Advances in Energy and Power Engineering
Vol.04 No.06(2016), Article ID:19421,9
pages
10.12677/AEPE.2016.46031
Influence of Yaw Control of Upstream Wind Turbines on Power of Downstream
Le Ma, Ying Deng
North China Electric Power University, Beijing

Received: Nov. 29th, 2016; accepted: Dec. 25th, 2016; published: Dec. 28th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
At present, the research on the yaw control strategy of wind turbines is mainly focused on the maximum power tracing of a single wind turbine, which cannot take into account the influence of wake on the power of downstream wind turbines. Therefore, this paper mainly focuses on the study of the center deviation of the wake turbulence in the yaw state of the upstream wind turbine. According to the existing theoretical basis, the simplification formula of the wake displacement is deduced, and the formula is programmed in MATLAB. The relationship between the parameters of the wake displacement is obtained, and the relationship between the parameters is analyzed. Then the model of wind turbine was established in Bladed software and the two sets of wind turbine with 7 times wind wheel diameter were taken by the center deviation of the wake center. Under certain wind direction, the wind turbine was active yaw control. After a certain angle, the power characteristics of the two units were analyzed and summarized.
Keywords:Wind Turbine, Active Yaw, Wake Offset, Wind Turbine Power

上游风电机组偏航控制对下游机组 功率影响研究
马玏,邓英
华北电力大学,北京

收稿日期:2016年11月29日;录用日期:2016年12月25日;发布日期:2016年12月28日

摘 要
目前风电机组偏航控制策略研究主要是集中在单台风力发电机组的最大功率追踪,没能考虑到尾流对下游风电机组功率的影响。因此本文主要围绕上游风电机组偏航状态下,其尾流中心偏移量进行系统的研究。根据现有的理论依据推到出尾流偏移量的简化计算公式,依据推公式在MATLAB中编程计算。得到尾流偏移量各参数之间的关系,并对参数之间的关系进行分析。随后在Bladed软件中建立风力发电机组模型,并利用得到的尾流中心偏移量,进行两台距离7倍风轮直径的风电机组在某一特定风向条件下,由上游风电机组主动偏航控制一定角度后,对两台机组功率的特性进行分析与总结。
关键词 :风电机组,主动偏航,尾流偏移量,风电机组功率

1. 引言
在风力发电场中,风电机组会在偏航系统的控制作用下自动调整机舱的位置,以使风轮正面迎风,但在某一特定风向条件下,如某两台风力发电电机组叶轮中心的连线会与来流风向平行。这时,上游风电机组机舱内的偏航电机会受偏航控制系统发出的偏航对风指令,启动偏航对风,使风电机组的机舱朝向这个特定的风向,从而获得最佳发电功率。但是上游风电机组的机舱在这个偏航位置时,下游风电机组的工作环境会完全处于上游机组的尾流区域中,这时上游风电机组所产生的尾流中心会落在与下游风电机组叶轮中心区域附近,这就使得下游风电机组的输出功率受到较大影响。
通过对上游风电机组主动偏航控制,使风轮偏向一侧(风轮顺时针旋转)一定角度,这时上游风电机组所产生的尾流会发生偏移,其尾流中心线会偏离下游风电机组风轮中心。这时上游风电机产生的尾流对下游风电机组的影响就会降低,从而提高下游风电机组的功率。但上游风发电机组偏航一定度数后,其功率会有一定的损失,这时就可以在上游风电机组损失功率与下游风电机组避开尾流中心区域提高功率之间找到两台风力发电机组功率之和的最大值。其最大值所对应的上游风电机组的偏航角度即为最佳偏航角度。
2. 风电机组功率
风力发电机组机械功率 可以由下式表示 [1] :
可以由下式表示 [1] :
 (2-1)
(2-1)
 (2-2)
(2-2)
其中: ——为风电机组风轮扫风面积;
——为风电机组风轮扫风面积;
 ——为空气密度;
——为空气密度;
 ——为叶尖比;
——为叶尖比;
 ——桨距角;
——桨距角;
 ——为风能转换系数;
——为风能转换系数;
 是叶尖速比和桨距角的高阶非线性函数,可用以下关系表示
是叶尖速比和桨距角的高阶非线性函数,可用以下关系表示
 (2-3)
(2-3)
 (2-4)
(2-4)
由式(2-3)和(2-4)得风能利用系数 与叶尖速比
与叶尖速比 和桨距角
和桨距角 之间的关关系可由如图1所示。
之间的关关系可由如图1所示。
对于变桨距风力发电机组而言,可以在控制上通过变桨调节来控制转速,从而追踪最佳叶尖速比使功率系数保持在最大点 上。这时风力发电机组的功率为
上。这时风力发电机组的功率为
 (2-5)
(2-5)
3. 尾流偏移
当风力发电机组偏航时,由于受到在与风向垂直方向上的诱导速度分量的影响,尾流会偏移到另一侧。气流流过上游风电机组风轮后,尾流中心线上的各个点在中心线上沿下游方向的切线与来流风速的夹角随着尾流的不断延伸而逐渐减小。如图2 [7] 和图3 [7] 所示为同过CFD仿真得到上游风电机组未偏航与偏航时尾流区域示意图。对比两者可以直观的看出上游风电机组偏航后尾流的发展情况。在距离上游风电机组7倍风轮直径处的下游风电机组受到的上游风电机组的尾流中心明显偏向偏航的反方向,受到上游风电机组尾流的影响减弱。

Figure 1. The relationship between power factor and pitch angle
图1. 功率系数与桨距角叶尖速比之间的关系
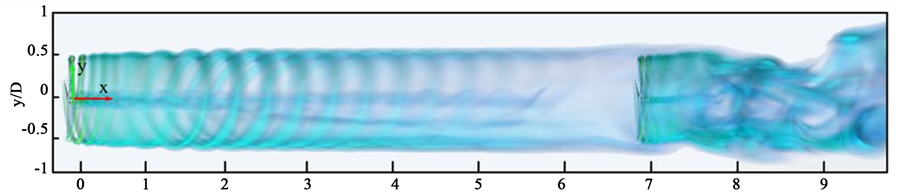
Figure 2. A schematic view of the wake area without yaw
图2. 未偏航时尾流区域俯视示意图

Figure 3. A schematic view of the wake area in yaw
图3. 偏航时尾流区域俯视示意图
图4 [7] 为风力发电机组尾流中心偏移示意图,其中绿色区域为上游风电机组的尾流在下游机组风轮所在平面的纵向切面,紫色区域为下游风电机组的扫风面积,两个区域之间的重叠部分即为尾流区域对下游风电机组的影响区域。
上游风电机组偏航 角度后,由偏航引起的尾流偏移量可从P.M.O. Gebraad等人 [5] [6] 的研究中得到如下关系
角度后,由偏航引起的尾流偏移量可从P.M.O. Gebraad等人 [5] [6] 的研究中得到如下关系
 (3-1)
(3-1)
其中a为未偏航时的诱导因子, 为一个无量纲的模型参数,其大小反映了尾流偏移的角度对偏航度数的敏感度,
为一个无量纲的模型参数,其大小反映了尾流偏移的角度对偏航度数的敏感度, 为下游距离多少倍风轮直径。
为下游距离多少倍风轮直径。
Fleming等人研究发现 [3] [4] [5] ,当上游风力发电机组没有偏航时,其尾流也会有一个微小的偏移量。这是由于旋转的尾流与边界层的垂直剪切作用。当风轮顺时针旋转的时候,风轮之后的尾流会逆时针旋转,这使得在边界层下层的低速气流会被向上卷起向右侧偏离,边界层上层的高速气流会向下卷动并向左偏离。因此尾流右侧的速度损失量增加,尾流向右侧偏离。由未偏航引起的尾流偏移量可以线性表达为 [4] [5] [6]
 (3-2)
(3-2)
综上所述,上游风电机组偏航状态下的尾流中心偏移量为
 (3-3)
(3-3)
根据以上理论分析在MATLAB环境中编写计算程序,所得结果如下:偏航角度越大尾流中心偏移量的变化率越小,当偏航度数超过30˚时,由偏航引起的尾流中心偏移量趋近与零。
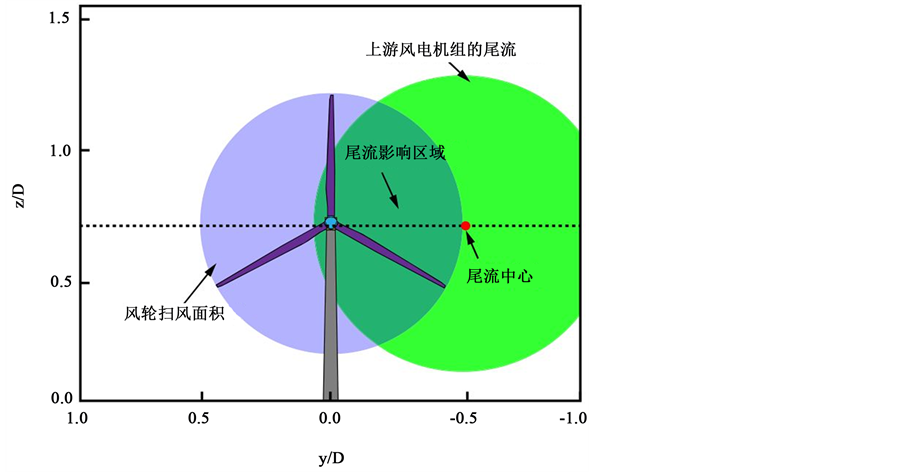
Figure 4. Schematic diagram of wake center deviation of wind turbine
图4. 风力发电机组尾流中心偏移示意图
4. 上游风电机组固定偏航工况下的功率计算
4.1. 风力发电机组模型选取
在计算尾流中心偏移量之前先对计算所选取的模型进行介绍,本文所研究的目标风电机组模型为Bladed5MW近海风电机组,其主要参数如表1所示。
计算尾流中心偏移量过程中,需要得到风电机组的固定偏航状态模型,GH-Bladed软件是英国GH公司开发的一款风电机组设计仿真软件,具有强大的计算与仿真功能。这里我们将所选取的机组模型参数带入Bladed软件中计算得到模型的功率曲线与推力系数等重要参数。
4.2. 固定偏航角度对上游风电机组功率的影响
对计算偏航角度对风电机组功率的影响影响之前,先搭建计算软件平台,这里设置风速模型为80米高度的9 m/s恒风。通过改变恒风风向来模拟机组偏航角度。偏航以5˚为单位,模拟−40˚~40˚区间内不同偏航角度对功率的影响,仿真计算步长设置为0.05 s,时间为30 s,仿真计算结果如图5所示。从仿真结果可以看出,上游风电机组偏航角度对功率的影响随着偏航角度的增加功率降低,功率亏损基本满足 。
。
5. 尾流中心偏移量对下游风电机组功率的影响
当风电场中的来流风速 与上游风电机组和下游风电机组的中心连线平行时,下游风电机组完全处于上游风电机组尾流区域中,如图6所示。本文主要讨论此风向条件下,上游风电机组偏航的角度对下游风电机组功率的影响。
与上游风电机组和下游风电机组的中心连线平行时,下游风电机组完全处于上游风电机组尾流区域中,如图6所示。本文主要讨论此风向条件下,上游风电机组偏航的角度对下游风电机组功率的影响。
Bladed软件中在风速模型选项卡中,可以设置上游风电机组尾流模型及其参数,风轮直径 ,上下游风电机组之间的距离为7倍风轮直径即840 m,上游风电机组推力系数与叶尖速比分别由上一小节Bladed模型中求得
,上下游风电机组之间的距离为7倍风轮直径即840 m,上游风电机组推力系数与叶尖速比分别由上一小节Bladed模型中求得 为
为 、
、 。尾流中心偏移量可由公式(3-2)、(3-3)求得则上游风电机组不同偏航角度下,尾流中心偏移量如表2所示。
。尾流中心偏移量可由公式(3-2)、(3-3)求得则上游风电机组不同偏航角度下,尾流中心偏移量如表2所示。

Figure 5. Power loss of upstream wind turbine
图5. 上游风电机组功率损失
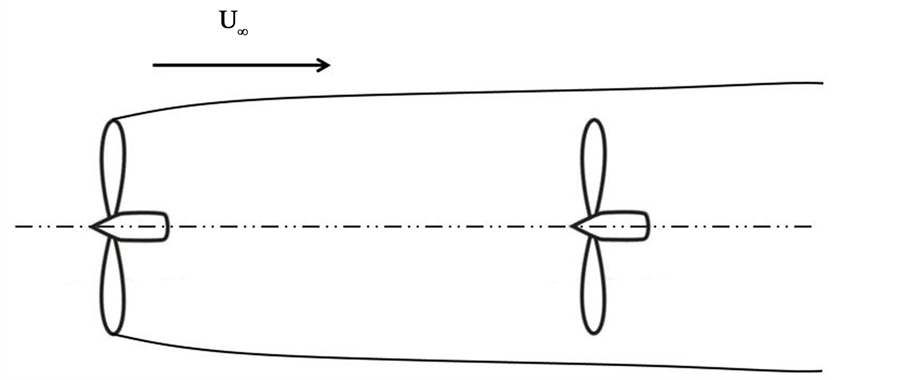
Figure 6. The influence of the wake current on the parallel flow velocity between the incoming wind speed and the center of the two units
图6. 来流风速与两台机组中心连平行时尾流影响示意图

Table 1. System resulting data of standard experiment
表1. 标准试验系统结果数据
将得到的尾流中心偏移量参数写入Bladed中分别求出上游不同偏航角度下,下游风电机组的功率仿真结果如下。
由图7仿真结果可以明显看出尾流中心偏移量对下游风电机组输出功率的提升有很大帮助,但下游风电机组输出功率的提升是由上游风电机组偏航牺牲自身功率所带来的。因此在评估最佳偏航角度时需要考虑两台风电机组总体的输出功率。
若将每个偏航角度上游风电机组的功率与下游风电机组的功率相加,求出两台风电机组输出功率的总和,对比就可以得到两台机组功率的最大值所对应的上游风电机组的偏航度数角度。即为来流风向与两台风电机组中心连线平行时,上游风电机组最佳偏航角度。如图8所示为偏航20˚时两台风电机组的功率示意图。
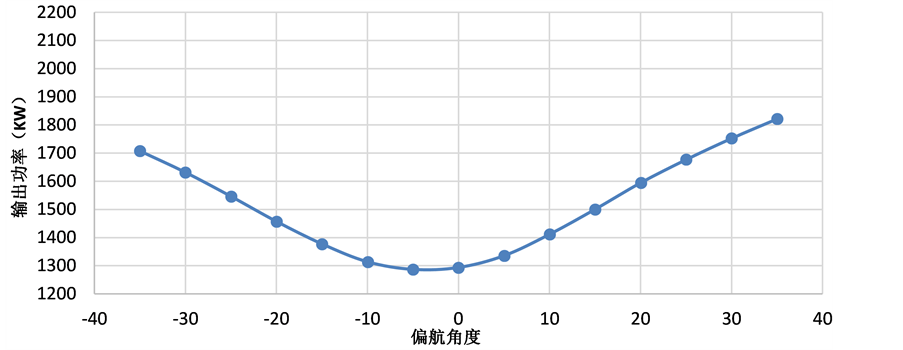
Figure 7. Downstream wind turbine power upgrade
图7. 下游风电机组功率提升
Table 2. Offset of wake center at different yaw angles
表2. 不同偏航角度下尾流中心的偏移量
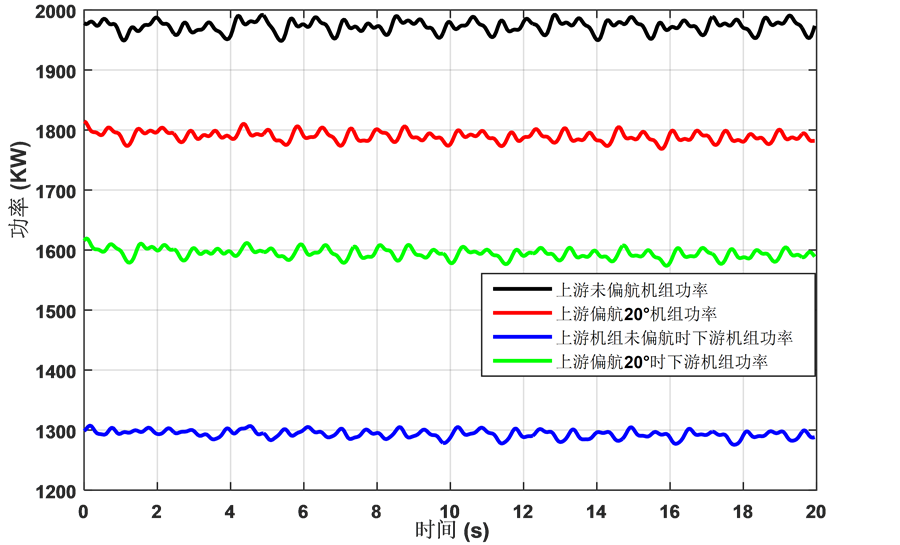
Figure 8. Simulation results of the power of two turbines
图8.两台机组功率仿真结果
6. 结论
上游风电机组正向偏航时,两台机组输出总功率随着偏航角度的增加而增加,但当偏航角度超过30˚时,总输出功率低于上游机组未偏航时的两台机组总功率,这是由于当偏航角度大于30˚时,尾流中心偏移量的增量趋近与零,而上游风电机组偏航超过30˚时功率下降明显。在某一风向下,若上游风电机产生的组尾流中心与下游风电机组叶轮中心的距离为负时,上游风电机组偏航控制对两台风电机组总体功率的提升没有帮助。两台风电机组功率之和的最大值出现在上游风电机组偏航20˚到25˚之间,考虑到由于上游风电机组偏航后对风轮载荷的影响,所以可以得出最佳偏航角度为20˚。
文章引用
马 玏,邓 英. 上游风电机组偏航控制对下游机组功率影响研究
Influence of Yaw Control of Upstream Wind Turbines on Power of Downstream[J]. 电力与能源进展, 2016, 04(06): 251-259. http://dx.doi.org/10.12677/AEPE.2016.46031
参考文献 (References)
- 1. 徐大平. 风力发电原理[M]. 机械工业出版社, 2011..
- 2. Jiménez, Á., Crespo, A. and Migoya, E. (2010) Application of a LES Technique to Characterize the Wake Deflection of a Wind Turbine in Yaw. Wind Energy, 13, 559-572. https://doi.org/10.1002/we.380
- 3. Fleming, P.A., Gebraad, P.M.O., Lee, S., et al. (2014) Evaluating Techniques for Redirecting Turbine Wakes Using SOWFA. Renewable Energy, 70, 211-218. https://doi.org/10.1016/j.renene.2014.02.015
- 4. Fleming, P., Gebraad, P., van Wingerden, J.W., et al. (2013) The SOWFA Super-Controller: A High-Fidelity Tool for Evaluating Wind Plant Control Approaches. Proceedings of the EWEA Annual Meeting, Vienna.
- 5. Gebraad, P.M.O., Teeuwisse, F.W., Wingerden, J.W., et al. (2016) Wind Plant Power Optimization through Yaw Control Using a Parametric Model for wake Effects—A CFD Simulation Study. Wind Energy, 19, 95-114. https://doi.org/10.1002/we.1822
- 6. Gebraad, P.M.O. (2014) Data-Driven Wind Plant Control. Delft University of Technolo-gy.
- 7. Miao, W., Li, C., Yang, J., et al. (2016) Numerical Investigation of the Yawed Wake and Its Effects on the Downstream Wind Turbine. Journal of Renewable and Sustainable Energy, 8, 33-39. https://doi.org/10.1063/1.4953791