Hans Journal of Agricultural Sciences
Vol.08 No.04(2018), Article ID:24513,7
pages
10.12677/HJAS.2018.84043
Field Watering Design Based on ARM Machine Vision
Lili Liang
Feicheng Agricultural Machinery Administration, Feicheng Shandong

Received: Apr. 3rd, 2018; accepted: Apr. 18th, 2018; published: Apr. 25th, 2018

ABSTRACT
China’s agricultural mechanization is still in its infancy, especially in watering which is time-consuming and labor-intensive, and low mechanized. It is impossible to control the amount of watering in the optimal range for the growth of crops and wastes water resources. In response to this situation, a machine for automatic quantitative watering of crops under the control of the ARM development system was designed. When the aircraft advances under the traction of the engine, the position of the plant on the ridge is detected by the camera, and the acquired data is transmitted to the ARM board through the data line (ARM development board, that is, using ARM (Advanced RISC Machines) company’s core chip as CPU, and other embedded peripheral development board). The ARM board sends a control signal to the control circuit of the relay to control the electronic control. The switch is closed and the solenoid valve is turned on to complete the watering operation. Through tests, it shows that the aircraft has stable operation performance, stable operation, easy operation, safety, convenient and simple adjustment and maintenance, automatic watering of plant seedlings, and improved work efficiency.
Keywords:Automation, Control, Field, Quantitative Watering
基于ARM机器视觉的田间浇水设计
梁丽丽
肥城市农业机械管理局,山东 肥城
收稿日期:2018年4月3日;录用日期:2018年4月18日;发布日期:2018年4月25日

摘 要
我国的农业机械化还处在起步阶段,特别是在浇水这一环节费时费力,机械化程度低,无法将浇水量控制在农作物生长所需要的最佳范围,浪费了水资源。针对这一情况,本文设计了一种基于ARM开发系统控制下的对农作物进行自动定量浇水的机器。该机在发动机的牵引下前进时,先由摄像头检测出垄上的植株位置,并通过数据线将所获取的数据传递给ARM板(ARM开发板,即以英国ARM (Advanced RISC Machines)公司的内核芯片作为CPU,同时附加其他外围功能的嵌入式开发板)。ARM板向继电器控制电路中发送控制信号,以控制电控开关的闭合,电磁阀得电打开完成浇水作业。通过试验表明该机作业性能稳定,运行平稳,易于操作,安全和调整维护方便简单,实现了对植物幼苗的自动化浇水,提高了作业效率。
关键词 :自动化,控制,田间,定量浇水

Copyright © 2018 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
农业是我国经济发展的重要组成部分 [1] 。水分直接影响着植物的生长发育以及产量和品质 [2] [3] [4] [5] ,适时、适量的浇水是保证农民获得高产优质蔬菜的重要环节。
目前,节水灌溉方式主要有滴灌、喷灌、沟灌和穴灌 [6] 。
滴灌是通过安装在毛管上的滴头、孔口或滴灌带等灌水器将水一滴一滴地、均匀而又缓慢地滴入作物根区附近土壤中的灌水形式。缺点是:容易堵塞;导致盐渍化;影响农作物根系发展。
喷灌是指利用动力设备驱动相关机械,使水在压力作用下通过喷嘴(喷头)喷射到空中,然后以雨滴的状态洒落至烟田的灌溉方式,局限是受风影响大;设备投资高;耗能大。
沟灌作业一般采用单沟灌水,即一沟挨着一沟依次灌水,水分沿着水沟渗透两侧垄,沟底部分在重力的作用下浸润土壤。作业速度快,而且地温变化相对较小,作业效果优于单沟灌,但容易使土壤结构被破坏。穴灌作业时在相邻两株烟草的中间打一个直径和深度均为20 cm左右的穴(孔),然后舀水逐穴(孔)进行灌水,每穴(孔)灌满为止,但作业费时费工 [7] 。
我国的灌溉机械还处在起步阶段,浇水这一环节费时费力,机械化程度地,无法按需浇水。实现机械自动化浇水是保障农业经济效益的有效措施。
针对这一现象,本文研制了一种基于ARM控制系统下的田间自动化定量浇水,可自动确定植株位置,精准浇水,节约水资源。
2. 整体结构与主要技术指标
2.1. 整体结构
田间自动化定量浇水机采用自走式,主要由动力系统、传动系统、行走系统、检测控制系统、光箱、水箱、潜水泵、电瓶、电磁阀等组成,总体结构如图1所示。2个12 V蓄电池串联后作为电磁阀和潜水
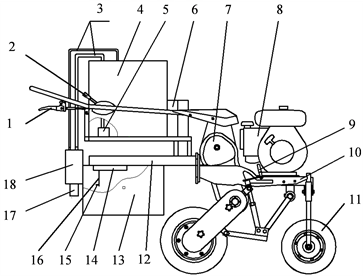 1. 转向离合;2. 行走离合;3. 输水管;4. 水箱;5. 潜水泵;6. 电瓶;7. 变速箱;8. 发动机;9. 高度调节丝杠;10. 机架;11. 行走系统;12. 光箱悬挂架;13. 光箱;14. 检测控制系统;15. 摄像头;16. 摄像头悬挂架;17. 电磁阀;18. 储水罐。
1. 转向离合;2. 行走离合;3. 输水管;4. 水箱;5. 潜水泵;6. 电瓶;7. 变速箱;8. 发动机;9. 高度调节丝杠;10. 机架;11. 行走系统;12. 光箱悬挂架;13. 光箱;14. 检测控制系统;15. 摄像头;16. 摄像头悬挂架;17. 电磁阀;18. 储水罐。
Figure 1. Automatic quantitative watering machine structure diagram
图1. 自动化定量浇水机结构简图
泵的启动电压,所有负极接地。光箱通过光箱悬挂架固定在浇水机后方,光箱上方安装着监测控制系统,摄像头通过悬挂架固定在光箱中心线后方位置,摄像头尾部通过数据线与ARM板连接,光箱里面均匀布置着8个灯条安置架,每条灯条安置架上面都安装着一个12 V LED灯条和漫射板。水箱里安置一个潜水泵,通过两条输水软管与储水罐相连接,水箱里的水通过潜水泵、电磁阀和两条输水管循环起来,保证储水罐里时刻充满水。储水罐连接在光箱后方中间位置,其底部与电磁阀相连。
2.2. 工作原理
浇水前,首先调正浇水机,使摄像头位于烟垄中心线正上方。根据垄高调节高度调节丝杠以调整整机高度,然后调节光箱悬挂架使机器行进过程中光箱不碰触植株,且能隔绝外界大部分光线。最后调节摄像头悬挂装置,使得摄像头距离垄顶平面的垂直距离为10~15 cm,距电磁阀的水平距离为12~15 cm。
浇水机工作时,打开行走离合,变速箱将来自发动机的动力传给行走机架,带动浇水机的前进。打开ARM板开关和潜水泵开关,安装在ARM板上的摄像头在行走过程中检测植株位置,获取图像,然后将数据传递给ARM板,ARM板将摄像头取得的数据与原始设定的数据作比较,如果摄像头所获取的数据在所设定的数据范围内,则认为检测到烟草位置。此时ARM板将向继电器控制电路输出一个低电平信号,继电器控制电路接收到该信号后,位于继电器中的电控开关闭合,电磁阀得电导通,完成浇水。浇水量可以通过电磁阀打开的时间长短来控制,电磁阀打开时间通过ARM板输出的信号控制。
2.3. 主要技术指标
依据浇水农艺和浇水机功能特征要求,确定自动化定量浇水主要技术指标如表1所示。
浇水机的实物图如图2所示。
3. 机器视觉部分
3.1. 图像特征
1) 颜色特征。这是一种全局的特征,主要描述了目标图像或者目标图像区域所对应事物的表面性质。

Table 1. Main technical parameters
表1. 主要技术指标

Figure 2. Physical map of automatic quantitative watering machine
图2. 自动化定量浇水机实物图
2) 纹理特征。纹理特征指的是图像的灰度等级变化,它反应的是物体表面的方向性、粗糙度以及物体表面所符合的某种规则性。
3) 形状特征。这是图像中一种高级的视觉特征,可以用来表示目标物体的姿态和结构 [8] 。
3.2. 检测算法
采集植物幼苗田图像,对图像的颜色特征进行分析。对图像中植物、黄土、黑地膜、白地膜分别随机选50个像素点,逐一提取每个目标像素点的R分量值、G分量值、B分量值,并根据提取数据画出以上四个目标的RGB分量值散点图。需要计算分析四个目标RGB三个通道数据之间的关系来确定区分植物目标的阈值 [9] [10] 。
然后分别计算四个目标的各通道分量值均值,以计算出的R、G、B分量均值作为该张图像数据中植物、黄土、黑地膜、白地膜的代表值:
(3-1)
(3-2)
(3-3)
1) G-R梯度变化
在G-R归一化数据图中,烟草数值最大,与烟草数据相距最近的是黑地膜数据。计算烟草数据与黑地膜数据的梯度变化。
2) G-B梯度变化
在G-B归一化数据图中,烟草数值最大,与烟草数据相距最近的是黄土数据。计算烟草数据与黄土数据的梯度变化。
3) B-R梯度变化
在B-R归一化数据图中,烟草数据介于黄土和白地膜之间,与烟草数据相距最近的是黄土数据。计算烟草数据与黄土数据的梯度变化。
4) G/B梯度变化
在G/B归一化数据图中,烟草数据最大,与烟草数据相距最近的是黄土数据,计算烟草数据与黄土数据的梯度变化。
3.3. 检测控制系统
检测控制系统是浇水机的核心部分,用以实现烟草位置的检测,电磁阀开闭的控制和浇水量大小的控制。
检测控制系统主要由ARM板、摄像头和继电器控制电路组成,检测控制系统固定在光箱顶部的检测控制系统安装口上。ARM板和继电器控制电路由两个12 V电瓶串联后,通过电源转换模块将电压转换成5 V供电,所有负极接地。其工作流程图如图3所示。
摄像头固定在光箱中的摄像头悬挂架上面,可实现摄像头前后方向和上下方向的位置调节,摄像头尾部通过数据线与ARM板相连,并通过数据线将所获取的数据传递给ARM板。
ARM板中存储着设定好的程序,不同的颜色在ARM板的程序中存储的数据是不一样的,经过大量试验,总结出在ARM板的程序中代表烟草“绿色”的合适数据范围 [11] [12] 。ARM板接收到摄像头采集的图像数据后,对数据进行分析和处理,当所获取的数据在代表“绿色”的数据范围内时,ARM板向继电器控制电路输出低电平脉冲信号,以控制继电器中电控开关的闭合。通过设定的程序可以控制低电平脉冲信号的长短,从而确定继电器中电控开关的闭合时间。
继电器控制电路用来控制电磁阀的打开和关闭。当继电器控制电路接收到ARM板发出的信号后,通过光电耦合器使该信号完成“电–光–电”的转变,从而控制继电器中电控开关得电闭合,此时电磁阀得电导通,完成浇水。当低电平脉冲信号结束时,继电器中的电控开关打开,电磁阀关闭,结束浇水。
3.4. 检测系统流程
浇水机前进,摄像头采集图像数据,提取图像中间640个像素点的RGB值,计算各像素点G-B值、

Figure 3. Test control system workflow
图3. 检测控制系统工作流程图
G-R值并归一化处理,当至少有70个像素点满足G-B值> 0.85且G-R值> 0.85,再提取500 × 50像素区域RGB分量,计算各像素点G-B值、G-R值并归一化处理,在计算图像数据的G-B数值与G-R数值,并进行归一化处理后,所有代表植株的G-B特征值最小为0.81,G-R特征值最小为0.8431。因此,以G-R > 0.85且G-B > 0.85作为区分植株与黄土、黑地膜、白地膜的阈值。当至少有5000个像素点满足G-B值> 0.85且G-R值> 0.85时输出控制信号,电磁阀打开,浇水量延时,输出信号结束 [13] 。
自动化浇水机检测系统设计中还需要必要的软件支持。Visual Studio是目前非常流行的,由微软公司开发的Windows平台应用程序开发环境。集成开发环境的界面增加了很多新的功能,变得更加高效,同时也更加简单明了 [14] 。本设计检测系统软件编程采用C语言程序,基于Open CV,以VS2010为开发环境进行编写。
摄像头固定在光箱中的摄像头悬挂架上面,可实现摄像头前后方向和上下方向的位置调节,摄像头尾部通过数据线与ARM板相连,并通过数据线将所获取的数据传递给ARM板。
ARM板中存储着设定好的程序,不同的颜色在ARM板的程序中存储的数据是不一样的,经过大量试验,总结出在ARM板的程序中代表烟草“绿色”的合适数据范围。ARM板接收到摄像头采集的图像数据后,对数据进行分析和处理,当所获取的数据在代表“绿色”的数据范围内时,ARM板向继电器控制电路输出低电平脉冲信号,以控制继电器中电控开关的闭合。通过设定的程序可以控制低电平脉冲信号的长短,从而确定继电器中电控开关的闭合时间。
继电器控制电路用来控制电磁阀的打开和关闭。当继电器控制电路接收到ARM板发出的信号后,通过光电耦合器使该信号完成“电–光–电”的转变,从而控制继电器中电控开关得电闭合,此时电磁阀得电导通,完成浇水。当低电平脉冲信号结束时,继电器中的电控开关打开,电磁阀关闭,结束浇水。
文章引用
梁丽丽. 基于ARM机器视觉的田间浇水设计
Field Watering Design Based on ARM Machine Vision[J]. 农业科学, 2018, 08(04): 272-278. https://doi.org/10.12677/HJAS.2018.84043
参考文献
- 1. 陈恩名, 朱志伟, 张晓辉. 我国田间生产机械化现状及发展对策[J]. 农机化研究, 2008(10): 227-229.
- 2. 韩锦峰, 汪耀富, 钱晓刚, 等. 烟草栽培生理[M]. 北京: 中国农业出版社, 2003: 212-223.
- 3. Yan, J.Q.,Wang, J., Tissue, D., et al. (2003) Pho to Synthesis and Seedproduction under Water-Deficit Conditions in Transgenictobacco Plants That over Express an Arabidopsis Ascor-bate Peroxidase Gene. Crop Science, 43, 1477-1483. https://doi.org/10.2135/cropsci2003.1477
- 4. 景生, 康绍忠. 我国水资源利用现状与节水灌溉发展对策[J]. 农业工程学报, 2000, 16(2): 1-4.
- 5. 李宝筏. 农业机械学[M]. 北京: 中国农业出版社, 2005.
- 6. 范连祥. 基于机器视觉技术的烟草智能浇水机的研制[D]: [硕士学位论文]. 泰安: 山东农业大学, 2016.
- 7. 荣廷昭, 李晚沈. 田间实验与统计分析[M]. 成都: 四川大学出版社, 2001.
- 8. Robert, P.C. (1999) Precision Agriculture: An Information Revolution in Agrieuhure. Agriculture Outlook Fo-rum, 1999, 1-5.
- 9. 李红俊, 韩冀皖. 数字图像处理技术及其应用[J]. 计算机测量与控制, 2002, 10(9):620-622.
- 10. 阮秋琦. 数字图像处理学[M]. 北京: 电子工业出版社, 2001.
- 11. 刘中合, 王瑞雪, 王锋德, 等. 数字图像处理技术现状与展望[J]. 计算机时代, 2005(9):6-8.
- 12. 张贵明. 简明农业机械设计标准应用手册[M]. 北京: 机械工业出版社, 1993.
- 13. 张建民. 机电一体化系统设计[M]. 北京: 北京理工大学出版社, 2001.
- 14. 朱淼良. 计算机视觉[M]. 杭州: 浙江大学出版社, 1998.