Modeling and Simulation
Vol.
12
No.
02
(
2023
), Article ID:
62080
,
12
pages
10.12677/MOS.2023.122064
一类二阶欠驱动系统的自适应有限时间滑模 控制
王蓉1,刘永春1,2,刘鑫1
1四川轻化工大学自动化与信息工程学院,四川 自贡
2人工智能四川省重点实验室,四川 自贡
收稿日期:2023年1月3日;录用日期:2023年2月22日;发布日期:2023年3月3日

摘要
基于有限时间稳定性理论和分层滑模控制原理,本文研究了一类具有外部干扰和模型不确定性的二阶欠驱动系统的跟踪控制问题。首先,采用非线性滑模面设计有限时间分层滑模控制器,使得系统达到全局有限时间稳定并且避免了奇异现象。其次,为了提高系统的鲁棒性,采用RBF (Radial Basis Function)神经网络对系统的外部干扰和模型不确定性的上界进行实时逼近以及采用自适应控制设计神经网络更新律。再次,利用Lyapunov稳定性理论和齐次性理论证明系统的渐近稳定性和全局有限时间收敛性。最后,通过仿真结果验证了该控制方法的有效性。
关键词
欠驱动系统,分层滑模控制,有限时间控制,RBF神经网络

Adaptive Finite-Time Sliding Mode Control for a Class of Second-Order Underactuated Systems
Rong Wang1, Yongchun Liu1,2, Xin Liu1
1College of Automation and Information Engineering, Sichuan University of Science & Engineering, Zigong Sichuan
2Artificial Intelligence Key Laboratory of Sichuan Province, Zigong Sichuan
Received: Jan. 3rd, 2023; accepted: Feb. 22nd, 2023; published: Mar. 3rd, 2023

ABSTRACT
Based on finite time stability theory and hierarchical sliding mode control principle, this paper studies the tracking control problem of a second-order underdrive system with external interference and model uncertainty. Firstly, the nonlinear sliding mode surface is used to design a finite time hierarchical sliding mode controller, which makes the system achieve global finite time stability and avoids singular phenomenon. Secondly, In order to improve the robustness of the system, the radial basis function (RBF) neural network is used to approximate the upper bounds of the system’s external disturbance and model uncertainty in real time, and the neural network updating law is designed by adaptive control. Thirdly, Lyapunov stability theory and homogeneity theory are used to prove the asymptotic stability and global finite-time convergence of the system. Finally, the effectiveness of the control method is proved by simulation results.
Keywords:Underactuated System, Hierarchical Sliding Mode Control, Finite-Time Control, RBF Neural Network

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,欠驱动系统的应用逐渐广泛,常见的欠驱动系统有机械臂、倒立摆、桥式起重器、四旋翼无人机等。但是在欠驱动系统的控制过程中,由于系统的控制量个数小于自由度个数,以至于系统的部分自由度无法进行直接控制,但是由于欠驱动系统在驱动器的数量少于全驱动系统,可以节约能源,因此欠驱动系统的控制研究具有意义的。
滑模控制方法是一种简单有效的鲁棒控制方法,且响应快速。虽然滑模控制器具有鲁棒性,但是抖振现象是不可避免的,滑模控制中的切换项用于消除外界干扰和建模过程中带来的不确定项,但是过大的切换项会导致较大的抖振,极大的影响到跟踪控制性能,所以外界干扰及不确定项是滑模控制中抖振的主要来源之一 [1] 。因此滑模控制常和模糊控制 [2] ,神经网络 [3] [4] ,智能搜索算法相结合 [5] ,这些自适应控制方法可以提高对系统不确定性的控制性能。神经网络具有自学习能力和非线性映射功能,可以对任意的非线性函数进行逼近。基于分层滑模控制和在线扰动估计技术,文献 [6] 研究了两轮平衡车的跟踪控制问题。基于分层滑模控制和自适应控制,文献 [7] 研究了球形机器人在存在外部干扰和输入饱和的情况下的控制问题。基于扰动观测器的分层滑模控制,文献 [8] 研究了欠驱动浮力风力机的动态建模和鲁棒控制。基于反步法和分层滑模算法,文献 [9] 解决了参数不确定和外部负载的多轴驱动系统的跟踪控制问题。然而,文献 [6] [7] [8] [9] 采用的都是普通的线性滑模面,仅能保证系统渐近收敛却不能保证系统的状态变量在收敛阶段达到有限时间内收敛。基于自适应模糊分层滑模控制,文献 [10] 解决了执行器故障的不确定欠驱动系统的控制问题。虽然文献 [10] 采用了有限时间收敛的趋近律,使得系统在趋近阶段有限时间稳定,但是没有考虑收敛阶段的有限时间稳定。基于分层快速终端滑模控制,文献 [11] 解决了桥式起重机的负载的抗摇摆控制问题。基于双终端滑模控制,文献 [12] 实现了机器人机械手的有限时间收敛问题。虽然文献 [11] [12] 采用了非线性滑模面使系统在收敛阶段有限时间内稳定,但是控制律存在奇异现象,导致系统产生较大的抖振现象,影响了滑模控制器的鲁棒性,同时没有考虑模型不确定性和未知干扰的影响。因此,欠驱动系统的有限时间收敛还没有被充分研究。
因此,基于有限时间稳定性理论和分层滑模控制原理,本文重点考虑一类具有外部干扰和模型不确定性的二阶欠驱动系统的跟踪控制问题。通过在滑模面中添加积分项,不仅保证了系统状态能够在有限时间内收敛至平衡点,且避免了奇异现象,引入含有非线性项的趋近律,使得系统能够在有限时间内到达滑模面,通过齐次性理论和有限时间Lyapunov稳定性理论证明了系统全局有限时间收敛。通过RBF神经网络去逼近模型不确定性和外部扰动,采用自适应控制设计更新律实时调节RBF神经网络的权值,从而提高控制器的控制精度。
2. 系统描述
针对一类二阶欠驱动系统:
(1)
其中 为系统状态变量, , , , 为非线性函数,u为系统的控制输入, , 为系统受到的总扰动,包括模型的不确定性和外部扰动。系统误差定义为:
(2)
假设1:非线性函数 , 不等于零。
假设2:假设系统所受到的不确定干扰是有界的,即 , 为常数。
引理1 [13] [14] :设 为一阶连续可导,且当 时有极限,则如果 一致连续,那么 。
引理2 [15] [16] :若向量函数 是齐次的,且 ,假设原点为全局渐进稳定的平衡点,那么原点是系统 的有限时间稳定平衡点。
3. 控制器设计
本文的目的就是采用有限时间稳定性理论和分层滑模控制原理设计一个适当的控制律u使得系统(1)的状态跟踪到期望轨迹,采用RBF神经网络对系统(1)的扰动进行逼近补偿提高控制器的鲁棒性,图1为控制系统的结构框图。

Figure 1. System control framework
图1. 系统控制框架
3.1. 滑模控制器设计
定义第一层滑模面为:
(3)
(4)
其中, , , , , , , , , 为正常数。由等效控制法可得两个子系统的等效控制律为
(5)
(6)
第二层滑模面为
(7)
其中, 为常数。取趋近律为 [17]
(8)
其中 为正常数,且 , 。为了保证系统的两个状态变量能够沿着各自的滑模面稳定滑动,系统的控制输入量包含了在每个子滑模面上的等效控制量。为了使系统能够在动态的情况下在总滑模面上维持渐进稳定,需要引入切换控制部分 ,即
(9)
此时,切换控制律为
(10)
则总控制律为
(11)
令Lyapunov函数为
(12)
求导,并将控制律u代入得
(13)
3.2. 神经网络滑模控制器设计
为了保持较好的抗干扰性能,滑模控制器的设计过程中一般会选择较大的切换项来抵消干扰项d,但是随着切换项的增大,抖振增大。使用神经网络算法和自适应控制算法对控制输入进行在线调节,不仅可以保留滑模控制的鲁棒性,也在一定程度上减小抖振。RBF网络输入输出算法为:
(14)
, (15)
其中, 为网络输入, 为隐藏层的第j个神经元的输出, 为第j个隐藏神经元的中心矢量值, 为隐藏层神经元j的高斯函数的宽度; 为理想网络权值向量, 为神经网络的逼近误差,且 。
网络输入为 ,则网络输出为
, (16)
其中 , 为估计权值。令
(17)
(18)
其中 , 为神经网络的权值误差。控制律为
(19)
其中 ;取自适应律为
, (20)
4. 稳定性证明
4.1. 渐进稳定性证明
定理1:对于式(1)所示的欠驱动系统,如果分别按式(3)、式(4)和式(7)设计的各级子滑模面,并且采用式(19)所示的控制律,则系统的滑模面S, , 是渐进稳定的。
证明:取Lyapunov函数为
(21)
求导并将式(20)代入可得
(22)
结合式(21)可知 ;由Lyapunov定理可知,系统是稳定的。对上式两边对t求积分可得:
(23)
则
(24)
由式(7)可知,当 时,有
(25)
由于 , ,此时可知当 时, ,求极限得
(26)
则根据引理1,可得当 时 ,可证得系统是渐近稳定的。由于总滑模面为两个子滑模面的线性组合,则在保证总滑模面渐进稳定时,神经网络并不会影响到子滑模面的稳定性,因此子滑模面也是渐进稳定的。
4.2. 全局有限时间稳定性证明
滑模控制在控制过程中一般有两个阶段:趋近阶段和收敛阶段,因此分两个步骤证明整个控制系统的有限时间稳定性。
定理2:对于系统(1),选用滑模面(3),(4),(7)和控制律(19)时,系统的跟踪误差是全局有限时间内收敛。
证:1) S-有限时间稳定:由式(8)可有
(27)
求导得
(28)
其中, , 。因此,系统在趋近阶段能够在有限时间内到达滑模面。
2) x-有限时间稳定:当 , 时,有 ,此时系统是全局有限时间收敛到零。
证明:以 为例,由于 ,则有 ,令
(29)
则有
(30)
由齐次性定义可得
(31)
由上面两式可得
(32)
令 ,可得 , ,此时系统为齐次系统。取Lyapunov函数
(33)
对 求导得
(34)
当 时,可得 。可得通过lasalle原理 [18] 可知,第一个子系统系统是渐进稳定的。由引理2可得第一个子系统状态 是有限时间稳定的。同理第二个子系统状态 也是有限时间稳定,则可得整个欠驱动系统状态的跟踪误差在收敛阶段为有限时间收敛。此时可知系统在趋近阶段和收敛阶段都是有限时间稳定。
5. 仿真结果及其分析
将单摆式架空起重机系统作为仿真实例,图2为起重机结构图,转化为状态空间模型(1)后,系统函数 , , , 的具体表达式为

Figure 2. Crane structure diagram
图2. 起重机结构图
, , ,
其中,小车的位置,速度,摆角,摆角速度为 。系统的各个参数来自文献 [12] ,即 , , , ,初始状态变量为 ,理想状态变量为 。首先,在不存在外部干扰的情况下,分别采用全局有限时间分层滑模控制(GFHSMC),双终端滑模控制(HDSMC) [12] 和分层滑模控制(HSMC) [19] ,在保持系统参数一致的
同时,FHSMC控制器参数为 , , , , , , , ,
, , , , , , , 。HSMC控制器的参数与FHSMC一致;HDSMC控制器的参数选取为原文献的参数。
图3是系统状态变量的误差轨迹,可以看出GFHSMC控制器下的系统误差在5~10秒内收敛于零,另外两个控制器在10 s后收敛到稳定状态,且GFHSMC的摆动角振幅小于另外两个控制器的。图4为控制输入曲线,GFHSMC的输入曲线变化缓慢,另外两个控制器有较大的抖动现象。图5为每层滑动面的收敛趋势。可以看出,由于HDSMC存在个奇异点,所以出现了较大的抖振。GFHSMC在有限时间内收敛到平衡状态,保持较快的收敛速度和稳定的收敛趋势。
在有外部扰动和模型不确定性的情况下,采用了基于RBF神经网络有限时间分层滑模控制和自适应分层滑模控制 [8] 对单摆式架空起重机系统进行控制;其中神经网络参数为: ,
, ,其他参数与无外部干扰和模型不确定性的情况下一致;
外部扰动为 ;在外部扰动存在时,摆角控制在了一个较小的范围内波动。图6为存在外界干扰作用下系统误差的收敛曲线。可以看出本文控制器(RBF-FHSMC)下的误差幅度小于AHSMC控制器下的误差幅度,且它能快速收敛到稳定状态。在RBF-FHSMC控制器下的负载的摆动角振幅不仅很小,而且收敛速度快。图7为外部干扰下的控制输入曲线。图8为外界扰动作用下各级滑动面的收敛曲线。RBF-FHSMC控制器的滑动表面具有较小的颤振,并在5秒内达到稳定状态。
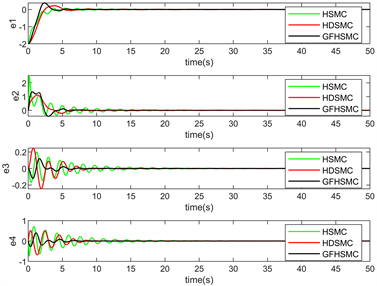
Figure 3. Systematic error curve without disturbance
图3. 无干扰下的系统误差曲线

Figure 4. System control signal curve under no interference
图4. 无干扰下的系统控制信号曲线
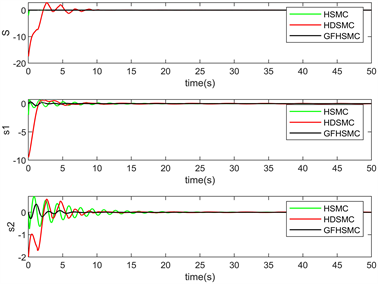
Figure 5. Sliding surface curve of the system without disturbance
图5. 无干扰下的系统滑模面曲线

Figure 6. System error curve in the presence of external disturbances
图6. 存在外部干扰下的系统误差曲线

Figure 7. System control signals in the presence of external interference
图7. 存在外部干扰下的系统控制信号
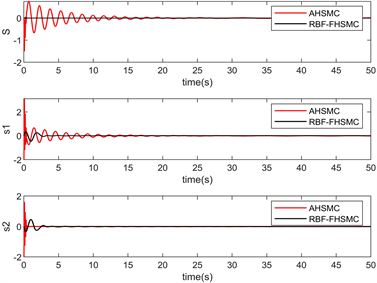
Figure 8. Sliding surface profile of the system in the presence of external disturbances
图8. 存在外部干扰下的系统滑模面曲线
6. 总结
针对欠驱动系统,将系统作为两个单独的子系统,分别建立子滑模面,通过对子滑模面的线性组合得到系统的总控制输入,从而完成对欠驱动系统的控制。该控制方案可以保证系统状态在有限时间内趋近滑模面的同时也能够在有限时间内收敛到原点,达到一个全局有限时间收敛的目标。该控制器不仅避免了奇异性的出现,而且能够在一定程度上消除抖动,通过RBF神经网络提高了系统的鲁棒性。最后通过对单摆式架空起重机进行数值模拟实验,验证了该方法的有效性。本文所研究的欠驱动模型具有普遍的适用性,例如倒立摆,水下机器人,四旋翼无人机等,且控制器能够保证系统在有限时间内稳定。
文章引用
王 蓉,刘永春,刘 鑫. 一类二阶欠驱动系统的自适应有限时间滑模控制
Adaptive Finite-Time Sliding Mode Control for a Class of Second-Order Underactuated Systems[J]. 建模与仿真, 2023, 12(02): 677-688. https://doi.org/10.12677/MOS.2023.122064
参考文献
- 1. 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418.
- 2. Zhu, G. and Du, J. (2020) Robust Adaptive Neural Practical Fixed-Time Tracking Control for Uncertain Euler-Lagrange Systems under Input Saturations. Neurocomputing, 412, 502-513. https://doi.org/10.1016/j.neucom.2020.05.057
- 3. Feng, H., Song, Q., Ma, S., et al. (2022) A New Adaptive Sliding Mode Controller Based on the RBF Neural Network for an Electro-Hydraulic Servo System. ISA Transactions, 129, 472-484. https://doi.org/10.1016/j.isatra.2021.12.044
- 4. 邢文琪, 郭旭东, 肖建如, 郝又国, 贺全森. 下肢外骨骼助行机器人神经网络自适应滑模控制研究[J]. 建模与仿真, 2022, 11(2): 288-296.
- 5. Rahmani, M., Komijani, H. and Rahman, M.H. (2020) New Sliding Mode Control of 2-DOF Robot Manipulator Based on Extended Grey Wolf Optimizer. International Journal of Control, Automation and Systems, 18, 1572-1580. https://doi.org/10.1007/s12555-019-0154-x
- 6. Chen, L., Wang, H., Huang, Y., et al. (2020) Robust Hierarchical Sliding Mode Control of a Two-Wheeled Self-Balancing Vehicle Using Perturbation Estimation. Mechanical Systems and Signal Pro-cessing, 139, Article ID: 106584. https://doi.org/10.1016/j.ymssp.2019.106584
- 7. Do, V.-T, Lee, S.-G. and Van, M. (2021) Adaptive Hierarchical Sliding Mode Control for Full Nonlinear Dynamics of Uncertain Ridable Ballbots under Input Saturation. International Journal of Ro-bust and Nonlinear Control, 31, 2882- 2904. https://doi.org/10.1002/rnc.5423
- 8. Zhang, Y., Zhao, X. and Wei, X. (2020) Robust Structural Control of an Underactuated Floating Wind Turbine. Wind Energy, 23, 2166-2185. https://doi.org/10.1002/we.2550
- 9. Dai, K., Zhu, Z., Tang, Y., et al. (2021) Position Synchronization Tracking of Mul-ti-Axis Drive System Using Hierarchical Sliding Mode Control. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 43, Article No. 204. https://doi.org/10.1007/s40430-021-02906-9
- 10. Zhang, H., Xu, N., Zong, G. and Alkhateeb, A.F. (2021) Adaptive Fuzzy Hierarchical Sliding Mode Control of Uncertain Under-Actuated Switched Nonlinear Systems with Actuator Faults. International Journal of Systems Science, 52, 1499-1514. https://doi.org/10.1080/00207721.2020.1831645
- 11. Yang, W., Chen, J., Xu, D. and Yan, X. (2021) Hierarchical Global Fast Terminal Sliding-Mode Control for a Bridge Travelling Crane System. IET Control Theory and Applications, 15, 814-828. https://doi.org/10.1049/cth2.12083
- 12. Ma, Z. and Sun, G. (2018) Dual Terminal Sliding Mode Control Design for Rigid Robotic Manipulator. Journal of the Franklin Institute, 355, 9127-9149. https://doi.org/10.1016/j.jfranklin.2017.01.034
- 13. Hong, Y., Xu, Y. and Huang, J. (2002) Finite-Time Control for Robot Manipulators. Systems & Control Letters, 46, 243-253. https://doi.org/10.1016/S0167-6911(02)00130-5
- 14. Slotine, J.-J. and Li, W. (1991) Applied Nonlinear Control. Prentice Hall, Hoboken.
- 15. Polyakov, A. (2011) Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Transactions on Automatic Control, 57, 2106-2110. https://doi.org/10.1109/TAC.2011.2179869
- 16. Bhat, S.P. and Bernstein, D.S. (2005) Geometric Homogeneity with Ap-plications to Finite-Time Stability. Mathematics of Control, Signals and Systems, 17, 101-127. https://doi.org/10.1007/s00498-005-0151-x
- 17. Moulay, E., Léchappé, V., Bernuau, E. and Plestan, F. (2021) Robust Fixed-Time Stability: Application to Sliding Mode Control. IEEE Transactions on Automatic Control, 67, 1061-1066. https://doi.org/10.1109/TAC.2021.3069667
- 18. Wu, D., Zhang, W., Du, H. and Wang, X. (2021) Robust Adaptive Fi-nite-Time Trajectory Tracking Control of a Quadrotor Aircraft. International Journal of Robust and Nonlinear Control, 31, 8030-8054. https://doi.org/10.1002/rnc.5743
- 19. Qian, D. and Yi, J. (2016) Hierarchical Sliding Mode Control for Under-Actuated Cranes. Springer, Berlin. https://doi.org/10.1007/978-3-662-48417-3