Dynamical Systems and Control
Vol.06 No.02(2017), Article ID:20455,9
pages
10.12677/DSC.2017.62011
Modeling and Experiment of a Rotary Flexible Arm Based on Repetitive Controllers
Zihan Yang, Jun Jiang
State Key Laboratory for Strength and Vibration of Mechanical Structures, Xi’an Jiaotong University, Xi’an Shannxi

Received: Apr. 7th, 2017; accepted: Apr. 27th, 2017; published: Apr. 30th, 2017

ABSTRACT
In this paper, to study the effect of the repetitive control on the control accuracy of a rotary flexible arm, the dynamic numerical model of a rotary flexible arm is established, and especially the effect of the gear drive to this system is considered. From simulation results of dynamic model, we find that the nonlinear of the gear drive causes the vibration of the rotary flexible arm when tracking periodic continuous signal is found. Based on the conclusion, a PID controller based on repetitive control compensation algorithm is applied to implement the Quanser’s Rotary Flexible Link to follow a given motion signal. The simulation and experimental results validate the repetitive control will enhance the tracking accuracy of the rotary flexible link.
Keywords:Rotary Flexible Arm, Gear Drive, PID, Repetitive Control
基于重复控制的旋转运动柔性臂建模 和实验研究
杨子涵,江俊
西安交通大学机械结构强度与振动国家重点实验室,陕西 西安
收稿日期:2017年4月7日;录用日期:2017年4月27日;发布日期:2017年4月30日

摘 要
为了研究重复控制对于旋转运动柔性臂控制精度的影响,本文建立了一个旋转运动柔性臂的动力学数值模型,并且特别考虑了齿轮传动机构对系统的影响。通过对动力学模型的仿真结果发现:齿轮传动机构的非线性是旋转运动柔性臂跟踪连续的周期信号时产生振动的原因。基于这一结论,一个基于重复控制补偿算法的PID控制器被用在Quanser公司的Rotary Flexible Link中去跟随给定运动状态。仿真结果和实验结果验证了重复控制可以提高旋转运动柔性臂的跟踪精度。
关键词 :旋转运动柔性臂,齿轮传动,PID,重复控制

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
旋转运动柔性臂结构一直是航天航空工业和制造业领域中较为关注的研究对象,从航天器柔性附件,太阳能帆板,高速旋转机器人,风电发电叶片等大型设备到压电俘能器,智能鳍片等小型结构都是以旋转运动柔性臂为基础模型展开研究。由于这类挠性旋转结构具有非线性,大变形,强耦合的特征,针对这类系统的建模、动力学与振动控制方法的研究是当前热切关注的课题。为了确保在结构柔性化的趋势下,实现高精度的定位或者跟随性能,减少结构振动对位置定位精度和跟随性能的影响,研究人员进行了大量的研究。
对于旋转运动柔性臂结构的建模理论和控制理论,国内外研究人员进行了大量的研究并取得了长足的进展。文献 [1] [2] 介绍了哈密顿原理和假设模态法等建模方法。文献 [3] 给出了旋转柔性梁系统的振动频响特性分析。文献 [4] [5] [6] 研究了柔性臂负载变化时和考虑未建模动态柔性操纵器末端轨迹跟踪的鲁棒控制器问题。文献 [7] [8] [9] 研究了柔性操纵器末端轨迹的PID控制及其优化问题。文献 [10] [11] 研究了运动柔性臂轨迹跟踪的神经模糊控制。文献 [12] 研究了多连杆柔性操纵器的反馈线性化控制
本文以Quanser公司的SRV02旋转平台和Rotary Flexible Link旋转运动柔性臂为研究对象,基于一次理论模型采用哈密顿原理和假设模态法推导了该系统的数学模型。在模型建立过程中发现,该方法推导下的模型并没有考虑传动机构的非线性成分,因此当系统进行位置跟踪时,只有在系统启动和停止阶段会产生柔性臂的振动。本文借助SIMULINK中的齿轮模块,研究考虑齿轮传动的旋转运动柔性臂动力学模型并进行仿真,发现由于传动机构的非线性,旋转运动柔性臂不仅在启停阶段,而且在跟踪周期连续信号过程中也会产生振动。以考虑齿轮传动机构的模型为基础的采用重复控制(Repetitive Control, RC)补偿的PID算法实现旋转运动柔性臂位置跟踪。在Rotary Flexible Link运动跟踪实验平台上应用该算法跟踪给定连续周期信号,实验结果验证了采用重复控制补偿的PID算法可以改善旋转运动柔性臂的跟踪精度。
2. 动力学建模与控制
Quanser公司的旋转运动柔性臂实验台由两个模块(SRV02和Rotary Flexible Link)组合而成,主要结构分为三个部分,见图1。底部为旋转运动柔性臂的基座以及基座中空内包括的驱动部分,中部为减速传动机构,顶部分为柔性臂和固定柔性臂的基座部分,柔性臂固定在基座上。在该系统中,柔性梁与中心刚体的长度比值达到三十倍以上,柔性梁的展弦比达到二十倍以上,所以柔性臂易受到外部激励产生振动。
2.1. 模型及动力学方程
将该系统简化为中心刚体—悬臂梁模型,建立混合坐标系,见图2。O-X0Y0为惯性坐标系,O-

Figure 1. The models of SRV02 and the Rotary Flexible Link
图1. SRV02模块和Rotary Flexible Link模块

Figure 2. Hybrid coordinate system
图2. 混合坐标系
为固结在中心刚体上的浮动坐标系。浮动坐标系与中心刚体保持同步运动,其相对速度为零。在浮动坐标系下,将柔性臂的变形分解为横向变形和纵向变形。一次近似理论模型认为柔性臂的纵向变形和横向变形存在耦合量,柔性臂的横向变形会引起纵向变形缩短,将柔性臂的横向变形的二阶耦合量计入到纵向变形中,柔性臂的变形可以描述为 [2]
 (1)
(1)
将上述变形代入哈密顿原理的表达式中,不考虑纵向变形,以 表征旋转运动柔性臂大范围运动,
表征旋转运动柔性臂大范围运动, 表征柔性梁振动的各阶模态向量,得到如下方程
表征柔性梁振动的各阶模态向量,得到如下方程
 (2)
(2)
上式中的各项系数矩阵在式(3)中列出,其中的常值矩阵在式(4)中列出。其中 为的柔性臂的密度,
为的柔性臂的密度, 是柔性臂的横截面积,
是柔性臂的横截面积, 为柔性臂的弹性模量,
为柔性臂的弹性模量, 为柔性臂的极惯性矩。
为柔性臂的极惯性矩。
 (3)
(3)
 (4)
(4)
式2中的 表示电机的输出转矩,其表达式如式(5)中所示,
表示电机的输出转矩,其表达式如式(5)中所示, 表示的是电机的电枢电阻,
表示的是电机的电枢电阻, 表示的是齿轮传动机构的传动比。
表示的是齿轮传动机构的传动比。
 (5)
(5)
2.2. 位置跟踪控制
PID算法是控制理论中最普遍且容易实现的控制算法,既能够提高系统的稳态性能又能够提高系统的动态性能,其算法表达式如式所示。
 (6)
(6)
但PID算法的精度不高,鲁棒性不好,易受干扰的影响。为了提高PID算法的性能,本文采用重复控制 [13] [14] 对PID算法进行补偿,针对旋转运动柔性臂的位置跟踪问题,设定位置信号是周期连续的,采用延迟模块延迟保存上个周期的误差信号,与控制信号相加作用于旋转运动柔性臂,框图见图3。
3. 实验
本文在Quanser公司的旋转运动实验台上进行实验。该实验硬件设备包含SRV02旋转伺服平台、Rotary Flexible Link组件(见图1)。另外还包括Q8数据采集卡和接口板和供电模块,内嵌到SIMULINK元件库中的QUARC软件和编译软件Visual Studio。
SRV02旋转模块由直流电机和齿轮组成,电机输出齿轮为24齿,负载齿轮为120齿,另外直流电机附带编码器测量电机位置。Rotary Flexible Link组件上表贴一片压电复合纤维材料作为变形的传感器。所有控制算法在SIMULINK中实现,并进行编译。Q8采集卡以及接口板进行数据采集,信号输入输出和数模模数转换。供电模块自带的功率放大器对信号进行放大后驱动负载。实验流程见图4,Q8采集卡采集传感器的信号到计算机中,在SIMULIUNK环境下控制器运算后再由Q8采集卡给出控制信号经过供电模块驱动电机,形成闭环回路。
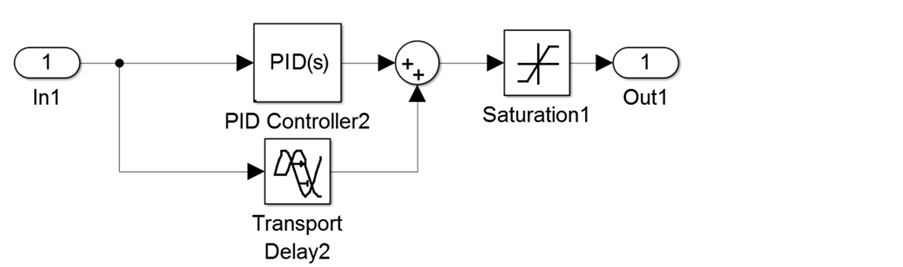
Figure 3. The block diagram of PID control with repetitive control
图3. 重复控制补偿的PID控制框图
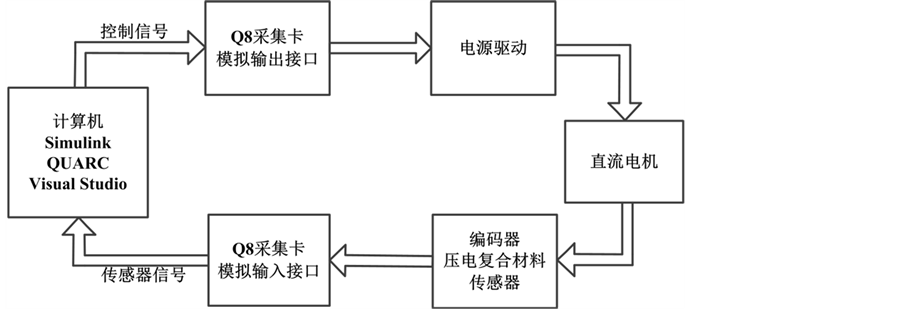
Figure 4. The experimental flow graph
图4. 实验流程图

Table 1. The sizes and material parameters of the flexible arm
表1. 柔性臂尺寸以及材料参数
Table 2. The parameters of the dc-motor
表2. 直流电机参数
4. 数值仿真与实验对比
4.1. 数值仿真
本文中基于Quanser公司开发的旋转运动控制系统中的Rotary Flexible Link模块进行仿真和实验。,柔性臂部分的几何参数、材料参数(见表1)和电机驱动的机电参数(见表2)。
由表1可以看出,该柔性臂模块的长度方向的数值远远大于厚度方向和宽度方向,所以在建模过程中可以将其考虑为欧拉-伯努利形式的薄梁。柔性臂部分采用的是高速钢材料制备而成,在建模过程中,假设其为各向同性,均匀分布的材料。
将表1和表2的数据代入第二部分的动力学模型中,在SIMULINK中进行仿真建模,以齿轮的传递效率来表征齿轮的啮合损失,比较不同效率下的旋转运动柔性臂系统跟踪0.1 Hz正弦信号的没有进行反馈控制时的开环跟踪响应。
系统跟踪0.1 Hz正弦信号的不同齿轮传动效率下跟踪响应曲线和振动响应曲线见图5。图5(a)表明没有齿轮传动时的跟踪幅值很大且不会随时间有偏移。有齿轮时,跟踪幅值相比无齿轮时变小,且随时间偏移,传动效率越小,偏移量越大。图5(b)~图5(d)说明齿轮传动效率接近于1时振动响应的形式与无齿轮传动时相似,幅值较小且随时间逐渐衰减,齿轮传动效率较低时振动重复被激发且幅值较大。
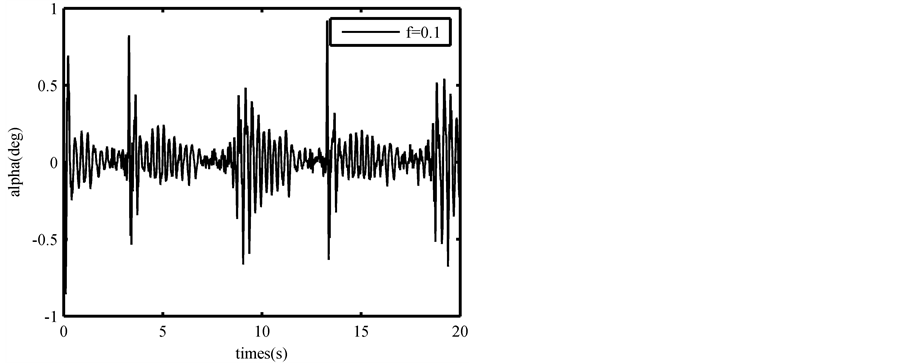
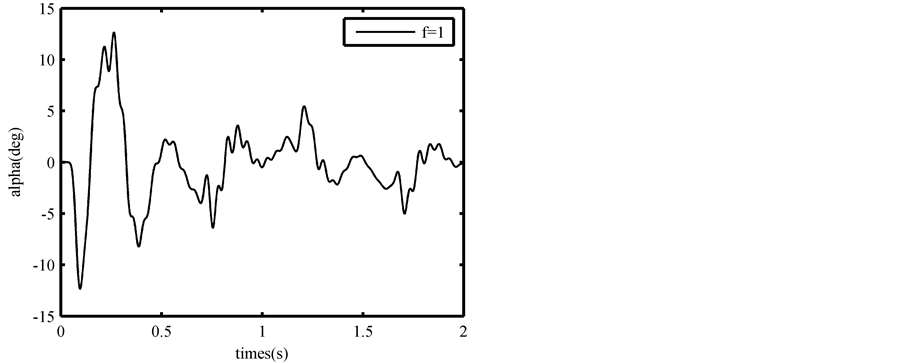
设定齿轮传动效率的系数为0.8,在重复控制补偿的PID控制器作用下,系统分别跟踪0.1 Hz (见图6)和1 Hz (见图7)正弦信号。仿真结果表明该控制器能够实现跟踪不同的位置信号。在同一个PID控制器的情况下,重复控制补偿在跟踪1 Hz时效果更加明显。
4.2. 实验结果
在SRV02伺服平台和Rotary Flexible Link实验台跟踪0.1 Hz时的开环响应见图8,系统跟踪曲线有较大的偏移量,柔性臂振动重复被激发且幅值较大。设定齿轮传动效率的系数为0.8,在重复控制补偿的

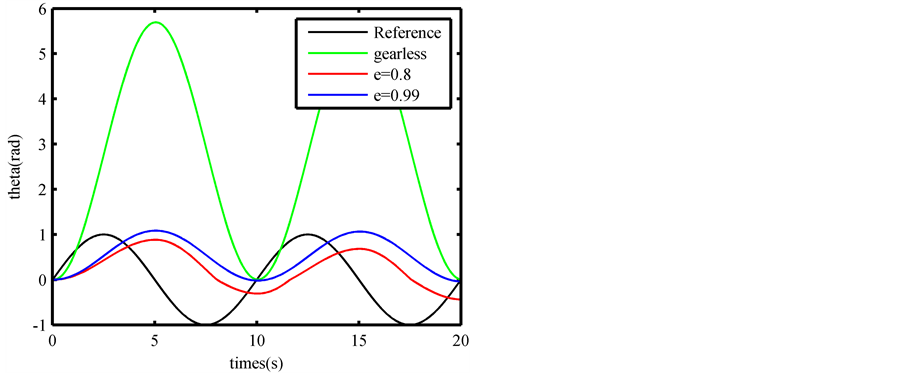 (a) 不同效率开环跟踪响应(b) 无齿轮跟踪时的振动响应
(a) 不同效率开环跟踪响应(b) 无齿轮跟踪时的振动响应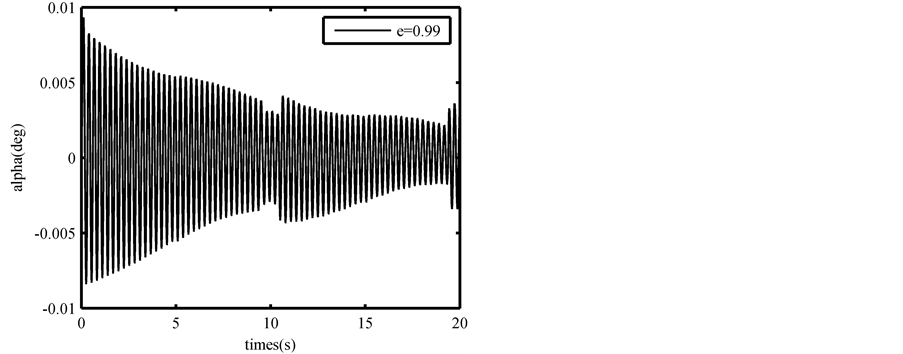
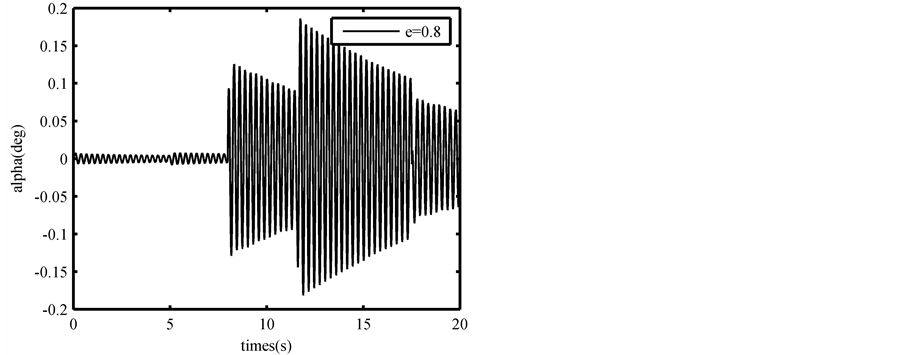 (c) 效率为0.8跟踪的振动响应(d) 效率为0.99跟踪时的振动响应
(c) 效率为0.8跟踪的振动响应(d) 效率为0.99跟踪时的振动响应
Figure 5. The open loop simulation results to track the 0.1 Hz sine waveform
图5. 跟踪0.1 Hz正弦信号的开环仿真结果
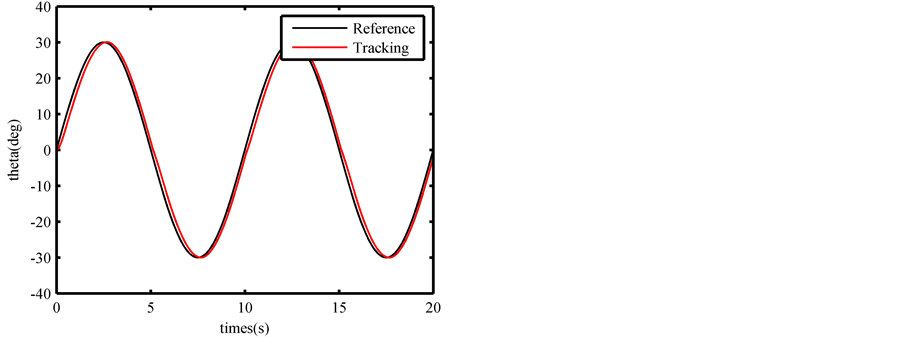
 (a) 位置跟踪(b) 柔性臂振动
(a) 位置跟踪(b) 柔性臂振动
Figure 6. The simulation results to track the 0.1 Hz sine waveform with PID controller based on RC
图6. 基于重复控制的PID控制器跟踪0.1 Hz正弦信号的仿真结果

 (a) 位置跟踪(b) 柔性臂振动
(a) 位置跟踪(b) 柔性臂振动
Figure 7. The simulation results to track the 1 Hz sine waveform with PID controller based on RC
图7. 基于重复控制的PID控制器跟踪1 Hz正弦信号的仿真结果
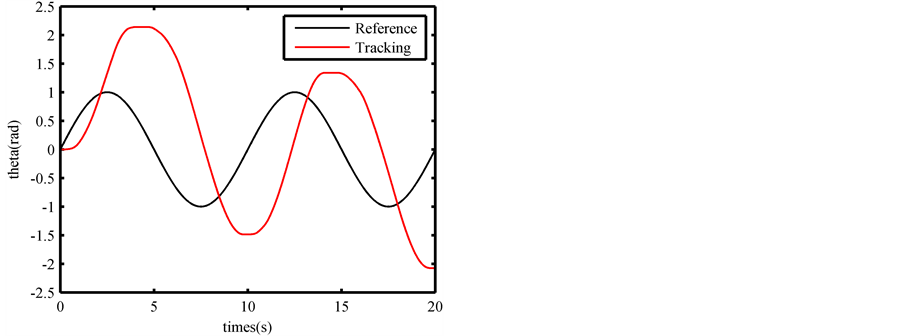
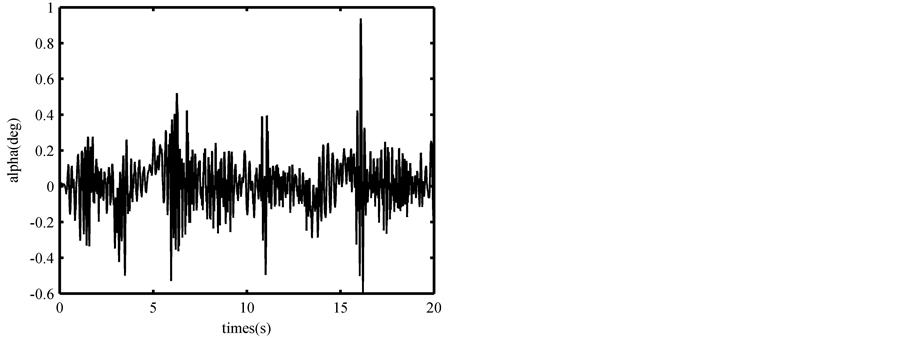 (a) 位置跟踪(b) 柔性臂振动
(a) 位置跟踪(b) 柔性臂振动
Figure 8. The open loop experimental results to track the 0.1 Hz sine waveform
图8. 跟踪0.1 Hz正弦信号的开环实验结果
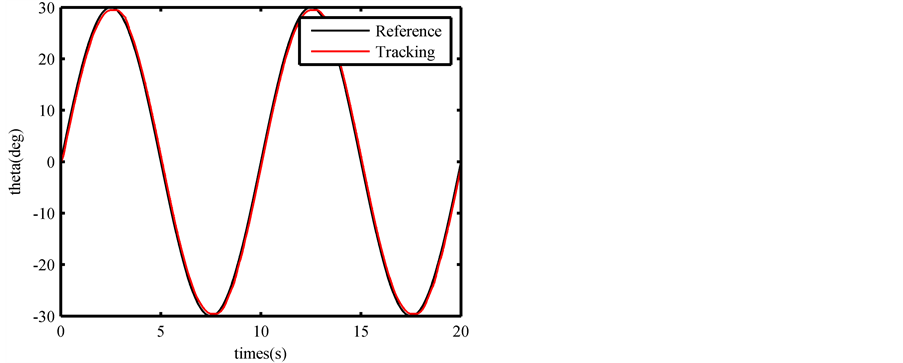
 (a) 位置跟踪(b) 柔性臂振动
(a) 位置跟踪(b) 柔性臂振动
Figure 9. The experimental results to track the 0.1 Hz sine waveform with PID controller based on RC
图9. 基于重复控制的PID控制器跟踪0.1 Hz正弦信号的实验结果
 (a) 位置跟踪(b) 柔性臂振动
(a) 位置跟踪(b) 柔性臂振动
Figure 10. The experimental results to track the 1 Hz sine waveform with PID controller based on RC
图10. 基于重复控制的PID控制器跟踪1 Hz正弦信号的实验结果
PID控制器作用下,分别跟踪0.1 Hz (见图9)和1 Hz (见图10)正弦信号。试验数据表明对于重复控制补偿的PID控制器,第二个周期重复控制加入同一组PID参数的情况下,重复控制补偿在位置信号为1 Hz时效果更加明显。
5. 结论
为了研究重复控制对于旋转运动柔性臂控制精度的影响,本文以旋转运动柔性臂为研究对象,采用哈密顿原理和假设模态法建立了动力学数值模型。在仿真模型中增加Simulink中的齿轮模块,对比模型开环响应的仿真结果和实验结果发现齿轮传递效率越低,跟踪曲线的偏移越大,损失的幅值越大,引起柔性臂振动越大,重复激发的可能性越大,说明齿轮传动机构的非线性是柔性臂系统跟踪连续的周期信号时产生振动,影响跟踪精度的原因。最后,在Quanser公司的Rotary Flexible Link运动跟踪实验平台上应用重复控制补偿的PID控制算法,实现了旋转运动柔性臂对给定运动状态的跟踪,同时验证了重复控制补偿的PID算法在PID参数一定时有改善旋转运动柔性臂的跟踪精度的作用。
基金项目
本工作得到了国家自然科学基金项目(11332008)的资助。
文章引用
杨子涵,江 俊. 基于重复控制的旋转运动柔性臂建模和实验研究
Modeling and Experiment of a Rotary Flexible Arm Based on Repetitive Controllers[J]. 动力系统与控制, 2017, 06(02): 82-90. http://dx.doi.org/10.12677/DSC.2017.62011
参考文献 (References)
- 1. 方建士, 章定国. 旋转悬臂梁的刚柔耦合动力学建模与频率分析[J]. 计算力学学报, 2012, 29(3): 333-339.
- 2. 蔡国平, 洪嘉振. 旋转运动柔性梁的假设模态方法研究[J]. 力学学报, 2005, 37(1): 48-56.
- 3. 邱志成. 旋转柔性梁系统振动频响特性分析及振动抑制[J]. 振动与冲击, 2008, 27(6): 75-80.
- 4. Feliu, V., Castillo, F.J., Ramos, F. and Somolinos, J.A. (2012) Robust Tip Trajectory Tracking of a Very Lightweight Single-Link Flexible Arm in Presence of Large Payload Changes. Mechatronics, 22, 594-613.
- 5. Morales, R., Feliu, V. and Jaramillo, V. (2012) Position Control of Very Lightweight Single-Link Flexible Arms with Large Payload Variations by Using Disturbance Observers. Robotics and Autonomous Systems, 60, 532-547.
- 6. Rairez-Neria, M., Ochoa-Otrega, G. and Lozada-Castillo, N. (2016) On the Robust Trajectory Tracking Task for Flexible-Joint Robotic Arm with Unmodeled Dynamics. IEEE Access, 4, 7816-7827.
- 7. Agee, J.T., Bingul, Z. and Kizir, S. (2014) Tip Trajectory Control of a Flexible-Link Manipulator Using an Intelligent Proportional Integral (iPI) Controller. Transactions of the Institute of Measurement and Control, 36, 673-682. https://doi.org/10.1177/0142331213518577
- 8. Tijani, I.B., Akmeliawati, R., Muthalif, A.G.A. and Legowo, A. (2011) Optimization of PID Controller for Flexible Link System Using a Pareto-Based Multi-Objective Differential (PMODE) Evolution. 4th International Conference on Mechatronics (ICOM), Kuala Lumpur, 17-19 May 2011, 1-6.
- 9. Chen, L.-X. and Sun, J.-Q. (2014) Multi-Objective Optimal Design and Experimental Validation of Tracking Control of a Rotating Flexible Beam. Journal of Sound and Vibration, 333, 4415-4426.
- 10. Nikpay, N., Aliyari Shoorehdeli, M. and Teshnehlab, M. (2011) Neural-Fuzzy Control of Quanser Flexible Link. 11th International Con-ference on Hybrid Intelligent Systems (HIS), Melacca, 5-8 December 2011, 436-441.
- 11. Kherraz, K., Hamerlain, M. and Achour, N. (2015) Robust Neuro-Fuzzy Sliding Mode Controller for a Flexible Robot Manipulator. International Journal of Robotics and Automation, 30. https://doi.org/10.2316/Journal.206.2015.1.206-3994
- 12. Nanos, K. and Papadopoulos, E.G. (2015) On the Dy-namics and Control of Flexible Joint Space Manipulators. Control Engineering Practice, 45, 230-243.
- 13. 马亚丽, 靳宝全, 程珩. 重复控制补偿的PID电液伺服位置控制[J]. 流体传动与控制, 2010(2): 31-33.
- 14. 刘柏林, 林建泉, 孙家文. 基于嵌入式重复控制的三相PWM整流器控制研究[J]. 通信电源技术, 2017(1): 7-9.