Computer Science and Application
Vol.
11
No.
09
(
2021
), Article ID:
45182
,
8
pages
10.12677/CSA.2021.119230
基于骨架局部曲率分水岭算法的颗粒特征识别分割方法
吕众鑫,冉顺义
天津工业大学,天津

收稿日期:2021年8月10日;录用日期:2021年9月6日;发布日期:2021年9月14日

摘要
针对晶圆生产过程软损伤吸杂工艺中,判断晶圆背部经软损伤处理后的吸杂能力,对背部类圆形杂质颗粒进行密度检测时,存在大量粘连颗粒无法准确计数的问题。本文基于Halcon视觉平台提出轮廓骨架局部曲率分析分水岭分割方法对粘连目标进行分割。首先将经过图像预处理的晶圆表面颗粒图像通过距离变换和分水岭算法进行初步分割。对分割后的区域进行凸性筛选,选择可能粘连的区域进行骨架的局部曲率分析,进一步分割粘连目标。解决在无法获取颗粒全部轮廓的情况下,大规模粘连分割问题,实现颗粒计数。实验结果表明,所提出的优化方法对于复杂情况下的粘连颗粒物能很好地适应,综合准确率达到96.7%,比传统的分水岭算法提高了8.5个百分点,验证了本文所提方法的有效性。
关键词
分水岭算法,局部曲率,图像分割,区域骨架,Halcon

Particle Feature Recognition and Segmentation Method Based on Skeleton Local Curvature Watershed Algorithm
Zhongxin Lv, Shunyi Ran
Tiangong University, Tianjin

Received: Aug. 10th, 2021; accepted: Sep. 6th, 2021; published: Sep. 14th, 2021

ABSTRACT
For the soft damage gettering process in the wafer production process, to determine the gettering ability of the back of the wafer after the soft damage treatment, when the density of the back round impurity particles is detected, there is a problem that a large number of adhesion particles cannot be accurately counted. Based on the Halcon vision platform, this paper proposes a watershed segmentation method to analyze the local curvature of the contour skeleton to segment the adhesion target. First, the pre-processed wafer surface particle image is preliminarily segmented through distance transformation and watershed algorithm. Convexity screening is performed on the segmented regions, and the regions that may be adhered are selected for local curvature analysis of the skeleton, and the adhered targets are further segmented. Solve the problem of large-scale adhesion and segmentation when the full outline of the particles cannot be obtained, and realize the particle counting. The experimental results show that the proposed optimization method can adapt well to the adhesion of particles in complex situations, and the comprehensive accuracy rate reaches 96.7%, which is 8.5 percentage points higher than the traditional watershed algorithm, which verifies the effectiveness of the method proposed in this paper.
Keywords:Watershed Algorithm, Local Curvature, Image Segmentation, Regional Skeleton, Halcon

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在晶圆制造加工过程中,金属离子杂质会降低晶圆表面内部少子寿命,影响硅器件的性能。通常通过喷砂法在晶圆背面形成软损伤吸杂点,在后续的热循环工艺中,将金属杂质沉淀,达到去除杂质的目的。生产中,通过对晶圆背部杂质颗粒的密度检测,判断晶圆的吸杂能力,反应吸杂工艺的加工质量。在金属杂质向背面移动过程中,杂质颗粒在晶圆背表面位置是随机的,本身是不均匀的,存在大量粘连情况,而如何准确地分割粘连颗粒并统计一个单位区域内正确的颗粒数量是对准确分析晶圆生产品质的前提。工业上通过人工标注计数的方式来检查品质,随着机器视觉技术的快速发展,图像处理已经广泛应用于智能制造领域,通过图像处理技术能更快速解决此类问题。
目前,针对不同的研究对象,很多学者给出了不同粘连物体分割的解决方案。常用的有连通域分割算法、分水岭分割算法、主动轮廓分割算法等。姚梦等 [1] 通过图像预处理和形态学分析后,采用连通域粘连单元分割,处理了复杂背景下的粘连物分割问题。倪志强等 [2] [3] [4] 通过距离变换和灰度形态重构后再进行分水岭变换,得到的分割结果很好地抑制了过分割。李冰 [5] [6] 通过提取粘连目标骨架的形态学分析,通过断点匹配规则,匹配出最优的分割位置,实现分割,使分割精度更高,对物体本身形状影响小。何亚茹等 [7] 基于边缘和区域的主动轮廓模型。依赖图像梯度信息定义边缘停止函数,通过梯度的变化,找到粘连物体的边界。阳波 [8] [9] 等通过对物体边界进行拟合,寻找凹点的方式进行分析,对粘连物体实现了分割。Zhang H [10] [11] 等提出了图像的标记提取方法,Hong Mei Wang [12] 建立了改进的子图像分类模型,提出了多目标多元优化方法提高精度,减少计算成本。对于上述提到的粘连颗粒分割方法,都是在前景目标和背景有明显差异或者通过图像预处理能提取出目标物的分割。但在实际生产过程中,由于光照和目标本身的限制,无法提取出目标的全部轮廓,因此一些方法就不能适用。
本文根据生产过程中的实际情况、颗粒的形态,提出了一种基于骨架局部曲率分水岭分割的方法(Skeleton Local Curvature Watershed Segmentation Algorithm, SLCWSA),以克服硬件设备的限制,提升分割准确率,完成大规模复杂粘连目标的分割。最后对单位区域的目标进行计数,反馈生产数据,应用于生产过程中。
2. 分割流程
2.1. 图像预处理
由于工业生产中采集晶圆表面图像时,光照不均匀和颗粒本身特征不统一,采用图像预处理可以基本解决图像的噪声干扰,为下一步图像处理做准备。从电子显微镜获取的三维彩图,不反应图片的特征,需要将图片转化为单维的灰度图像,这里采用加权平均法进行图像灰度化。然后采用带通滤波对灰度图像进行处理。通过Halcon中函数gen_sin_bandpass产生一个正弦形状的带通滤波器,使灰度图像从空间域变换为频域,通过设定好的带通滤波器后,再从频域变换到空间域,从而尽可能的滤除图像背景的噪点。
采用阈值分割方法将滤波处理完后的图像通过全局固定阈值分割处理,从输入图像中选取灰度值满足阈值的像素点,从背景中分离出前景。之后对前景进行特征选择和ROI提取,可提取出颗粒区域。
2.2. 分水岭算法
图像预处理后的图像存在过多的灰度极小区域,直接使用分水岭算法会导致过度分割,所以使用距离变换算法细化轮廓,消除轮廓极小区域。距离变换指输入区域内的所有点计算点到区域边界的距离。对于处理后的颗粒的图像,假设分割后的颗粒区域点的集合为B,背景点的集合为F,对于F的每个点(x, y),它与B的最小距离为式(1),每个值为1的像素的距离变换为0,因为最靠近的非0像素是它本身。
(1)
通过式(1)进行距离变换后,细化了彼此有些粘连颗粒的边缘轮廓。然后使用图像灰度值反转,使得高灰度值的在边缘代表山脉,低灰度值在内部代表盆地。
基于阈值的分水岭算法,第一步在不应用阈值的情况下应用分水岭算法,根据灰度值的拓扑对图像进行分割。较高的灰度值对应于“山脉”,而较低的灰度值对应于“山谷”。在形成的山脉中,分水岭被提取。第二步加入阈值控制,如果盆地被小于参数threshold的分水岭分隔,则这些盆地将被合并。A和B为相邻两个盆地的最小灰度值,W为分隔两个盆地的分水岭的最小灰度值,如果出现如式(2)情况,则清除分水岭并合并另一个盆地。
(2)
通过阈值分水岭算法后,颗粒物已经基本分割出来,如图1所示,用盆地区域与使用算法前的连通域交集处理,基本分离粘连的颗粒。
2.3. 骨架曲率分析
对于无法通过分水岭算法分割的颗粒,本文采用计算骨架曲率分析方法对未正确分割的颗粒进行分割。以凸性(Convexity)的图像区域特征,对颗粒轮廓区域进行特征选择,根据颗粒的轮廓区域的凸性来筛选可能存在粘连的区域。如图2(a)所示,是经过以上算法处理后,得到颗粒轮廓区域,对它的轮廓曲率进行分析,如图2(b)所示,对于二维形状O,令CH(O)为其最小外接多边形,进行凸性计算如式(3),得到轮廓曲率的凸性。经过对比,独立颗粒的区域轮廓呈圆形,凸性较小,粘连物体轮廓区域顶点较多,凸性较大。通过一个特定的凸性值来选择超过特定值的区域,能很好地筛选出异常的区域。
(3)
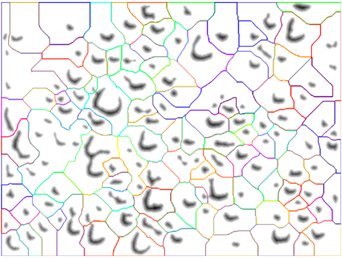
Figure 1. Watershed segmentation results
图1. 分水岭分割结果

Figure 2. Convexity screening
图2. 凸性筛选
区域骨架处理,就是从区域外围往区域中心,利用像素特征,对区域不断腐蚀细化,直到骨架上的每个点都可以看做半径最大圆的中心点,同时该圆仍然完全包含在区域内。对经过凸性筛选后的异常区域进行骨架处理,能最大程度体现颗粒轮廓的基本形态,再将得到骨架转化成halcon的xld轮廓。由此可以开始从颗粒轮廓线条的角度来分析颗粒的粘连状况。
轮廓xld分割使轮廓曲线被分割出几段相邻的曲线,分割后的图像如图3(b)。主要使用Douglas-Peukcer算法进行多边形逼近分割,用MaxLineDist1表示第一次迭代轮廓与近似线之间的最大距离,将起点和终点相连,找出轮廓所有控制点到线段的最大距离。如果最大距离比设定的MaxLineDist1的阀值大,就在对应的最大控制距离轮廓点再次细分成两段,否则将曲线两端点间各点全部舍去。此步的处理的目的是保留了轮廓曲线较大弯曲形态上的点,删除了小弯曲形态上的点,能够使xld轮廓被细分成几个线段,进行具体的曲率分析处理。
根据轮廓端点处的局部曲率连接轮廓,因为粘连颗粒轮廓存在凹点,所以两相邻轮廓端点处,弯曲程度较大,导致曲率突变。本文采用union_cotangential_contours_xld算子,根据轮廓分割后各相邻端点的局部曲率和两轮廓端点处切线的最大角来判断是否连接相邻的两条线。将每段轮廓末端进行圆拟合,在图3(c)轮廓中一端点两侧得到拟合圆C1和C2找到的拟合圆就是两段曲线在此端点处的曲率圆,得到两曲线在端点处的曲率,两轮廓切线的最大角度为S。通过曲率和最大角度S,连接满足这几个阈值的相邻轮廓,如图3(d)为连接后的结果,由此可进一步将粘连部分分割。对晶圆图像中每个容易造成粘连误差的区域遍历,使用此方法进行再次的分析分割。
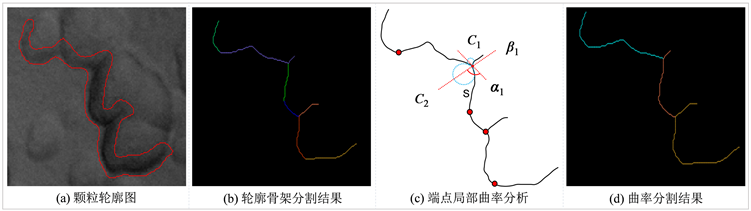
Figure 3. Curvature analysis of contour skeleton
图3. 轮廓骨架曲率分析
最后,将再分割的轮廓图转成区域,与无异常的区域进行合并,标记每个区域中心,遍历区域完成计数。算法整体流程如图4所示。

Figure 4. Algorithm flowchart
图4. 算法流程图
3. 实验结果与分析
3.1. 实验环境与材料
本文采用的实验平台为Halcon,是由德国MVTec公司研发的机器视觉图像处理平台,提供了全面且标准的图像处理函数库。实验材料是某半导体公司2019年7月晶圆生产过程中,通过电子显微镜对晶圆背表面拍摄获取的局部图像,表面颗粒是晶圆生产中的金属离子杂质,该离子呈现类圆形,表面不规则,大小不统一,且彼此间存在粘连。
3.2. 实验内容
为验证本文的方法的稳定性和准确度,对相同条件下采集的6张晶圆表面颗粒图片,进行分割计数测试,分别统计距离变换的分水岭算法和本文算法与人工计数的准确率,其中,每张图片进行相同的图像预处理,之后用不同的算法进行粘连颗粒分割后,标记出颗粒的具体位置,计算出一张图像内的颗粒总数与人工计数计算准确率。图像使用分水岭算法后如图5(a),分割出一些不粘连和粘连不严重的颗粒。仍有一部分颗粒阴影在同一侧且灰度值无明显变化,无法通过分水岭算法分割,如图5(b)、图5(c),使用本文的轮廓骨架局部曲率分析法,进行再一步分割,分割效果如图5(d)、图5(e)。

Figure 5. Adhesion particle segmentation result
图5. 粘连颗粒分割结果
3.3. 实验结果
对两种方法最后进行颗粒计数,为了更直观的看到不同方法下的计数结果,绘制了不同方法下的对比图像,图6(a)为分水岭算法,图6(b)为在本文方法,使用本文方法后可以看出,对颗粒的统计数量更准确,粘连严重的颗粒也能基本分割,减小误差。
对6个晶圆表面图片样本,使用不同算法测试结果如下表。为了更直观的体现本文算法更贴近实际人工标注计数,绘制图7。
结果如表1,每个算法计算出的颗粒数以人工计数为标准,计算准确率。从准确率可以看出,对于此类晶圆表面颗粒物的检测计数,本文算法的准确率均高于经典分水岭算法。本文算法综合准确率为96.7%,经典分水岭算法准确率为88.2%,本文算法在准确率上相对于经典分水岭算法分别提高了8.5个百分点。在图7中可以更直观的体现本文方法计数精度结果都高于分水岭算法,都更贴近人工计数。在分水岭算法基础上,通过颗粒轮廓骨架的局部曲率可进一步进行分割,达到更高的准确率。
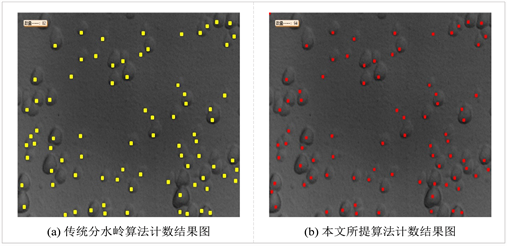
Figure 6. Divide the count results by different methods
图6. 不同方法分割计数结果

Table 1. Comparison results of three algorithm segmentation counts
表1. 三种方法切分计数对比结果
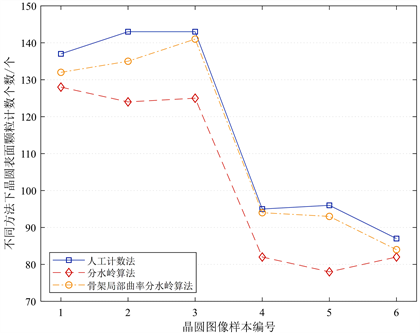
Figure 7. Comparison results of the three methods
图7. 三种方法对比结果
4. 结语
本文基于Halcon视觉平台在分水岭算法分割粘连图像的基础上,提出对异常的粘连区域筛选,区域轮廓骨架的局部曲率分析进行再度分割,从而使粘连颗粒分割得更准确。本文提出的方案对检测目标与背景部分特征相似,无法提取目标的完整轮廓时,有很好的适应性。并且不受目标物的大小和形状限制,能够应对复杂背景或目标特征不明显下的图像分割。同时能够将图像可能粘连区域和未粘连区域进行区分,对于图像分析、粘连物体分割提供了很好的处理方法。最后完成了颗粒自动计数的要求。有效解决了分水岭算法适应性差的问题。为粘连物体和分割和计数提供了一种思路。
基金项目
国家重点研发计划资助(2017YFB1103003)。
文章引用
吕众鑫,冉顺义. 基于骨架局部曲率分水岭算法的颗粒特征识别分割方法
Particle Feature Recognition and Segmentation Method Based on Skeleton Local Curvature Watershed Algorithm[J]. 计算机科学与应用, 2021, 11(09): 2252-2259. https://doi.org/10.12677/CSA.2021.119230
参考文献
- 1. 姚梦洁. 基于连通域的复杂背景下粘连单元分割算法[J]. 软件导刊, 2021, 20(4): 226-230.
- 2. 倪志强, 叶明. 基于分水岭变换的粘连颗粒图像分割方法[J]. 计算机系统应用, 2014, 23(6): 93-97.
- 3. 戴丹. 基于改进分水岭算法的粘连颗粒图像分割[J]. 计算机技术与发展, 2013, 23(3): 19-22.
- 4. 郭观凯, 刘伟, 余玲玲, 许浩文, 王文静. 基于改进FAST与分水岭算法的颗粒图像分割[J]. 中国粉体技术, 2019, 25(2): 61-67.
- 5. 李冰, 何超. 基于背景骨架特征的粘连米粒图像分割算法[J]. 计算机应用, 2017, 37(S2): 198-202.
- 6. 方忠玉. 基于骨架的物体分离算法研究[D]: [硕士学位论文]. 上海: 东华大学, 2016.
- 7. 何亚茹, 葛洪伟. 视觉显著区域和主动轮廓结合的图像分割算法[J/OL]. 计算机科学与探索, 2021: 1-19. http://kns.cnki.net/kcms/detail/11.5602.tp.20210311.1501.002.html, 2021-03-12.
- 8. 阳波. 粘连物体分离过程中的边界凹点定位研究[J]. 计算机工程与应用, 2008, 44(26): 239-241.
- 9. 童振, 蒲立新, 董方杰. 基于改进分水岭算法和凹点搜索的乳腺癌粘连细胞分割[J]. 生物医学工程学杂志, 2013, 30(4): 692-696.
- 10. Zhang, H., Tang, Z., Xie, Y., et al. (2019) A Watershed Segmentation Algorithm Based on an Optimal Marker for Bubble Size Measurement. Measurement, 138, 182-193.
- 11. Elaziz, M.A., Oliva, D., Ew Ee, S.A.A., et al. (2019) Multi-Level Threshold-ing-Based Grey Scale Image Segmentation Using Multi-Objective Multi-Verse Optimizer. Expert Systems with Applica-tion, 125, 112-129.
- 12. Wang, H.M., Lu, L., Liu, X.L. and Gao, F. (2013) A Method Based on the Morphology of Lead-Free Solder Powder Adhesive Particle Segmentation. The 4th International Conference on Manufacturing Science and Engineering (ICMSE2013), Dalian, 30-31 March 2013, 2621-2625.