Dynamical Systems and Control
Vol.07 No.03(2018), Article ID:25788,13
pages
10.12677/DSC.2018.73022
Preview Tracking Control for a Class of Uncertain Discrete-Time System with Time-Varying Delay
Rong Fan1, Weiqun Wang1, Juan Yao2
1School of Science, Nanjing University of Science and Technology, Nanjing Jiangsu
2School of Automation, Nanjing University of Science and Technology, Nanjing Jiangsu
![]()
Received: Jun. 6th, 2018; accepted: Jul. 3rd, 2018; published: Jul. 10th, 2018

ABSTRACT
This paper investigates the robust preview tracking control for polytopic uncertain discrete-time systems with time-varying delay. Firstly, a model approximation is adopted to convert the system we considered to a linear discrete-time system with constant-time delay and approximation error, which will be treated as an external disturbance. Then, on the basis of the error system method, the augmented error system that includes preview able reference signal and external disturbance is derived by introducing a difference operator, which transforms the tracking problem into a regulator problem. And then, based on the LMI technique, sufficient condition of the robustly asymptotic stability is proposed for output feedback control closed-loop system and the design method of output feedback controller with preview tracking is given. Finally, the numerical simulation example illustrates the effectiveness of the results presented in this paper.
Keywords:Robust Preview Tracking Control, Augmented Error System, Time-Varying Delay, Polytopic Uncertain Systems, Linear Matrix Inequality
一类时变时滞不确定离散系统的预见跟踪控制
范 蓉1,王为群1,姚娟2
1南京理工大学理学院,江苏 南京
2南京理工大学自动化学院,江苏 南京
![]()
收稿日期:2018年6月6日;录用日期:2018年7月3日;发布日期:2018年7月10日

摘 要
本文针对具有时变时滞项的多面体不确定离散时间系统,研究了鲁棒预见跟踪控制问题。首先对时变时滞项作两项近似,并将近似误差看作外部扰动,则将原系统转换成受干扰抑制的常时滞不确定离散系统。其次,基于误差扰动的方法,通过引入一个差分算子导出一个包含可预见信息和外部扰动的增广误差系统。然后利用LMI技术,给出原系统在控制器下,闭环系统渐近稳定的充分条件并通过解LMI得到具有预见跟踪性能的输出反馈控制器。最后,通过数值算例验证了本文结论的有效性。
关键词 :预见跟踪控制,增广误差系统,时变时滞,多面体不确定系统,线性矩阵不等式

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
预见控制是一种通过充分利用系统已知的未来信息来设计控制器使得系统稳定的控制方法。它能够设计出具有信息补偿功能的控制器,使得系统的静态误差有效减小,系统的跟踪水平和响应速度显著提高 [1] 。预见控制的概念首次于1966年提出 [2] 。利用可预见信息,来提高闭环系统的跟踪性能是预见控制理论的主要研究内容,被应用于各种控制系统中:对于离散系统 [3] [4] ,引入差分算子构造增广误差系统,并分别通过LQI (线性二次积分)和LMI (线性矩阵不等式)技术得到状态反馈预见控制器。类似的,对于连续时间系统 [5] ,引入微分算子来构造增广误差系统,基于最优控制理论,导出了最优预见控制器。进一步,预见控制理论被推广到广义线性系统中 [6] [7] 。对于随机系统 [8] [9] ,构造一个包含引入的积分器的增广误差系统,将跟踪问题转换成一个调节器问题,再利用随机控制理论中的动态规划的方法解决预见跟踪控制问题。除此之外, [10] [11] 将预见控制理论与滑模控制系统结合。 [12] [13] 利用可预见信息考虑了模糊控制。 [14] 提出了具有 性能指标的预见控制器的设计方案。 [15] 基于博弈论,给出了具有 性能指标的预见控制器的设计方法。预见跟踪控制在实际中的应用有:汽车驾驶,机器人路径控制,优化无人机航迹等 [16] [17] [18] 。
在实际工程领域中,不确定因素是难以避免的。参数依赖的不确定系统(即凸多面体系统)是不确定系统的一种。文献 [19] [20] 描述了凸多面不确定系统的预见控制问题并通过对系统状态之间取差分的方式来构造增广误差系统,但是这样的构造方式不能直接用于时变时滞不确定系统,本文在这些工作的基础上考虑时变时滞不确定系统的预见跟踪控制问题。因为在实际工程中,考虑到状态变量并不是都是可测的,所以本文考虑给系统设计一个包含可预见信息的输出反馈控制器,使得系统输出在设计的控制器下能够准确跟踪到目标轨迹。
本文研究了参数依赖的不确定离散时变时滞系统,提出闭环系统渐近稳定的充分条件,并基于LMI工具箱给出预见输出反馈控制器的设计方案。通过数值仿真验真本文结果的有效性
2. 问题描述
考虑如下的时变时滞不确定离散系统:
(1)
其中 是系统的状态向量, 系统的输入控制, 是系统的输出。 , , , 是恰当维数的不确定系数矩阵,它们不依赖于时间变量k。 表示时变时滞,且满足: ,其中 和 是 的上下界。
假设1:系统(1)的不确定系数矩阵满足如下关系式:
(2)
其中 , , , , 为适当维数的常矩阵。 为不确定参数向量,满足:
(3)
假设2:参考信号 的预见长度为 即在时刻k, 步未来值 以及参考信号的现在和过去的值均可获得。并假定超过 步的未来值是不变的,即
(4)
注1:假设1表明系统 (1)的不确定系数矩阵和时间变量k无关,且参数向量 在s维凸多面体中取值。假设2是预见控制问题中的标准假设。理论研究和实际例子验证可预见信号仅在某一段步长内对系统的性能产生影响,超过预见长度的参考信号对系统性能的影响是比较弱的,因此本文中,假设超过预见长度的参考信号是个定常数。则显然有:
(5)
定义误差信号 为 。本文针对系统(1),研究预见跟踪问题,我们期望通过设计的控制器,使得系统的输出 能够实现对参考信号 的跟踪,即使得 能够成立。
本文需要如下引理:
引理1( [21] ):考虑矩阵 ,其中 和 是对称矩阵并且可逆;则以下条件等价:
(1) 。
(2) 。
(3) 。
引理2( [22] ):对于适当维数的矩阵T,R,S,N及数 , 成立如果满足不等式 :
引理3( [23] ):对于矩阵L, and ,存在关系 。
3. 预见控制器的设计
首先采用 [24] 中两项近似法,对系统(1)变形。然后采用预见控制理论中误差系统的方法来构造增广误差系统。
3.1. 模型变换
系统(1)中, , , , , 均是不确定的。对 取如下的近似:
(6)
其中 视作 的近似, 是近似误差且 。将(6)代入(1)中,则系统(1)变换为:
(7)
本文中将误差项看作外部扰动,则通过使用近似(6)将时变时滞不确定离散系统(1)转换成常时滞带有部部扰动的不确定离散系统(4)。
这种模型近似的方式具体过程参见 [24] 。
3.2. 增广误差系统的推导
定义差分算子:
, ,
,
对系统(7)等式两边取一阶向前差分,可以得到
(8)
基于(8),对误差信号取差分,有
(9)
联立(5)和(6),
(10)
其中,
, , , ,
, , ,
, , , 是误差系统的不确定矩阵,不依赖于时间变量k。考虑到系统(1)的测量输出以及参考信号的可测性,对于系统(10),我们可以记测量输出为:
(11)
其中 。
构造向量: ,记矩阵 ,根据假设2可以得到:
(12)
定义新的状态向量: ,则有:
(13)
其中 , , , , 。
注意到系统(13)的主要特征是未来信息 是状态向量的一部分。考虑到系统(1)的测量输出以及参考信号的可测性,对于系统(10)的测量输出可以取为:
(14)
其中 , 为元素均为1的p维列向量。
根据假设1可以得到:
, ,
,
则增广误差系统:
(15)
4. 预见控制器的设计
对导出的增广误差系统(15),设计如下的输出反馈控制器:
(16)
其中 和 分别是不确定参数矩阵和可调节变量且 , 。
基于(15)和(16)导出闭环系统:
(17)
基于设计的输出反馈控制器(16),如果闭环系统是渐近稳定的,则有
,注意到
是闭环系统状态
的一部分,即可得到
。因此我们设计一个包含参考信号预见行为的输出反馈控制器能够实现系统(1)的输出对参考信号的鲁棒跟踪目的。在(16)中,增益矩阵![]() 能够通过解LMI方法获得。
能够通过解LMI方法获得。
为导出闭环系统渐近稳定的充分条件,考虑(17)的标称系统:
(18)
系统(18)渐近稳定的充分条件由如下的定理1给出。
定理1:给定正数 ,可逆矩阵W和矩阵Q,系统(18)是鲁棒渐近稳定的如果存在一个正定矩阵 , , ,矩阵 和可逆矩阵 ,U使得
(19)
其中 为下列矩阵
证明:令 , ,由引理2,条件(19)能够保证:
(20)
又因为 ,所以
(21)
不等式(21)能够保证下式(22)成立(注:(22)式不等式左边作合同变换:前乘可逆对称阵 ,后乘它的转置阵,则可得到不等式(21),故(21)与(22)等价):
(22)
利用Schur补引理,由(23)式能够得到:
(23)
取Lyapunov函数:
(24)
其中 , , 。
定义 则有:
(25)
由(23),得到 ,则证得系统(17)是鲁棒渐近稳定的。
注意到定理1依赖不确定参数 ,以下定理2是在假设1的基础上,将定理1转换成一般LMI的形式,以便通过LMI工具箱得到相关矩阵的可行性解。
定理2:给定正数
,可逆矩阵W和矩阵Q,如果存在正定矩阵
,
,
,矩阵
和可逆矩阵![]() ,U
使得
,U
使得
(26)
其中,
则系统(17)是鲁棒渐近稳定,且增益矩阵 。控制器由下式给出:
(27)
证明:令 , , 。对(26)进行合同变换:左乘一个可逆对称阵 右乘它的转置阵,则有:
(28)
再根据定理1可以保证系统(17)渐近稳定,因此定理2得证。
基于定理1和定理2,我们给系统(1)设计具有预见跟踪性能的控制器由下面定理3给出。
定理3:如果假设1和假设2满足,且LMI(26)有一组可行性解,则设计的控制器为:
(29)
其中,
, , , , 。
证明:基于定理1和定理2,可以得到期望的预见控制器,其中增益矩阵 可通过解LMI(26)中的 和U得到 ,即有:
(30)
其中,
(31)
注意到 , , , ,令增益矩阵 ,则有 ,由 ,知道 。进一步,在假定 , , , 下得到:
(32)
定理3得证。
注2:矩阵 和可逆矩阵U由不等式(26)决定。等式(31)决定着 , , , , , , , , 以及 之间的关系。在控制器(29下,系统(1)的闭环系统的输出 能够准确的跟踪到参考信号 。
注3:根据(29),我们知道系统(1)的预见控制器包括三部分:第一部分是跟踪误差补偿,第二部分是输出反馈,最后一部分是可预见信息,表明控制器具备预见行为。
5. 数值仿真
考虑系统(1)的鲁棒预见跟踪控制问题。令
,
, .
这里我们取 , , ,并取矩阵 , 。不确定参数取 , 。本文仿真将从两种参考目标分别来考虑三种预见长度下的跟踪情况(① ; ② ; ③ )。
基于定理2,我们通过解LMI(24)得到矩阵变量 以及U,则增益矩阵 ( )能够计算得出。于是能够得到输出反馈增益矩阵 ,其中 能从LMI(24)中得到。
若 ,则 从而
若 ,则
若 ,则
假定 的初始状态为 ,我们可以得到如下的仿真结果。
情形1:参考信号取为
设计输出反馈控制器为: ,则仿真结果:
图1表示的是预见长度分别取为:① ;② ;③ 时,闭环系统的输出跟踪参考信号(情形1)的情况;
图2表示的是预见长度分别取为:① ;② ;③ 时闭环系统的控制输入;
图3是预见长度分别取为:① ;② ;③ 时闭环系统的跟踪误差。
图1和图3表明在设计的预见控制器下,系统(1)的输出能够有效地跟踪到参考信号。同时动态特征(峰值 ,峰值时间 ,上升时间 以及稳定时间 )能够反映出系统性能,仿真过程中可以发现闭环系统有一个期望的稳态响应特征:随着预见长度的增加,动态性能指数反而下降,即参考信号的预见长度越长,闭环系统的输出越能快速的跟踪到参考信号。
: , , ,
: , , ,
: , , ,
针对同一时变时滞,我们重新选择参考信号:
情形2:参考信号取为
类似的,我们能够得到如下的仿真结果:
图4表示的是预见长度分别取为:① ;② ;③ 时,闭环系统的输出跟踪参考信号(情形2)的情况;
图5表示的是预见长度分别取为:① ;② ;③ 时闭环系统的控制输入;
图6是预见长度分别取为:① ;② ;③ 时闭环系统的跟踪误差。
对于预见跟踪控制问题,利用渐近稳定性的定义得到闭环系统的状态渐近趋于平衡点0。对于系统(17),条件(26)保证系统渐近稳定,则可以得到 。误差信号 作为状态 的一部分必然有 ,于是实现闭环系统输出跟踪到参考信号的目的。图3和图6是闭环系统的输出与参考信号的跟踪误差轨迹图,可以看出在达到一定时间,跟踪误差趋于0,实现了预见跟踪控制。
6. 结论
本文考虑时变时滞的情况,研究了预见跟踪控制问题。通过设计一个预见控制器使得闭环系统的输
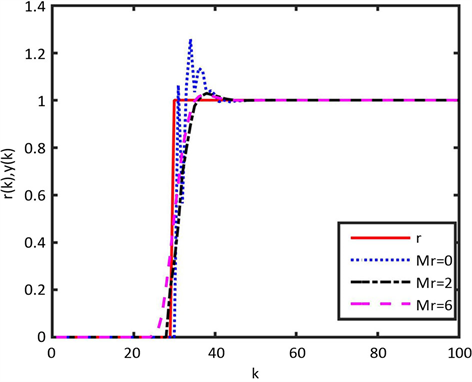
Figure 1. The reference signal (case 1) and output of closed-loop system
图1. 参考信号(情形1)以及闭环系统的输出
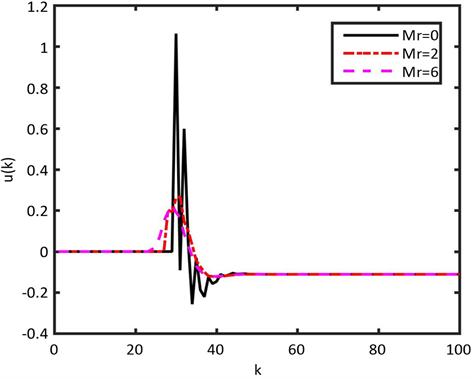
Figure 2. Control input of closed-loop system
图2. 闭环系统的控制输入
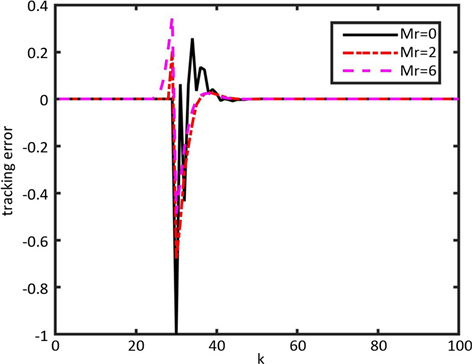
Figure 3. Tracking error of closed-loop system
图3. 闭环系统的跟踪误差

Figure 4. The reference signal (case 2) and output of closed-loop system
图4. 参考信号(情形2)以及闭环系统的输出
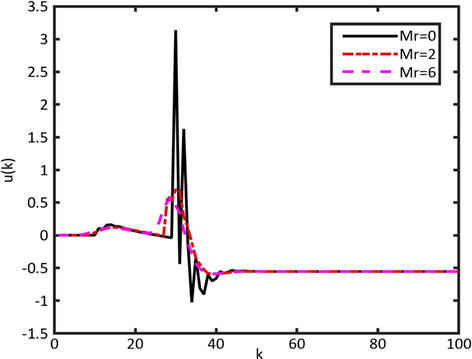
Figure 5. Control input of closed-loop system
图5. 闭环系统的控制输入
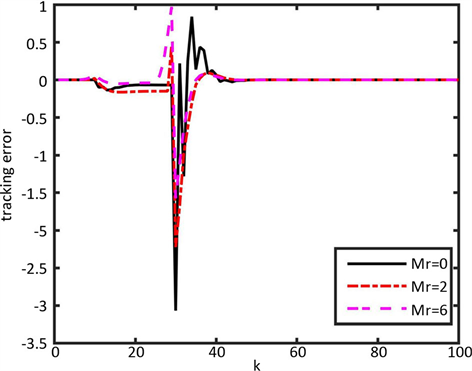
Figure 6. Tracking error of closed-loop system
图6. 闭环系统的跟踪误差
出能够准确跟踪到参考信号。对于跟踪问题,通过引入误差信号来构造增广误差系统,使其闭环系统渐近稳定来达到跟踪目的,并利用LMI工具箱求出增益矩阵得到预见控制器。但是时变时滞的影响会破坏系统的稳定性,且不能直接构造增广误差系统。本文给出了在时变时滞的影响下闭环系统渐近稳定的充分条件,并提出了具有预见行为的输出反馈控制器的设计方法。最后数值仿真说明了本文结论的有效性。
基金项目
在此对“国家自然科学基金”,基金号61603188的资助表示感谢。
文章引用
范 蓉,王为群,姚 娟. 一类时变时滞不确定离散系统的预见跟踪控制
Preview Tracking Control for a Class of Uncertain Discrete-Time System with Time-Varying Delay[J]. 动力系统与控制, 2018, 07(03): 201-213. https://doi.org/10.12677/DSC.2018.73022
参考文献
- 1. 徐玉洁, 廖福成, 刘艳霞, 张莉. 预见控制理论及其应用的研究综述[J]. 控制工程, 2017, 24(9): 1741-1750.
- 2. Sheridan, T.B. (1966) Three Models of Preview Control. IEEE Transactions on Human Factors in Electronics, HFE-7, 91-102. https://doi.org/10.1109/THFE.1966.232329
- 3. Katayama, T., Ohki, T., Inoue, T. and Kato, T. (1985) Design of an Optimal Controller for a Discrete-Time System Subject to Previewable Demand. In-ternational Journal of Control, 41, 677-699. https://doi.org/10.1080/0020718508961156
- 4. Li, L. and Liao, F. (2015) Design of a Preview Controller for Discrete-Time Systems Based on LMI. Mathematical Problems in Engineering, 2015, Article ID: 179126. https://doi.org/10.1155/2015/179126
- 5. Liao, F., Xu, Y. and Wu, J. (2015) Novel Approach to Preview Control for a Class of Continuous-Time Systems. Hindawi Publishing Corp., Cairo.
- 6. Zhao, L., Sun, F., Ren, J. and Li, B. (2016) Optimal Preview Control for a Class of Continuous Time-Invariant Descriptor Systems. Wireless Internet Technology, 37, 279-289. https://doi.org/10.1002/oca.2166
- 7. Liao, F., An, P. and Wang, D. (2012) The Optimal Preview Control for a Class of Descriptor Discrete-Time Systems with Multirate Setting. 24th Chinese Control and Decision Conference (CCDC), Taiyuan, 23-25 May 2012, 2430-2434. https://doi.org/10.1109/CCDC.2012.6243046
- 8. Wu, J., Liao, F. and Tomizuka, M. (2017) Optimal Preview Control for a Linear Continuous-Time Stochastic Control System in Finite-Time Horizon. International Journal of Systems Science, 48, 129-137. https://doi.org/10.1080/00207721.2016.1160456
- 9. 吴江. 几类线性随机系统的预见控制[D]: [博士学位论文]. 北京科技大学, 2017.
- 10. Yoshimura, T. (2013) Discrete-Time Adaptive Sliding Mode Controller for Vehicle Steering Systems with Preview. Journal of Vibration & Control, 19, 1587-1600. https://doi.org/10.1177/1077546312447835
- 11. Williams, M.M., Loukianov, A.G. and Bayro-Corrochano, E. (2015) ZMP Based Pattern Generation for Biped Walking Using Optimal Preview Integral Sliding Mode Control. 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, 15-17 October 2013, 100-105.
- 12. Cheng, J., Dong, X., Xue, J., Wang, X. and Zhi, J. (2014) Fuzzy Preview Controller Design for Air-craft-Pilot Closed Loop System. Acta Aeronautica Et Astronautica Sinica, 35, 807-820.
- 13. Liao, Y., Huang, J. and Zeng, Q. (2010) Preview Fuzzy Control Method for Intelligent Vehicle Path Tracking. IEEE International Conference on Progress in Informatics and Computing, 2, 1211-1214.
- 14. Agoes, A. (2005) H2 Control of Preview Systems. World Congress, 42, 924-924.
- 15. Gershon, E. and Shaked, U. (2017) State-Multiplicative Noisy Systems—H∞ Dynamic Output-Feedback Tracking with Preview. 25th Mediterranean Conference on Control and Automation (MED), Valletta, 3-6 July 2017, 1131-1136. https://doi.org/10.1109/MED.2017.7984270
- 16. 钱正祥, 张建富, 乐群. 无人机飞机航迹预见控制技术研究[J]. 仪器仪表学报, 2004(S1): 1032-1033.
- 17. 曹洋, 周云龙, 徐心和. 轮式移动机器人预见预测运动控制[J]. 计算机工程与应用, 2003, 39(31): 5-7.
- 18. 张彦栋, 王青元, 刘强强, 等. 自动驾驶系统运行模式曲线最优预见跟踪控制算法[J]. 计算机应用, 2017(a02): 266-269.
- 19. Takaba, K. (1998). Robust Preview Tracking Control for Polytopic Uncertain Systems. Proceedings of the 37th IEEE Conference on Decision and Control, Tampa, 18 December 1998, 1765-1770. https://doi.org/10.1109/CDC.1998.758551
- 20. Li, L. and Liao, F. (2016) Parameter-Dependent Preview Control with Robust Tracking Performance. IET Control Theory & Applications, 11, 38-46. https://doi.org/10.1049/iet-cta.2016.0361
- 21. Carlson, D. (1986) What Are Schur Complements, Anyway? Linear Algebra & Its Applications, 74, 257-275. https://doi.org/10.1016/0024-3795(86)90127-8
- 22. Chang, X.H., Zhang, L. and Ju, H.P. (2015) Robust Static Output Feedback [Formula Omitted] Control for Uncertain Fuzzy Systems. Fuzzy Sets & Systems, 273, 87-104. https://doi.org/10.1016/j.fss.2014.10.023
- 23. De Oliveira, M.C., Geromel, J.C. and Bernussou, J. (2002) Ex-tended H2 and H Norm Characterizations and Controller Parametrizations for Discrete-Time Systems. International Journal of Control, 75, 666-679. https://doi.org/10.1080/00207170210140212
- 24. Li, X. and Gao, H. (2011) A New Model Transformation of Discrete-Time Systems with Time-Varying Delay and Its Application to Stability Analysis. IEEE Transactions on Au-tomatic Control, 56, 2172-2178. https://doi.org/10.1109/TAC.2011.2146850