Dynamical Systems and Control
Vol.
07
No.
04
(
2018
), Article ID:
27119
,
12
pages
10.12677/DSC.2018.74034
Adaptive Control for Active Suspension Systems with State Constraints
Lei Liu, Fengyi Yuan
College of Science, Liaoning University of Technology, Jinzhou

Received: Sep. 22nd, 2018; accepted: Oct. 8th, 2018; published: Oct. 15th, 2018

ABSTRACT
This paper studies the neural-network-based adaptive control problem for the active suspension systems, in which the neural networks are employed to approximate the system unknown terms. Considering the comfort of the passengers and the safety of the vehicle, the system states are required to satisfy some certain constraint conditions. In order to solve this problem, the backstepping technique and the Barrier Lyapunov function method are used. Meanwhile, considering the actuator saturation problem, the actuator in this paper needs to satisfy some constraints, and the effectiveness caused by actuator saturation is counteracted by introducing an auxiliary system. Finally, the simulation results explain the effectiveness of the proposed method.
Keywords:Active Suspension Systems, Neural Networks, Adaptive Control, Actuator Saturation, Constraint Control
具有状态约束的主动悬架系统的自适应控制
刘磊,袁凤仪
辽宁工业大学,理学院,辽宁 锦州
收稿日期:2018年9月22日;录用日期:2018年10月8日;发布日期:2018年10月15日

摘 要
本文针对主动悬架系统,研究了其基于神经网络的自适应控制问题,其中,神经网络用来逼近系统中的不确定项。考虑到行驶过程中,乘客的舒适性以及车辆的安全性,要求系统状态满足一定的约束条件,基于backstepping技术和障碍李雅普诺夫函数方法,解决了此约束问题。同时,考虑到执行器饱和的问题,本文的执行器要求在一定约束范围内,通过引入辅助系统,抵消了饱和带来的影响。最后,仿真结果说明了本文所提方法的有效性。
关键词 :主动悬架系统,神经网络,自适应控制,执行器饱和,约束控制

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着控制理论的不断发展,越来越多的实际控制系统受到关注,汽车悬架系统作为车辆的重要组成部分也备受广大学者的关注,尤其是随着人们对汽车性能要求的日益提高,传统的被动悬架系统已不能满足乘客对舒适度和安全性的要求,主动悬架系统成为了时代的主流。目前针对主动悬架系统已有一些研究成果存在,例如,在文献 [1] 中,作者提出了一种依赖负载的控制器设计方法用以解决主动悬架系统的多目标控制问题。文献 [2] 研究了有限频域内主动悬架系统的控制问题,通过运用广义Kalman-Yakubovich-Popov (KYP)引理,减小了特定频带内从干扰到控制输出的范数,进而提高了行驶过程中的舒适性。然而,在主动悬架系统中,由于未知的阻尼系数,未知的转动惯量等因素的存在,使得主动悬架系统成为一个带有不确定性的系统。针对这些不确定性,学者们提出了各种处理方法。文献 [3] 提出了基于滑膜的控制方法用来处理扰动引起的不确定性。文献 [4] 基于线性矩阵不等式,给出了 控制的充分条件,提出了一种鲁棒控制方法。针对系统中存在不确定动态的情形,文献 [5] [6] [7] [8] 基于智能方法(Neural networks,NNs和Fuzzy Logic systems,FLSs)的万能逼近性,提出了相应的自适应控制方法。
主动悬架系统的一大特性是可以减小行驶过程中车辆传递到乘客的力量,尤其是在恶劣的行驶环境下,乘客对车辆的舒适性要求尤为明显。针对舒适性的要求主要表现在车身的颠簸程度,也就是车身的垂直位移及速度。只要车身的垂直位移及速度在一定的约束范围内,则可以保证车身振动不会太大,从而传递给乘客的振动便不会很大。对于车辆的这种约束问题可以转化为状态约束问题,其中车身的垂直位移及速度分别是主动悬架系统的两个状态。那么解决状态约束,最常用的方法是障碍李雅普诺夫函数方法。基于障碍李雅普诺夫函数方法来解决约束问题的结果已有很多。例如,文献 [9] 为自主航天器交会与近距离操作提出了一种六自由度相对运动控制方法,在此过程中,同时考虑了输入饱和,全状态约束,运动耦合,参数不确定性,匹配和不匹配扰动的问题。文献 [10] 研究了一类不确定切换高阶非线性系统的鲁棒自适应状态约束控制问题,通过综合齐次控制法和参数分离原理,设计了一个鲁棒状态反馈控制器。
另外,对于任何实际物理系统,我们都不能忽略执行器的饱和问题 [11] [12] [13] [14] ,否则可能导致系统性能下降甚至不稳定,主动悬架系统也不例外。基于以上论述,本文研究了具有不确定性的主动悬架系统的自适应控制问题,采用神经网络对系统的不确定性进行逼近。并同时考虑了状态约束和执行器饱和问题。分别采用障碍李雅普诺夫函数方法和构造辅助信号的方法解决了状态约束和执行器饱和问题。通过backstepping技术构造的自适应控制器使得闭环系统所有信号都有界,且系统输出能跟踪上参考信号。最后的仿真结果验证了方法的有效性。
2. 问题描述
本文考虑如图1所示的四分之一主动悬架系统,其动力学方程可描述为
(1)
(2)
其中, 表示簧载质量, 是非簧载质量, 代表轮胎的弹性刚度, 是线性阻尼系数, 表示车身位移, 代表车轮位移, 是道路输入, 是控制力, 代表非线性弹簧,表达式为
令汽车行驶时的簧载质量位移 ,簧载质量速度 ,非簧载质量位移 ,非簧载质量速度 ,则可将上述悬架系统转换为如下状态空间表示形式
(3)
其中, 是系统状态向量,且状态 和 分别满足约束条件 和 。
是未知有界函数, 是未知有界参数, 和 分别是 的上界和下界。 是系统输出。另外本文考虑执行器饱和的存在,因此要求控制输入 满足如下条件
(4)
其中, 是常数, 是待设计的控制律。

Figure 1. Structure diagram of active suspension system
图1. 主动悬架系统结构图
控制目标:设计自适应控制律 使得 满足执行器饱和约束条件,同时闭环系统所有信号都有界,且系统输出能跟踪上参考信号 。另外,状态 和 分别满足约束条件 和 。
假设1:参考信号 有界,即 ,同时二阶可导,且其一阶导数 和二阶导数 均有界。
引理:对任意实数 ,其中 是任意正常数,总有
其中, 是正整数。
3. 神经网络逼近
假设函数 是定义在紧集 上的一个未知连续函数,则存在一个神经网络 ,对于任意的 ,都有
成立。其中, 是神经网络理想权重向量, 是神经网络输入, 是基函数向量, 是逼近误差。通常假设神经网络理想权重向量和逼近误差均是有界的。
假设2:神经网络理想权重向量 和逼近误差 均有界,即 和 ,其中, 和 都是正常数。
4. 自适应控制器设计
本文采用反步法设计控制器,首先定义如下坐标变换
其中, 是虚拟控制器,将在第一步设计中给出。
第一步:考虑 ,根据式(3),可得其导数为
(5)
又因为 ,所以 可重写为
(6)
考虑如下障碍李雅普诺夫函数
(7)
其中, 。则 沿着时间的导数为
(8)
将式(6)代入式(8),可得
设计如下虚拟控制器
(9)
其中, 是正常数。进一步可得 为
(10)
第二步:考虑 和 ,可得 的导数为
(11)
为了消除饱和带来的影响,构造如下辅助系统
(12)
其中, 是辅助系统的状态, , , 是一个小的正常数。
选择如下李雅普诺夫函数
(13)
其中, 是估计误差,且 是 的估计,并定义
(14)
于是,可得 沿着时间的导数为
(15)
由于 和 是未知的,因此本文采用RBFNN来逼近未知项 ,从而有
(16)
其中, 是神经网络权重, 是径向基函数向量, 是逼近误差, 是神经网络输入。
将式(16)代入式(15),可得
(17)
根据杨氏不等式,有下式成立
(18)
综合式(12),式(17)和式(18),我们有
由于 ,故 可重写为
根据式(14),可得 ,从而有
(19)
设计实际控制律为
(20)
其中, 是常数。于是, 可进一步表示为
(21)
再次利用杨氏不等式,可得
(22)
将式(22)代入到式(21),有
(23)
设计如下自适应律
(24)
基于式(23)和式(24),我们有
(25)
考虑如下不等式
从而可得
(26)
于是,可得如下主要结果。
5. 主要结果
定理:考虑带有执行器饱和(4)的主动悬架系统(3),基于假设1~2,设计虚拟控制器(9),实际控制器(20)和自适应律(24),则闭环系统所有信号都有界,且系统输出能跟踪上参考信号 。同时,状态 和 分别满足约束条件 和 。
证明:考虑如下李雅普诺夫函数
(27)
基于上述分析,可得
根据第2章节的引理,我们有
(28)
令
则有
(29)
将式(29)左右两侧同时乘以 ,可得
并进一步将上式的两侧同时在区间 上进行积分运算,我们有
(30)
由式(27)和式(30),可得
(31)
解不等式(31),可得
(32)
同理,我们有
(33)
可见 和 均是有界的。因为 和 ,所以 。又因为, ,从而可得 。观察式(9)中 的定义,可见 是关于 和 的函数,因为 和 是有界的,所以 也是有界的,假设 。根据 ,有 。令 ,可得 。另外,因为 和 是有界的,根据 ,可知 也是有界的。由式(20),易知 是关于 和 的函数,因为 和 均是有界的,所以 也是有界的。至此闭环系统所有信号都有界。
证毕。
6. 性能分析
根据上述分析,我们知道系统输入和状态 均满足相应约束条件。下面,将给出系统另外两个方程的性能分析。在这部分内容中,首先分析状态 的有界性,其次为保证行驶的安全性,需要悬架空间在其可允许的范围内,即 ,且轮胎的动载不能超过其静载,即 。
如文献 [15] 方法所述,将式(20)代入 ,可得如下动态系统
(34)
其中,
。
显然,对于有界的 ,可知 也是有界的,假设其上界为 ,即 。
由矩阵 的定义可知,矩阵 是稳定的,也就是说存在正定矩阵 ,使得如下李雅普诺夫方程
(35)
成立,其中 是正定矩阵。
选择如下李雅普诺夫函数
(36)
对 沿着式(34)求导,可得
(37)
应用杨氏不等式,有下式成立
(38)
其中, 是设计参数。将式(35)和式(38)代入式(37),有
(39)
其中, , 。
解不等式(39),可得
根据 的定义,进一步可得
因此,状态 是有界的。下面来分析该主动悬架系统在行驶过程中的安全性能。首先分析悬架空间的性能。由于在上述分析中,我们知道所有信号都是有界的,因此有
通过调节参数相应参数,可使
成立。于是悬架空间在其可允许的范围内,即 ,因此是安全的。
接下来分析轮胎的动载是否超过其静载。动态轮胎负载的界限为
通过调节处置和相应设计参数,使得
成立,则有 。因此,轮胎的动载没有超过其静载,是安全的。
7. 仿真算例
为了进一步说明所提方法的有效性,本节针对第一节考虑的主动悬架系统进行仿真实验。
本仿真中,相关设计参数选取为 , , , , , , , , , ,系统状态初值为 。
此外,选择参考信号为 。状态 和 要求分别满足约束条件 和 。
仿真结果如图2~图5所示。图2描述的是系统输出的跟踪轨迹,以及 的约束轨迹。从图中,可以看见跟踪效果良好,并且状态 在其约束范围内。图3展示的是状态 及其约束的轨迹,可见状态 也在其约束范围内。另外,图4和图5分别描绘了状态 和 的轨迹。由图2~图5可知,这些信号均是有界的。
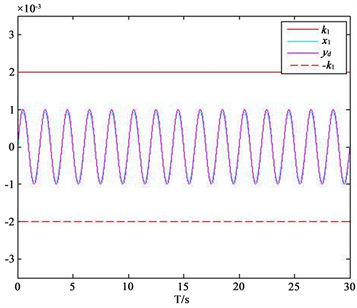
Figure 2. Tracking curve of x1
图2. x1的跟踪曲线
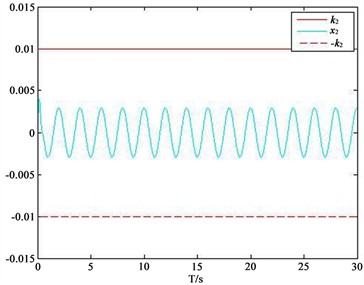
Figure 3. x2 and its constraint trajectory
图3. x2及其约束的轨迹
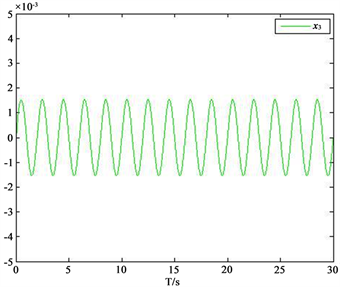
Figure 4. Trajectory of x3
图4. x3的轨迹

Figure 5. Trajectory of x4
图5. x4的轨迹
8. 结论
本文研究了不确定主动悬架系统的自适应控制问题,利用神经网络对系统的不确定项进行逼近。系统状态要求一定约束条件,通过采用障碍李雅普诺夫函数方法,有效地解决了此问题。同时考虑了执行器饱和问题,通过引入一个辅助系统,成功抵消了饱和带来的影响。运用backstepping技术构造的自适应控制器,使得闭环系统所有信号都有界,并且系统输出可以跟踪上参考信号。另外,还对悬架系统的安全性进行了分析。最后,仿真结果证明了方法的有效性。
基金项目
国家自然科学基金(61803190, 61803189, 61603164),辽宁省高校基本科研业务费重点项目(JZL201715402),辽宁特聘教授,辽宁省高等学校创新团队(LT2016006)。
文章引用
刘 磊,袁凤仪. 具有状态约束的主动悬架系统的自适应控制
Adaptive Control for Active Suspension Systems with State Constraints[J]. 动力系统与控制, 2018, 07(04): 298-309. https://doi.org/10.12677/DSC.2018.74034
参考文献
- 1. Gao, H., Lam, J. and Wang, C. (2006) Multi-Objective Control of Vehicle Active Suspension Systems via Load-Dependent Controllers. Journal of Sound & Vibration, 290, 654-675.
https://doi.org/10.1016/j.jsv.2005.04.007 - 2. Sun, W., Gao, H. and Kaynak, O. (2011) Finite Frequency, Control for Vehicle Active Suspension Systems. IEEE Transactions on Control Systems Technology, 19, 416-422.
https://doi.org/10.1109/TCST.2010.2042296 - 3. Deshpande, V.S., Mohan, B., Shendge, P.D., et al. (2014) Disturb-ance Observer Based Sliding Mode Control of Active Suspension Systems. Journal of Sound and Vibration, 333, 2281-2296.
https://doi.org/10.1016/j.jsv.2014.01.023 - 4. Du, H., Lam, J. and Sze, K.Y. (2003) Non-Fragile Output Feedback Vehicle Suspension Control Using Genetic Algorithm. Engineering Applications of Artificial Intelligence, 16, 667-680.
https://doi.org/10.1016/j.engappai.2003.09.008 - 5. Lian, R.J. (2013) Enhanced Adaptive Self-Organizing Fuzzy Sliding-Mode Controller for Active Suspension Systems. IEEE Transactions on Industrial Electronics, 60, 958-968.
https://doi.org/10.1109/TIE.2012.2190372 - 6. Wen, S., Chen, M.Z.Q., Zeng, Z., et al. (2017) Fuzzy Control for Uncertain Vehicle Active Suspension Systems via Dynamic Sliding-Mode Approach. IEEE Transactions on Systems Man and Cybernetics Systems, 47, 24-32.
https://doi.org/10.1109/TSMC.2016.2564930 - 7. Lin, J. and Lian, R.J. (2011) Hybrid Self-Organizing Fuzzy and Radial Ba-sis-Function Neural-Network Controller for Active Suspension Systems. International Journal of Innovative Computing Information and Control (IJICIC), 7, 3359-3378.
- 8. Zhao, F., Dong, M., Qin, Y., et al. (2015) Adaptive Neural-Sliding Mode Control of Active Suspension System for Camera Stabilization. Shock and Vibration, 2015, 1-8.
https://doi.org/10.1155/2015/542364 - 9. Sun, L., Huo, W. and Jiao, Z. (2016) Adaptive Backstepping Control of Spacecraft Rendezvous and Proximity Operations with Input Saturation and Full-State Constraint. IEEE Transactions on Industrial Electronics, 64, 480-492.
https://doi.org/10.1109/TIE.2016.2609399 - 10. Liu, L. and Yang, X. (2017) Robust Adaptive State Constraint Control for Uncertain Switched High-Order Nonlinear Systems. IEEE Transactions on Industrial Electronics, 64, 8108-8117.
https://doi.org/10.1109/TIE.2017.2701774 - 11. Jiang, B., Hu, Q. and Friswell, M.I. (2016) Fixed-Time Attitude Control for Rigid Spacecraft with Actuator Saturation and Faults. IEEE Transactions on Control Systems Technology, 24, 1892-1898.
https://doi.org/10.1109/TCST.2016.2519838 - 12. Li, H., Wang, J. and Shi, P. (2016) Output-Feedback Based Sliding Mode Control for Fuzzy Systems with Actuator Saturation. IEEE Transactions on Fuzzy Systems, 24, 1282-1293.
https://doi.org/10.1109/TFUZZ.2015.2513085 - 13. Pan, H., Sun, W., Gao, H., et al. (2016) Disturbance Observer-Based Adaptive Tracking Control with Actuator Saturation and Its Application. IEEE Transactions on Automation Science and Engineering, 13, 868-875.
https://doi.org/10.1109/TASE.2015.2414652 - 14. Ran, M., Wang, Q. and Dong, C. (2016) Stabilization of a Class of Nonlinear Systems with Actuator Saturation via Active Disturbance Rejection Control. Automatica, 63, 302-310.
https://doi.org/10.1016/j.automatica.2015.10.010 - 15. Zhao, F., Ge, S.S., Tu, F., et al. (2016) Adaptive Neural Network Control for Active Suspension System with Actuator Saturation. IET Control Theory and Applications, 10, 1696-1705.
https://doi.org/10.1049/iet-cta.2015.1317