Advances in Applied Mathematics
Vol.
11
No.
09
(
2022
), Article ID:
56333
,
12
pages
10.12677/AAM.2022.119720
具有时变时滞的不连续复杂网络固定与预定 时间同步
李兴瑞*,单美华,史东鑫
长安大学理学院,陕西 西安
收稿日期:2022年8月23日;录用日期:2022年9月20日;发布日期:2022年9月27日

摘要
本文研究了同时具有内部时变时滞和耦合时变时滞的不连续复杂网络的固定时间与预定时间同步问题。基于固定时间稳定性定理及其引理,设计了新的状态反馈控制器,实现了复杂网络的固定与预定时间同步。在Filippov微分包含框架下,通过应用Lyapunov-Krasovskii泛函方法和不等式分析方法,以线性矩阵不等式的形式得到了含有时滞的不连续复杂网络的固定时间与预定时间同步判定准则。最后用数值模拟验证了控制器的有效性与理论的正确性。
关键词
时变时滞,不连续激活函数,固定时间同步,预定时间同步

Fixed/Preassigned-Time Synchronization of Discontinuous Complex Networks with Time-Varying Delays
Xingrui Li*, Meihua Shan, Dongxin Shi
School of Science, Chang’an University, Xi’an Shaanxi
Received: Aug. 23rd, 2022; accepted: Sep. 20th, 2022; published: Sep. 27th, 2022

ABSTRACT
In this paper, we study the fixed-time and pre-assigned-time synchronization of discontinuous complex networks with both internal time-varying delays and coupled time-varying delays. Based on the fixed-time stability theorem and its lemma, a new state feedback controller is designed to realize the fixed and pre-assigned time synchronization of complex networks. Under the framework of Filippov differential inclusion, by using Lyapunov-Krasovskii functional method and inequality analysis method, the criterion of fixed time and pre-assigned time synchronization for discontinuous complex networks with time delay is obtained in the form of linear matrix inequalities. Finally, the effectiveness of the controller and the correctness of the theory are verified by numerical simulation.
Keywords:Time-Varying Delay, Discontinuous Activation Function, Fixed-Time Synchronization, Pre-Assigned-Time Synchronization

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,复杂网络受到了广泛的关注与研究。随着人工智能等技术的发展,复杂网络的同步在生物工程、信息处理、保密通信、模式识别等领域有着广泛的研究与应用 [1] [2] [3]。在之前的研究中,复杂网络的同步通常需要无限时间才能达到,因此近年来学者开始研究复杂网络有限时间同步问题 [4] [5]。有限时间同步的同步时间估计依赖系统的初始值,实际系统的初始值并不都是已知的。固定时间同步作为一种特殊的有限时间同步,其同步时间估计不依靠系统的初始值。预定时间同步指网络在预先指定的时间内实现同步,不依赖于控制器参数与系统的初始值。
在网络系统中,个组件之间的信息传输是通过通信信号进行的。由于信号传输的速度有限和交通拥堵,在网络系统中时间延迟是不可避免的。Rakkiyappan等人 [6] 通过使用牵制控制研究了具有概率时变延迟的Takagi-Sugeno模糊复杂网络的集群同步。Wu等人 [7] 研究了具有时变耦合延迟和不确定采样的复杂网络的采样数据指数同步。在实际中,复杂网络中的内部耦合和动态节点间都存在时间延迟,这使得复杂网络的同步分析更加复杂。因此研究具有内部和耦合时变延迟的复杂网络的同步是有意义且有挑战性的。近年来已经取得了具有时间延迟的复杂网络的固定时间同步研究结果。Chen等人 [8] 研究了混合耦合网络的固定时间同步,该网络在延迟耦合项中有内部延迟和一个传输延迟。Lü等人 [9] 设计了牵制控制器来实现具有不连续激活函数的耦合延迟神经网络的有限时间和固定时间同步,但其研究的耦合延迟神经网络在耦合项中没有延迟。Hu等人 [10] 通过定义向量符号函数来构造控制器,研究了具有内部和耦合时变延迟的复杂网络的固定时间同步,但其研究的复杂网络是连续的。而不连续现象在实际中普遍存在的,在处理许多复杂网络时不连续现象是不可忽略的。目前,同时具有内部和耦合时变时滞的不连续复杂网络固定时间同步目前还没有学者专门研究。
基于上述讨论,本文研究了具有内部和耦合时变时滞的不连续复杂网络的固定时间同步与预定时间同步。设计了状态反馈控制器实现目标网络的固定时间与预定时间同步,并使用数值模拟进行了验证。
2. 问题描述与预备知识
考虑以下具有N个节点的时滞复杂网络模型
(1)
其中
, 和
分别表示第i个节点的状态向量和控制输入,
和
均表示不连续矢量函数,
为常数矩阵,矩阵
是外部耦合矩阵,当节点i和节点
有连接时满足
;否则
,同时矩阵C的对角元素定义为
。
是内部
耦合矩阵,
和
分别代表内部时滞和耦合时滞,并且满足
且
。
本文旨在将网络(1)与以下孤立系统同步
(2)
其中
表示时间t的状态向量,方程中的其他参数定义与系统(1)相同。
定义1 同步误差记为
。如果存在与系统初始值无关的时间T,使得
且对于
有
。则称复杂网络(1)固定时间同步到系统(2)。如果时间T是预先给定的时间,与系统初始值和系统参数均无关且满足上述条件,则称复杂网络(1)在预定时间同步到系统(2)。
在本文中,激活函数
在
上是不连续的,因此误差系统是右边有不连续状态的一个微分方程,在这种情况下可能无法保证系统的解的存在性。因此以下我们将在Filippov解的意义下考虑。
考虑不连续系统
,其中
, 是不连续但局部可测的。
定义2 [11]
在
处的Filippov集值映射描述为
,其中
, 是集合
的Lebesgue测度。
定义3 [12] 函数
是系统
的Filippov解,如果
1)
在
中是绝对连续的;
2) 存在一个可测函数
,使得对几乎所有的
,有
,且对于几乎所有的
有
。
由于网络中存在不连续激活函数,给出以下两个重要假设条件:
假设1 对于
,除在可数个孤立点
外均连续,且其左右极限
和
存在,并且
在任意有界紧区间上至多存在有限个跳跃间断点。
假设2 对每一个
,存在非负常数
和
,使得对任意
满足
,其中
,,
。
引理1 若存在C-正则(正则、正定、径向无界)函数
满足
(3)
其中
,,,,,则不连续系统在固定时间内稳定,固定时间估计式如下:
1) 当
时,固定时间估计为:
,其中
。
2) 当
时,固定时间估计为:
。
证明:由文献 [13] 可知,当
时不连续系统在固定时间内同步达到稳定,且当
时,同步时间估计式为
,当
时,不妨设
,提出以下分段微分方程辅助证明:
(4)
比较式(3)与式(4)可以看出
,即当
收敛到0时,有
收敛到0。当
时,令
。由式(4)可知:当
时,
,即有:
(5)
当
时,令
。由式(4)也可知:当
时,
,同样有:
(6)
因此在式(4)的作用下,对于任意初值的系统(3)的固定时间估计转化为了系统(4)的解在时间
内趋向于1与
内趋向于0的和。
对于
, 趋向于1时,估计时间
。由
可知
,由式(5)能够推
出
。由
, 和
得出,存在时间
,
当
时,有
,,且
能够估计为:
(7)
从1趋向于0时,估计时间
。与上述论证相同有
。从
, 和
得出,存在时间
,满足
,且
能够表示为:
(8)
由式(7)和(8)能够得出,对于任意的初值
,在固定时间
内,有
,即有
。对于
有
成立,即有
成立。
当
的证明相同,上述论证可以说明满足
,当
时,不连续系统是固定时间稳定的,且其固定时间估计为
。证毕。
引理2 如果存在C-正则函数
和预先指定的时间
满足
,其中
,,,,,
,则称系统(1)在指定时间
内同步到系统(2)。
引理3 [14] 设
为非负常数,
,,则以下不等式成立
(9)
引理4 [15] 对于任意给定的向量
,标量
和任意
的实矩阵
有以下不等式成立
(10)
3. 网络的固定时间同步
本节研究复杂网络(1)与(2)的固定时间同步。网络(1)与(2)的同步问题将被转化为其误差系统的固定时间稳定性,利用引理1,通过构造Lyapunov-Krasovskii泛函和设计适当的控制器,得到了复杂为了网络(1)与(2)的固定时间同步的充分条件。本文设计控制器如下:
(11)
其中
。且有
,,,,
。
定理1 假设1和假设2成立,在控制器(11)下,如果存在正定对角矩阵
, 和标量
使得线性矩阵不等式
成立,且满足
,,则复杂网络(1)与(2)可以实现固定时间同步,且同步时间估计为:
。
线性矩阵不等式中I表示维度兼容的单位矩阵,
,,
,,
证明:根据定义2与定义3,网络(1)和(2)的解分别满足:
且
根据可测选择理论,存在可测函数
,,,, 满足
(12)
构造如下Lyapunov-Krasovskii泛函
(13)
根据同步误差动态方程(12)式可以得到:
(14)
由(12)式可得:
(15)
由假设2有
,。因此可将上式(15)写为:
(16)
由引理4可知
(17)
将上式(17)带入,式(14)可进一步表示为
由定理条件中线性矩阵不等式成立可知有
因此式(14)可以表示为:
(18)
由
, 可知:
(19)
且有
.
因此将以上各式带入式(18)可得:
由引理3可知
即有:
,满足引理1中条件的形式,因此复杂网络(1)与(2)可以实现固定时间同步,且根据引理1情况1)同步时间估计为
。证毕。
4. 网络的预定时间同步
本节研究复杂网络(1)与(2)的预定时间同步。预定时间同步的同步时间可根据实际需要预先指定,与系统初值与控制器参数无关,由此可见,预定时间同步的实际应用更加广泛。预定时间同步的研究较少,其理论还依赖于固定时间同步理论。为了实现网络(1)与(2)的预定时间同步本文设计了控制增益有限的状态反馈控制器如下:
(20)
其中T为定理1中所估计的时间,
为预先指定的时间。其余参数含义与控制器(11)中的参数相同。
定理2 假设1和假设2成立,在控制器(20)下,如果存在正定对角矩阵
和标量
使得线性矩阵不等式
成立,且满足
,。
则复杂网络(1)与(2)可以在预定时间
内实现同步。
证明:构造Lyapunov-Krasovskii泛函同式(13),与定理1证明相同的有:
由线性矩阵不等式成立条件可得
由引理3可得
即有
,满足引理2的条件,因此网络(1)与(2)将在预定是的
时间
内达到同步。证毕。
5. 数值模拟
本节我们通过数值模拟来验证控制器的有效性与理论的正确性。为了验证同步时间不受初值的影响,网络的初始值均为随机选取。考虑以下具有5个相同节点的网络,网络的每个节点是3维的,
(21)
其中
,,,,,,,,
,,
。
相应的目标同步系统可以描述为
(22)
如图2所示,在无控制器时,如图1所示,同步轨迹误差未收敛到0,网络(21)与目标系统(22)无法实现同步。
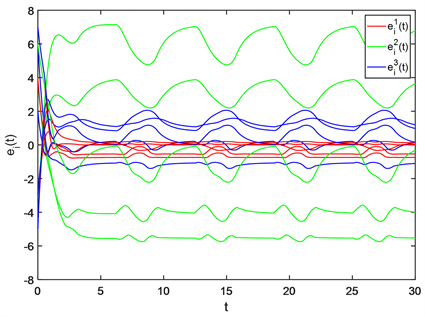
Figure 1. Errors of network (21) and (22) without controller
图1. 无控制器下网络(21)与(22)的误差
在控制器(11)下,选择参数
,,,,,,,。通过MATLAB LMI工具箱,求解出
。由假设可求出
,,,。
验证网络(23)与目标系统(22)的固定时间同步。如图2所示展示了在控制器(11)下,网络(21)与目标系统(22)的同步误差轨迹,从图中可以看出,网络(21)与目标系统在
时已经实现同步,小于定理1中所估计的固定时间
。验证了固定时间同步控制器的有效性及定理1的正确性。
接下来验证网络(21)与目标系统(22)的预定时间同步。选择同样的参数,在控制器(20)下,给定预定时间
,数值模拟结果如图3所示。可以看出,网络(21)与目标系统(22)在预定的时间
内达到同步,验证了定理2的正确性与预定时间同步控制器的有效性。
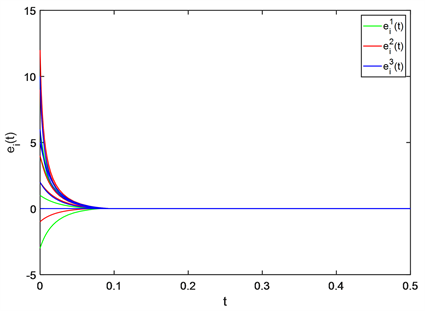
Figure 2. Fixed-time synchronization error chart of networks (21) and (22)
图2. 网络(21)与(22)的固定时间同步误差图
Figure 3. Preassigned-time synchronization error chart of networks (21) and (22)
图3. 网络(21)与(22)的预定时间同步误差图
6. 结论
本文基于固定时间稳定性定理,设计了新的状态反馈控制器实现了同时具有内部时变时滞和耦合时变时滞的不连续复杂网络的固定时间与预定时间同步。并通过构造新的Lyapunov-Krasovskii泛函,在不连续框架下推导出时滞不连续复杂网络的固定与预定时间同步的判定准则。并进行了数值模拟来验证理论的正确性与控制器的有效性。本文所得出的定理不仅适用于时变时滞网络,同样适用于常时滞网络。我们知道,如果出现脉冲扰动,系统的动态分析将会变得困难。因此,具有时变时滞和脉冲扰动的复杂网络的固定时间与预定时间同步将会是未来的工作之一。
文章引用
李兴瑞,单美华,史东鑫. 具有时变时滞的不连续复杂网络固定与预定时间同步
Fixed/Preassigned-Time Synchronization of Discontinuous Complex Networks with Time-Varying Delays[J]. 应用数学进展, 2022, 11(09): 6799-6810. https://doi.org/10.12677/AAM.2022.119720
参考文献
- 1. Song, X., Man, J., Song, S., Zhang, Y. and Ning, Z. (2020) Finite/Fixed-Time Synchronization for Markovian Com-plex-Valued Memristive Neural Networks with Reaction-Diffusion Terms and Its Application. Neurocomputing, 414, 131-142. https://doi.org/10.1016/j.neucom.2020.07.024
- 2. Liu, L., Zheng, W.X. and Ding, S. (2020) An Adap-tive SOSM Controller Design by Using a Sliding-Mode-Based Filter and Its Application to Buck Converter. IEEE Transactions on Circuits and Systems I: Regular Papers, 67, 2409- 2418. https://doi.org/10.1109/TCSI.2020.2973254
- 3. Wu, Y., Cao, J., Li Q., Ahmed, A. and Fuad, E. (2017) Fi-nite-Time Synchronization of Uncertain Coupled Switched Neural Networks under Asynchronous Switching. Neural Networks, 85, 128-139.
https://doi.org/10.1016/j.neunet.2016.10.007
- 4. Yang, X., Song, Q., Liang, J. and He, B. (2015) Finite-Time Synchronization of Coupled Discontinuous Neural Networks with Mixed Delays and Nonidentical Perturbations. Jour-nal of the Franklin Institute, 352, 4382-440.
https://doi.org/10.1016/j.jfranklin.2015.07.001
- 5. Chen, X., Huang, T., Cao J., Ju, H. and Qiu, J. (2019) Fi-nite-Time Multi-Switching Sliding Mode Synchronisation for Multiple Uncertain Complex Chaotic Systems with Net-work Transmission Mode. IET Control Theory & Applications, 13, 1246-1257. https://doi.org/10.1049/iet-cta.2018.5661
- 6. Rakkiyappan, R. and Sakthivel, N. (2015) Cluster Synchronization for T-S Fuzzy Complex Networks Using Pinning Control with Probabilistic Time-Varying Delays. Complexity, 21, 59-77. https://doi.org/10.1002/cplx.21543
- 7. Wu, Z.G., Shi, P., Su, H. and Chu, J. (2013) Sampled-Data Expo-nential Synchronization of Complex Dynamical Networks with Time-Varying Coupling Delay. IEEE Transactions on Neural Networks and Learning Systems, 24, 1177- 1187. https://doi.org/10.1109/TNNLS.2013.2253122
- 8. Chen, C., Li, L., Peng, H., Kurths, J. and Yang, Y. (2018) Fixed-Time Synchronization of Hybrid Coupled Networks with Time-Varying Delays. Chaos, Solitons & Fractals, 108, 49-56. https://doi.org/10.1016/j.chaos.2018.01.027
- 9. Lü. H., He, W., Han, Q.L. and Peng, C. (2019) Fixed-Time Pinning-Controlled Synchronization for Coupled Delayed Neural Networks with Discontinuous Activations. Neural Networks, 116, 139-149.
https://doi.org/10.1016/j.neunet.2019.04.010
- 10. Hu, J., Sui, G. and Li, X. (2020) Fixed-Time Synchronization of Complex Networks with Time-Varying Delays. Chaos, Solitons & Fractals, 140, Article ID: 110226. https://doi.org/10.1016/j.chaos.2020.110216
- 11. Huang, L., Guo, Z.Y. and Wang, J.F. (2011) Theory and Appli-cations of Differential Equations with Discontinuous Right-Hand Sides. Science Press, Beijing.
- 12. Forti, M. and Nistri, P. (2003) Global Convergence of Neural Networks with Discontinuous Neuron Activations. IEEE Transactions on Cir-cuits and Systems I: Fundamental Theory and Applications, 50, 1421-1435.
https://doi.org/10.1109/TCSI.2003.818614
- 13. Hu, C., He, H. and Jiang, H. (2020) Fixed/Preassigned-Time Synchronization of Complex Networks via Improving Fixed-Time Stability. IEEE Transactions on Cybernetics, 51, 2882-2892. https://doi.org/10.1109/TCYB.2020.2977934
- 14. Xiao, J., Zeng, Z., Wen, S., Wu, A. and Wang, L. (2020) Finite-/Fixed-Time Synchronization of Delayed Coupled Discontinuous Neural Networks with Unified Control Schemes. IEEE Transactions on Neural Networks and Learning Systems, 32, 2535-2546. https://doi.org/10.1109/TNNLS.2020.3006516
- 15. Liu, J. and Wu, H. (2022) Global Fixed-Time Synchronization for Coupled Time-Varying Delayed Neural Networks with Multi-Weights and Uncertain Couplings via Periodically Semi-Intermittent Adaptive Control. Soft Computing, 26, 1685-1702. https://doi.org/10.1007/s00500-021-06631-2
NOTES
*通讯作者。









