Advances in Marine Sciences
Vol.
06
No.
02
(
2019
), Article ID:
31008
,
6
pages
10.12677/AMS.2019.62010
Land Sea and Air Integrated Surveying and Mapping Technology
Jisheng Ding, Yilan Chen*, Long Yang, Yikai Feng
First Institute of Oceanography, MNR, Qingdao Shandong

Received: Jun. 5th, 2019; accepted: Jun. 20th, 2019; published: Jun. 27th, 2019

ABSTRACT
With the development of science and technology, space geographic information acquisition equipment and means are becoming more and more advanced. Multibeam full coverage measurement, three-dimensional laser scanning measurement and UAV aerial measurement represent the more common and advanced technology methods for acquiring underwater, land and spatial location information data respectively. The integration of these measuring devices to form an integrated three-dimensional space stereo measurement system is a hot spot in the future. This paper introduces the composition, implementation method and measurement effect of Multibeam Bathymetric system, ship-borne three-dimensional laser scanning and UAV aerial surveying integrated three-dimensional surveying and mapping system. The results show that the Multibeam Bathymetric System and ship-borne three-dimensional laser scanning system can achieve synchronization on the premise of ensuring the accuracy of peripheral auxiliary equipment and the accuracy of system installation and calibration. Volume stereo measurement and UAV aerial measurement, as aerial survey means, can effectively compensate for the missing measurement data of multibeam and three-dimensional laser because of their wide field of vision and high density of measurement points. The three measurement techniques are effectively combined to provide the spatial position information of underwater and water objects for the surveyors, and to achieve high-density data point cloud and no omission topographic survey.
Keywords:Multibeam Echo Sounder, 3D Laser Scanning, Unmanned Air Vehicle Measurement System, Integrated Mapping
陆海空一体化立体测绘技术
丁继胜,陈义兰*,杨龙,冯义楷
自然资源部第一海洋研究所,山东 青岛

收稿日期:2019年6月5日;录用日期:2019年6月20日;发布日期:2019年6月27日

摘 要
随着科技的发展,空间地理信息获取设备及手段也越来越先进。多波束全覆盖测量、三维激光扫描测量及无人机航空测量则分别代表了目前水下、陆地和空中空间地理位置信息数据获取的较为常用和先进的技术方法,而将这几种测量设备进行技术集成,形成一体化立体空间测量系统,是未来一个应用热点。本文结合测量实例,介绍了多波束测深系统、船载三维激光扫描和无人机航空测量一体化立体测绘系统组成、实现方法及测量效果,结果显示,在保证外围辅助设备精度和系统综合安装及校准精度的前提下,多波束测深系统和船载三维激光扫描系统可以实现同步一体化立体测量,而无人机航空测量,作为空中俯视测量手段,由于其视野广阔,测点密度大,可以有效弥补多波束和三维激光所遗漏的测区测量数据,三种测量技术有效组合,为测量者完美提供水下及水上目标物空间位置信息,真正实现高密度数据点云扫描无遗漏地形测量。
关键词 :多波束测深系统,三维激光扫描系统,无人机测量系统,一体化测绘

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
多波束条带测深技术自从20世纪60年代开始研发 [1] ,到70年代投入实际使用,到目前,已经发展成了海洋测绘领域一种主导技术手段,技术指标和测量效果也达到了一个空前的高度。激光扫描测量技术是20世纪90年代开始广泛应用的一种测量技术 [2] ,最多使用的是LiDAR (Light Detection And Ranging)测量系统,既利用机载激光测量系统,实现对目标物的地理位置信息的快速获取。在将多波束测深系统与激光扫描系统成功进行组合,实现同步立体测量之前,测量者要实现同样的测量效果,必需针对实际测量区域和测量要求,分别进行多波束全覆盖水深测量和水上部分目标物(岸滩、码头、岛礁或者其他水上建筑物)三维激光扫描测量,完成各自的数据处理之后,利用合适数据处理方法将两种测量数据进行融合 [3] 。这不仅要花费更多的人力、物力和财力,而且由于是各自在不同测量载体平台独自进行数据采集,较多的测量进程,特别是各自采用独立的定位及姿态测量系统,会给最终的测量成果带来更多的误差源,从而影响测量结果的准确度。
近些年,随着各项技术发展,一些设备生产厂商开始尝试为客户提供多波束测深系统和三维激光扫描系统同步测量技术方案,并取得了成功应用 [4] [5] 。在这些成功进行商业应用推广的案例中,丹麦Reson公司和荷兰QPS公司都结合相关的硬件测量设备给出了自己的技术集成方案,并将这些方案成功集成到各自的专业海洋测量软件中。在过去的几年,相关设备代理商也在国内进行过技术展示和推广,展示了多波束测量系统和船载激光扫描测量系统一体化同步测量技术。
多波束水下扫测和船载激光扫描同步测量,虽然有效解决了二者水陆分界线的地形数据有机拼接,但是由于船载激光对水上部分只能进行侧向扫测,因此,对于被扫测对象顶部的区域容易造成扫测盲区。我国自2009年发展起来的小型无人机航空测量技术手段 [6] 对被测对象实现空中俯视扫测,可以有效弥补以上技术缺陷,从而真正实现水上水下无遗漏高精度地形测量,这种无人机航空测量技术也得到了广泛应用 [7] [8] [9] 。
本文将Seabat7125多波束测深系统、Optech ILRIS-LR激光扫描测量系统、Pos MV320惯性导航系统、拓普康Sirius无人机测量系统及控制采集软件PDS2000等子系统组进行技术组合,实现多波束和船载激光扫描同步测量;另一方面,利用无人机测量系统进行空中俯视测量,完成部分高点盲区及激光遮挡区域的地形补测,真正实现陆海空载一体化立体测量,测量结果显示,该组合系统可以实现岛屿或者岸滩周边水上水下无遗漏高精度立体测绘,同时提高测量效率,节约测量成本。
2. 系统介绍
为了实现水下和水上目标同步测量,集成系统中,除了最基本的多波束条带测深仪、三维激光扫描系统和无人机测量系统之外,高精度定位、姿态测量系统及控制采集软件也是不可或缺的组成部分(系统组成框图如图1所示)。特别是定位姿态部分,直接关系到系统集成的成功与否和最终的数据质量。定位及姿态测量系统向三维激光测量系统和多波束测深系统同步提供位置及姿态信息,并由自身输出的1 PPS同步脉冲控制多波束测量和激光测量位置和姿态的严格同步,保证测量结果准确性。另外,为了最大限度实现水下、水上部分无缝地形拼接,多波束换能器要进行倾斜安装。

Figure 1. System composition block diagram
图1. 系统组成框图
多波束测量系统、三维激光扫描系统及无人机航空测量的成功组合,为测绘工作者提供了一种新的测量模式,不仅可以同时实现水下、水上同步测量,更为重要的是由于激光扫描仪和无人机的成功应用,可以快速实现常规测量方法难以实现的一些困难测量区域的地理信息获取,比如测量人员无法进入的滩涂测量、无人海岛及其他难以到达的海上其他构筑物测量等。
3. 应用测量实例
为了验证几种不同测量技术手段的组合应用,在山东千里岩海域,进行了相关测量技术应用验证测量实验,过程及测量结果如下。
3.1. 测量设备及软件
测量过程中,使用了系统集成及供应商推荐使用的硬件设备及软件系统,包括:SeaBat7125多波束测深系统;Optech ILRIS-LR三维激光扫描系统;拓普康Sirius无人机测量系统;POS MV320惯性导航及姿态测量系统;拓普康实时动态差分定位系统;PDS2000海洋综合测量软件;Fledermaus 3D海量数据融合处理及可视化系统。
在所使用的设备中,各子系统都代表了所在领域领先的测量技术水平。三维激光扫描仪最大扫描距离大于3000 m,适合用于近海作业。而POS MV320惯性导航及姿态测量系统,在有RTK提供辅助差分信号的情况下,在后处理之后,可以使Roll、Pitch测量精度达到0.008˚,这对于保证一体化测量系统综合测量准确度来说至关重要。
3.2. 系统安装及校准
与大部分移动测量设备类似,为了保证测量准确度,多波束测深与三维激光扫描一体化移动测量系统也要进行正确的安装并进行严格的系统校准。相对于多波束测深系统,移动激光扫描系统对测量时自身姿态变化更为敏感,因此对姿态测量系统测量准确度要求更高。为了达到测量要求,系统集成方案选择了将激光扫描系统与姿态测量系统刚性连接在同一个金属安装架上(参见示意图2),使两个系统在三维空间相对位置严格一致,保证了姿态系统所输出的姿态信息准确的反应三维激光扫描系统的变化。多波束测深系统安装,与单独多波束测深系统安装要求相同。为了使水下多波束扫测范围和船载三维激光扫测范围最大限度实现无缝接边,多波束换能器采取朝向激光扫描的方向倾斜40˚方式安装。
安装后的系统校准,需要针对多波束测量系统和三维激光扫描系统分别进行,二者的校准要素基本相同,差异是对于激光扫描系统来说,因为安装时采取了与姿态系统严格一致的同一个基座的刚性连接方式,并使二者指向严格一致,因此校准要素不包含Heading校准。在校准特征地形选择上,最好选择水面有一定高度的灯塔或者其他柱状物体作为激光扫描系统的校准特征参照物,完成激光扫描系统安装误差校准。多波束测深系统校准,按照常规校准方法和校准要素,选择合适的水下地形区域进行相关要素校准。

Figure 2. Installation diagram of laser scanner and inertial navigation and attitude measurement system
图2.激光扫描仪与惯性导航及姿态测量系统安装示意图
3.3. 数据采集及处理成果
安装校准完成之后,对千里岩海岛及周边海区进行了一体化测量,同步采集多波束水深地形数据和水面以上的三维激光扫描数据,之后利用无人机测量系统对海岛进行低空全覆盖测量。利用PDS2000对采集的激光扫描和多波束测量一体化测量数据进行了精细处理,得到对应测量点位置及高程点云数据,利用fledermaus软件的三维空间处理功能对数据进行融合和三维空间再现(处理及显示流程如图3所示),获得水下及水上综合三维空间DEM。
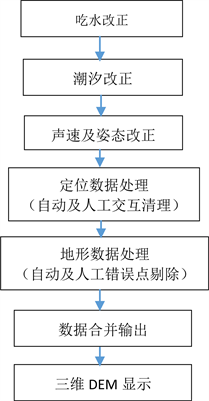
Figure 3. Data processing and display flow chart
图3.数据处理及显示流程图
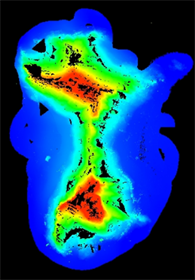
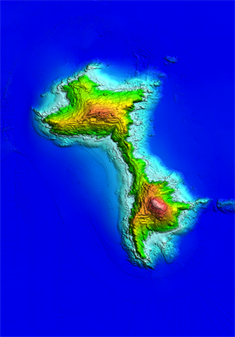
从处理及显示结果图,可以清晰看出水下地形分布及水上建筑物空间位置状况,参见图4所示。从图4(a)可以看出,由于激光扫描为水平方向对海岛扫描,致使部分区域由于遮挡或者其他因素,造成测量盲区;而无人机空中俯视测量,则很好的弥补了了激光扫描的不足之处,完全实现了水面之上海岛全覆盖测量,经过与多波束及激光扫描数据融合,获取了海岛周边水下及水上全覆盖高分辨率地形数据(参加图4(c))。
 (a)
(a)
 (b)
(b)
 (c)
(c)
Figure 4. (a) Survey of seafloor and island topography by multi-beam and laser; (b) Aerial survey image result of unmanned aerial vehicle; (c) Survey fusion results of multi-beam, laser and UAV
图4. (a)多波束及激光同步测量水下及海岛地形结果;(b)无人机空中测量影像结果;(c)多波束、激光及无人机测量融合结果
4. 问题及结论
从本次测量试验结果看,陆海空立体测量技术可以实现互补测量,取长补短,真正实现海岛礁及海岸带等困难测量区域的全覆盖无遗漏的地形测量,并一定程度上提高测量精度,是目前及今后测量领域的一大热点研究及应用方向。
从本次的测量试验过程及结果分析得知,影响组合陆海空立体测绘系统测量精度的主要因素包括如下几个方面 [10] :1) 各子系统自身测量精度。为了提高立体测绘系统的整体测量精度,各子系统的选择尽量满足较高的自身测量精度要求,特别是惯性导航系统,其动态姿态变化测量精度要优于0.015˚,以满足三维激光扫描长距离扫描精度需求;2) 组合系统的安装精度。各子系统在安装过程中,严格按照设备使用说明进行安装,并精确测量各传感器之间的相对偏移距离,以满足精确的位置及姿态动态改正要求。3) 多波束测深系统及三维激光扫描系统的安装误差校准过程。该过程也是影响组合系统最终测量精度的一个非常重要的因素,为了达到最终测量精度要求,需要操作者严格按照设备生产商推荐的安装校准程序,并选择合适的特征地形地物,对系统安装误差进行动态校准。
为了保证水下测量和水上激光扫描完美接边,多波束换能器要采取倾斜安装,并要保证后续校准精度;另外,激光扫描距离较远,为了保证足够精度,要采取足够高精度外围姿态设备(姿态测量精度优于0.01˚),并保证正确的安装校准精度。在以上条件下,组合了多波束测深系统和三维激光扫描一体化测量系统,可以实现水下及水上目标物快速同步获取,为测量者提供一种全新测量手段,可以广泛应用于海岸带滩涂、码头、海岛礁及其他近岸测量,并可以实现一些以往测量方式不可能实现的困难测量区域的快速、高效测量。
基金项目
国家重点研发计划项目资助,项目编号:2017YFC0306003。
文章引用
丁继胜,陈义兰,杨 龙,冯义楷. 陆海空一体化立体测绘技术
Land Sea and Air Integrated Surveying and Mapping Technology[J]. 海洋科学前沿, 2019, 06(02): 93-98. https://doi.org/10.12677/AMS.2019.62010
参考文献
- 1. 周兴华, 等. 浅水多波束勘测技术研究[R]. 青岛: 国家海洋局第一海洋研究所, 1999.
- 2. 刘经南, 张小红. 激光扫描测高技术的发展与现状[J]. 武汉大学学报(信息科学版), 2003, 28(2): 132-137.
- 3. Parrott, D.R., Todd, B.J., Shaw, J., et al. (2008) In-tegration of Multibeam Bathymetry and LiDAR Surveys of the Bay of Fundy, Canada. Proceedings of the Canadian Hydrographic Conference and National Surveyors Conference 2008, Wolfville, Nova Scotia, Canada, November 2008, 1-15.
- 4. Kingham, K. (2017) Combining Multibeam Systems & Laser Scanning Data. http://www.riegl.com/fileadmin/user_upload/Press/Combining_Multibeam_Systems___Laser_Scanning_Data_Reason.pdf
- 5. Conforti, D. (2019) Combined Laser/Multibeam sonar survey of Sydney harbor. https://www.video.teledynemarine.com/video/13403592/combined-lasermultibeam-sonar-survey-of-sydney
- 6. 毕凯, 李英成, 丁晓波, 等. 轻小型无人机航摄技术现状及发展趋势[J]. 测绘通报, 2015(3): 27-31+48.
- 7. 段柏文. 无人机航空测量在地形测绘中的应用[J]. 资源信息与工程, 2018, 33(2): 135-136.
- 8. 刘德正. 无人机航空摄影测量在地形图测绘中的应用[J]. 学术前沿, 2017(5): 241+244.
- 9. 段隆辉. 无人机航空摄影测量在小区域测绘中的应用研究[J]. 装备制造技术, 2018(7):140-142.
- 10. Dix, M.E. (2010) Accuracy Evaluation of Terrestrial LiDAR and Multibeam Sonar Systems Mounted on a Survey Vessel. Master’s Thesis, University of Florida, Gainesville, FL.
NOTES
*通讯作者。