Dynamical Systems and Control
Vol.
11
No.
03
(
2022
), Article ID:
53879
,
7
pages
10.12677/DSC.2022.113015
基于空压机的永磁同步电机矢量控制研究
曾燕平1,2,李红鸣1,詹雷军1,梅光磊1,李杰1,虞洪文1,陈超2
1浙江象睿机电设备有限公司,浙江 衢州
2衢州职业技术学院,浙江 衢州
收稿日期:2022年6月30日;录用日期:2022年7月11日;发布日期:2022年7月21日

摘要
空压机是工业生产过程中必不可少的关键设备,永磁同步电机作为空压机的核心部件,优化电机的控制技术可以有效地提高空压的运行效率,因此有必要对空压机的永磁同步电机进行研究。本文对空压机负载进行了分析,建立了永磁同步电机模型,采用了PI速度环、PI电流环矢量控制。通过输入负载扭矩和参考转速进行了仿真分析,结果显示在空压机负载扭矩有波动的情况,本文的电机矢量控制效果较好,电机转速和转矩能够平稳地输出。
关键词
空压机,永磁同步电机,仿真建模

Research the Permanent Magnet Synchronous Motor Vector Control Based on the Air Compressor
Yanping Zeng1,2, Hongming Li1, Leijun Zhan1, Guanglei Mei1, Jie Li1, Hongwen Yu1, Chao Chen2
1Zhejiang Xiangrui Electromechanical Equipment Co., Ltd., Quzhou Zhejiang
2Quzhou College of Technology, Quzhou Zhejiang
Received: Jun. 30th, 2022; accepted: Jul. 11th, 2022; published: Jul. 21st, 2022

ABSTRACT
The air compressor is indispensable key equipment in the industrial production process. The permanent magnet synchronous motor is the core component of the air compressor. Optimizing the control technology of the motor can effectively improve the operation efficiency of the air compressor. Permanent magnet synchronous motor is studied. This paper analyzes the air compressor load, establishes a permanent magnet synchronous motor model, and adopts PI speed loop and PI current loop vector control. The simulation analysis is carried out by inputting the load torque and the reference speed. The results show that the motor vector control effect of this paper is better, and the motor speed and torque can be output stably when the load torque of the air compressor fluctuates.
Keywords:Air Compressor, Permanent Magnet Synchronous Motor, Simulation Modeling

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
空气压缩机是一种将气体压缩从而提高气体压力或输送气体的机器,它是将电动机的机械能转换成气体压力能的装置。由于气动控制系统具有易于控制、结构简单、成本低、可大幅度提高生产效率的优点,因此空压机在传统制造、智能制造等工业生产领域有着广泛的应用,是许多工业生产过程中必不可缺的关键设备 [1]。空压机的核心部件是带动其运转的驱动电机,通过优化电机的制造技术和控制技术提高电机的效率,从而可以有效地提高空压机的运行效率,达到节能减排的目的。目前我国的传统制造行业中,大部分压缩机采用感应电机作为驱动电机。感应电机具有不含永磁体,结构简单的优点,但也具有效率低,浪费能源严重的缺点。江苏大学对车用燃料电池高速电动空压机进行了稳定性控制的研究 [2],嘉兴学院对三种不用型式的高压直联压缩机进行了仿真研究 [3],国内的很多高校及科研院所都对空压机的结构及控制进行了大量的研究。
永磁同步电机(PMSM)具有低噪声、高效率、高功率密度、体积小、质量轻、启动电流小、节能效果明显等优点 [4]。随着电机制造技术和电子集成技术的提高,电机控制理论以及控制处理器的发展,永磁同步电机在交流驱动和控制领域应用越来越广泛。从数控制造到电动汽车,从工业机器人到家用空调,从工业生产到日常生活,随处可见永磁同步电机的应用,其在空压机上的应用也越来越广泛 [5]。要实现对永磁同步电机精确的闭环控制就必须获得其转子的位置信息和转速信息。可以通过使用光电编码器、磁性编码器、旋转变压器等传感器获取转子的位置和速度信息,但使用传感器有一定缺陷,当电机在高温、粉尘等恶劣环境下运行,传感器容易失效,使用传感器会增大电机的成本,并且增加了电机控制的线路,使电机控制更复杂。由于有以上缺点,电机无传感器控制技术已经成为近些年的一个研究热点,也是电机技术发展的趋势,无线传感器控制技术对永磁同步电机在各个领域的应用具有重要意义。
矢量控制理论也叫解耦控制或者定向控制,是西门子工程师F. Balschk在20世纪70年代初期提出的 [6]。其核心思想是模拟直流电机的解耦控制策略,将电机三相定子电流根据磁场等效原则进行坐标转换,转换为两相旋转坐标系下的直流分量,以此来实现电机转矩和励磁电流的解耦。矢量控制可实现磁链和转矩的独立控制,是目前应用最为广泛的控制策略。
2. 空压机负载力矩分析
本文的空压机采用直联空压机 [7],其示意图如图1所示,x1、x2表示高、低压活塞位移;α1、α2表示高、低压偏心轮转角;r1、r2高、低压偏心轮的偏心距;l1、l2表示高、低压连杆长度;β1、β2表示高、低连杆与中心线夹角。直联空压机工作时,活塞会受到气体力、活塞往复惯性力和摩擦力的作用,这些力沿着气缸中心轴线作用在活塞上,通过活塞作用在连杆上。作用在连杆上的力可以分解为垂直于曲柄方向的切向力和沿着曲柄方向的法向力,切向力作用在主轴上的力矩就是空压机的负载力矩,用公式(1)表示。
(1)
式中:T表示沿着曲柄方向的切向力;r表示垂直于曲柄方向的偏心距;α表示电动机轴转角;λ表示曲柄半径与连杆长度之比。

Figure 1. Straight league air compressor
图1. 直联空压机示意图
3. 永磁同步电机模型
永磁同步电机在三相静止坐标系下,三相对称正弦交流电通过定子绕组时将产生一个旋转得正弦磁场。永磁同步电机得电压方程用公式(3)表示。
(2)
式中: 、 、 表示定子A、B、C三相瞬时电压值; 、 、 表示定子A、B、C三相瞬时电流值; 、 、 表示定子A、B、C三相瞬时磁链值; 为定子相电阻。
在三相静止坐标系下,电机的转子电、磁不对称,建立的数学模型是非线性时变的,该模型分析和控制都比较困难 [8]。
为了简化分析,首先通过clark变换,将三相静止坐标系转化为 轴坐标系,clark变换用公式(3)表示。
(3)
当 时,clark变换为等功率变换;当 时,clark变换为等幅值变换。在本文中,采用等幅值变换。
其次,通过park变换将 轴坐标系转化为dq轴坐标系,park变换用公式(4)表示。
(4)
在dq坐标系下,永磁同步电机的状态方程用公式(5)表示。
(5)
式中: 、 为、轴上的电流;R为定子电阻; 、 为轴上 、 的电感; 为极对数; 、 为 、 轴上的电压; 为电机电角速度; 为磁链。
电机转子机械方程用公式(6)表示,其中电磁转矩 与电流之间的关系用公式(7)表示。
(6)
(7)
4. 永磁同步电机矢量控制
永磁同步电机三相定子电流包含了具有耦合关系的转矩分量与励磁分量,要实现矢量控制,就需要对定子电流里的转矩分量和励磁分量进行解耦,使其等效为直流电机。在上一节中的坐标系变换把三相静止坐标系转换为两相旋转坐标系则实现了电机的解耦,能够通过矢量控制对电机转矩与磁链独立控制。本文采用 的矢量控制方法,即dq两相坐标系下直轴电流分量为零,只控制电流分量 。这控制控制方法电流效率高,方法简单易行,能够使电机获得更良好的控制性能。
基于 的矢量控制方法的控制流程如图2所示。该控制系统包含速度环和电流环,参考转速与电机实际转速的差值作为转速环PI调节器的输入,控制调节后输出电流指令。本文采用 的矢量控制方法,因此图2中的 ,永磁同步电机实际输出的三相电流经过park变换、clarke变换后得到 、 反馈值,其与转速环输出电流指令作差后将误差值输入电流PI调节器的输入,控制调节后输出dq轴上的电压信号。dq轴电压信号经过park逆变换、clarke逆变换得到三相交流电输入到SVPWM脉宽调制模块,脉宽调制模块产生驱动信号控制电桥从而产生三相交流电输入永磁同步电机,驱动电机转动,完成了对电机的矢量控制。
在前文中分析了空压机的负载力矩,在空压机中的永磁同步电机力矩控制本文采用直接转矩控制,根据空压机负载力矩的大小,通过调整电机电压矢量开关控制电磁力矩的输出。本文采用simulink中的永磁同步电机如图3所示,ABC三相交流电的控制采用上文的矢量控制方法, 为空压机的负载力矩输入到电机模块进行控制。
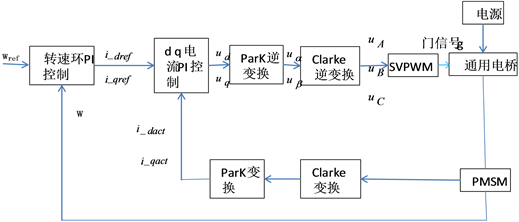
Figure 2. Vector control system block diagram
图2. 矢量控制系统框图
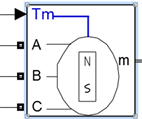
Figure 3. Permanent magnet synchronous motor model in simulink
图3. simulink中PMSM模型
5. 仿真分析
电机模型采用simulink中的三相永磁同步电机,其参数为:定子电阻Rs = 1.132Ω;电感Ld = 12.38 × 10−3 H;电感Lq = 15.72 × 10−3 H,转动惯量J = 1.79 × 10−3 kg∙m2;电机对极数为4。设定转速为1500 rpm/min,通过空压机给电机一个变化的负载扭矩,其仿真结果如图4~7所示。图4为电机根据空压机给定的负载输出扭矩情况,图5为电机根据设定转速的输出情况,在仿真开始阶段输出扭矩和转速有较大的波动,但是波动时间很短就达到了稳定,有较好的适应性。图6、图7为电机的输出电流情况,输出的dq轴电流用于速度环和电流环的矢量控制,输出的三相轴电流可以看出电机内部电流具有一定的周期性和对称性。仿真结果表明,本文建立的基于空压机的永磁同步电机模型具有一定的合理性,其输出结果表明本文的电机矢量控制能够很好地控制电机的转速和输出扭矩。

Figure 4. Permanent magnet synchronous motor output torque
图4. 永磁同步电机输出转矩
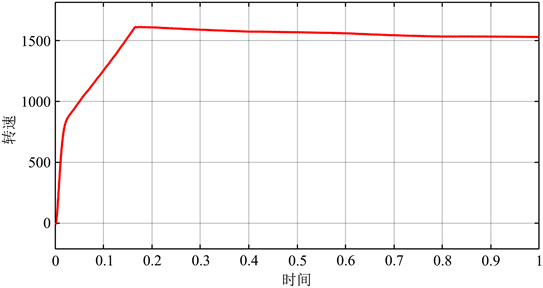
Figure 5. Permanent magnet synchronous motor output speed
图5. 永磁同步电机输出转速
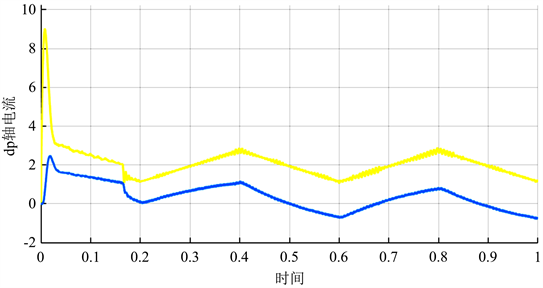
Figure 6. dq shaft current permanent magnet synchronous motor
图6. 永磁同步电机dq轴电流

Figure 7. Three-phase permanent magnet synchronous motor current coordinate system
图7. 永磁同步电机三相坐标轴电流
6. 结论
本文首先对空压机的负载力矩进行了分析,其次建立了基于空压机的永磁同步电机模型,并对电机电流的坐标系进行park变换、clark变换,把三相静止坐标轴上的交流电转换为dq轴上的交流电,并进行矢量控制,整个矢量控制过程包括PI速度环控制和PI电流环控制。最后对建立的模型进行仿真验证,通过空压机给永磁同步电机负载和转速信号,仿真结果显示,本文建立的模型及控制方法,永磁同步电机的速度、扭矩跟随情况较好,响应较快,波动时间短。因此,本文对空压机永磁同步电机的建模及控制具有较好的效果,对后续的研究具有一定的借鉴意义。
文章引用
曾燕平,李红鸣,詹雷军,梅光磊,李 杰,虞洪文,陈 超. 基于空压机的永磁同步电机矢量控制研究
Research the Permanent Magnet Synchronous Motor Vector Control Based on the Air Compressor[J]. 动力系统与控制, 2022, 11(03): 133-139. https://doi.org/10.12677/DSC.2022.113015
参考文献
- 1. 宋茂良. 空压机用永磁同步电机无传感器控制研究[D]: [硕士学位论文]. 武汉: 湖北工业大学, 2020.
- 2. 胡乐利. 车用燃料电池超高速电动空压机稳定性控制[D]: [硕士学位论文]. 镇江: 江苏大学, 2021.
- 3. 钟美鹏, 黄风立. 三种不同型式的高压直联压缩机仿真研究[J]. 压缩机技术, 2010(6): 4-7.
- 4. 叶廷胜. 基于滑模观测器的永磁同步电机模型预测控制系统研究[D]: [硕士学位论文]. 南昌: 南昌航空大学, 2020.
- 5. 刘宇博. 基于滑模观测器的永磁同步电机控制系统关键技术研究[D]: [博士学位论文]. 哈尔滨: 哈尔滨理工大学, 2020.
- 6. 张耿. 全无油涡旋空压机永磁同步电机无感控制系统设计[D]: [硕士学位论文]. 合肥: 合肥工业大学, 2018.
- 7. 钟美鹏, 郑水英, 潘晓弘. 直联式空压机PWM变占空比控制[J]. 农业机械学报, 2009, 40(5): 213-217.
- 8. 何凤有, 鲍卫宁, 汤瑒, 刘西超. 基于模糊PID控制器的空压机恒压供气系统的设计[J]. 工矿自动化, 2010, 36(1): 91-93.