Mechanical Engineering and Technology
Vol.
11
No.
02
(
2022
), Article ID:
50657
,
7
pages
10.12677/MET.2022.112017
滚珠丝杠副运动精度可靠性柔性分析
刘亚西,孙奎洲
江苏理工学院机械工程学院,江苏 常州
收稿日期:2022年3月16日;录用日期:2022年4月15日;发布日期:2022年4月24日

摘要
滚珠丝杠机构在高速重载并且要求精度高的情况下,考虑其构件因为受力产生变形,把钢珠和丝杠作为柔性构件对滚珠丝杠副进行可靠度计算。首先通过Solidworks进行三维建模,然后把模型导入ADAMS中进行参数化,利用ADAMS柔性体模块对丝杠和钢珠进行柔性化处理,进行刚性模型仿真和柔性模型仿真,并且利用MC和Insight模块产生随机数,求出刚性模型和柔性模型的可靠度。最后得到滚珠丝杠副柔性构件对位移可靠度影响较小,对速度和加速度的运动精度影响较大。
关键词
滚珠丝杠,柔性化,可靠度,ADAMS

Flexible Analysis of Ball Screw Motion Accuracy Reliability
Yaxi Liu, Kuizhou Sun
School of Mechanical Engineering, Jiangsu University of Technology, Changzhou Jiangsu
Received: Mar. 16th, 2022; accepted: Apr. 15th, 2022; published: Apr. 24th, 2022

ABSTRACT
When the ball screw mechanism is at high speed, heavy load, and high accuracy requirements, considering the deformation of its members due to stress, steel balls and screw are used as flexible components to calculate the reliability of the ball screw pair. First, three-dimensional modeling is performed by Solidworks. Then, the model is imported into ADAMS for parameterization, using the ADAMS flexible body module to flexibly process the screw and steel balls, and perform rigid model simulation and flexible model simulation, and using MC and Insight modules to generate random numbers to obtain the reliability of the rigid model and the flexible model. Finally, it is concluded that the flexible construction of ball screw pair has little influence on the reliability of displacement and great influence on the motion accuracy of speed and acceleration.
Keywords:Ball Screw, Flexibility, Reliability, ADAMS

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
滚珠丝杠副是数控机床进给系统中重要的组成部分,作为一种精密传动部件,滚珠丝杠具有传动效率高、灵敏度高、传动平稳等优点 [1]。机构的运动精度可靠性是指机构在规定的使用条件下,规定的时间内,准确、及时、协调地完成规定运动的能力 [2]。东北大学周亮根据加工中心中滚珠丝杠副的安装位置要求以及滚珠丝杠副的结构形式和支撑方式,对滚珠丝杠副进行参数化建模,应用有限元软件ANSYS研究分析了滚珠丝杠以及滚珠丝杠副的固有振动特性,用蒙特卡洛数字仿真方法,实现了滚珠丝杠副运动可靠性分析 [2]。哈尔滨工业大学许付松以柔性曲柄滑块机构为研究对象,考虑间隙与构件柔性耦合的机构对运动精度可靠性研究 [3]。考虑机构的柔性对运动精度可靠性的影响越来越引起学者的重视。
在精度要求不高的情况下,把滚珠丝杠作为刚性系统处理可以满足需求,但滚珠丝杠在一些高速重载、精度要求高的场合就不能把所有构件当作刚性的处理。在高速重载下,滚珠分别与丝杠滚道面、螺母进行双接触,传递载荷,并产生接触形变 [4]。本文把滚珠以及丝杠作为柔性体,利用ADAMS/view以及Insight模块进行分析研究,提出一种分析滚珠丝杠可靠性的方法。
2. 滚珠丝杠副理论分析
滚珠丝杠副是在丝杠和螺母之间放入适量的滚珠来使丝杠与螺母之间由滑动摩擦变为滚动摩擦的螺旋传动元件。滚珠丝杠副在机械传动中的作用是,可以将旋转运动变为直线运动,同样也可以将直线运动变为旋转运动 [5]。由赫兹接触理论可得知滚珠丝杠的主曲率对滚珠丝杠副的弹性形变有着极大的影响 [6]。因此需要建立螺母、丝杠滚道的螺旋面方程,以此计算出滚珠丝杠副的主曲率半径,从而代入滚珠丝杠副的公式中,求出滚柱丝杠副的接触变形量函数。
(1) 建立螺旋滚道方程
螺旋侧滚道的螺旋面方程:
(1)
丝杠的滚道螺旋面方程:
(2)
(2) 接触点曲率方程的建立:
螺母滚道面的的曲率:
(3)
丝杠滚道面曲面的主曲率:
(4)
(3) 接触变形计算分析:
滚珠与丝杠滚道之间的变形:
(5)
滚珠与螺母滚道之间的变形为:
(6)
滚珠丝杠副滚珠与滚道之问的总形变量为丝杠,螺母滚道与滚珠的接触形变量之和:
(7)
滚珠丝杠的轴向形变和法向形变关系可知:
(8)
最后得到总变形量为:
(9)
通过赫兹接触变形理论得到了滚珠丝杠副的变形方程,该方程考虑了除了尺度误差以外的弹性变形对运动精度可靠性的影响,为仿真和计算可靠度打下基础。
3. 建模仿真
滚珠丝杠作为广泛使用的直线进给平台,鉴于滚珠丝杠机构本身的复杂性,不适合利用ADAMS进行建模,所以利用Solidworks建立滚珠丝杠的三维模型,然后导入ADAMS中。为保证计算的精度和准确性,滚珠丝杠选用型号为丝杠直径为20 mm,导程为10 mm,滑台宽度为200 mm,底座总长为580 mm,工作台长度为200 mm的精密滚珠丝杠副。建立模型见图1。
为了更好的对滚珠丝杠进行可靠性分析,对其进行参数化建模。因为三维模型是由Solidworks创建导入ADAMS,所以先创建丝杠的关键点和滚珠的关键点坐标,进行关键点模型创建,施加约束和驱动。为了能清晰的辨明柔性构件对运动精度可靠性的影响,在滑台上方施加10,000 N的力,将滚珠丝杠的尺寸误差作为输入变量,建立参数化模型。将滚珠的大小、直线导轨宽度以及丝杠螺距作为设计变量。参数化表格见表1。
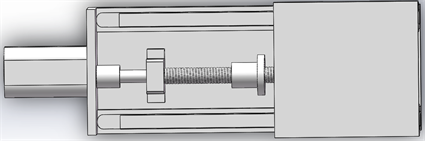
Figure 1. Ball screw 3D model diagram
图1. 滚珠丝杠三维模型图

Table 1. Table of dimension design variables
表1. 尺寸设计变量表
Adams/view为用户提供了柔性体模块,有三种方法可以进行柔性体建模 [7]。第一种是直接利用Adams Flex创建柔性体;第二种是离散柔性体的方式,需要选择被柔性化刚体的起点和终止点,在两者之间进行离散,该方法可以像编辑其他刚性构件一样来编辑每段离散件;第三种使用刚体转换为柔性体的方式直接进行柔性体的创建,只需要选择构件、材料和计算模态即可,且与刚体相关联的运动副和载荷会自动转移到柔性体上。这里由于对直线导轨和滚珠进行了替换,重新进行施加约束,所以选用最为合适的第三种方式进行柔性化。
4. 运动精度可靠性分析
相对于刚性构件而言,柔性构件的变形运动与机构刚体运动相耦合导致柔性机构运动参数产生波动。所以在柔性机构进行运动分析时除了要考虑由于制造精度、装配误差、材料品质、运动副间隙等随机误差以外,还要把时间、位移、角位移、速度、角速度、加速度和角加速度这些运动学参数考虑在内。柔性机构的运动精度指的是运动参数的误差大小,柔性机构运动的实际误差在整个运动时域内也是时变的。柔性机构的运动精度可靠性可以描述为:在运动时域内的任意时刻,运动参数的误差应该小于给定的精度的概率。由于柔性机构运动精度本身的复杂性,一般情况下,无法得到整个时域内的精度可靠性要求,只能求出特定时刻的运动参数和运动精度要求 [8]。在模块中设置的所有参数进行仿真,对滚珠丝杠进行仿真,生成结果文件,然后利用ADAMS/Postprocessor模块的后处理功能,生成柔性体下的分析图像,计算可靠度,仿真结果见图2~4。
在平台上施加载荷后,通过图2~4得到,在高速重载情况下,随着速度的提高,柔性构件的变形导致机构运动精度下降,使机构的运动精度可靠性下降。其中,滚珠会因为承受过大的力而产生变形,对于丝杠因为其和滚珠有直接性的接触,以及自身结构是细长杆件,在承受较大的重量时,会因为受力变形,对滚珠丝杠副的运动精度产生影响,对运动精度可靠性产生误差,以至于无法满足可靠性要求。而相对与导轨和滑块因为其机构本身特点,能够承受相对更大的力,产生的变形较小,对运动精度的影响较小。因此在高速重载情况下,也应考虑减小间隙和选择好的材料以此提高滚珠丝杠副的运动精度。
通过对刚性模型和柔性模型仿真的结果,处理文件,计算可靠度。所研究的误差服从正态分布,那么计算可靠度的公式如下:

Figure 2. Slider displacement curve
图2. 滑块位移曲线
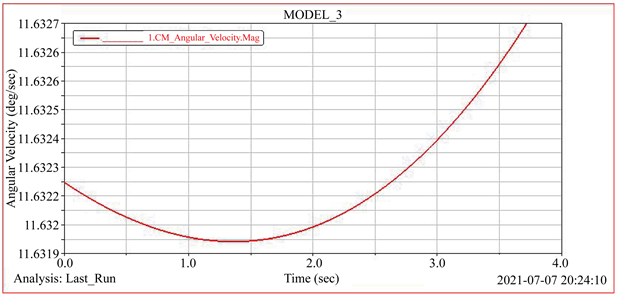
Figure 3. Ball angle acceleration curve
图3. 滚珠角加速度曲线
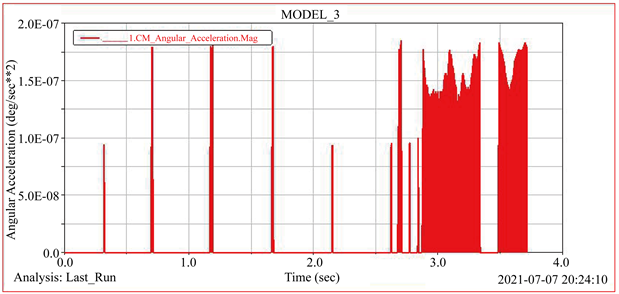
Figure 4. Lead screw angle acceleration curve
图4. 丝杠角加速度曲线
(10)
化为标准正态分布为:
(11)
其中:
(12)
式中:μ0、σ0为允许极限误差的分布特征值;μ、σ 为上面根据仿真结果文件计算出来的运动误差的分布特征值。由此可以计算出可靠度。
MC方法是最简单、最直观的随机模拟方法,又称为随机抽样或统计实验方法,是一种通过随机变量的数字模拟和统计分析求解工程技术问题近似解的数值方法 [9]。根据MC法产生1000组随机数,利用Insight模块对随机数进行可靠度计算,求出均值与方差,算出期望值和标准差,然后把期望值和标准差代入正态分布的公式得到概率值。滚珠丝杠副丝杠的公差为±0.05,求出置信空间,概率值和置信空间的比值为可靠度。可靠度见表2。
Table 2. Motion reliability in both cases
表2. 两种情况运动可靠度
5. 结论
本文通过对滚珠丝杠副进行理论分析,利用Solidworks和ADAMS/view对滚珠丝杠建模仿真分析,基于ADAMS/Insight分析和MC方法得到刚性模型以及把钢珠和丝杠作为柔性构件的模型可靠度。该分析基于以往对滚珠丝杠刚性模型的可靠性研究,不仅仅考虑其刚性模型所产生的基本制造装配误差,而将其关键构件柔性化处理,求解可靠度,得到滚珠丝杠副的位移、速度和加速度的可靠度都有降低,其中,对加速度的可靠度的影响明显,得到将丝杠和滚珠作为柔性构件时,滚珠丝杠运动精度可靠性会降低。最后,在高速重载,精度要求又高的情况下,使用滚珠丝杠副时,应提高滚珠和丝杠的刚度,以此提高运动精度可靠性。
基金项目
江苏理工学院研究生实践创新计划项目XSJCX21_37。
文章引用
刘亚西,孙奎洲. 滚珠丝杠副运动精度可靠性柔性分析
Flexible Analysis of Ball Screw Motion Accuracy Reliability[J]. 机械工程与技术, 2022, 11(02): 138-144. https://doi.org/10.12677/MET.2022.112017
参考文献
- 1. 张明鑫. 滚珠丝杠螺母结合面参数识别及其进给系统研究[D]: [硕士学位论文]. 南京: 南京理工大学, 2013.
- 2. 周亮. 滚珠丝杠副的模态分析及其运动可靠性分析[D]: [硕士学位论文]. 沈阳: 东北大学, 2011.
- 3. 袁哲善. 基于随机极值响应面法的柔性机构可靠性研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨理工大学, 2020.
- 4. 赵佳佳, 林明星, 宋现春, 骆伟超, 宋丽伟. 复合载荷下滚珠丝杠副全滚珠载荷分布建模与分析[J]. 机械工程学报, 2020, 56(17): 126-136.
- 5. 钟金豹, 尹明, 李鑫, 余国俊. 滚珠丝杠副滚道磨损的有限元模拟分析[J]. 机床与液压, 2020, 48(21): 155-159.
- 6. 李福华. 滚珠丝杠进给系统动力学建模、参数辨识与动态误差补偿[D]: [博士学位论文]. 北京: 清华大学, 2018.
- 7. 李文成, 万朝燕, 方盼盼, 赵旭. 含柔性构件机构运动可靠性仿真分析[J]. 大连交通大学学报, 2014, 35(4): 40-43.
- 8. 张春宜, 宋鲁凯, 费成巍, 郝广平, 路成. 柔性机构动态可靠性分析的先进极值响应面方法[J]. 机械工程学报, 2017, 53(7): 47-54.
- 9. 董聪. 现代结构系统可靠性理论及其应用[M]. 北京: 科学出版社, 2001.