Modeling and Simulation
Vol.
13
No.
03
(
2024
), Article ID:
87523
,
8
pages
10.12677/mos.2024.133252
基于电动轮椅的越障附加机构 设计与仿真分析
康浩伦1,2,3,孟巧玲1,2,3*,喻洪流1,2,3
1上海理工大学康复工程与技术研究所,上海
2上海康复器械工程技术研究中心,上海
3民政部神经功能信息与康复工程重点实验室,上海
收稿日期:2024年4月29日;录用日期:2024年5月21日;发布日期:2024年5月28日

摘要
随着出生率的持续走低,我国未来使用电动轮椅辅助行动的群体基数越来越大。本文为提高电动轮椅面对复杂地形的适应能力,设计了一种基于电动轮椅的越障附加机构。基于准静态模型,分析了电动轮椅的越障过程,并提出了越障附加机构的设计方法。对附加机构进行结构设计后,通过ADAMS的运动仿真验证了该设计的可行性,并对300 mm × 100 mm × 3的台阶进行了越障测试。实验结果表明所设计的越障附加机构可以显著的提升电动轮椅的越障能力。
关键词
准静态分析,机械结构设计,ADAMS,运动仿真

Design and Simulation Analysis of Obstacle-Crossing Add-On Mechanism Based on Electric Wheelchair
Haolun Kang1,2,3, Qiaoling Meng1,2,3*, Hongliu Yu1,2,3
1Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology, Shanghai
2Shanghai Engineering Research Center of Assistive Devices, Shanghai
3Key Laboratory of Neurofunctional Information and Rehabilitation Engineering, Ministry of Civil Affairs, Shanghai
Received: Apr. 29th, 2024; accepted: May. 21st, 2024; published: May. 28th, 2024

ABSTRACT
As the birth rate continues to fall, the number of people using power wheelchairs will grow in our country’s future. In this paper, an obstacle-crossing add-on mechanism based on an electric wheelchair is designed to improve the capability to complex terrain. At first, the obstacle-crossing process of the electric wheelchair is analyzed via the quasi-static model, and the design method of the obstacle-crossing add-on mechanism is proposed. Then the feasibility of the design was verified by motion simulation in ADAMS after the structural design of the mechanism. Then the obstacle-crossing experiment was performed on a 300mm × 100mm × 3 step. The experimental results show that the designed mechanism can significantly improve the obstacle-crossing capability of the electric wheelchair.
Keywords:Quasi-Static Analysis, Mechanical Structure Design, ADAMS, Motion Simulation

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
据联合国《2023年世界社会报告》显示:截至21世纪中叶,全球65岁及以上的人口数量将增加一倍以上 [1] ,世界人口老龄化现象日益严峻,已是当今时代鲜明的全球趋势所在。下肢移动功能障碍作为老年人所面临的常见问题之一,已严重影响其生活质量,因此人们对辅助提升移动能力的机器的需求变得愈发强烈 [2] [3] [4] 。轮椅 [5] [6] 和助行器 [7] [8] 等轮式辅助器具已被广泛用于下肢功能障碍患者的日常生活当中,而可折叠的电动轮椅因其优异的便携性与移动性逐渐成为解决老龄化问题的最佳解决方案。
但轮式辅助器具的越障能力实为有限 [9] [10] [11] ,往往只能在没有任何障碍与凹陷的理想路面下使用。然而在实际日常出行的情况下,难免会遇到诸如台阶,不平路面,坑陷此类障碍,如若用电动轮椅强行跨越,极易造成机体失衡而摔倒,对用户造成不可逆的伤害。鉴于此类问题,为适应各类地形的全地形轮椅被研发出来,根据越障机构的类别可区分为:轮足式 [12] 、轮履式 [13] 、变轮径式 [14] [15] 。和歌山大学设计的RT-Mover全地形轮椅 [16] 便是典型的轮足式轮椅,其每个车轮具备独立的光电传感器用于检测障碍物,并通过与车轮铰接的摆臂进行交替的仿生步态运动,从而完成越障。其控制算法过于复杂,维修成本较高,并不适用于日常出行。卢布尔雅那大学设计的Avalanche轮椅 [17] 共设有14个驱动器,除了底盘模块的轮毂电机及转向电机,每条橡胶履带也是由独立电机驱动,并且由改良切比雪夫连杆机构连接于底盘。但其整体体积较为庞大笨重,能耗较高,如若应用于日常生活,同时会对路面造成一定损坏。丰田公司设计的iBOT轮椅 [18] 于前后两个车轮间设有转轴,当面对障碍物时,转轴驱动每个轮子交替与颠簸路面接触,使轮椅完成越障。相比前两类机构,变轮径式的越障机构,主要依靠可变轮径的越障轮来辅助轮椅本体跨越障碍,具备装配简单,控制容易,成本低廉等特点,更适合于日常出行。同时,将越障机构集成于轮椅本体形成一体化结构,使轮椅变得过于笨重,反而违背了其便携性与移动性的设计初衷。而将模块化的越障辅助装置 [19] [20] ,作为附加机构装配于现有的个人移动辅助器具中反而是一种更好的选择。
因此,本文设计了一种基于电动轮椅的越障附加机构,利用可重构的轮腿机构作为附加模块铰接于轮椅本体,来解决电动轮椅的越障能力不足问题,满足用户的日常出行需求。基于准静态模型分析了电动轮椅的越障条件,并提出了越障附加机构的设计方法,最后通过仿真实验验证了附加机构对越障性能的提升效果。
2. 电动轮椅越障分析
为了深入探讨电动轮椅的越障能力,首先必须对其在日常环境中可能遇到的障碍进行细化分类。这些障碍包括但不限于台阶、坑洼、斜坡等,每种障碍都对电动轮椅的设计和功能提出了特定的要求。目前,市面上常见的电动轮椅都具备一定的驻坡能力与对坑洼路面的适应能力,但对台阶类地形的跨越能力实为有限。作为城市环境中最常见的障碍,台阶已成为电动轮椅日常出行中的最大挑战。
由于电动轮椅在越障过程中受到自身车轮半径尺寸所约束,只能通过小于车轮半径的障碍,即自身可跨越的最大高度为:
(1)
式中,h为台阶障碍物的高度,R为车轮半径,α为车轮轴心与障碍物边缘的连线与障碍物平面间的夹角。
对于高度超出车轮半径的障碍物,往往需要借助外部辅助才能安全通过。因此,为了进一步研究车体与障碍物之间的交互作用,本文基于准静态模型对电动轮椅在外部辅助下的越障行为展开了的受力分析,如图1所示。该模型是建立在轮椅匀速越障的条件下,并且忽略惯性力的影响,仅考虑重力和支撑力等静力学因素对轮椅的作用。在此模型中,电动轮椅被简化为由几个关键部件构成的刚体系统,主要包括车轮和车架。台阶被视为固定障碍物,其表面与车轮之间的接触被假设为无滑动摩擦接触。对于轮椅本体,存在以下力矩平衡方程:
(2)
式中, 为越障所需的抬升力矩, 。
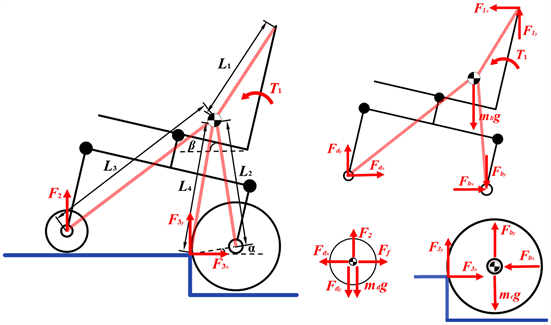
Figure 1. Force diagrams for quasi-static model
图1. 准静态模型的受力图
同时,根据图2各部件自由体受力图,可围绕各自质心建立以下力与力矩方程:
(3)
(4)
(5)
(6)
(7)
(8)
式中, 为辅助抬升力, 为台阶的反作用力。

Figure 2. Schematic representation of the FBDs used in the quasi-static analysis
图2. 准静态模型的自由体图
将公式(3)~(7)联立带入公式(8)中可得:
(9)
从该公式得知,轮椅的抬升力矩 受到 的角度所约束。在抬升的初期阶段,所需的力矩达到最大值;伴随轮椅的逐步抬升,轴心夹角 随之增大,而所需的抬升力矩逐渐减小。此外,前轮法向力 的大小也是影响越障结果的直接因素。针对上述问题,本文提出了一种创新的解决方案,即通过引入铰接式的轮腿机构间接增加轮径,以增大电动轮椅可越障的高度范围。另一方面,该设计不仅有效地改变了原有的力矩平衡关系,降低了越障过程中对前轮法向力的需求,同时具备足够的潜力以取缔他人辅助,而实现自主越障。
3. 越障附加机构结构设计
所设计的越障附加机构主要由四部分构成,分别是限位机构,离合机构,轮臂机构和储能机构,整体机构如图3所示。其中,限位机构置于离合机构的限位槽内,拔出后可调整轮腿机构间的角度。储能机构包括旋转阻尼元件和线性阻尼元件两部分,用于缓冲减震。

Figure 3. Exploded view of the obstacle-crossing add-on mechanism structure
图3. 越障附加机构结构分解图
旋转储能机构内部嵌固了用于装配的定位销,可将附加机构与轮椅本体进行组装配合,使两者构成铰接态,形成较为有效、合理的整体。整机的装配图如图4所示。

Figure 4. Assembly diagram of the obstacle-crossing add-on mechanism structure
图4. 越障附加机构结构装配图
4. 仿真实验验证
为确保所设计越障附加机构的适用性,对简化后的模型使用ADAMS软件对其越障过程进行了运动仿真。由于模型中零件数量相对较多,为了提高运行效率,将对运动结构无关或影响较小的结构件进行简化,减少模型的冗余参数,简化后的轮椅模型如图5所示。此外,针对关键构件添加约束关系、接触力、驱动力以及负载。采用冲击函数模型,且车轮与地面直接采用库仑摩擦,接触参数如表1所示。

Table 1. The contact parameters
表1. 接触参数

Figure 5. Simplified wheelchair model
图5. 简化后的轮椅模型图
首先,设置轮毂电机转速为3 rad/s,以匀速通过高度为300 mm × 100 mm × 3的台阶型障碍物,以验证附加机构对轮椅本体越障性能的提升效果,仿真结果如图6所示。
整个仿真过程耗时25s,图6中两条曲线分别对应了轮椅的质心速度与位移幅值;质心速度曲线上升处对应每个车轮正处于阶梯立面的攀爬过程,所对应的质心位移呈上升曲线态;而质心速度曲线激变处分别对应每个车轮爬越过阶梯边缘处,可以看到在该段时间所对应的质心位移处于平稳态,证明此时车体已成功爬越台阶边缘,处于该台阶平面处。越障过程的运动仿真如图7所示。
仿真结果表明,装配了附加机构电动轮椅在面对台阶形障碍物时,越障过程整体顺利且稳定,同时抓地能力也表现得较为优异,并未发生较大的颠簸与倾倒现象,实验结果表明,本文所提出的越障附加机构可以显著提升电动轮椅的越障能力。

Figure 6. Displacement and velocity curves of the obstacle-crossing simulation
图6. 越障仿真速度、位移曲线

Figure 7. Schematic diagram of simulated obstacle-crossing process
图7. 仿真越障过程的示意图
5. 结论
本研究提出并实现了一种旨在解决电动轮椅越障能力不足问题的附加机构,将准静态理论分析与运动仿真实验相结合,证明了该机构在提升电动轮椅越障性能方面的有效性与泛用性。本文的研究成果不仅为电动轮椅的设计与改进提供了新的思路,也为轮椅用户提供更为自主、便捷的移动解决方案,进一步增强其生活质量和社会参与度。
文章引用
康浩伦,孟巧玲,喻洪流. 基于电动轮椅的越障附加机构设计与仿真分析
Design and Simulation Analysis of Obstacle-Crossing Add-On Mechanism Based on Electric Wheelchair[J]. 建模与仿真, 2024, 13(03): 2781-2788. https://doi.org/10.12677/mos.2024.133252
参考文献
- 1. 陆杰华. 全球人口结构的变迁趋势及其经济社会影响[J]. 人民论坛, 2023(24): 30-34.
- 2. 宋巧玲. 面向老年护理的家用服务机器人研究现状[J]. 医疗卫生装备, 2023, 44(11): 100-106.https://doi.org/10.19745/j.1003-8868.2023237
- 3. 张树宽, 吴宇辉, 赵东辉, 等. 兼具安全性与柔顺性的步行康复训练机器人交互方法[J]. 机器人技术与应用, 2023(3): 23-31.
- 4. 嵇建成, 龚涛. 全向移动康复机器人设计与研究[J]. 工业控制计算机, 2023, 36(1): 1-3.
- 5. 朱花, 孙国林. 前进式爬梯轮椅的结构设计与运动稳定性研究[J]. 机械传动, 2023, 47(11): 154-160.https://doi.org/10.16578/j.issn.1004.2539.2023.11.023
- 6. 孔华萍, 张艺于, 黄韫喆, 等. 智能轮椅研究进展[J]. 科技创新与应用, 2023, 13(5): 45-50.https://doi.org/10.19981/j.CN23-1581/G3.2023.05.012
- 7. 王新, 鄢沛峰. 下肢穿戴式助行器步态规划与稳定性分析[J]. 机械传动, 2023, 47(12): 82-88.https://doi.org/10.16578/j.issn.1004.2539.2023.12.012
- 8. 王晓伟, 高胜鲁, 陈旭. 骑乘式下肢助行器结构与运动仿真研究[J/OL]. 机械科学与技术, 1-7.https://doi.org/10.13433/j.cnki.1003-8728.20220309, 2024-03-13.
- 9. 朱花, 葛海文. 轮履式爬楼梯轮椅及轮履切换动力学分析[J]. 机械传动, 2023, 47(12): 158-168.https://doi.org/10.16578/j.issn.1004.2539.2023.12.023
- 10. 郝振国, 曹东兴, 王强. 爬楼轮椅后腿机构的运动精度可靠性分析[J]. 机械工程师, 2020(6): 22-25 28.
- 11. 朱宇航, 费燕琼, 许红伟, 等. 轮-履-腿复合式移动机器人的越障分析[J]. 机械设计与研究, 2017, 33(4): 28-32.https://doi.org/10.13952/j.cnki.jofmdr.2017.0142
- 12. 冯长龙, 行志刚, 程军, 等. 仿生轮腿式爬梯底盘结构设计分析与应用[J]. 自动化与仪表, 2023, 38(7): 105-109. https://doi.org/10.19557/j.cnki.1001-9944.2023.07.023
- 13. 刘城, 王嘉轩, 刘建峰, 等. 地面机动平台可重构轮履复合推进机构研究现状与展望[J/OL]. 北京理工大学学报,1-12. https://doi.org/10.15918/j.tbit1001-0645.2023.167, 2024-02-29.
- 14. 王占礼, 赵德超, 陈延伟, 等. 曲柄星轮式爬楼梯轮椅爬升机构设计[J]. 长春工业大学学报(自然科学版), 2011, 32(2): 105-108. https://doi.org/10.15923/j.cnki.cn22-1382/t.2011.02.015
- 15. 章玮滨, 唐炜. 行星轮式爬楼梯轮椅的设计与分析[J]. 机械传动, 2019, 43(8): 103-106 115. https://doi.org/10.16578/j.issn.1004.2539.2019.08.019
- 16. Uustal, H. and Minkel, J.L. (2004) Study of the Independence IBOT 3000 Mobility System: An Innovative Power Mobility Device, during Use in Community Environments. Archives of Physical Medicine and Rehabilitation, 85, 2002-2010. https://doi.org/10.1016/j.apmr.2004.04.044
- 17. Nakajima, S. (2017) Evaluation of the Mobility Performance of a Personal Mobility Vehicle for Steps. IEEE Access, 5, 9748-9756. https://doi.org/10.1109/ACCESS.2017.2700323
- 18. Podobnik, J., Rejc, J., Slajpah, S., Munih, M. and Mihelj, M. (2017) All-Terrain Wheelchair: Increasing Personal Mobility with a Powered Wheel-Track Hybrid Wheelchair. IEEE Robotics & Automation Magazine, 24, 26-36. https://doi.org/10.1109/MRA.2017.2746182
- 19. 王建. 模块化嵌入式动力轮椅越障性能研究[D]: [硕士学位论文]. 青岛: 青岛理工大学, 2023. https://doi.org/10.27263/d.cnki.gqudc.2023.000300
- 20. Hosaka, T., Imamura, T. and Nagata, K. (2020) Development of the Support System for Wheelchair Use at Boarding and Alighting Trains. 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, 12-15 January 2020, 790-795. https://doi.org/10.1109/SII46433.2020.9025988
NOTES
*通讯作者。