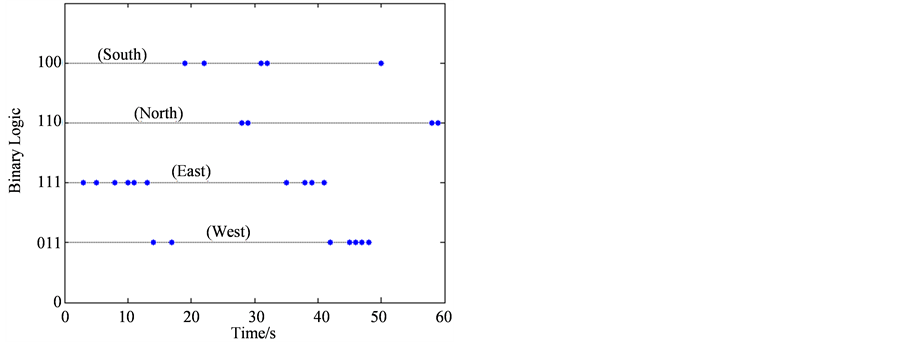
Figure 8. Control results
图8. 模拟控制结果图
行走的病患,通过手势动作可以控制视觉范围内相关设备的操作。本文所设计的交互操作平台,能够让受试者感受到“所做即所想”较为直观且自然的交互控制。此外,借助于局域网或互联网,也可以将ZigBee技术融合到远距离交互控制。
致 谢
感谢华东理工大学电气工程及其自动化专业2011级的王思明、韩松、阎嘉迪等同学参与了本课题的信号采集实验和信号传输实验的研究工作。
基金项目
国家级大学生创新训练资助项目(20131025153)、上海市科委科技创新行动计划产学研医合作项目(12DZ1940903)。
参考文献 (References)
- [1] http://zigbee.org/About/AboutTechnology/ZigBeeTechnology.aspx
- [2] 张静 (2009) 基于ZigBee技术的火灾自动报警系统. 山西财经大学学报, S2, 224-225.
- [3] 钟依平 (2013) 基于ZigBee无线技术的智能家居方案. 中国公共安全, 14, 134-138.
- [4] 唐惠玲, 刘汉瑞, 何圣华 (2013) 基于ZigBee技术的智能照明控制系统设计. 自动化与信息工程, 6, 40-44.
- [5] 李静, 赵丽, 任淑艳等 (2011) sEMG识别控制系统在虚拟仪器平台上的实现. 机床与液压, 13, 72-74.
- [6] 雷敏 (2001) 肌电假肢控制中的表面肌电信号的研究进展与展望. 中国医疗器械杂志, 3, 156-160.
- [7] Wheeler, K.R. and Jorgensen, C.C. (2004) Gestures as input: Neuroelectric joysticks and keyboards. IEEE Pervasive Computing, 2, 57-61.
- [8] Wheeler, K.R., Chang, M.H. and Knuth, K.H. (2006) Gesture-based control and EMG decomposition. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 4, 503-514.
- [9] López, N.M., di Sciascio, F., Soria, C.M. and Valentinuzzi, M.E.
(2009) Robust EMG sensing system based on data fusion for myoelectric control of
a robotic arm. BioMedical Engineering OnLine.
http://www.biomedical-engineering-online.com/content/8/1/5

NOTES
*通讯作者。