Computer Science and Application
Vol.
09
No.
04
(
2019
), Article ID:
29659
,
7
pages
10.12677/CSA.2019.94080
Air Quality Detection Drone System Based on Beidou Navigation System
Yingting Li1, Ye Huang2, Shanxiong Chen1
1Southwest University, Chongqing
2High School Affiliated to Southwest University, Chongqing

Received: Mar. 25th, 2019; accepted: Apr. 4th, 2019; published: Apr. 11th, 2019

ABSTRACT
Aiming at the problems of poor real-time performance, low precision and space limitation of traditional air quality monitoring methods, this paper designs a real-time monitoring system for air quality based on the Beidou navigation system independently developed by China. It mainly includes Beidou navigation system, drone system, ground control center and mobile phone terminal. The UAV system includes a BDS module, an information acquisition module, a control unit module, and a communication transmission module. The core control unit module uses the single-chip computer to process the PM2.5, PM10, temperature and humidity, and other data collected by the gas sensor and the geographical location information data collected by the BDS module, and communicates with the ground control center through the GSM network in real time, and the PC of the ground control center imports the real-time map, to visualize the data transmitted by the drone. The analysis shows that the system has outstanding advantages and can realize the function of real-time monitoring of air quality, which makes up for the shortcomings of current air quality monitoring methods, can provide a reliable basis for air environment treatment, and has broad application prospects.
Keywords:Beidou Navigation, Monitoring Air, Unmanned Aerial Vehicle
基于北斗导航系统的空气质量检测无人机系统
李盈婷1,黄也2,陈善雄1
1西南大学,重庆
2西南大学附属中学,重庆
收稿日期:2019年3月25日;录用日期:2019年4月4日;发布日期:2019年4月11日

摘 要
针对传统空气质量监测方法存在实时性差、精度低、空间局限等问题,本文基于我国自主研发的北斗导航系统,设计了一种空气质量实时监测系统。主要包括北斗导航系统,无人机系统,地面控制中心和手机移动终端。该无人机系统包含BDS模块、信息采集模块、控制单元模块和通信传输模块等。核心的控制单元模块采用单片机处理气体传感器采集的PM2.5,PM10,温湿度等数据和BDS模块采集的地理位置信息数据,通过GSM网络与地面控制中心进行实时通信,地面控制中心的PC导入实时地图,将无人机传输的数据可视化。分析表明,该系统优点突出,可以实现实时监测空气质量的功能,弥补了当前空气质量监测方法的不足之处,能为空气环境治理提供可靠依据,具有广泛的应用前景。
关键词 :北斗导航,监测空气,无人机

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
自18世纪以来,世界各国在工业化的进程中取得了飞速进展,但同时也出现了很多问题,尤其近十年来,空气污染愈发严重。温室效应、臭氧空洞、空气质量和PM2.5等名词频繁出现在人们的视野之中。中国作为当今最大的发展中国家,经济建设与环境保护的矛盾显得尤为突出。美国耶鲁大学发布《2016环境绩效指数报告》 [1] ,对全球环境问题视为高级优先领域的180个国家进行了环境绩效指数(EPI)排名,中国的空气质量排名倒数第二位,这对我国城市空气质量监测力度及监管力度提出了新的要求。
传统的空气质量地面监测法是在一座城市的多个经纬点布置检测站台,由于地理位置、自然条件的种种限制,导致这种方法对于城市空气质量的监测不具有代表性,不能形成全面对区域性空气污染的监测、评价的能力,而且灵活度不够高,缺乏流动观察和立体观察的能力,同时需要较长时间的安装部署,无法对污染排放源实现快速的监测。
文献 [2] 研究了基于大数据和物联网的空气质量预监测,利用智能决策算法分析空气质量历史数据和实时采集数据,但大数据预测过程中带有较强的偶然性,偶尔会出现预测偏差情况;文献 [3] 设计了小型四旋翼无人机空气质量监测仪,对传统定点检测空间覆盖度不足的问题提出了改进,但此监测仪中采用SD卡存储采集数据,未能实现数据的在线传输功能;文献 [4] 设计及实现了基于北斗的空气质量实时监测系统,将北斗定位系统应用到了环境监测领域,但仍需人工确定空气质量采集点的数量及位置。上述研究都实现了对大气中一种或多种污染物的检测工作,具有一定创新性且便于实现,但还存在偶然性偏差、拓展性不强、应用范围小等局限性。
本文设计基于北斗导航系统(BeiDou Navigation Satellite System, BDS)的空气质量监测无人机系统,利用BDS覆盖范围广、全天时、高精度及近乎连续实时特点实现对无人机的定位控制;并将传感器、单片机等模块装载于无人机上,从而使该系统能够多角度、全方位地对空气质量进行实时监测;利用GPRS网络及BDS定位模块,将无人机经纬度、海拔高度及实时监测的空气质量等信息反馈到地面控制中心,地面控制中心存储并处理数据,构建城市空气质量可视化地图,以显示实施污染物的情况和面积位置,并生成相关分析文档,供普通客户端及决策者浏览访问,实现便捷地对空气质量的监测及对无人机的控制功能。
2. 系统介绍
如图1所示,本系统由北斗系统、无人机系统、地面指挥中心和手机移动终端组成,无人机部分包含北斗导航模块、信息采集模块、控制单元模块、数据存储模块、通信传输模块和飞机运行模块。当无人机飞行到空间的某一点时,北斗导航系统对无人机进行实时定位,BDS模块首先确定该点的地理位置,包括经纬度、海拔高度和北京时间;同时信息采集模块中的传感器对该空间区域的空气质量进行检测;接着控制单元模块对地理位置数据和空气质量信息数据进行分析处理,然后数据存储模块对相关数据将进行存储打包;最后通信传输模块将数据包传输到地面指挥中心的PC机上并接入地图,基于“互联网+”的思想,便携式PDA能够方便工作人员进行实时管控 [5] 。飞机运行模块则包含飞机日常运行的必须软硬件设备,主要包括能源电池、超声波发射器、陀螺仪和加速度计等部分,能够实现供能、飞机避障、姿态矫正和自适应飞行等功能。

Figure 1. System design composition
图1. 系统设计构图
硬件部分主要为采集设定经纬度点位的空气质量而设计,其中BDS模块与信息采集模块通过电路板与控制单元模块电连,同时控制单元模块与无人机端通信传输模块电连,而无人机端通信传输模块与地面控制中心端通信传输模块通过无线连接。数据采集人员可直接使用地面控制中心的监控计算机,利用计算机终端数据采集程序进行数据采集并将数据实时长传至服务器。便携式PDA则通过客户端APP及网页查询空气质量数据。软件系统则由服务器及面对不同对象的智能软件终端组成,基于MySQL数据库、Protel 99SE、Keil、Delphi及Android等客户端开发环境设计开发,并通过Pixhawk软件规划无人机路径,实现航路点飞行。最后在地面控制中心监控计算机终端,将空气污染情况导入实时地图,实现可视化,并根据用户需求生成相应分析报告。
3. 系统设计
3.1. 北斗导航系统
在寻求独立的过程中,十多年来中国一直致力于建设一个拥有国家自主产权的卫星导航系统,并命名为“北斗”。北斗导航系统已于2012年完成14颗卫星的组网,并为亚太地区提供区域导航服务 [6] 。北斗卫星导航系统由空间段、地面段和用户段三部分组成,建成后可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力。总的来说,该系统具有高精度、低成本的优点。不仅能为无人机提供精准的定位和灵敏的导航服务;而且能够加强无人机的应变能力和自适应性;还可以增加地面控制中心与无人机的信息交流频率和速度。
3.2. 无人机系统
3.2.1. 北斗导航模块
目前市面上成品的独立BDS模块特别罕见,因此系统采用ATGM332D 5N-31北斗 + GPS双卫星模块来提供时间位置和精准导航,能实时得到无人机所在的经纬度以及海拔高度。其集成度高、功耗低,且尺寸较小,非常适合搭载在无人机端。在其与北斗导航系统及GPS系统信号传输的同时将地理位置传输到控制单元模块,并通过数据存储模块进行短期的地理位置数据存储,最终将地理位置通过数据传输到地面控制中心通信传输模块接受端。
3.2.2. 信息采集模块
近来在气体传感器、太阳能电池和航空电子设备方面的技术改进已经使得配备有用于高空间和时间分辨率的气体感测系统的和UAV的开发成为可能 [7] 。系统中使用SDS011模块监测PM2.5、PM10数据(单位:ug/m3),其测量数据准确率很高,且具有较高的灵敏度,在无人机位置变换时,其测量数据的响应时间小于10秒,因此可在无人机悬停及场景变换过程中实时测得数据。空气质量信息还包括温湿度,系统使用DS18B20模块采集温度(单位:℃),DS18B20具有体型轻小,硬件开销低、抗干扰能力强及精度高的特点,因此将其封装在无人机上不会增加额外的重量超过无人机的载重,而且测得的温度数据稳定且精度较高;使用DHT11采集湿度(单位:%RH,Relative Humidity),DHT11传感器具有响应速度快、抗干扰能力强、体积小且长期稳定及输出已校准数字信号等特点,因此将其封装在无人机上测量湿度数据。
3.2.3. 控制单元模块及数据存储模块
通信传输模块和控制单元之间通过信号调节电子电路来实现,信号调节电路是放大器和模数转换器的组合,气体传感器提供给放大器电路的输出,改输出被提供给模数转换器,然后达到控制单元 [8] 。控制单元模块也称为单片机,其具有丰富的内置资源用于数字输入,输出端口。控制单元是空气质量监测系统的主要模块,在芯片内部运行的程序协调物质测量的过程。该系统中使用STC89C52芯片,它的优点使组件较小,且成本较低。由于控制单元模块中的单片机有部分数据存储功能,且能够存储目前我们所需的数据,因此实施过程中,控制单元模块也起到了存储单元模块的作用。控制单元中的单片机通过临时存储或少量存储无人机运行轨迹参数、某一区域连续一个月空气质量信息等数据,并迅速通过通信传输模块将其转移至地面数据库服务器端。
控制单元主要通过单片机内程序实现信息的收集及将信息传输给通信传输模块,并发送指令以此来控制通信传输模块。一切信息的传输及发送都需要以电路板作为载体,系统使用protel 99SE绘制封装各个模块电路板的原理图及PCB图。PM2.5、PM10及BDS模块数据都通过单片机串口发送到单片机,为能区分数据使用与或门与单片机其他引脚口共同控制。硬件电路板电路图如图2所示,主要包括STC89C52单片机、电源电路、晶振电路、温湿度传感器电路、监测PM2.5及PM10电路、BDS模块电路、GSM模块电路等。
3.2.4. 通信传输模块
一般的无线电接收机是面向2G的移动数据业务和3G蜂窝通信系统全球移动通信系统(GSM),通信
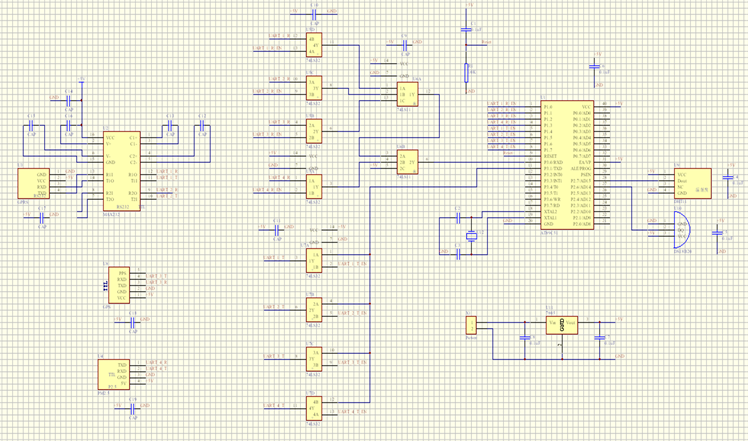
Figure 2. Hardware circuit diagram
图2. 硬件电路图
传输模块主要包含无线GSM调制解调器,可以将数据传输到地面控制中心的计算机上 [9] 。无人机上的GSM模块作为通信设备发送时间日期以及空气污染物的空间位置和污染情况,具体包括污染区域的水平纬度和经度坐标和高度信息、PM2.5、PM10、温湿度数据。系统中通信传输模块采用FY-SIM900A GSM (GPRS)模块,其具有发送短消息随时在线,不需拨号、价格便宜、覆盖范围广及距离限制小等特点,适合于频繁传送小流量信息数据。
3.2.5. 飞机运行模块
飞机运行模块包含飞机日常运行必备的软硬件设备。首先是能源,如果采用汽油柴油为能源则飞机在运行的过程中会产生大量的干扰气体,影响空气质量监测效果。考虑到能源部分自身有一定的重量,所以必须以高能量密度电池为能源,减少机体总重,增加航行时间。然后是超声波发射器,超声波的应用可以使无人机自动躲避障碍物,而且能使无人机反应更加灵敏,大大减少了坠机事故的发生。而陀螺仪和加速度计则能够保障飞机在恶劣环境下得以生存,在北斗导航系统信号弱或失灵的条件下渡过难关。由于ZD850无人机具有可负载量较大(可载重500 g),可在指定经纬度悬停30秒以上,及可规划路径和航时在轻载重下可达10分钟等优点,因此系统使用ZD850无人机模块。无人机飞行过程中,使用Pixhawk进行路径规划飞行,可以实现自动起飞、降落以及按照航路点飞行。
3.3. 地面控制中心
地面控制中心和便携式PDA移动终端都属于执行层次,PC将接收和检测到的数据使用图形用户界面(GUI)显示在显示器上。基于数据的服务器附接到污染服务器以存储污染物情况数据。将污染服务器连接到地图,以显示实时污染物的情况和面积位置,便捷地实现对空气质量的监测及对无人机的控制功能。系统使用Delphi开发监控计算机客户端,主要用于地面控制中心端通信传输模块收集数据的集成,且开发基于.NET平台的数据采集软件,实现对BDS定位模块、空气质量监测传感器及温湿度传感器数据的管理,设置其采集数据类型,实现对数据采集的同时,将数据实时上传至服务器。
无人机可实现空气质量定点、定区域监测,为构建功能丰富、交互性强的地图应用,空气质量分布图调用百度地图JavaScript API,通过设置监测区域、颜色、透明度等参数直观展示大气污染的空间分布情况。并且利用Java语言结合SQL语句读取数据库中的空气质量数值及其坐标,可实现在二维实时地图中定点及定区域空气质量数据的实时显示。为了数据分析的便利,采用热力度来衡量热力地图所反映的密度情况,对不同色彩区域赋予不同的热力度数值,颜色越深热力度越高代表空气污染越严重,反之则代表空气污染较轻。
3.4. 手机移动终端
基于“互联网+”的思想,为了能让环保工作人员便捷地对无人机进行实时管理和空气质量数据读取,开发PDA端APP,在可实现网页浏览空气质量监测分析报告的同时,可直接使用APP实现对无人机的操控,使无人机的监测范围更广。手机移动终端能够随时对无人机地工作情况进行查看和管控,一旦出现异常情况,PDA也可以自动报警,提醒工作人员立即采取相关措施解决突发问题。
4. 结语
该系统基于北斗的精确定位模块功能下,可以实现实时监测特定地区的空气质量,定位飞行到指定地点,然后通过传感器采集并分析信息,然后将位置信息同空气质量监测状况通过短报文方式反馈给监测中心;而信息采集模块中的传感器一旦监测到有害气体时,无人机可以跟踪有害气体并悬停到违规排放有害气体工场拍照取证;此外,该系统可以在降低成本的同时在同一区域内部实现多处采样,因为无人机对比固定的监测站的优势就在于可灵活移动飞行,采集各个区域的空气质量,通过多样本分析使检测结果对某一区域而言具有普遍性,使结果更为准确;无人机可以实现最大限度的低空飞行,在屋顶或楼顶监测PM2.5含量,以防高空中测到的PM2.5值与实际人类居住层高度不符;该系统采用手机PDA可以对无人机进行控制,方便工作人员操作管理;由于无人机飞行时需要使用能量,但燃油会对监测结果有影响,因此使用电池供能装置绿色环保,高效持久。
致谢
在本次论文的撰写中,我得到了陈善雄教授的精心指导,不管是从开始定方向还是在查资料准备的过程中,一向都耐心地给予我指导和意见,使我在撰写论文方面都有了较大提高;同时也显示了老师高度的敬业精神和职责感。在此,我对陈善雄教授表示诚挚的感谢以及真心的祝福。同时也感谢一起合作的伙伴,有你们才有我的成长。
基金项目
重庆市中小学创新人才培养工程项目计划研究项目:一种空气质量监测无人机的设计;重庆市教委科学技术研究项目:基于深度卷积生成式对抗网络的语音分离研究,KJQN201801901。
文章引用
李盈婷,黄 也,陈善雄. 基于北斗导航系统的空气质量检测无人机系统
Air Quality Detection Drone System Based on Beidou Navigation System[J]. 计算机科学与应用, 2019, 09(04): 703-709. https://doi.org/10.12677/CSA.2019.94080
参考文献
- 1. Global Metrics for the Environment: 2016 Environmental Performance Index Report.
- 2. 刘燕, 张永平, 朱成, 等. 基于大数据和物联网的空气质量预测监测研究[J]. 通信学报, 2017(s2): 129-138.
- 3. 赵庆展, 张天毅, 陈洪. 小型四旋翼无人机空气质量监测仪设计[J]. 现代电子技术, 2017(24): 102-107.
- 4. 徐博良, 邓健, 苏展林, 等. 基于北斗的空气质量实时监测系统设计与实现[J]. 测绘与空间地理信息, 2018, 41(12).
- 5. Raju, H.P, Partheeban, P. and Hemamalini, R.R (2012) Urban Mobile Air Quality Monitoring Using GIS, GPS, Sensors and Internet. International Journal of Environmental Science and Development, 3, 323-327. https://doi.org/10.7763/ijesd.2012.v3.240
- 6. Montenbruck, O., Hauschild, A., Steigenberger, P., et al. (2013) Initial Assess-ment of the COMPASS/BeiDou-2 Regional Navigation Satellite System. GPS Solutions, 17, 211-222. https://doi.org/10.1007/s10291-012-0272-x
- 7. Malaver, A., Motta, N., Corke, P., et al. (2015) Development and Integration of a Solar Powered Unmanned Aerial Vehicle and a Wireless Sensor Network to Monitor Greenhouse Gases. Sensors, 15, 4072. https://doi.org/10.3390/s150204072
- 8. Suryawanshi, S.U., Dhang, D.I. and Mote, S.B. (2014) Implementation of Embedded Wireless Air Pollution Monitoring System. Journal of Electronics and Communication Engineering, 3, 27-30.
- 9. Manjula, S., Red-dy, P.A.K., Lakshmipathy, M., et al. (2013) Mobile Data Acquisition for Air Pollution Monitoring Using Embedded System. Interna-tional Journal of Engineering Research & Technology, 2, 2850-2855.