Journal of Aerospace Science and Technology
Vol.05 No.02(2017), Article ID:21209,19
pages
10.12677/JAST.2017.52012
Pneumatic Shape Design and Pneumatic Analysis of Wing Body Fusion Aircraft
Feng Wu, Xiyang Wang, Shanyuan Jiang, Xueyu Cao, Lingxian Shi
School of Aircraft Engineering, Nanchang Hangkong University, Nanchang Jiangxi

Received: Jun. 9th, 2017; accepted: Jun. 27th, 2017; published: Jun. 30th, 2017

ABSTRACT
This article based on the design experience of wing body fusion aircraft before designed a wing body fusion aircraft aerodynamic shape, and analyzed initial model of the wing fusion aircraft with different wind speed and angle of attack. In the process of research, CATIA was used to generate the initial model of wing body fusion aircraft. Taking into account the specific size of the aircraft, the choice of airfoil and for weight, the cruise speed of the aircraft is designed to be 30 m/s. Through the wind tunnel experiment and FLUENT computational fluid dynamics software calculations, we can get the initial model of wing fusion aircrafts speed cloud and pressure cloud and the distribution of the surrounding flow field. On the basis of FLUENT computational fluid dynamics software and the distribution of the surrounding flow field, four improved models based on the initial model were identified: Eddy swirl model, wingtip winglet model, canyon model, and flat tail model. This paper researched the aerodynamic performance of the four improved wing-body fusion aircraft models at different angles of attack and wind speed (including lift coefficient, drag coefficient, lift drag ratio). The idea of the impact is to establish an accurate improved swirl model, to improve the wing winglet model, to improve the duck wing model, to improve the flat tail model. The research has used CFD to calculate the aerodynamic characteristics of the airplane at different wind of angles at −4˚ to 14˚, and analyzed the aerodynamic characteristics of the aircraft at different speeds and angles of attack. It can provide a theoretical basis for the safe and efficient flight of the aircraft. This research compared the aerodynamic characteristics of the improved four models with the initial model at different speeds and angles of attack. And then it used the aerodynamic characteristics of different improved models under different flight states to explore the use of the improved model and its development value.
Keywords:Wing Body Fusion Aircraft, FLUENT Computational Fluid Dynamics, Cruise Speed, Aerodynamic Characteristics
翼身融合体飞机气动外形设计及分析
吴峰,王细洋,江善元,曹雪宇,石领先
南昌航空大学,飞行器工程学院,江西 南昌
收稿日期:2017年6月9日;录用日期:2017年6月27日;发布日期:2017年6月30日

摘 要
本文根据以往翼身融合体飞机的一些设计经验,设计了一种翼身融合体飞机气动外形,并研究分析了翼身融合体飞机初始模型在不同风速和迎角的情况下的气动特性。利用CATIA生成翼身融合体飞机初始模型,由于考虑到该型飞机的具体尺寸、选用翼型以及制作重量,所以飞机的巡航速度设计为30 m/s,通过风洞实验和FLUENT计算流体力学软件计算得出初始翼身融合体飞机模型的速度云图和压力云图以及初始模型飞机周围流场分布情况,然后根据FLUENT计算流体力学软件得出的初始模型流场分布情况,确定4种在初始模型基础上经过改进的模型,分别为涡流器模型、翼梢小翼模型、鸭翼模型、平尾模型,研究经过改进的4个模型气动特性(包括升力系数,阻力系数,升阻比)随速度和迎角的影响的思路是:建立精确的改进涡流器模型、改进翼梢小翼模型、改进鸭翼模型、改进平尾模型,利用CFD计算流体力学软件计算在不同风速迎角分别从−4˚到14˚下飞机的气动特性,并分析在不同速度和迎角下的飞机的气动特性随迎角的变化规律,为今后翼身融合飞机的安全高效飞行提供理论依据。并对改进的4种模型在不同速度和迎角下的升阻比等气动特性与初始模型进行对比,再根据不同的改进模型在不同飞行状态下所具有的气动特性探讨其改进模型的用途及其发展价值。
关键词 :翼身融合体飞机,FLUENT计算流体力学,巡航速度,气动特性

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
翼身融合是把传统的机身和机翼结构融合在一起的全新的飞机设计概念 [1] 。其设计概念最早在二战末期纳粹德国,由于当时的航空技术条件下解决不了翼身融合体飞机的操纵稳定性问题,导致所有概念设计都停留在纸面上而没能产生真正可以稳定飞行的翼身融合飞机,翼身融合飞机发展因此停滞不前,直到上世纪中后期电子科学技术在飞行控制应用方面的飞速发展,真正意义上的翼身融合体飞机也称飞翼的概念首先由美国航空科研部门在30多年前提出,对于军用翼身融合体无人机来说,其优异的隐身性能和翼身融合飞机飞行阻力的降低也是翼身融合飞机颇受欢迎的另外的一个原因。
但是对于高度翼身融合的飞翼布局飞机来说也存在以下主要问题:因为翼身融合体飞机取消了尾翼的设计,因而纵向稳定性下降,甚至静不稳定。取消了垂尾和方向舵,自然横向稳定性也下降,所以飞翼飞机的操纵面不仅要提供足够的控制力 [2] ,同时还要满足飞机的稳定性要求。由于无尾翼,只能依靠飞机的升降副翼和阻力舵进行飞机的操纵,这样使得其横向运动和纵向运动发生了耦合,不像常规布局飞机纵向和横向运动是分开的,这就增加了这种飞机的操控难度,对飞行器的控制系统有更加高的要求,关于翼身融合体飞机控制系统有待进一步研究 [3] 。飞翼布局飞机在起飞着陆时不能像传统布局飞机那样通过襟翼等来增大其升力系数,所以在起飞着陆时需要飞机还具有较大的速度 [4] ,因此飞翼飞机的起飞着陆性能不是很好,尤其是着陆性能 [5] 。
本文通过给对常规翼身融合体飞机的进行气动性能分析,给出了两种设计方案。根据分析的结果对飞机设计不同的改进方案,设计涡流器使得附着在飞翼飞机背面的附面层延迟分离达到增加飞机升力系数及其升阻比的效果,设计可以偏转的平尾以增加飞机的纵向稳定性也可以增加飞机的操纵性 [6] [7] ,这样可以使得传统翼身融合程度很高的飞翼布局式飞机的操纵稳定性较差的缺点得到改善,设计翼梢小翼可以减小飞机的诱导阻力以增大飞机升阻比,并且通过在飞机适当的位置增加鸭翼设计既可以起到增加升力(鸭翼自身产生的升力和鸭翼涡产生的升力)还可以增加飞机在飞行时的机动特性。
2. 翼身融合体飞机气动外形设计要点
2.1. 翼型的选择
飞机翼型选择和设计是飞行器设计前必须进行的一项非常重要工作,它是决定飞机飞行品质的重要原因。对于常规布局飞机来说,飞机产生升力的主要贡献归功与飞机机翼,而机翼又是由翼型所组成。一般要求选用具有高的升阻比的翼型,由于本文的翼身融合体飞机在低速不同迎角下进行气动特性分析,所以一种相对厚度较大、失速特性好的低速翼型是最佳选择 [8] 。
在第一次近似估算中,翼型需达到最大升阻比K时对应的升力系数可以认为翼型的升力系数C近似于矩形机翼的升力系数CL,当飞机处于巡航状态时,重量等于升力,因此所需的设计升力系数可以按下式求得:
 (1)
(1)
 (2)
(2)
式中q表示动压,是速度和高度的函数,由于本文所研究的翼身融合体飞机模型设计飞行高度低于1000米,所以可以不考虑高度的影响。初始模型的设计尺寸较小,所以机翼载荷W/S对飞机展向所产生的弯矩不大,即W/S也有较大的选择范围,我们可以根据以往翼身融合体飞机载荷设计选取合适的W/S。
静稳定裕度是传统飞翼布局关注的焦点,因为翼身融合体飞机不一定具有正的稳定裕度 [9] ,这对飞机的操作控制系统提出了较高的要求,操稳特性比较差是传统翼身融合体飞机的很大弱点,所以在设计该新型翼身融合体飞机时,本文采用失速特性较好的S3010翼型。
因为S3010翼型在具有良好的失速特性的同时,很适合低速飞行的无人机,对飞翼布局的飞机非常适合 [10] 。该翼型展开位置最大弯度10.31%在24.6%翼弦,最大曲面2.82%在39.6%翼弦。
2.2. 翼型压力分布
在用坐标表示机翼压力分布时,一般采用压力系数(CP),其定义为:
 (3)
(3)
在式中 和
和 分别表示远方气流的压强和速度。
分别表示远方气流的压强和速度。
根据伯努利方程有:
 (4)
(4)
这样压力系数可以写成:
 (5)
(5)
式中的V是某点的流速。
压力系数CP是无量纲参数。在低流速时,根据连续方程,有 。当如飞机翼型的形状被确定,翼型的流线谱就不改变,翼型某点的流速就是一确定值。由上式可知,翼面上该点的压力系数(CP)也是一确定值。这表明,翼面各点的压力系数与动压没有关系而主要取决于翼型的形状和迎角。
。当如飞机翼型的形状被确定,翼型的流线谱就不改变,翼型某点的流速就是一确定值。由上式可知,翼面上该点的压力系数(CP)也是一确定值。这表明,翼面各点的压力系数与动压没有关系而主要取决于翼型的形状和迎角。
如图1是坐标表示法表示的是S3010翼型的压力分布图。图上CP等于0的点就是它的驻点,CP最小的点就是最低压力点。
从机翼的压力分布图可以看出,飞机下表面提供的升力远不如飞机的上表面,机翼上表面提供了机翼的大部分升力,特别是在机翼上表面靠近前段位置,机翼上表面吸力所产生的升力可以达到机翼总升力的60%到80%;而翼型下表面对升力的贡献只有20%到40%,当翼型在没有迎角的情况下,或者是下翼面比较凸出的翼型,下翼面可能形成向下的吸力,在这种情况下,机翼的升力完全由机翼的上翼面所产生。
2.3. 飞机外形参数的确定
本文的设计点是以飞机拉起离地和巡航速度状态开始,根据所统计的以往飞翼布局飞机(X47B、波音797、神经元)的基本参数和指标,结合翼身融合体飞机布局的优势和特点,在满足设计点升力系数和有效载重量等约束的前提下 [3] ,选点一个合理的设计点,探讨各种气动布局的设计(如:机翼外形参数,中心体的参数,翼型的选择)对初始模型气动特性的影响,以初始模型巡航速度30 m/s和飞机的尽量高的升阻比(V K)为目标 [3] ,确定初始模型建模方案。根据对目前的翼身融合体飞机的统计研究和学校风洞的实验条件,本文提出了初始模型如下设计指标:
(1) 初始模型重量在1 kg左右。
(2) 初始模型巡航速度在30 m/s左右。
(3) 初始模型巡航高度在1000米以下低空。
(4) 在巡航状态下初始模型能够处于自配平状态,初始模型的俯仰力矩在零附近。
(5) 考虑到学校风洞实验室实验条件(风洞实验段尺寸大小和,测力天平的最大负荷),初始模型翼展的宽度限定在70厘米以内。
3. 翼身融合体飞机初始模型建立及数值计算
3.1. 初始模型生成模型参数
本文使用关于模型建立的问题,最关键的核心在于翼型和飞机的基本参数的选择,在查阅了包括F-117、X47B、神经元等众多国外大型飞翼布局飞机的设计参数以及近几年来国内研制的飞翼布局无人机例如:利剑、天弩等设计参数。在兼顾翼身融合体飞机布局设计规律的同时突出本课题的研究目的,根据上一章翼身融合体飞机布局设计参数,本文建模的对象是初始翼身融合体飞机,拟定了以下设计要求:本文设计的翼身融合体飞机试验模型如图2所示,外形参数列入表1。
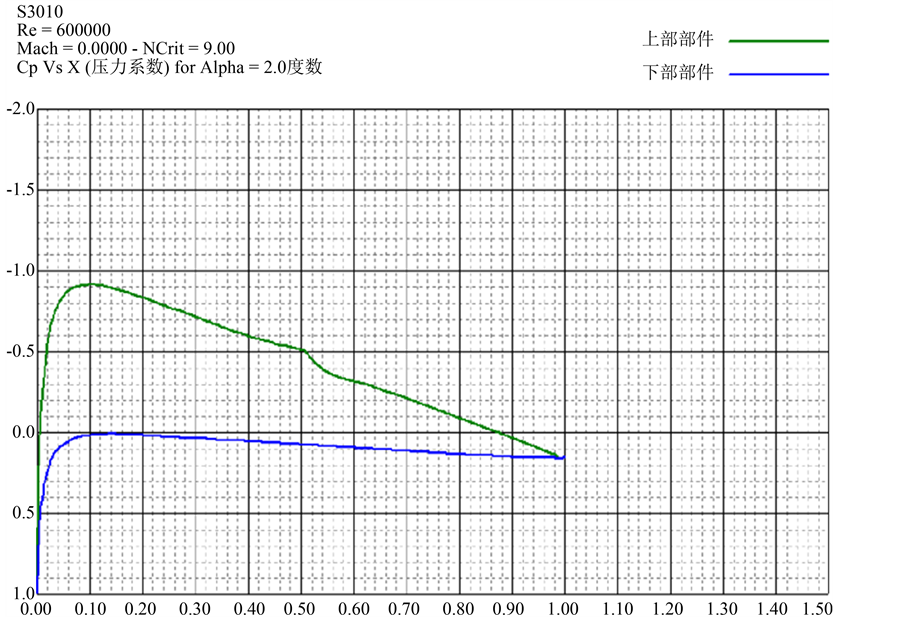
Figure 1. S3010 airfoil pressure coefficient distribution
图1. S3010翼型压力系数分布

Figure 2. The initial model of wing body fusion aircraft
图2. 翼身融合体飞机初始模型

Table 1. The parameters of wing body fusion aircraft
表1. 翼身融合体飞机参数
3.2. 初始模型数值计算
如果计算整个翼身融合体飞机迎角连续偏转的过程,毫无疑问涉及到气动特性的工作量非常大。基于简化过程的考虑,在保证准定常的情形下,可以通过计算从−4˚到14˚每间隔2˚迎角来分析整个过程。
流体力学计算原理
(a) 质量守恒方程
 (6)
(6)
(b) 动量守恒方程
 (7)
(7)
公式中,说要说明的是P表示的是作用在流体上的静压,g为作用在流体上的重力的体积力,F为外部其他的体积力。
其中, 微单元的粘性应力张量,牛顿流体表达
微单元的粘性应力张量,牛顿流体表达 为:
为:
 (8)
(8)
(c) 能量守恒方程
 (9)
(9)
公式中,E表示的是流体内部总的能量,总能量中包括动能和内能量部分之和。
公式中,h表示的是焓,通常情况下对于理想气体为:
 (10)
(10)
RNG k-e湍流模型
由于考虑到翼身融合飞机稳定性和失速特性,所以本文对该型翼身融合体飞机的失速特性进行重点分析,模拟飞机机在较大迎角下周围的流场情况,因为翼身融合体飞机背面形成紊流的可能性较大。所以本文采用RNG k-e紊流模型比较合适,有利于提高计算的精度。RNG k-e湍流模型求解需要11个控制参数,但其中4个参数与标准k-e湍流模型参数默认值相同。因此,RNG k-e湍流模型可以输入7个控制参数:
 ——RNG湍流模型的常数
——RNG湍流模型的常数
 ——RNG湍流模型常数
——RNG湍流模型常数
 ——湍流动能耗散率常数
——湍流动能耗散率常数
 ——湍流常数
——湍流常数
 ——湍流动能方程中的施密特数
——湍流动能方程中的施密特数
 ——湍流动能方程中的施密特数
——湍流动能方程中的施密特数
 ——应变率参数
——应变率参数 的渐近值
的渐近值
表2列出了RNG k-e湍流模型控制参数的默认值。对于RNG湍流模型,转动常数 。
。
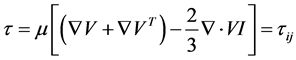
3.3. 初始模型气动数据采集
在条件为不同来流速度V:18 m/s、20 m/s、25 m/s、28 m/s、30 m/s,不同迎角α分别为−4˚、−2˚、0˚、2˚、4˚、6˚、8˚、12˚、14˚、16˚下的气动特性(图3~图5)。
Table 2. Selection of 7 control parameters for RNG k-ε Turbulence Model
表2. RNG k-e湍流模型的7个控制参数选取

Figure 3. Initial model lift coefficient’s variation with angle of attack
图3. 初始模型升力系数随迎角的变化

Figure 4. Initial model drag coefficient’s variation with the angle of attack
图4. 初始模型阻力系数随迎角的变化
3.4. 初始模型气动特性分析
下图初始模型30 m/s,迎角为0˚的速度和压力云图(图6、图7)。
由计算结果和图表可以看出:
初始模型在相同的速度下,升力系数随着迎角(约在10˚范围内时)的增大而增大。阻力系数随迎角的增大也增大(大于10˚过后急剧增大),升阻比的最大值在迎角为2˚到4˚左右,随着迎角的继续增大升阻比开始减小,由图还可以得出初始模型在30 m/s的时候具有最大的升阻比。
由于本文篇幅有限,仅列出初始模型迎角在0˚速度为30 m/s的云图,从初始模型在迎角为0˚速度30 m/s的压力云图上看,大概在机翼翼的翼根处出现了强吸力区,位于初始模型中心体和梯形翼的结合部。在初始模型的翼尖处,机翼上表面的低压区开始变小,这可能是因为机翼下表面的扰流绕到机翼上表面
Figure 5. Initial model lift drag ratio’s variation with the angle of attack
图5. 初始模型升阻比随迎角的变化
的缘故,增大了飞机的诱导阻力,使得飞机的气动特性变差。在初始模型中心体后部分其负压不如机翼和中心体前部分大,对整机的升力贡献较小。
通过对计算流体力学软件FLUENT和南昌航空大学风洞实验得出的初始翼身融合体的气动数据结果进行了分析,通过分析讨论可以发现初始外形的主要不足有:
翼身融合体飞机的升阻比没有达到预计的水平。最大升阻比出现的迎角有些偏大,但是计算得到的阻力系数也有些偏大。以初始模型在30 m/s的流速下飞行为例:主要是翼身融合体机身中心体前部产生较大吸力区,加大了逆压梯度区的面积致使阻力过大,所以使最大升阻比不高。
翼身融合体飞机中心体部分上下表面的压力差偏小,导致其对于整个模型的升力贡献比较小,所以可以在翼身融合体的中心体上进行气动外形改进,在中心体比较靠前的地方设计一组花瓣式涡流器,使得飞机在飞行的时候,气流通过涡流器产生旋流,产生的旋流使附着在中心体背面的附面层延迟分离,这样就可以使得翼身融合体飞机中心体部分上下表面的压力差比增大,虽然涡流器的设计会使得飞机的阻力增大,但笔者认为在某些飞行状态下涡流器对升力的贡献比阻力增加要更大,使得翼身融合体模整体模型的升阻比变大,具体结果需要在下一章节对改进模型进行气动特性分析才能知晓。
有压力云图还可以看出在模型的梯形翼翼稍处,模型的上下表面压力差比较小,对整机的升力贡献比较小是因为飞机翼梢下面的气流发生扰流,使得飞机产生了诱导阻力,还降低了飞机的升力。所以笔者认为在翼身融合体模型的翼梢处增加翼绍小翼,对提高初始模型的气动特性有重大意义。
4. 改进翼身融合体飞机气动外形方案二模型建立及数值计算
4.1. 改进模型的建立
根据第3节中对翼身融合体飞机初始模型的计算与分析,可以看出初始模型的升阻比偏低,初始模型中心体尤其是中心体后面部分对整机升力的贡献较小,飞机的俯仰特性不良低头力矩过大,针对初始模型以上的缺点为此本章做了一些改进措施,分别设计了带有涡流器、翼梢小翼、平尾、鸭翼的4个翼身融合体改进模型(图8、表3)。
4.2. 改进模型气动特性分析
经过改进过后的翼身融合体模型机翼参考面积发生变化,通过FLUENT计算流体力学软件得出经过
改进的4个翼身融合体模型在不同风速和迎角状态下的气动特性:
如图9所示5个曲线图分别表示初始模型A、涡流器改进模型B、翼梢小翼改进模型C、鸭翼改进模型D、以及平尾模型E在不同速度和迎角状态下的升阻比。
1、涡流器改进模型


Figure 6. Initial model of surface pressure cloud at 0˚ angle of attack
图6. 初始模型在0˚迎角下模型下表面压力云图

Figure 7. Initial model of the surface velocity cloud at 0˚ angle of attack
图7. 初始模型在0˚迎角下模型上表面速度云图

Figure 8. Initial A, spoiler B, wingtip wings C, duck wing D, flat tail E improved model
图8. 初始A、扰流器B、翼梢小翼C、鸭翼D、平尾E改进模型
Table 3. Spoiler, winged winglets, duck wings, flat tail improved model parameters
表3. 扰流器、翼梢小翼、鸭翼、平尾改进模型参数
如图10所示,由涡流器改进模型在不同速度和迎角状态下的气动特性曲线可以看出当涡流器模型在迎角约小于4˚的时候,在各个速度下的升阻比比初始模型的升阻比有所提高,这是因为涡流器模型在负迎角或者小迎角范围内,花瓣式涡流器在迎面气流中产生了翼尖涡,由于花瓣式涡流器的6片花瓣展弦比较小,因此它产生的翼尖涡的强度相对较强。这种高能量的翼尖涡与其下游中心体的低能量边界层流动混合后,就把能量传递给了边界层,而且涡流器诱导的翼尖涡可以混合中心体上不同速度梯度的流体,以消除机翼表面的附面层堆积增厚,将外围的高能气体补充到附面层,使得中心体上表面处于逆压梯度中的边界层流场获得附加能量后能够继续贴附在机体表面而没有分离。所以在迎角约小于4˚的时候涡流器模型的升阻比优于初始模型。
而当涡流器模型在迎角继续增加时,涡流器产生的翼尖涡距离中心体背面的低能附面层越来越远,这时候涡流器对升力的贡献越来越少,反而涡流器的阻力效应(包括涡流器诱导阻力和摩擦阻力)确增大了,并且随着翼身融合体模型的速度和迎角的增大,阻力产生的效应越明显,升阻比也减小。
2、翼梢小翼改进模型
本文中翼梢小翼改进模型在速度为30 m/s,迎角为2˚左右时具有最大的升阻比,最大升阻比值为10左右,由初始模型的压力云图和翼梢小翼模型的压力云图(图11)可以看出,初始模型在翼尖处的低压区(蓝色区域)比较大,这是由于当翼身融合体初始模型在飞行中,机翼下表面的气流会绕过机翼翼梢流向机翼
上翼面,形成强烈的机翼翼尖涡,带有高能量的涡流从机翼向后沿伸很长一段距离,减小了飞机的有效展弦比而增加了诱导阻力。
初始模型翼梢小翼的设计起到了阻挡机翼下表面的气流绕到上表面的作用,消弱翼身融合体主翼翼尖涡强度,使得翼身融合体飞机机翼有效展弦比增大。
翼梢小翼改进模型在翼尖处的低压区(蓝色区域)比初始模型要大,是因为翼梢小翼能产生翼尖涡,方向刚好与翼身融合体飞机机翼尖涡相反。在黏性耗散的作用下距离很近两股涡相互耗散抵消,这样就达到了减少翼身融合体飞机诱导阻力的目的。
上翼梢小翼的设计还可以使三元畸变流场产生小翼升力和推力方向上的分量。这样延迟了翼身融合体飞机翼尖气流的过早分离以提高其失速迎角 [11] [12] 。
气流流过翼身融合体飞机翼时先是急剧加速,压力变低,然后剧烈的压力恢复,进入变化很大的逆压梯度区,这会使得翼尖边界层提前分离,造成机翼翼尖失速。然而翼梢小翼的设计使得翼梢小翼产生的顺压场与机翼翼稍逆压场相混合,使压力分布变得相对平缓,减小了其逆压梯度。从翼梢小翼模型与初始模升阻比曲线图比较可以看出,设计的翼梢小翼延迟了机翼翼尖处的气流分离,提高翼身融合体飞机的失速迎角。
3、鸭翼模型
当鸭翼改进模型在负迎角和小迎角状态时,鸭翼模型的升阻比与初始模型相当,有时甚至不如初始模型的升阻比高,这是因为鸭翼的设计增加了翼身融合体飞机的浸润面积,使得整机的摩擦阻力增大,由初始模型和鸭翼改进模型在不同风速下的升阻比曲线关系图(图12)可以看出,模型在低速飞行的情况下更加明显。
除此之外,翼身融合体飞机由于其本身的相对厚度比较小,这为鸭翼的设计带来了巨大的挑战,通常鸭翼飞机如歼10、台风、阵风战斗机的鸭翼设计位置比飞机的主翼平面位置要高,本文中翼身融合体由于受到了飞机结构的限制,鸭翼比常规鸭翼布局飞机的位置要低一些,致使鸭翼产生的很大一部分鸭翼涡被浪费,甚至起到了负面作用。
所以综合上诉两点原因来看,在小迎角范围内,改进模型的鸭翼对升力的贡献不及鸭翼对阻力的贡献,所以鸭翼改进模型的升阻比不及初始模型。
当模型的速度和鸭翼迎角开始增大,例如鸭翼改进模型的在30 m/s的速度云图和压力云图可以看出,具有15˚偏转角的鸭翼产生的鸭翼涡使得翼身融合体背面的低压区变大,这是因为在速度和迎角增大时,鸭翼产生的鸭翼涡强度得到了增强,具有教高能量的鸭翼涡克服翼身融合体飞机背面的逆压梯度能力提高了此时鸭翼的作用相当与涡流发生器。
本文通过风洞测力和FLUENT计算流体力学软件显示的基础上对鸭翼对翼身融合体飞机增升及涡系


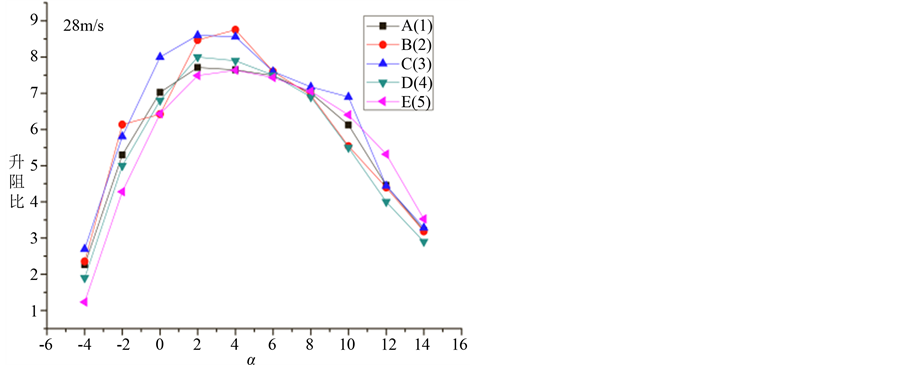


Figure 9. The initial model and its improved model at different speed and angle of attack
图9. 初始模型及其改进模型在不同速度和迎角下的升阻比
干扰机理进行初步探讨。
4、平尾改进模型
在初始翼身融合体上增加平尾的作用相当于气动舵面,增加了初始模型的纵向稳定性能,左右两片平尾同时向上偏转,可以使得飞机形成低头力矩,左右两片平尾同时向下偏转,可以使得飞机形成抬头力矩,这对于提高飞机的起降性能有明显的作用,当左右两片平尾差动可以形成滚转力矩和偏航力矩,


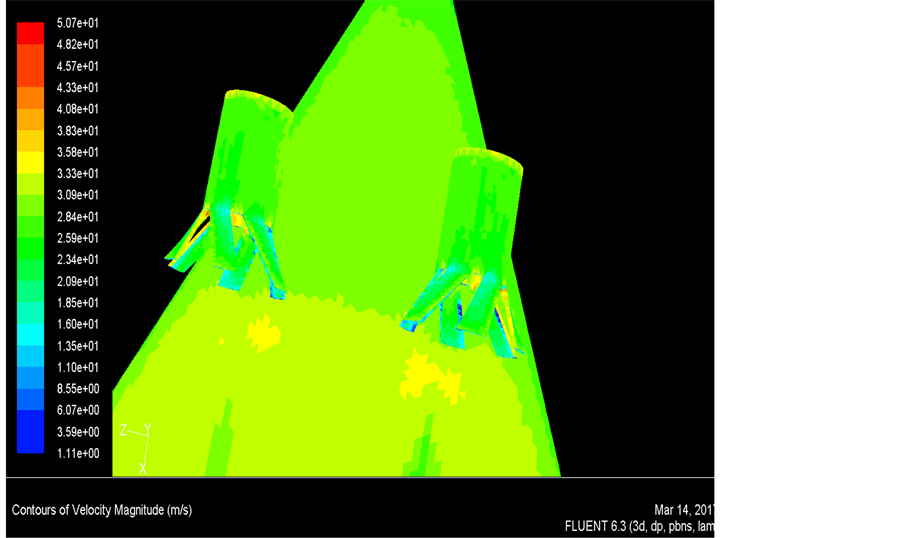
Figure 10. Pressure diagram of the vortex model at 30 m/s clouds and velocity clouds and vortex surface velocity
图10. 涡流器模型在30 m/s时的压力云图和速度云图及涡流器表面速度局部放大云图
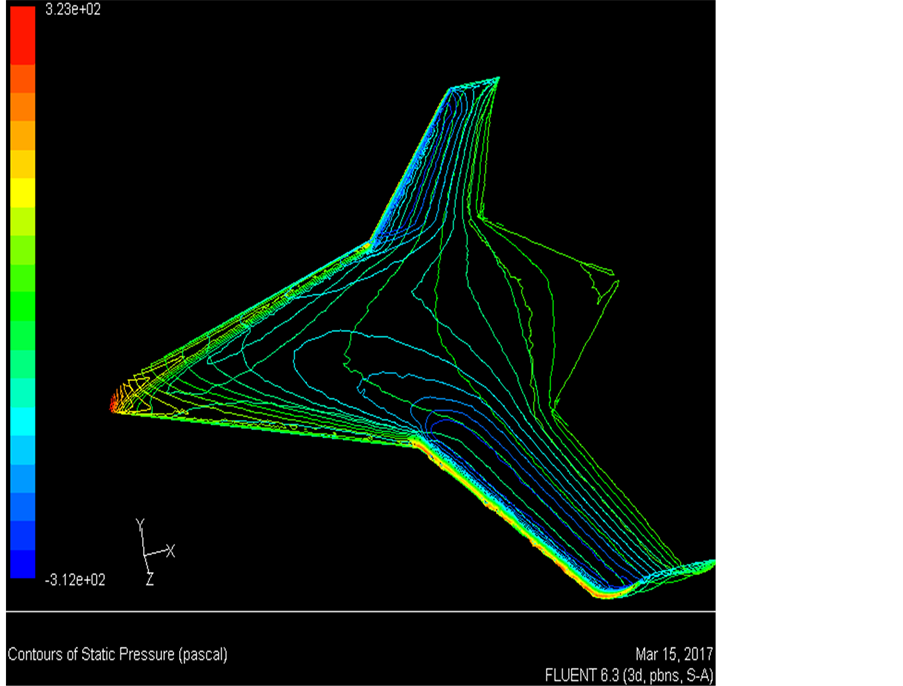


Figure 11. Wing winglet improved model’s speed cloud, pressure cloud and isobars at 0˚ angle of attack
图11. 翼梢小翼改进模型0˚迎角下速度云图、压力云图及等压线图
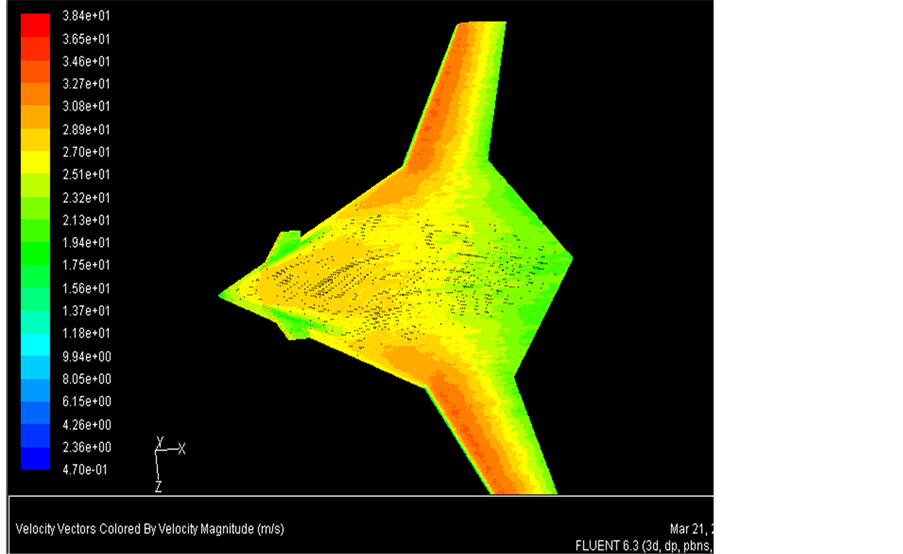

Figure 12. Duck wings improved model’s speed cloud, pressure cloud at 0˚ angle of attack
图12. 鸭翼改进模型0˚迎角下的速度及压力云图
这对于翼身融合体无人攻击机来说有重大的意义,但是由于平尾的设计,这样使得飞机的隐身性能受到影响,平尾对升力的贡献小与阻力,所以飞机的升阻比等气动特性下降(图13、图14)。
4.3. 结论
由FLUENT计算流体力学软件和风洞实验得出涡流器改进模型的迎角在大概小于4˚的范围内,随着
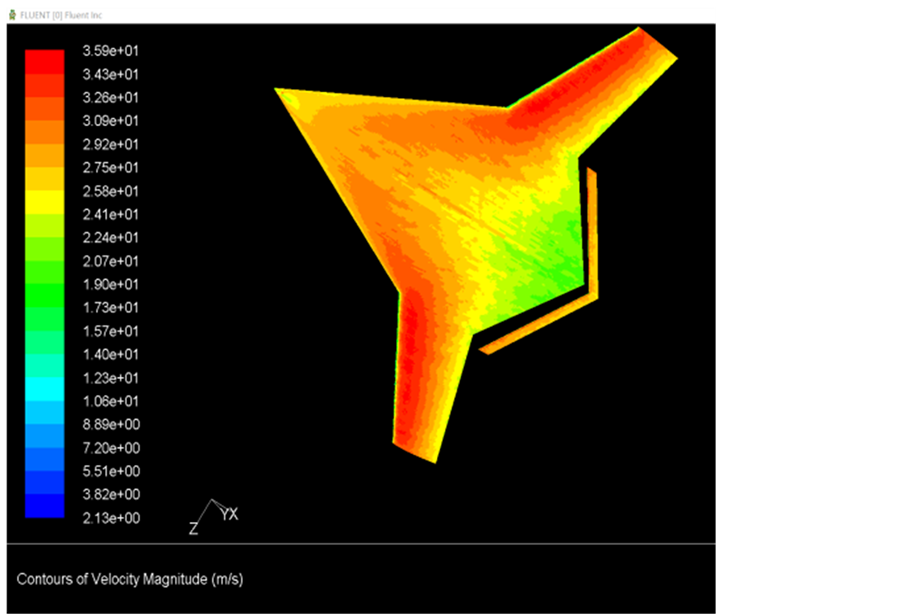
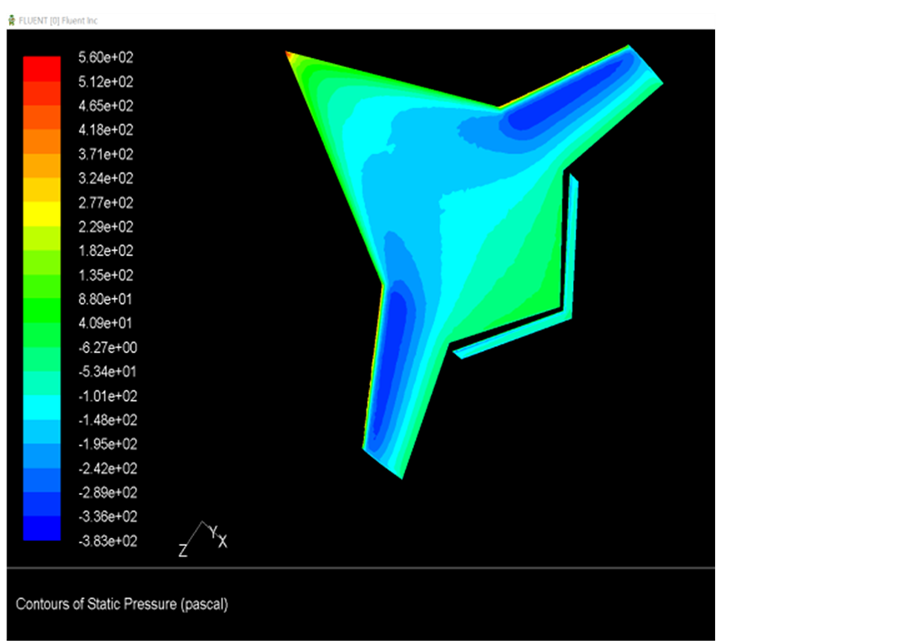
Figure 13. Flat tail improved model’s speed cloud, pressure cloud at 0˚ angle of attack
图13. 平尾改进模型0˚迎角下速度云图和压力云图

Figure 14. Initial model and flat tail model’s pitch performance
图14. 初始模型和平尾模型的俯仰特性
迎角的增大,升阻比也随着增大,并且在小迎角范围内,其升阻比优于初始模型;当迎角小于4˚的时候在18 m/s~30 m/s速度条件下,添加涡流器的翼身融合模型比常规翼身融合模型的升阻比要大,特别是在30 m/s的速度下表现更加明显。
翼梢小翼模型的设计使得翼身融合体机翼翼尖周围下表面的气流在绕到翼尖上表面被阻挡,这样使得飞机上面的低压区变大,减小了飞机的诱导阻力,另外翼梢小翼本身也对整机的升力有一定的贡献,这样使得整机的气动特性,尤其是升阻比得到了很大的提高,尤其是在速度为30 m/s迎角1.5˚左右时,升阻比达到了10左右,但是翼梢小翼的设计使得翼身融合体的隐身性能变差,所以在现有的军用翼身融合体飞机中基本没有翼梢小翼的设计。
本文结合以往鸭翼飞机的设计经验,设计了翼身融合体鸭翼模型,鸭翼的初始角度为6˚,所以在计算鸭翼的迎角时需要在飞机的迎下加上6˚。由鸭翼改进模型的升阻比随迎角的变化曲线可以看出改进鸭翼模型在速度较小的时候,鸭翼对翼身融合体飞机的升力贡献很小,主要靠鸭翼本身产生的升力,但鸭翼的设计也使得飞机的摩擦阻力和干扰阻力增加,致使飞机总的升阻比不如初始模型。但是随着模型的速度和迎角增大,当改进模型的迎角大约大于6˚即鸭翼的迎角大于12˚过后,鸭翼模型的升阻比开始优于初始模型,这说明鸭翼在大迎角状态下对飞机升力的贡献较大,当翼身融合体飞机起飞需要较大抬头力矩时,在主翼前面的鸭翼可以向上偏转在增大飞机抬头力矩的同时不需要增加飞机的配平阻力。
本文平尾的设计并不成功,使得飞机在10˚以内大多数速度情况下升阻比明显减小,飞机气动效率明显变差,在飞机在12˚迎角飞机接近失速迎角的情况下飞机的升阻比比初始模型要好。
但是由飞机的俯仰力矩系数随迎角的变化曲线可以看出飞机的俯仰特性明显增强,这说明平尾的设计使得翼身融合体飞机的操纵性有很大的提升。
文章引用
吴 峰,王细洋,江善元,曹雪宇,石领先. 翼身融合体飞机气动外形设计及分析
Pneumatic Shape Design and Pneumatic Analysis of Wing Body Fusion Aircraft[J]. 国际航空航天科学, 2017, 05(02): 99-117. http://dx.doi.org/10.12677/JAST.2017.52012
参考文献 (References)
- 1. 王健, 郑祥明. 翼身融合无人机外形优化设计研究[J]. 航空工程进展, 2015(4): 442-446.
- 2. 陈元恺. 基于CFD的分布式变后掠翼身组合体气动研究[D]: [硕士学位论文]. 南昌: 南昌航空大学, 2015.
- 3. 江更祥. 浅谈无人机[J]. 制造业自动化, 2014(15): 110-112.
- 4. 陈青. 无尾式无人机总体概念性设计与分析[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2004.
- 5. 仲峰. 飞翼式无人机总体概念性设计与分析[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2008.
- 6. 杨洪平, 王立新. 民用飞机放宽静稳定性的效益分析研究[J]. 飞行力学, 2007(1): 22-25.
- 7. 陈宏. 变高度翼梢小翼对机翼颤振特性影响的初步研究[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2010.
- 8. 明磊. 翼身融合体民用运输机空气动力设计[D]: [硕士学位论文]. 长沙: 国防科学技术大学, 2005.
- 9. 高峰. 翼身融合体飞机的外形设计与气动改进[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2009.
- 10. 李晓勇, 张淼, 鲁素芬, 李栋成, 周涛. 翼身融合飞机的空气动力学研究进展[J]. 飞机设计, 2007(2): 1-9+20.
- 11. 李晓勇, 李栋成, 周涛. 翼身融合飞机的空气动力学研究进展简介[J]. 民用飞机设计与研究, 2006(4): 1-9.
- 12. Irwin, H.P. (1981) The Design of Spires for Wind Simulation. Journal of Wind Engineering and Industrial Aerodynamics, 7, 361-366.