设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投稿
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
AdvancesinAppliedMathematics
A^
ê
Æ
?
Ð
,2023,12(3),1164-1172
PublishedOnlineMarch2023inHans.https://www.hanspub.org/journal/aam
https://doi.org/10.12677/aam.2023.123118
ä
k
Ú
u
¾
Ç
³
Á
£
n
SI
.
Ä
å
Æï
Ä
±±±
§§§
ööö
ëëë
•
â
n
ó
Œ
Æ
ê
Æ
†
Ú
O
Æ
§
H
•
â
Â
v
F
Ï
µ
2023
c
2
21
F
¶
¹
^
F
Ï
µ
2023
c
3
16
F
¶
u
Ù
F
Ï
µ
2023
c
3
23
F
Á
‡
©
ï
á
˜
‡
ä
k
Ú
u
)
Ç
©
ã
1
w
SI
³
Á
£
n
.
§
±
d
•
x
•
k
´
a
³
Á
ê
þ
ˆ
²
L
K
Š
ž
â
é
Ù
?
1
n
ܳ
Á
£
n
ü
Ñ
"
|
^
Filippov
X
Ú
½
5
©
Û
n
Ø
§
©
Û
.
3
Ø
Ó
K
Š
Û
Ä
å
Æ
§
/
•
¾
²
ï
:
Ú
–
²
ï
:
Û
-
½
5
"
ï
Ä
L
²
§
3
Ø
Ó
²
L
K
Š
‰
Œ
e
§
O
\
/
¾
³
Á
Ý
˜
þ
±
9~
à
Á
J
¦
^
þ
U
;
•
³
Á
ê
þ
u
§
Œ
±
•
³
Á
£
n
J
ø
ü
Ñ
Ú
•{
"
'
…
c
Filippov
§
Û
-
½
§
SI
.
§
³
Á
£
n
DynamicsofanSIModelforPest
ManagementwithSaturated
Morbidity
PeiZhou,ShanJiang
SchoolofMathematicsandStatistics,ChangshaUniversityofScienceandTechnology,Changsha
Hunan
Received:Feb.21
st
,2023;accepted:Mar.16
th
,2023;published:Mar.23
rd
,2023
©
Ù
Ú
^
:
±
,
ö
ë
.
ä
k
Ú
u
¾
Ç
³
Á
£
n
SI
.
Ä
å
Æï
Ä
[J].
A^
ê
Æ
?
Ð
,2023,12(3):1164-1172.
DOI:10.12677/aam.2023.123118
±
§
ö
ë
Abstract
Inthispaper,apiecewisesmoothSIpestcontrolmodelwithsaturationincidence
rateisestablished,inordertodrawthemanagementstrategyofchemicalcontrol
onlywhenthenumberofsusceptiblepestsreachestheeconomicthreshold.Using
thequalitativeanalysistheoryofFilippovsystem,theglobaldynamicsofthemodel
indifferentthresholdsandparameterrangesareanalyzed,andtheglobalstability
ofendemicequilibriumandpseudoequilibriumisobtained.Particularly,whenthe
parametersandthresholdsareproperlyselected,thetwoendemicequilibriumpoints
willbebi-stable.Theresearchshowsthatincreasingordecreasingthedosageof
pesticides caneffectively control the number ofpestsandavoideconomiclossesunder
differenteconomicthresholdranges.
Keywords
Filippov,GlobalStability,SIModel,PestControl
Copyright
c
2023byauthor(s)andHansPublishersInc.
This work is licensed undertheCreative Commons Attribution InternationalLicense(CCBY4.0).
http://creativecommons.org/licenses/by/4.0/
1.
Ú
ó
2019
c
§
é
ÜI
²
L
Ú
¬
¯
Ö
Ü
u
©
L
«-
.
<
•
3
2030
c
ý
O
O
•
85
·
†
m
,
3
2050
c
ò
ˆ
97
·
[1].
•
æ
F
Ã
O
•
<
•
I
¦
,
÷
)
¡
ã
Œ
]
Ô
.
³
Á
Š
•
à
Š
Ô
U
'
,
‰
à
Š
Ô
)
‘
5
î
-
K
•
,
N
o
é
³
Á
?
1
£
n
´
<
‚
˜
†
'
5
9
:
{
K
.
z
Æ
£
n
Ú
)
Ô
£
n
´
·
‚
~
^
•{
,
ª
„
/
¦
^
à
Á
J
é
<
a
è
x
Ú
‚
¸
Ø
|
.
)
Ô
“
£
•
ª
Ï
~
´
Ý
˜
U
'
,
D
Â
;
¾
.
~
X
,
©
z
[2]
¥
J
Ñ
˜
«
|
^
M
)
·
•
à
Š
Ô
³
Á
D
4
—
·
¾
Ó
5
o
Š
Ô
•{
.
)
Ô
“
£
w
q
´
é
‚
¸
v
k
À
/
k
•
ª
,
Ý
˜
U
'
Œ
U
¬
Ú
5
Ù
¦
Á
³
,
…
¢
¿
‘
¾
³
Á
¤
p
,
¤
±•
•
3
é
Œ
6
à
.
•
)û
ü
˜
›
›
„
–
‘
5
6
à
,
é
³
Á
?
1
£
n
ž
ò
ù
ü
«
•
ª
k
Å
(
Ü
,
=
n
ܳ
Á
£
n
£
IPM
¤
[3].
³
Á
ê
þ
‡
L
²
L
K
Š
£
ET
¤
ž
,
æ
„
–
§
¦
³
Á
ê
þ
3
²
L
ˆ
³
Y
²
(EIL)
±
e
,
ù
«
•
ª
Ø
=
Œ
±
¼
•
Z
²
L
Ã
…
U
~
Ï
›
›
ü
Ñ
é
‚
¸
‘
5
K
¡
K
•
.
é
DOI:10.12677/aam.2023.1231181165
A^
ê
Æ
?
Ð
±
§
ö
ë
u
IPM
ü
Ñ
,
N
õ
Æ
ö
ï
á
ê
Æ
.
é
³
Á
£
n
?
1ï
Ä
,
X
Ø
ë
Y
›
›
³
Á
£
n
[4–6]
!
ä
k
ó
À
A
)
Ô
ê
Æ
.
.
©
Ù
¥
3
©
z
[7]
Ä
:
þ
,
b
;
¾
®
3
³
Á
¥
D
Â
,
ò
³
Á
©
•
´
a
³
Á
(S)
Ú
a
/
³
Á
(I).
a
/
³
Á
Ø
¬
é
à
Š
Ô
E
¤
K
•
,
¤
±
·
‚
ò
´
a
³
Á
Š
•
›
›•
I
,
˜
´
a
³
Á
ê
þ
ˆ
ET,
æ
IPM
„
–
.
,
,
©
z
[8]
¥
J
Ñ
a
/
ö
†
´
a
ö
D
Â
ê
þ
Ø
Œ
U
˜
†
†
I
¤
‚
5
O
•
,
du
a
/
³
Á
ê
þ
L
õ
;
¾
D
Â
g
ê
ò
ˆ
Ú
.
Ï
d
,
©
ò
˜
‡
Ú
u
¾
Ç
βI
1+
αI
•
Ä
Filippov
¾
Á
³
£
n
.
¥
,
é
Ù
?
1
Ä
å
Æ
©
Û
,
&?
¦
´
a
³
Á
ê
þ
$
u
ET
„
–
.
2.
.
0
9
ý
•
£
2.1.
³
Á
£
n
SI
.
©
ï
á
ä
k
Ú
u
¾
Ç
³
Á
“
£
.
(
dS
dt
=
rS
−
βSI
1+
αI
−
dS
−
ηq
1
S,
dI
dt
=
βSI
1+
αI
−
(
d
+
ε
)
I
+
η
(
p
−
q
2
)
I,
(2.1)
Ù
¥
,
S
(
t
)
Ú
I
(
t
)
©
OL
«
´
a
³
Á
Ú
/
¾
³
Á
3
t
ž
•
«
+
ê
þ
¶
r
L
«
´
a
³
Á
Ñ
)
Ç
;
β
L
«
D
/
Ç
,
d
Ú
ε
L
«
³
Á
g
,
k
Ç
Ú
Ï
¾
k
Ç
;
α>
0
•
Ú
ë
ê
,
q
1
Ú
q
2
©
OL
«
du
h
à
Á
J
Š
^
¦
´
a
³
Á
†
/
¾
³
Á
«
+
ê
þ
~
'
Ç
;
p
•
/
¾
³
Á
º
˜
„
Ç
.
η
=
(
0
,S<ET,
1
,S>ET,
•
›
›
¼
ê
,
ET
•
›
›
K
Š
.
›
›
¼
ê
η
L
«
´
a
³
Á
ê
þ
Œ
u
ET,
hà
Á
J
,
´
a
³
Á
ê
þ
$
u
ET
ž
,
Øæ
„
–
.
-
q
=
p
−
q
2
,
Ó
ž
b
r>d
+
q
1
.
-
H
(
Z
) =
S
(
t
)
−
ET
,
Z
= (
S,I
)
T
.
…
F
1
(
Z
) = (
f
11
,f
12
)
T
=
r
S
−
βSI
1+
αI
−
dS,
βSI
1+
αI
−
(
d
+
ε
)
I
T
F
2
(
Z
) = (
f
21
,f
22
)
T
=
r
S
−
βS
(
t
)
I
1+
αI
−
dS
−
q
1
S,
βSI
1+
αI
−
(
d
+
ε
)
I
−
qI
T
X
Ú
(2.1))
Œ
¤
X
e
Filippov
X
Ú
˙
Z
=
(
F
1
(
Z
)
,Z
∈
G
1
F
2
(
Z
)
,Z
∈
G
2
(2.2)
Ù
¥
G
1
=
Z
∈
R
2
+
:
H
(
Z
)
<
0
,
G
2
=
x
∈
R
2
+
:
H
(
Z
)
>
0
"
Ó
ž
P
Σ =
Z
∈
R
2
+
:
H
(
Z
) = 0
•
X
Ú
(2.1))
ƒ
†
‚
.
du
•
þ
|
Ø
ë
Y5
§
©
ò
?
Ø
X
Ú
(1
.
1)Filippov
¿Â
e
)
§
Ù
½
Â
X
e
µ
DOI:10.12677/aam.2023.1231181166
A^
ê
Æ
?
Ð
±
§
ö
ë
½
Â
2.1.
e
•
þ
¼
ê
(S(t),I(t))
3
[0
,T
)
?
¿
k
.
4
f
«
m
(
t
1
,t
2
)
þ
ý
é
ë
Y
(0
<T
≤
+
∞
)
,
÷
v
Ð
©
^
‡
S
(0)=
S
0
Ú
I
(0)=
I
0
,
…
•
3
Œ
ÿ
¼
ê
λ
=
λ
(
t
):[0
,T
)
→
[0
,
1]
¦
é
A
¤
k
t
∈
[0
,T
)
k
dS
dt
=
rS
−
βSI
1+
αI
−
dS
−
γq
1
S,
dI
dt
=
βSI
1+
αI
−
(
d
+
ε
)
I
+
γqI,
(2.3)
@
o
¡
•
þ
¼
ê
(S(t),I(t))
´
X
Ú
((2.1))
L
Ð
©
Š
(
S
0
,I
0
)
)
.
½
Â
2.2.
Filippov
X
Ú
(2.1)
²
ï
:
[9]
1)
e
F
1
(
Z
∗
) = 0
,H
(
Z
∗
)
<
0
½
F
2
(
Z
∗
) = 0
,H
(
Z
∗
)
>
0
¤
á
,
K
Z
∗
•
¢
²
ï
:
;
2)
e
F
1
(
Z
∗
) = 0
,H
(
Z
∗
)
>
0
½
F
2
(
Z
∗
) = 0
,H
(
Z
∗
)
<
0
¤
á
,
K
Z
∗
•
J
²
ï
:
;
3)
e
λF
1
(
Z
∗
)+(1
−
λ
)
F
2
(
Z
∗
) = 0
,H
(
Z
∗
) = 0
,
K
¡
Z
∗
•–
²
ï
:
,
Ù
¥
λ
(
Z
) =
h
H
Z
,F
2
i
h
H
Z
,F
2
−
F
1
i
.
2.2.
f
X
Ú
Ä
å
Æ
©
Û
3ù
˜
Ü
©
,
Ì
‡
©
Û
ü
‡
f
X
Ú
Ä
å
Æ1
•
.
é
u
f
X
Ú
S
1
,
Ù
Ä
2
)ê
•
R
1
=
β
α
(
r
−
d
)
.
f
X
Ú
S
1
•
3
˜
‡
"
²
ï
:
E
0
= (0
,
0),
d
Jacabian
1
ª
Œ
E
0
•
Q
:
.
R
1
>
1
ž
,
•
3
˜
‡
/
•
¾
²
ï
:
E
1
=(
S
1
,I
1
)=
d
+
ε
β
−
α
(
r
−
d
)
,
r
−
d
β
−
α
(
r
−
d
)
.
ƒ
A
/
,
é
u
f
X
Ú
S
2
,
Ù
Ä
2
)ê
•
R
2
=
β
α
(
r
−
d
−
q
1
)
,
•
3
˜
‡
Ã
¾
²
ï
:
E
0
=(0
,
0),
E
0
•
Q
:
.
R
2
>
1
ž
,
•
3
/
•
¾
ï
:
E
2
= (
S
2
,I
2
) = (
d
+
ε
−
q
β
−
α
(
r
−
d
−
q
1
)
,
r
−
d
−
q
1
β
−
α
(
r
−
d
−
q
1
)
).
·
K
2.3.
X
J
R
1
>
1
,
f
X
Ú
S
1
3
G
1
«
•
•
3
•
˜
ì
C
-
½/
•
¾
²
ï
:
E
1
;
X
J
R
2
>
1
,
f
X
Ú
S
2
3
G
2
«
•
•
3
•
˜
ì
C
-
½/
•
¾
²
ï
:
E
2
.
y
²
.
ò
f
X
Ú
S
1
U
¤
dS
dt
=
−
β
(
I
−
I
1
)
S
(1+
αI
)(1+
αI
1
)
dI
dt
=
β
(
S
−
S
1
)
I
+
αβII
1
(
S
−
S
1
)
−
αβIS
1
(
I
−
I
1
)
(1+
αI
)(1+
αI
1
)
•
Ä
o
ä
Ê
ì
Å
¼
ê
V
1
= (1+
αI
1
)
S
−
S
1
−
S
1
ln
S
S
1
+
I
−
I
1
−
I
1
ln
I
I
1
.
dV
1
dt
=
−
αβ
(
I
−
I
1
)
2
1
(1+
αI
1
)(1+
αI
)
≤
0
.
Š
â
Lasalla
ØC
n
,
Œ
E
1
3
G
1
«
•
Û
ì
C
-
½
.
a
q
/
,
•
Ä
o
ä
Ê
ì
Å
¼
ê
V
2
= (1+
αI
2
)
S
−
S
2
−
S
2
ln
S
S
2
+
I
−
I
2
−
I
2
ln
I
I
2
d
dV
2
dt
=
−
αβ
(
I
−
I
2
)
2
1
(1+
αI
2
)(1+
αI
)
≤
0
,
Œ
E
2
3
G
2
«
•
Û
ì
C
-
½
.
DOI:10.12677/aam.2023.1231181167
A^
ê
Æ
?
Ð
±
§
ö
ë
3.
w
Ä
å
Æ
©
Û
Š
â
w
•
½
Â
,
·
‚
Œ
±
Σ
s
=
{
x
∈
Σ
|h
H
z
,F
1
(
x
)
i
>
0
,
h
H
z
,F
1
(
x
)
i
<
0
}
=
h
H
z
,F
1
(
x
)
i
>
0
⇒
I<I
1
h
H
z
,F
2
(
x
)
i
<
0
⇒
I>I
2
…
I
2
<I
1
,
Œ
Σ
s
=
{
x
∈
Σ
|
I
2
<I<I
1
,S
=
ET
}
d
Filippov
à
•{
Œ
X
Ú
(2.1)
÷
Σ
s
w
•
§
•
˙
I
=
βET
1+
αI
I
−
qβ
q
1
(1+
αI
)
I
2
−
q
1
(
d
+
ε
)
−
q
(
r
−
d
)
q
1
I
=
g
(
I
)
.
(3.1)
-
ξ
=
q
1
(
d
+
ε
)+
q
2
(
r
−
d
).
˙
I
= 0,
L
«
g
(
I
) = 0
§
§
ƒ
u
ϕ
(
I
) =
−
(
qβ
+
αξ
)
I
2
+(
q
1
βET
−
ξ
)
I
=0(3.2)
Ï
d
,
ª
(3.2)
k
ü
‡Š
I
(1)
= 0
.I
(2)
=
ξ
−
q
1
βET
q
2
β
−
αξ
@
o
X
Ú
Œ
U
•
3
˜
‡
–
²
ï
:
Ep
= [
ET.I
(2)
].
e
¡
·
‚
I
(2)
∈
[
I
2
,I
1
]
¿
‡
^
‡
:
ϕ
(
I
1
) =
βq
1
(
r
−
d
)[
ET
(
β
−
α
(
r
−
d
)
−
ε
−
d
)]
[
β
−
α
(
r
−
d
)]
2
=
βq
1
I
1
(
ET
−
S
1
),
ϕ
(
I
2
) =
βq
1
(
r
−
d
−
q
1
)[
ET
(
β
−
α
(
r
−
d
−
q
1
)
−
ε
−
d
+
q
)]
[
β
−
α
(
r
−
d
−
q
1
)]
2
=
βq
1
I
2
(
ET
−
S
2
)
.
X
J
S
2
<ET<S
1
ž
,
Œ
ϕ
(
I
1
)
<
0,
ϕ
(
I
2
)
>
0,
d
"
:
•
3
½
n
Œ
•
I
(2)
∈
[
I
2
,I
1
],
–
²
ï
:
E
P
•
3
.
,
,
·
‚
Œ
±
˙
g
I
(2)
=
−
(
βETq
1
−
ξ
)(
βq
+
αξ
)
βq
1
(
q
+
αETq
1
)
<
0
.
4.
Û
Ä
å
Æ
©
Û
•
y
X
Ú
¥
•
3
²
ï
:
•
3
5
,
·
‚
b
R
1
>
1.
!
ò
©
Û
Filippov
Û
Ä
å
Æ
,
Ä
k
ü
Ø
¤
k
Œ
U
4
•
‚
,
,
2
ò
²
ï
:
¢
J
Ú
Û
Ü
-
½
5
ƒ
(
Ü
,
Œ
±
3
n
Ø
Ú
ê
Š
[
þ
X
Ú
Û
Ä
å
Æ
.
du
ET
Š
Ø
Ó
,
¤
k
Œ
U
²
ï
:
•
3
5
Ú
-
½
5
•
Ø
Ó
,
¤
±
©
e
n
«
œ
¹
?
1
?
Ø
.
3
X
Ú
Û
-
½
5
c
,
·
‚
k
ü
Ø
X
Ú
•
3
4
•
‚
.
Ú
n
4.1.
X
Ú
(2.1)
Ø
•
3
•
¹
Ü
©
w
ã
Σ
s
4
•
‚
.
y
²
.
S
2
<ET<S
1
ž
,
–
²
ï
:
E
p
•
3
…
Û
Ü
ì
C
-
½
,
ù
L
²
l
G
i
Ñ
u
;
‚
ˆ
w
ã
I
1
I
2
ª
•
–
²
ï
:
E
P
.
d
ž
,
X
Ú
S
Ø
•
3
•
¹
Ü
©
w
ã
4
•
‚
.
DOI:10.12677/aam.2023.1231181168
A^
ê
Æ
?
Ð
±
§
ö
ë
ET>S
1
ž
§
•
3
¢
²
ï
:
E
1
.
b
•
3
•
¹
Ü
©
w
ã
Σ
s
4
•
‚
Γ
,
;
‚
Γ
²
L
ƒ
:
(
ET,I
1
)
¿
…
2
g
ˆ
Σ
s
,
X
ã
1(a)
¤
«
.
ù
†
½
n
3.1
¥
E
1
Û
ì
C
-
½
ƒ
g
ñ
,
¤
±
l
ƒ
:
(
ET,I
1
)
Ñ
u
;
‚
Ø
¬
ˆ
Σ
s
,
=
Ø
•
3
•
¹
Ü
©
w
ã
4
•
‚
.
·
‚
•
Œ
±
^
a
q
•{
y
²
e
ET<S
2
ž
Ø
•
3
4
•
‚
.
Figure1.
Schematicdiagramofexcludinglimitcycle
ã
1.
ü
Ø
‚
«
¿
ã
Ú
n
4.2.
X
Ú
(2.1)
Ø
•
3
‚
7
w
ã
Σ
s
4
•
‚
.
y
²
.
b
•
3
˜
‡
‚
7
w
ã
I
1
I
2
4
•
‚
L
,
X
ã
1(b)
¤
«
.
-
L
=
L
1
+
L
2
,
…
L
i
=
L
T
G
i
.
4
•
‚
Ú
†
‚
S
=
ET
−
,
S
=
ET
+
3
:
P
1
,
Q
1
†
P
2
,
Q
2
?
ƒ
.
-
∂D
1
•
‚
ã
L
1
†
B
1
A
1
¤
Œ
¤
«
•
D
1
>
.
,
-
∂D
2
•
‚
ã
L
2
†
A
2
B
2
¤
Œ
¤
«
•
D
2
>
.
.
Ó
ž
§
A,B,
A
1
,
A
2
,
B
1
,
B
2
p‹
I
©
O
•
a,b,
a
−
δ
1
(
)
,
a
−
δ
2
(
)
,
b
+
δ
3
(
)
,
b
+
δ
4
(
)
§
¿
…
÷
v
lim
→
0
δ
i
(
) = 0
,
(
i
= 1
,
2
,
3
.
4)
.
Dulac
¼
ê
B
(
SI
) =
1
SI
,
@
o
ZZ
D
1
∂
(
Bf
11
)
∂S
+
∂
(
Bf
12
)
∂I
dSdI
+
ZZ
D
2
∂
(
Bf
21
)
∂S
+
∂
(
Bf
22
)
∂I
dSdI
=
−
2
α
(1+
αI
)
2
<
0(4.1)
3
D
1
¥
A^
‚
ú
ª
k
ZZ
D
1
∂
(
Bf
11
)
∂S
+
∂
(
Bf
12
)
∂I
dSdI
=
I
∂D
1
+
−−−→
B
1
A
1
B
(
f
11
dI
−
f
12
ds
)
=
I
∂D
1
B
(
f
11
dI
−
f
12
dS
)+
Z
−−−→
B
1
A
1
Bf
11
dI
=
Z
−−−→
B
1
A
1
Bf
11
dI
=
Z
a
−
δ
1
(
)
b
+
δ
3
(
)
r
I
−
β
1+
αI
−
d
I
dI
DOI:10.12677/aam.2023.1231181169
A^
ê
Æ
?
Ð
±
§
ö
ë
Ó
/
,
3
D
2
¥
A^
‚
ú
ª
k
ZZ
D
2
∂
(
Bf
21
)
∂S
+
∂
(
Bf
22
)
αI
dSdI
=
Z
−−−→
A
2
B
2
Bf
21
dI
=
Z
b
+
δ
4
(
)
a
−
δ
2
(
)
r
I
−
β
1+
αI
−
d
I
−
q
1
I
dI
@
o
Œ
lim
→
0
ZZ
D
1
∂
(
Bf
11
)
∂S
+
∂
(
Bf
21
)
∂I
+
ZZ
D
2
∂
(
Bf
21
)
∂S
+
∂
(
Bf
22
)
αI
dSdI
=lim
→
0
Z
a
−
δ
1
(
)
b
+
δ
3
(
)
r
I
−
β
1+
αI
−
d
I
dI
+
Z
b
+
δ
4
(
)
a
−
δ
2
(
)
r
I
−
β
1+
αI
−
d
I
−
q
I
dI
!
.
=
Z
a
b
q
I
dI>
0
.
ù
†
(4.1)
Ñ
y
g
ñ
.
Ï
d
,
Ø
•
3
‚
7
w
ã
I
1
I
2
4
•
‚
.
œ
/
1.1
S
2
<S
1
<ET
ž
,
/
•
¾
²
ï
:
E
1
•
¢
²
ï
:
,
E
2
•
J
²
ï
:
.
3
X
Ú
Û
-
½
5
c
,
·
‚
k
ü
Ø
X
Ú
•
3
4
•
‚
.
½
n
4.3.
X
J
S
2
<S
1
<ET
,
¢
²
ï
:
E
1
Û
ì
C
-
½
.
y
²
.
S
2
<S
1
<ET
ž
,
E
1
•
¢
²
ï
:
,
E
2
•
J
²
ï
:
.
qd
ª
(3.1)
5
Ÿ
Œ
•
g
(
I
1
)
>
0
,g
(
I
2
)
>
0
,
¤
±
[
I
2
,I
1
]
þ
,
g
(
I
)
>
0
,
ù
`
²
d
ž
Ø
•
3
–
²
ï
:
,
…
w
ã
þ
;
‚
•
•
l
e
þ
.
d
Ú
n
(4.1)
†
(4.2)
Œ
•
X
Ú
(2.1)
Ø
•
3
4
•
‚
.
Ï
d
,
3
G
2
¥
;
‚
Ã
Ø
´
Ä
ƒ
¥
w
ã
•
ª
ª
u
G
1
,
G
1
¥
;
‚
ò
ª
•
u
E
1
,
d
·
K
(2.3)
Œ
•
E
1
Û
ì
C
-
½
.
¤
±
Ã
Ø
Ð
©
˜
X
Û
,
;
‚
•
ª
Ñ
¬
-
½
E
1
,
¤
±
E
1
Û
ì
C
-
½
X
ã
2(a))
¤
«
.
œ
/
1.2
S
2
<ET<S
1
ž
,
E
1
Ú
E
2
Ñ
•
J
²
ï
:
.
½
n
4.4.
X
J
S
2
<ET<S
1
,
–
²
ï
:
E
p
Û
ì
C
-
½
.
y
²
.
S
2
<ET<S
1
ž
,
E
1
Ú
E
2
Ñ
•
J
²
ï
:
,
d
ª
(3.1)
5
Ÿ
Œ
•
g
(
I
1
)
<
0
,g
(
I
2
)
>
0
,
¤
±
3
[
I
2
,I
1
]
þ
•
3
•
˜
"
:
,
•
Ò
´
`
–
²
ï
:
E
p
•
3
…
Û
Ü
ì
C
-
½
.
3ù
«
œ
¹
e
,
Œ
•
E
1
u
G
2
«
•
,
E
2
u
G
1
«
•
,
¤
±
;
‚
Ñ
ª
•ƒ
‡
«
•
±
ˆ
g
²
ï
,
q
Ï
•
E
p
Û
Ü
ì
C
-
½
,
…
d
Ú
n
(4.1)
†
(4.2)
Œ
•
Ø
•
3
4
•
‚
.
¤
±
¤
k
;
‚
•
ª
Ñ
¬Â
¥
w
ã
¿
Â
ñ
–
²
ï
:
§
Ï
d
Œ
•
–
²
ï
:
E
p
Û
ì
C
-
½
,
X
ã
2(b))
¤
«
.
œ
/
1.3
ET<S
2
<S
1
ž
,
•
3
¢
²
ï
:
E
2
,
J
²
ï
:
E
1
.
Œ
±
e
(
Ø
,
Ù
y
²
L
§
a
q
u
½
n
(4.5),
;
‚
ã
”
X
ã
2(c))
¤
«
.
½
n
4.5.
X
J
ET<S
2
<S
1
,
¢
²
ï
:
E
2
Û
ì
C
-
½
.
5.
)
Ô
Æ
¿Â
©
±
Filippov
Ä
å
Æ
X
Ú
•
Ä
:
,
ï
á
ä
k
Ú
u
)
Ç
³
Á
£
n
SI
.
,
é
Ù
?
1
X
Ú
©
Û
,
¿
•
Ñ
z
Æ
“
£
Ú
)
Ô
“
£
é
³
Á
£
n
Š
^
.
ï
Ä
Ñ
,
R
2
<
1
ž
,
•
k
Ã
¾
²
ï
:
E
0
•
DOI:10.12677/aam.2023.1231181170
A^
ê
Æ
?
Ð
±
§
ö
ë
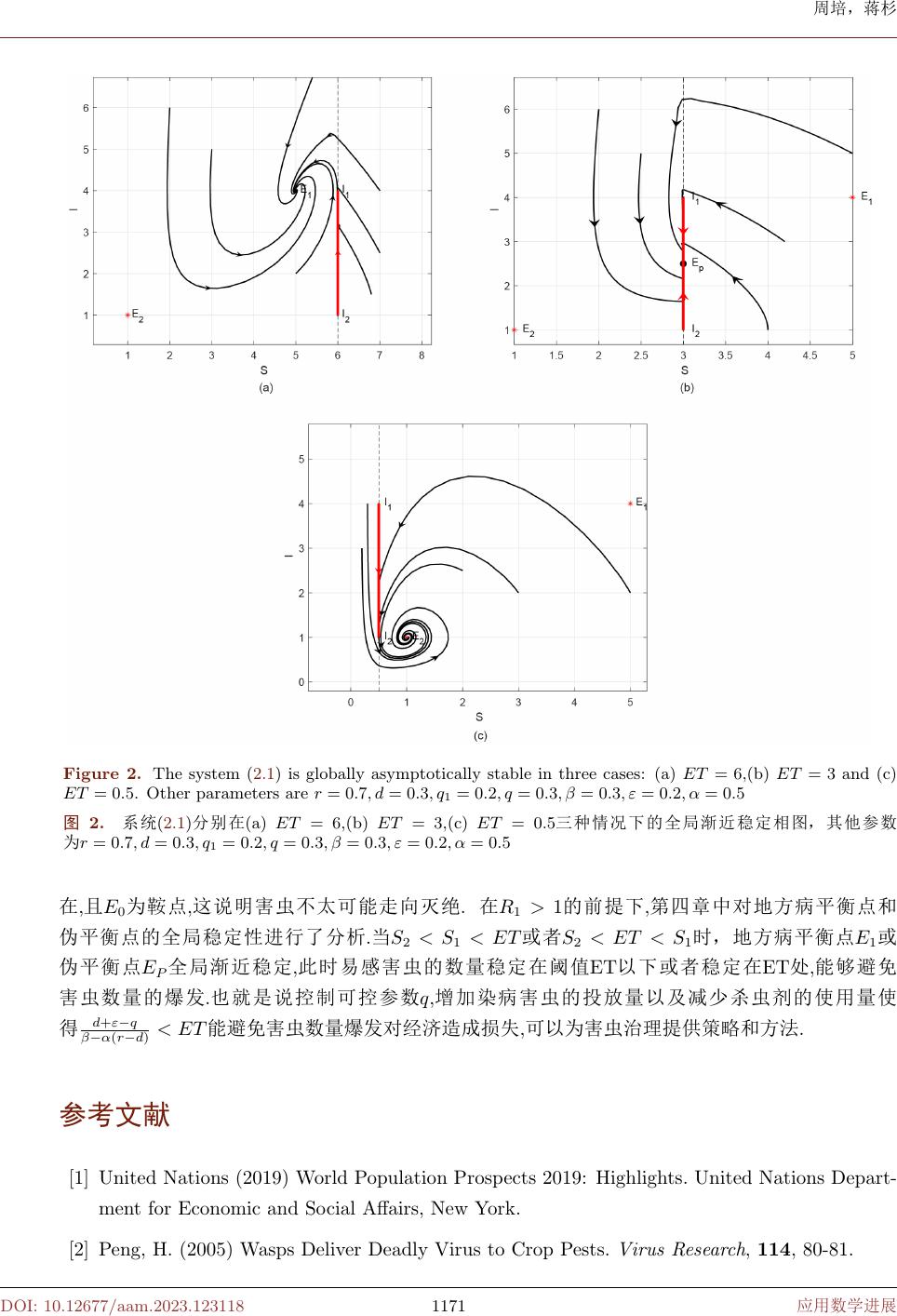
Figure2.
Thesystem(2.1)isgloballyasymptoticallystableinthreecases:(a)
ET
=6,(b)
ET
=3and(c)
ET
=0
.
5.Otherparametersare
r
=0
.
7
,d
=0
.
3
,q
1
=0
.
2
,q
=0
.
3
,β
=0
.
3
,ε
=0
.
2
,α
=0
.
5
ã
2.
X
Ú
(2.1)
©
O
3
(a)
ET
=6,(b)
ET
=3,(c)
ET
=0
.
5
n
«
œ
¹
e
Û
ì
C
-
½
ƒ
ã
§
Ù
¦
ë
ê
•
r
=0
.
7
,d
=0
.
3
,q
1
=0
.
2
,q
=0
.
3
,β
=0
.
3
,ε
=0
.
2
,α
=0
.
5
3
,
…
E
0
•
Q
:
,
ù
`
²
³
Á
Ø
Œ
U
r
•
«
ý
.
3
R
1
>
1
c
J
e
,
1
o
Ù
¥
é/
•
¾
²
ï
:
Ú
–
²
ï
:
Û
-
½
5
?
1
©
Û
.
S
2
<S
1
<ET
½
ö
S
2
<ET<S
1
ž
§
/
•
¾
²
ï
:
E
1
½
–
²
ï
:
E
P
Û
ì
C
-
½
,
d
ž
´
a
³
Á
ê
þ
-
½
3
K
Š
ET
±
e
½
ö
-
½
3
ET
?
,
U
;
•
³
Á
ê
þ
u
.
•
Ò
´
`
›
›
Œ›
ë
ê
q
,
O
\
/
¾
³
Á
Ý
˜
þ
±
9~
à
Á
J
¦
^
þ
¦
d
+
ε
−
q
β
−
α
(
r
−
d
)
<ET
U
;
•
³
Á
ê
þ
u
é
²
L
E
¤
›
”
,
Œ
±
•
³
Á
£
n
J
ø
ü
Ñ
Ú
•{
.
ë
•
©
z
[1]UnitedNations(2019)WorldPopulationProspects2019:Highlights.UnitedNationsDepart-
mentforEconomicandSocialAffairs,NewYork.
[2]Peng,H.(2005)WaspsDeliverDeadlyVirustoCropPests.
VirusResearch
,
114
,80-81.
DOI:10.12677/aam.2023.1231181171
A^
ê
Æ
?
Ð
±
§
ö
ë
[3]Costa, M.I.(2010) Integrated Pest Management:Theoretical Insights from aThreshold Policy.
NeotropicalEntomology
,
39
,1-8.https://doi.org/10.1590/S1519-566X2010000100001
[4]Tang,S.,Liang,J.,Xiao,Y.,
etal.
(2012)SlidingBifurcationsofFilippovTwoStagePest
Control Models withEconomicThresholds.
SIAMJournalonAppliedMathematics
,
72
,1061-
1080.https://doi.org/10.1137/110847020
[5]Liu,L.,Xiang,C.,Tang,G.,
etal.
(2019)SlidingDynamicsofaFilippovForest-PestModel
withThresholdPolicyControl.
Complexity
,
2019
,ArticleID:2371838.
https://doi.org/10.1155/2019/2371838
[6]Qin,W.,Tan,X.,Tosato,M.,
etal.
(2019)ThresholdControlStrategyforaNon-Smooth
Filippov EcosystemwithGroup Defense.
AppliedMathematicsandComputation
,
362
,Article
ID:124532.https://doi.org/10.1016/j.amc.2019.06.046
[7]Liu,B.,Liu,W.,Tao,F.,
etal.
(2015)ADynamicalAnalysisofaPiecewiseSmoothPest
ControlSIModel.
InternationalJournalofBifurcationandChaos
,
25
,ArticleID:1550068.
https://doi.org/10.1142/S0218127415500686
[8]Capasso,V.and Serio,G. (1978)A Generalizationof theKermack-McKendrickDeterministic
EpidemicModel.
MathematicalBiosciences
,
42
,43-61.
https://doi.org/10.1016/0025-5564(78)90006-8
[9]
‘
á
÷
,
H
,
Z
Ï
.
m
à
Ø
ë
Y
‡
©•
§
n
Ø
†A^
[M].
®
:
‰
Æ
Ñ
‡
,2011.
DOI:10.12677/aam.2023.1231181172
A^
ê
Æ
?
Ð