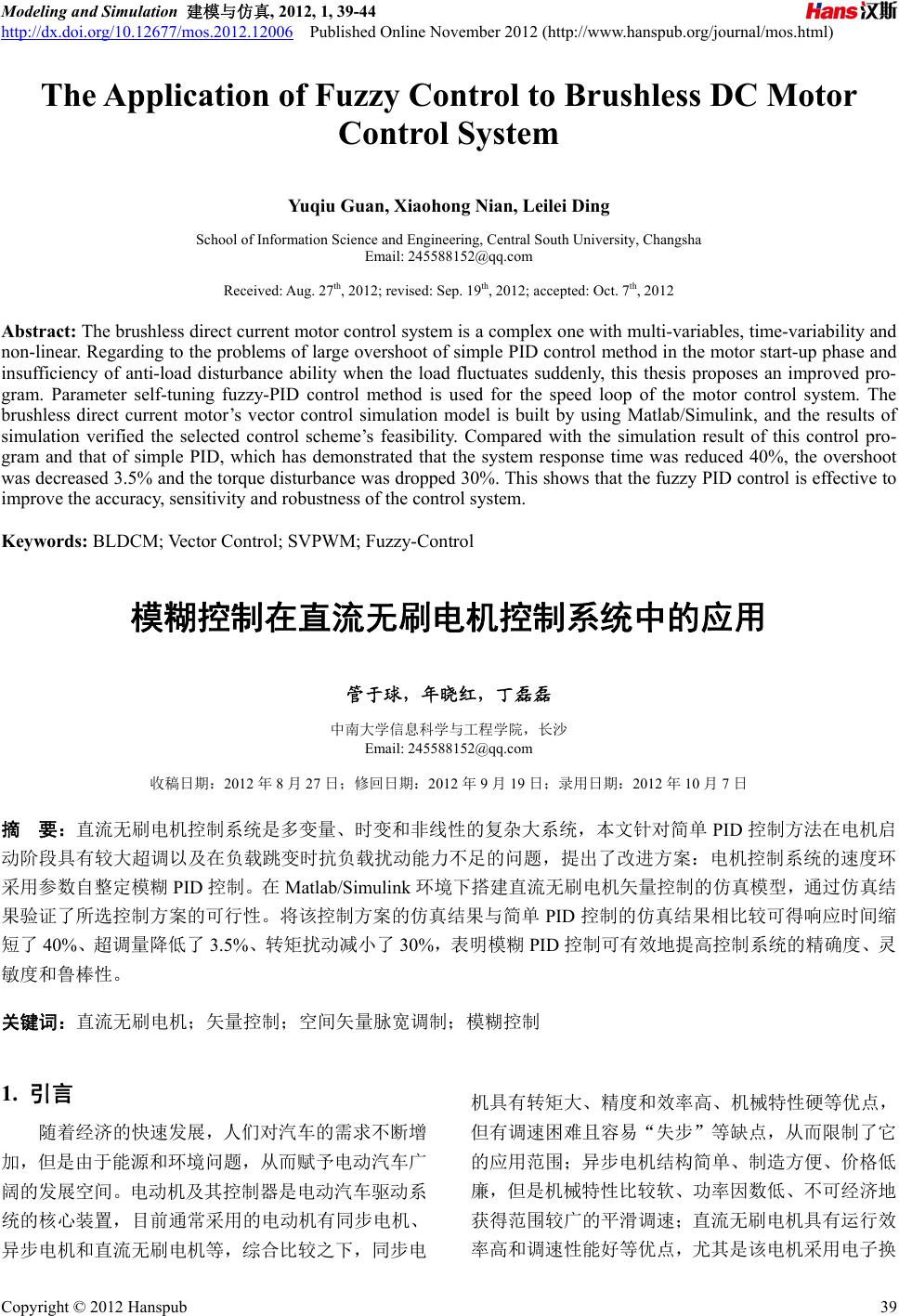
 Modeling and Simulation 建模与仿真, 2012, 1, 39-44 http://dx.doi.org/10.12677/mos.2012.12006 Published Online November 2012 (http://www.hanspub.org/journal/mos.html) The Application of Fuzzy Control to Brushless DC Motor Control System Yuqiu Guan, Xiaohong Nian, Leilei Ding School of Information Science and Engineering, Central South University, Changsha Email: 245588152@qq.com Received: Aug. 27th, 2012; revised: Sep. 19th, 2012; accepted: Oct. 7th, 2012 Abstract: The brushless direct current motor control system is a complex one with multi-variables, time-variability and non-linear. Regarding to the problems of large overshoot of simple PID control method in the motor start-up phase and insufficiency of anti-load disturbance ability when the load fluctuates suddenly, this thesis proposes an improved pro- gram. Parameter self-tuning fuzzy-PID control method is used for the speed loop of the motor control system. The brushless direct current motor’s vector control simulation model is built by using Matlab/Simulink, and the results of simulation verified the selected control scheme’s feasibility. Compared with the simulation result of this control pro- gram and that of simple PID, which has demonstrated that the system response time was reduced 40%, the overshoot was decreased 3.5% and the torque disturbance was dropped 30%. This shows that the fuzzy PID control is effective to improve the accuracy, sensitivity and robustness of the control system. Keywords: BLDCM; Vector Control; SVPWM; Fuzzy-Control 模糊控制在直流无刷电机控制系统中的应用 管于球,年晓红,丁磊磊 中南大学信息科学与工程学院,长沙 Email: 245588152@qq.com 收稿日期:2012 年8月27 日;修回日期:2012年9月19日;录用日期:2012 年10 月7日 摘 要:直流无刷电机控制系统是多变量、时变和非线性的复杂大系统,本文针对简单 PID控制方法在电机启 动阶段具有较大超调以及在负载跳变时抗负载扰动能力不足的问题,提出了改进方案:电机控制系统的速度环 采用参数自整定模糊 PID控制。在 Matlab/Simulink 环境下搭建直流无刷电机矢量控制的仿真模型,通过仿真结 果验证了所选控制方案的可行性。将该控制方案的仿真结果与简单 PID 控制的仿真结果相比较可得响应时间缩 短了 40%、超调量降低了 3.5%、转矩扰动减小了30 %,表明模糊 PID控制可有效地提高控制系统的精确度、灵 敏度和鲁棒性。 关键词:直流无刷电机;矢量控制;空间矢量脉宽调制;模糊控制 1. 引言 随着经济的快速发展,人们对汽车的需求不断增 加,但是由于能源和环境问题,从而赋予电动汽车广 阔的发展空间。电动机及其控制器是电动汽车驱动系 统的核心装置,目前通常采用的电动机有同步电机、 异步电机和直流无刷电机等,综合比较之下,同步电 机具有转矩大、精度和效率高、机械特性硬等优点, 但有调速困难且容易“失步”等缺点,从而限制了它 的应用范围;异步电机结构简单、制造方便、价格低 廉,但是机械特性比较软、功率因数低、不可经济地 获得范围较广的平滑调速;直流无刷电机具有运行效 率高和调速性能好等优点,尤其是该电机采用电子换 Copyright © 2012 Hanspub 39  模糊控制在直流无刷电机控制系统中的应用 相更是解决了传统直流电机机械换相的缺点,维修方 便。很好地满足了电动汽车对电动机应具有较硬的机 械特性、较强的过载能力,同时还必须具有较宽的调 速范围,能在较恶劣的环境下长期工作的要求。 本文分析了直流无刷电机的数学模型,由于直流 无刷电机控制系统是多变量、时变和非线性的复杂大 系统,简单PID 控制方法在电机启动阶段具有较大速 度超调以及在负载跳变时抗负载扰动能力存在严重 不足,因此本文提出将电机控制系统的速度环采用参 数自整定模糊PID 控制,在 Matlab/Simulink 环境下搭 建直流无刷电机的控制仿真模型,通过仿真结果验证 了所选控制方案的可行性。将该控制方案的仿真结果 与简单 PID 控制的仿真结果相比较,表明模糊 PID 控 制在抗负载扰动能力和降低启动转速超调方面具有 明显的优越性,有效地满足了用户对电动汽车控制系 统高性能的要求,具有重要的实际应用性[1,2]。 2. BLDCM 的数学模型 直流无刷电动机采用永磁材料制作转子,定子的 三相绕组在空间上互差120˚。直流无刷电动机具有各 相反电动势为梯形波的特征,这就意味着定子与转子 之间的互感是非正弦的,从而使得直流无刷电机的气 隙磁场、电流以及反电动势都是非正弦的,因此采用 直–交轴坐标变换已经不是有效的分析和控制方法。 直接利用电动机本身的相变量来建立直流无刷电机 的数学模型,这种方法既简单又具有较高的准确度。 为了简化分析,通常做如下假设: 1) 忽略电机铁芯饱和,不计涡流和磁滞损耗; 2) 不计电枢反应,气隙磁场分布近似认为是平顶 宽度为 120˚电角度的梯形波; 3) 忽略齿槽效应,电枢导体连续均匀分布在电枢 表面; 4) 驱动系统逆变电路的功率管和续流二极管均 具有理想的开关特性[2,3]。 可得三相绕组的电压平衡方程为: a00 00 00 aa bb b cc c ui i rLMM uriMLMPi rMML ui i a b c e e e (1) 公式(1)中, 、 、 是定子相绕组电流(A); 、 、 是定子三相绕组电压; 、 、 是定子相绕组 电动势(V);M是每两相绕组间的互感(H);L是每相 绕组的自感(H);P是微分算子且 a ib ic ia ub u c ua eb ec e dPdt。 由于定子三相绕组为三相星形连接并且连接结 构没有中线,则有 0 abc iii 0 ,即 abc MiMi Mi ,其中电机的等效电路如图 1所 示,由此上面的电压平衡方程可以变为: a000 0 00 00 000 0 a bb cc ui rLM uri LM rL ui M (2) 将上式利用状态方程进行表示,可写为: a 100 00 1 0000 00 1 00 aaa bb cc LM iu r Piuri e LM r iu LM bb cc ie ie (3) 电机在通电的情况下,它的所有带电导体所处的 磁场是相同的,因此,各相绕组所带有的感应电动势 也是相同的,都为: 30 m m PN E m n (4) 式中, 为极对数;N为总导体数; m Pm 为主磁通;n 为电机转速。 由于所用的直流无刷电机是Y型连接的,由电机 原理可得该电机的感应电动势 E是单相绕组上的两 倍,即: 215 m dm m PN EE n 由此可得电磁转矩的表达式为: 24 π md m dm EI PN TI n d (5) 式中的 d I 为方波驱动信号电流的幅值; 2π 60 n 。 Copyright © 2012 Hanspub 40 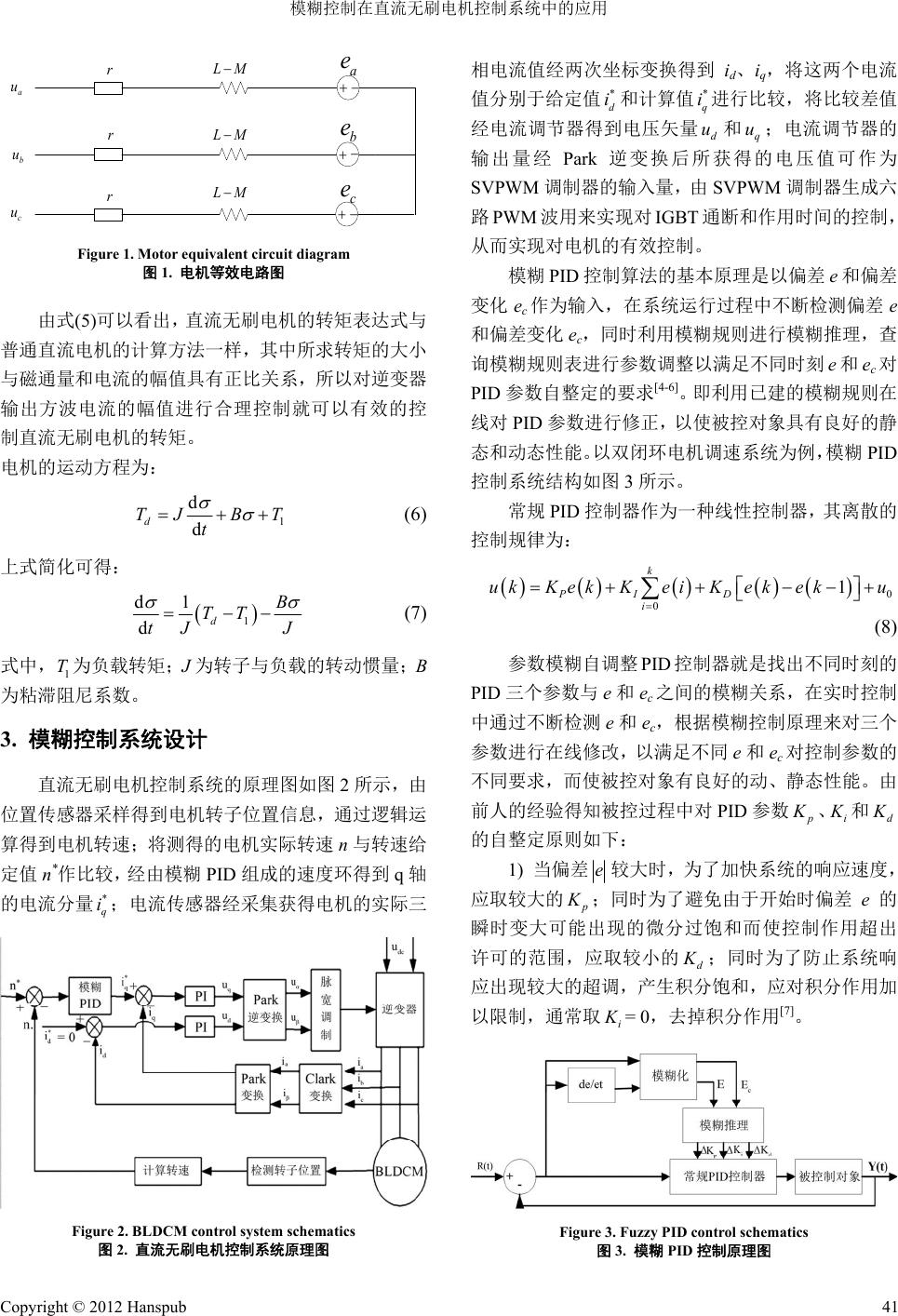 模糊控制在直流无刷电机控制系统中的应用 b u a u c u r r r LM LM LM a e b e c e Figure 1. Motor equivalent circuit diagram 图1. 电机等效电路图 由式(5)可以看出,直流无刷电机的转矩表达式与 普通直流电机的计算方法一样,其中所求转矩的大小 与磁通量和电流的幅值具有正比关系,所以对逆变器 输出方波电流的幅值进行合理控制就可以有效的控 制直流无刷电机的转矩。 电机的运动方程为: 1 d d d TJ BT t (6) 上式简化可得: 1 d1 dd B TT tJ J (7) 式中, 为负载转矩;J为转子与负载的转动惯量;B 为粘滞阻尼系数。 1 T 3. 模糊控制系统设计 直流无刷电机控制系统的原理图如图 2所示,由 位置传感器采样得到电机转子位置信息,通过逻辑运 算得到电机转速;将测得的电机实际转速 n与转速给 定值 n*作比较,经由模糊 PID组成的速度环得到 q轴 的电流分量 ;电流传感器经采集获得电机的实际三 * q i Figure 2. BLDCM control system schematics 图2. 直流无刷电机控制系统原理图 相电流值经两次坐标变换得到 id、iq,将这两个电流 值分别于给定值和计算值 进行比较,将比较差值 经电流调节器得到电压矢量 和;电流调节器的 输出量经 Park 逆变换后所获得的电压值可作为 SVPWM 调制器的输入量,由 SVPWM 调制器生成六 路PWM波用来实现对 IGBT 通断和作用时间的控制, 从而实现对电机的有效控制。 * d i* q i d uq u 模糊 PID 控制算法的基本原理是以偏差 e和偏差 变化 ec作为输入,在系统运行过程中不断检测偏差 e 和偏差变化ec,同时利用模糊规则进行模糊推理,查 询模糊规则表进行参数调整以满足不同时刻 e和ec对 PID 参数自整定的要求[4-6]。即利用已建的模糊规则在 线对 PID参数进行修正,以使被控对象具有良好的静 态和动态性能。以双闭环电机调速系统为例,模糊PID 控制系统结构如图 3所示。 常规 PID控制器作为一种线性控制器,其离散的 控制规律为: 0 0 1 k PI D i ukKekKeiK ekeku (8) 参数模糊自调整 PID控制器就是找出不同时刻的 PID 三个参数与 e和ec之间的模糊关系,在实时控制 中通过不断检测e和ec,根据模糊控制原理来对三个 参数进行在线修改,以满足不同 e和ec对控制参数的 不同要求,而使被控对象有良好的动、静态性能。由 前人的经验得知被控过程中对PID 参数 p K 、i K 和d K 的自整定原则如下: 1) 当偏差 e较大时,为了加快系统的响应速度, 应取较大的 p K ;同时为了避免由于开始时偏差e的 瞬时变大可能出现的微分过饱和而使控制作用超出 许可的范围,应取较小的 d K ;同时为了防止系统响 应出现较大的超调,产生积分饱和,应对积分作用加 以限制,通常取 i K = 0,去掉积分作用[7]。 Figure 3. Fuzzy PID control schematics 图3. 模糊 PID 控制原理图 Copyright © 2012 Hanspub 41 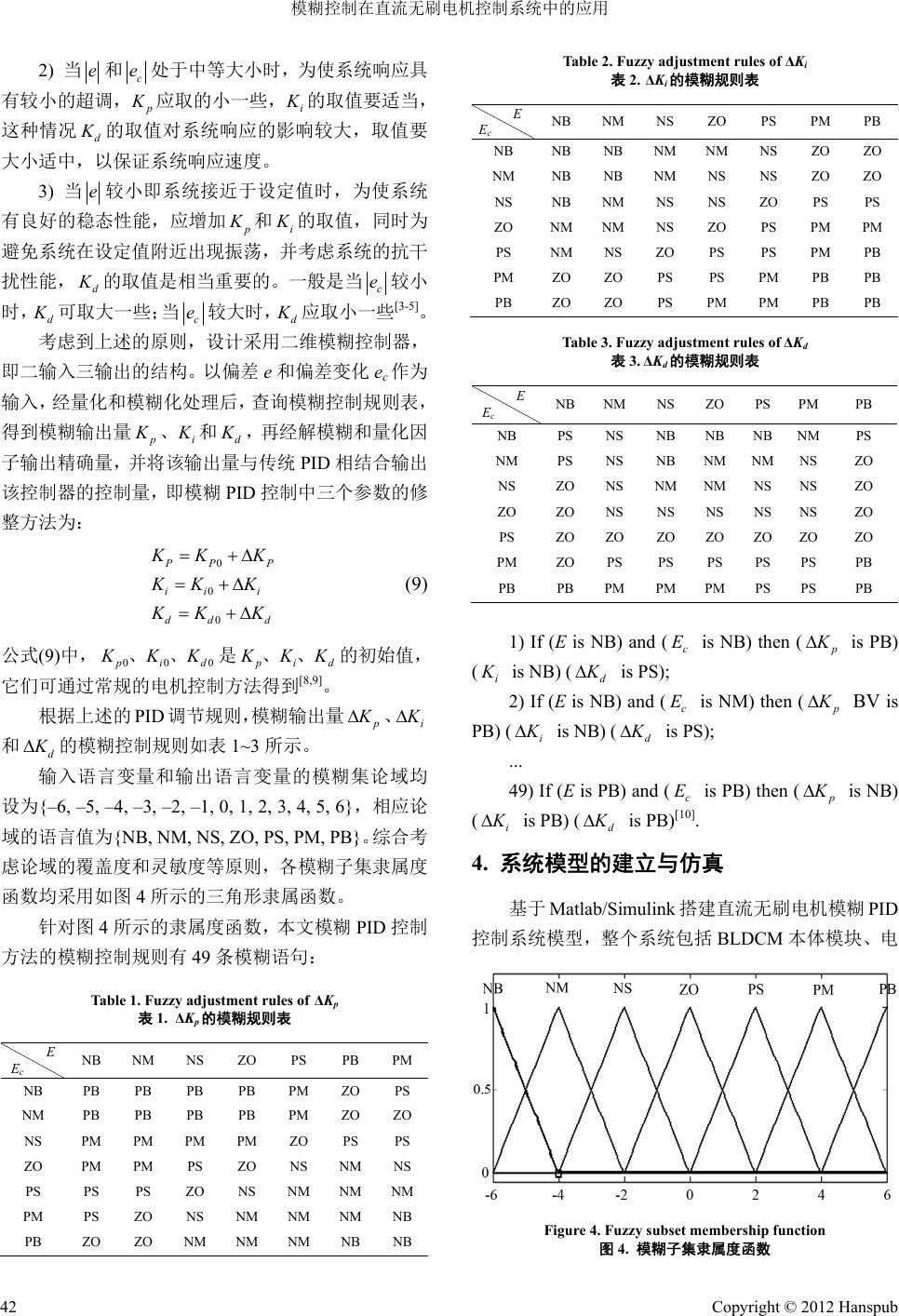 模糊控制在直流无刷电机控制系统中的应用 2) 当e和c e处于中等大小时,为使系统响应具 有较小的超调, p K 应取的小一些, i K 的取值要适当, 这种情况 d K 的取值对系统响应的影响较大,取值要 大小适中,以保证系统响应速度。 3) 当e较小即系统接近于设定值时,为使系统 有良好的稳态性能,应增加 p K 和i K 的取值,同时为 避免系统在设定值附近出现振荡,并考虑系统的抗干 扰性能, d K 的取值是相当重要的。一般是当 c e较小 时, d K 可取大一些;当 c e较大时, d K 应取小一些[3-5]。 考虑到上述的原则,设计采用二维模糊控制器, 即二输入三输出的结构。以偏差 e和偏差变化ec作为 输入,经量化和模糊化处理后,查询模糊控制规则表, 得到模糊输出量 p K 、i K 和d K ,再经解模糊和量化因 子输出精确量,并将该输出量与传统PID 相结合输出 该控制器的控制量,即模糊 PID控制中三个参数的修 整方法为: 0 0 0 P PP ii i dd d K KK K KK K KK (9) 公式(9)中, 00 0 p id K KK、、 是 p id K KK、、的初始值, 它们可通过常规的电机控制方法得到[8,9]。 根据上述的 PID调节规则,模糊输出量 p K 、i K 和d K 的模糊控制规则如表1~3 所示。 输入语言变量和输出语言变量的模糊集论域均 设为{–6, –5, –4, –3, –2, –1, 0, 1, 2, 3, 4, 5, 6},相应论 域的语言值为{NB, NM, NS, ZO, PS, PM, PB}。综合考 虑论域的覆盖度和灵敏度等原则,各模糊子集隶属度 函数均采用如图 4所示的三角形隶属函数。 针对图 4所示的隶属度函数,本文模糊PID 控制 方法的模糊控制规则有49 条模糊语句: Table 1. Fuzzy adjustment rules of ΔKp 表1. ΔKp的模糊规则表 E Ec NB NM NS ZO PS PB PM NB PB PB PB PB PM ZO PS NM PB PB PB PB PM ZO ZO NS PM PM PM PM ZO PS PS ZO PM PM PS ZO NS NM NS PS PS PS ZO NS NM NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB Table 2. Fuzzy adjustment rules of ΔKi 表2. ΔKi的模糊规则表 E Ec NB NM NS ZO PS PM PB NB NB NB NM NM NS ZO ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB ZO ZO PS PM PM PB PB Table 3. Fuzzy adjustment rules of ΔKd 表3. ΔKd的模糊规则表 E Ec NB NM NS ZO PS PMPB NB PS NS NB NB NB NMPS NM PS NS NB NM NM NSZO NS ZO NS NM NM NS NSZO ZO ZO NS NS NS NS NSZO PS ZO ZO ZO ZO ZO ZOZO PM ZO PS PS PS PS PSPB PB PB PM PM PM PS PSPB 1) If (E is NB) and (E is NB) then ( c p K is PB) (i K is NB) (d K is PS); 2) If (E is NB) and ( is NM) then ( c E p K BV is PB) (i K is NB) (d K is PS); ... 49) If (E is PB) and ( is PB) then ( c E p K is NB) (i K is PB) (d K is PB)[10]. 4. 系统模型的建立与仿真 基于 Matlab/Simulink 搭建直流无刷电机模糊 PID 控制系统模型,整个系统包括 BLDCM 本体模块、电 Figure 4. Fuzzy subset membership function 图4. 模糊子集隶属度函数 Copyright © 2012 Hanspub 42 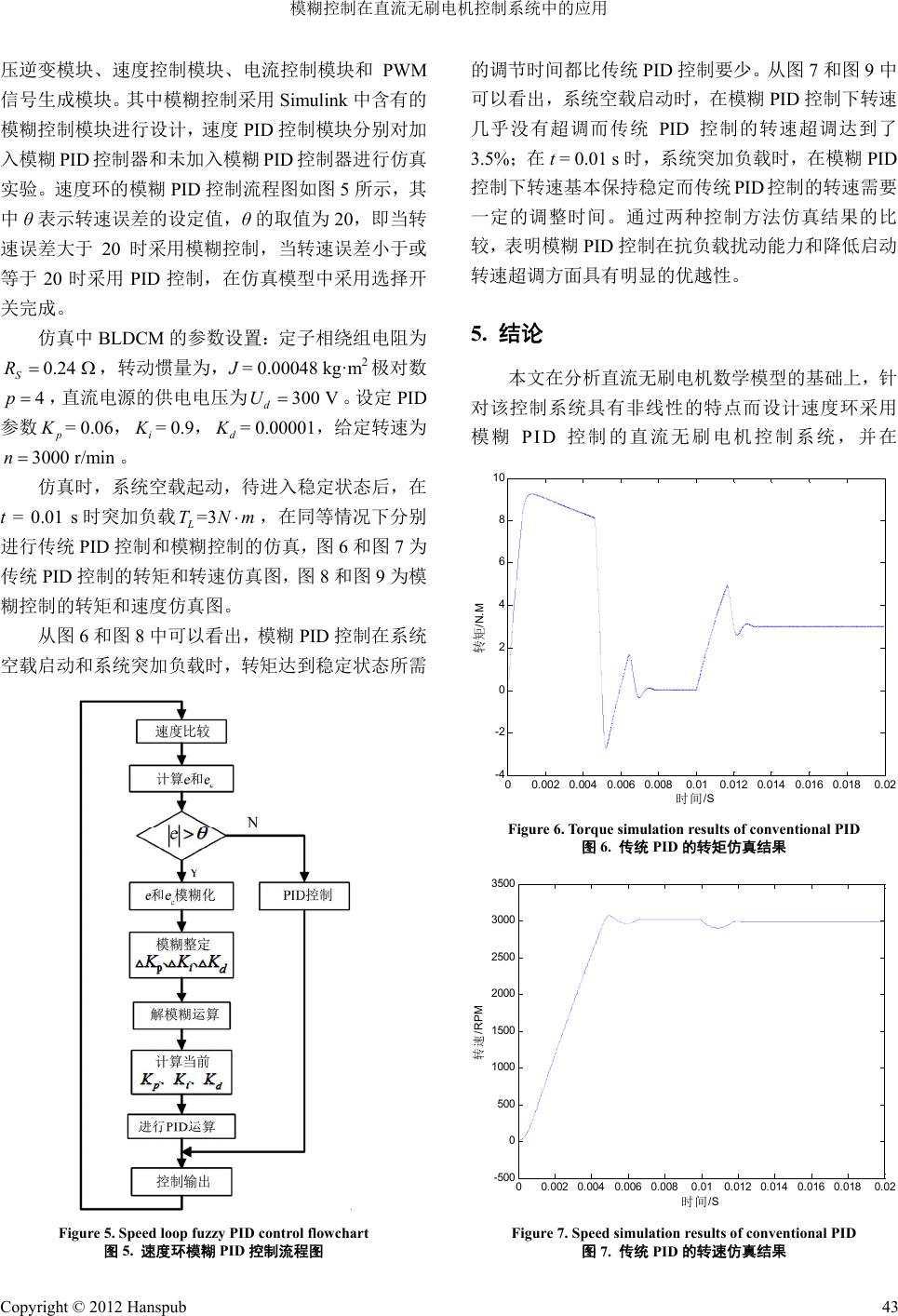 模糊控制在直流无刷电机控制系统中的应用 压逆变模块、速度控制模块、电流控制模块和 PWM 信号生成模块。其中模糊控制采用 Simulink 中含有的 模糊控制模块进行设计,速度PID 控制模块分别对加 入模糊 PID 控制器和未加入模糊 PID 控制器进行仿真 实验。速度环的模糊 PID 控制流程图如图 5所示,其 中θ表示转速误差的设定值,θ的取值为 20,即当转 速误差大于 20 时采用模糊控制,当转速误差小于或 等于 20 时采用 PID 控制,在仿真模型中采用选择开 关完成。 仿真中 BLDCM 的参数设置:定子相绕组电阻为 ,转动惯量为,J = 0.00048 kg·m2极对数 ,直流电源的供电电压为。设定PI D 参数 0.24 S R 4p 300 V d U p K = 0.06,i K = 0.9,d K = 0.00001,给定转速为 。 3000 r/minn 仿真时,系统空载起动,待进入稳定状态后,在 t = 0.01 s时突加负载 =3 L TNm ,在同等情况下分别 进行传统PID 控制和模糊控制的仿真,图 6和图 7为 传统 PID控制的转矩和转速仿真图,图 8和图 9为模 糊控制的转矩和速度仿真图。 从图 6和图 8中可以看出,模糊PID 控制在系统 空载启动和系统突加负载时,转矩达到稳定状态所需 Figure 5. Speed loop fuzzy PID control flowchart 图5. 速度环模糊 PID 控制流程图 的调节时间都比传统 PID控制要少。从图 7和图 9中 可以看出,系统空载启动时,在模糊 PID 控制下转速 几乎没有超调而传统 PID 控制的转速超调达到了 3.5%;在t = 0.01 s 时,系统突加负载时,在模糊 PID 控制下转速基本保持稳定而传统PID控制的转速需要 一定的调整时间。通过两种控制方法仿真结果的比 较,表明模糊 PID 控制在抗负载扰动能力和降低启动 转速超调方面具有明显的优越性。 5. 结论 本文在分析直流无刷电机数学模型的基础上,针 对该控制系统具有非线性的特点而设计速度环采用 模糊 PID 控制的直流无刷电机控制系统,并在 00.002 0.004 0.006 0.0080.010.012 0.0140.016 0.018 0.02 -4 -2 0 2 4 6 8 10 转矩 /N.M 时间 /S Figure 6. Torque simulation results of conventional PID 图6. 传统 PID 的转矩仿真结果 00.002 0.0040.006 0.0080.010.012 0.0140.016 0.0180.02 -500 0 500 1000 1500 2000 2500 3000 3500 转速 /RPM 时间 /S Figure 7. Speed simulation results of conventional PID 图7. 传统 PID 的转速仿真结果 Copyright © 2012 Hanspub 43 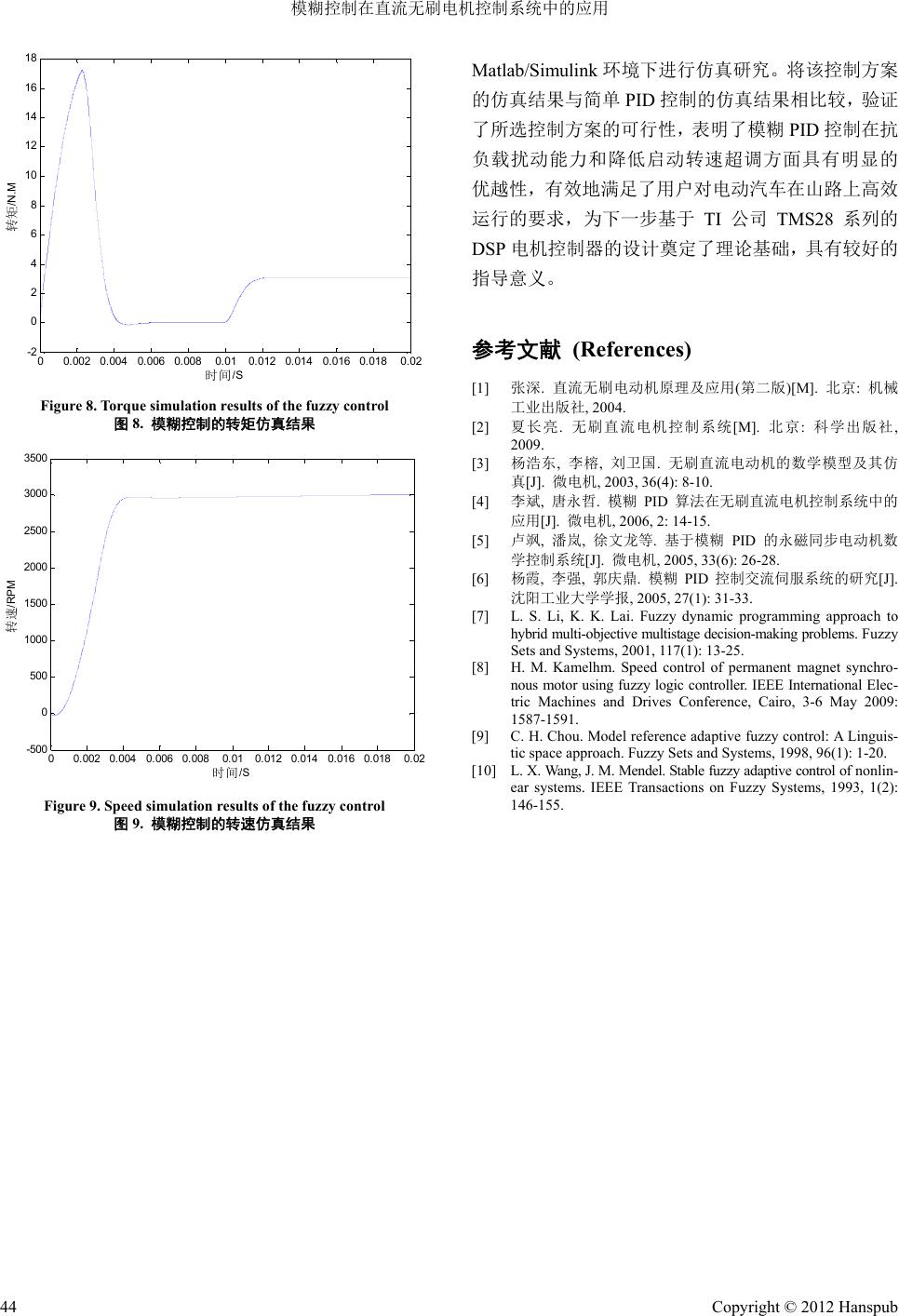 模糊控制在直流无刷电机控制系统中的应用 Copyright © 2012 Hanspub 44 00.002 0.004 0.006 0.0080.010.012 0.014 0.016 0.018 0.02 -2 0 2 4 6 8 10 12 14 16 18 转矩 /N.M 时间 /S Matlab/Simulink 环境下进行仿真研究。将该控制方案 的仿真结果与简单PID 控制的仿真结果相比较,验证 了所选控制方案的可行性,表明了模糊PID 控制在抗 负载扰动能力和降低启动转速超调方面具有明显的 优越性,有效地满足了用户对电动汽车在山路上高效 运行的要求,为下一步基于TI公司 TMS28 系列的 DSP 电机控制器的设计奠定了理论基础,具有较好的 指导意义。 参考文献 (References) [1] 张深. 直流无刷电动机原理及应用(第二版)[M]. 北京: 机械 工业出版社, 2004. Figure 8. Torque simulation results of the fuzzy control 图8. 模糊控制的转矩仿真结果 [2] 夏长亮. 无刷直流电机控制系统[M]. 北京: 科学出版社, 2009. 00.002 0.0040.006 0.008 0.01 0.012 0.0140.016 0.0180.02 -500 0 500 1000 1500 2000 2500 3000 3500 转速 /RPM 时间 /S [3] 杨浩东, 李榕, 刘卫国. 无刷直流电动机的数学模型及其仿 真[J]. 微电机, 2003, 36(4): 8-10. [4] 李斌, 唐永哲. 模糊 PID 算法在无刷直流电机控制系统中的 应用[J]. 微电机, 2006, 2: 14-15. [5] 卢飒, 潘岚, 徐文龙等. 基于模糊 PID 的永磁同步电动机数 学控制系统[J]. 微电机, 2005, 33(6): 26-28. [6] 杨霞, 李强, 郭庆鼎. 模糊 PID 控制交流伺服系统的研究[J]. 沈阳工业大学学报, 2005, 27(1): 31-33. [7] L. S. Li, K. K. Lai. Fuzzy dynamic programming approach to hybrid multi-objective multistage decision-making problems. Fuzzy Sets and Systems, 2001, 117(1): 13-25. [8] H. M. Kamelhm. Speed control of permanent magnet synchro- nous motor using fuzzy logic controller. IEEE International Elec- tric Machines and Drives Conference, Cairo, 3-6 May 2009: 1587-1591. [9] C. H. Chou. Model reference adaptive fuzzy control: A Linguis- tic space approach. Fuzzy Sets and Systems, 1998, 96(1): 1-20. [10] L. X. Wang, J. M. Mendel. Stable fuzzy adaptive control of nonlin- ear systems. IEEE Transactions on Fuzzy Systems, 1993, 1(2): 146-155. Figure 9. Speed simulation results of the fuzzy control 图9. 模糊控制的转速仿真结果 |