Modeling and Simulation
Vol.
13
No.
01
(
2024
), Article ID:
80290
,
9
pages
10.12677/MOS.2024.131089
基于自适应参数的VMD-SVM谐振接地系统 故障选线方法
李志明1,刘晓波1,陈再航2
1贵州大学电气工程学院,贵州 贵阳
2贵州电网有限责任公司遵义供电局,贵州 遵义
收稿日期:2023年12月18日;录用日期:2023年12月28日;发布日期:2024年1月31日

摘要
为解决谐振接地系统单相接地故障对故障初始角为零以及接地电阻为高阻的故障线路识别效果差的问题,提出一种自适应优化VMD参数(WOA-WOA)的选线方法。该方法通过Matlab/Simulink对小电流接地系统进行仿真,采集瞬时零序电流数据,将数据输入经优化参数后的VMD算法中进行信号分解,提取分解后的高频分量数据,将其输入进单一的支持向量机模型以及经鲸鱼算法优化后的支持向量机模型进行对比,结果表明VMD-WOA-SVM模型有着更好的选线准确度与选线效率。
关键词
故障选线,瞬时零序电流,信号分解,鲸鱼优化算法,支持向量机

Adaptive Parameter-Based Fault Routing Method for VMD-SVM Resonant Grounding System
Zhiming Li1, Xiaobo Liu1, Zaihang Chen2
1School of Electrical Engineering, Guizhou University, Guiyang Guizhou
2Zunyi Power Supply Bureau of Guizhou Power Grid Co., Ltd., Zunyi Guizhou
Received: Dec. 18th, 2023; accepted: Dec. 28th, 2023; published: Jan. 31st, 2024

ABSTRACT
In order to solve the problem of poor identification of single-phase ground faults in resonant grounding earth systems for fault lines with zero initial angle of the fault and high resistance to earth, an adaptive optimization of VMD parameters (WOA-WOA) is proposed as a wire selection method. The method simulates the small current grounding system through Matlab/Simulink, collects the instantaneous zero-sequence current data, inputs the data into the optimized VMD algorithm to decompose the signal, extracts the decomposed high-frequency component data, and inputs them into a single support vector machine model and the optimized whale algorithm to compare the results. The results show that the VMD-WOA-SVM model has better line selection accuracy and efficiency.
Keywords:Fault Routing, Instantaneous Zero Sequence Current, Signal Decomposition, Whale Optimization Algorithm, Support Vector Machine

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
当谐振接地系统发生单相接地故障时,系统的接地电流较小,此时整个系统以及设备并不会受到很大的损坏,为了减少突然停电对用户造成的损失,允许系统在故障情况下继续运行1~2小时 [1] 。若长时间不处理故障,就会造成系统过电压,给系统带来巨大的危害,所以当系统发生单相接地故障时,如果能够及时对故障线路进行选择并维护,就可以减少系统危害,因此故障选线具有重大意义。
目前关于单相接地故障选线方法可分为信号注入法 [2] 、稳态法 [3] 以及暂态法 [4] - [9] 。改变接入配电网逆变器的调制策略,使得逆变器向配电网短时注入特征信号。文献 [2] 借助配电网广泛分布的零序电流测量装置对零序电流分析,比较各测量点特征信号能量来完成选线,但注入信号的方法需要安装额外硬件,实现较困难,故未被广泛应用。文献 [3] 通过比较单相接地故障后,在消弧线圈不同补偿度时的线路零序电流的差别,识别出故障线路,若接地故障线路的接地故障电流太小或负载不平衡,选线可能不正确。发生小电流接地故障时,系统产生的暂态信息量要远远大于稳态信息量,因此暂态法具有明显优势。目前对暂态信息的处理方法主要有Prony [4] [5] ,EMD法 [6] [7] ,小波分析法 [8] [9] 等。文献 [5] 利用扩展Prony算法提取各线路零序电流的工频幅值与相位,然后比较其值选出故障线路,但Prony方法对噪声敏感从而导致辨识精度不高。文献 [6] 提出一种基于改进EEMD与GA-BP神经网络的故障选线方法,解决了单一特征作选线判据不精准的问题,在夹杂噪声以及高阻接地情况均能准确、快速进行故障选线,但其依赖于实际样本数量,选线精度并不是很高。文献 [8] 利用小波包变换从零序电流中提取暂态特征值,并且作为GA-SVM的输入特征进行训练,用训练好的SVM对测试集进行检测,得到选线结果,但只考虑了低频段特征,信息利用率低。
针对上述存在的不足,本文利用零序电流进行分析,采用改进后的自适应VMD算法提取零序电流,提取分解后的高频分量,再通过鲸鱼算法改进的SVM,提高选线模型的选线准确度,最后通过VMD与SVM的结合准确选出故障线路。
2. 理论基础
2.1. 变分模态分解(VMD)
VMD (Variational Mode Decomposition)是一种信号分解方法,其原理基于变分模态分解,能够将非平稳信号分解为一系列模态函数和残差余项,从而揭示不同频率的信号成分,其能够有效避免信号处理过程中的过分解或者欠分解等问题,具有良好的分解效果。
2.2. 支持向量机
支持向量机(Support Vector Machine, SVM),是一个二维的线性分类器。其原理寻找一个最佳平面,使得不同的两类样本到该平面上的间隔最大(差异最大化),达到分类目的。对于故障选线问题来说,将故障线路与非故障线路两个类别作为SVM模型的输出,进而达到选线目的。
其基本原理如下:
设 为训练样本集,其中 为具有多个特征(属性)的训练数据, 且 就是 对应的样本类型(即样本标签)。设 为最佳平面,其中最佳平面法向量 为分类面的权系数,常数项b为分类阈值。
对于线性不可分的问题,由线性优化理论知,可以将寻找最佳平面的问题转化为约束优化问题。最小目标函数为式(1):
(1)
式中:C为惩罚因子;ξ为松弛因子,用以防止过拟合问题;
对于非线性分类,SVM引入了核函数 ,一个合适的分类器与一个准确的核函数对于SVM分类问题来说非常的重要。本文最终选取径向(RBF)核函数,公式如(2):
(2)
式中:g (gamma)为核参数。
引入核函数后得到与其对应的最佳分类面决策函数如(3):
(3)
式中:α为拉格朗日乘子。
本文将故障线路与非故障线路作为两类(−1为故障线路,1为非故障线路),通过SVM对VMD分解后的零序电流进行训练与测试,最终达到选线目的。
2.3. 鲸鱼优化算法
鲸鱼优化算法(whale optimization algorithm, WOA)是由MIRJALILI等人于2016年提出的一种模拟座头鲸捕猎行为的元启发式优化算法,是一种比较新型群智能优化算法。主要包括搜索猎物、包围目标和螺旋泡网捕食策略三个阶段。其算法流程图如图1所示。
首先假设猎物处于海中的某个位置,当鲸鱼发现该猎物位置时,认为当前猎物所在位置就是最优解或者接近最优解,鲸群中的所有鲸鱼均会向着当前猎物所在方位进行游动,进而形成包围猎物的状态。即每个鲸鱼都会随着猎物所在位置实时地改变自己的游动方向,而面对其他搜索点,它们试图会朝着最优的搜索点改变自己的方向。该过程可由式4进行描述。

Figure 1. WOA algorithm flow
图1. WOA算法流程
(4)
式中, 为当前位置的解向量, 为当前位置的最优解, 为位置向量, 为迭代次数。 为 范围内的任意向量, 为控制参数,它会随着迭代次数的不断增加从数值2线性地降低为0。包
围鱼群后,鲸群便会朝着目标鱼群进行“气泡攻击”,形成泡网并使得目标鱼群无法逃出鲸鱼的掌控范围,随后鲸群会采取收缩包围的或者螺旋游走的方式对目标鱼群进行捕猎,该过程就相当于寻优过程。
1) 收缩包围
首先依据 实现对猎物的收缩包围。当系数 时,鲸群中的个体会朝着最优解所在位置进行直线游动。同时在该前提下,当 越接近于1,鲸群中的个体在游走过程中就会以越大的跨度方式进行鱼群的搜索,提高WOA算法全局寻优的能力。当 的值越远离于1,鲸群中的个体在游走过程中就会以一个越小的跨度方式进行鱼群的搜索,提高了WOA算法的局部寻优能力。
2) 螺旋游走
采取螺旋游走的方式鲸群便能够更加仔细地对目标猎物进行捕获,极大地增加了WOA算法在整个过程的局部寻优能力,其过程可用以下式(5)进行描述:
(5)
式中, 是鲸群个体距离当前最好鲸鱼的距离向量,b是常数,l是属于[0, 1]之间一个随机向量, 是局部最优解。
为了更好完成捕食过程,WOA算法将引入两个[0, 1]之间的随机值p, q,其中p是为了更好地选择收缩包围或者螺旋游走捕食方式,q是为了对整个解空间中数据的分散程度进行衡量。当 时,表示整个鱼群集中分布,即可行解分布集中,此时鲸群将采取收缩包围的方式进行猎物捕食;当 时,表示整个鱼群分散分布,即说明可行解分布分散,此时鲸群将采取螺旋游走的方式进行猎物的捕食,q取值为0.5。该过程可用以(6)表达式进行描述:
(6)
根据上式可知,鲸鱼的游走方式由随机值p的大小决定。
3) 探索捕食
而为了跳出局部最优,使得WOA算法具有全局寻优能力,鲸群中的个体会进行交流与合作以实现信息共享,进而在更大范围内搜寻和捕获目标猎物。与收缩包围阶段不同是:当 时,鲸鱼个体将在整个解空间分布,每个鲸鱼个体都会进行猎物搜寻,鲸群中一旦有鲸鱼个体发现了猎物(即找到了可行解),则这个鲸鱼个体便是局部最优解,进而进入搜索包围与气泡攻击的过程。该过程使得WOA算法具有全局寻优能力,以式(7)数学表达式进行描述:
(7)
式中Xrbest为当前随机获得的最优解。
3. VMD参数优化

Figure 2. Parameter optimization chart
图2. 参数优化图
对于VMD分解算法,它的分解质量主要取决于分解层数K和惩罚因子α。若分解层数K过大时会过分解,造成模态混叠情况;较小的惩罚因子α可以更好地保留信号的细节信息,但可能导致分解结果不平滑,容易受到噪声的干扰;而较大的惩罚因子可以更好地抑制噪声,使结果更平滑,但可能会丢失一些细节特征。因此需要在综合考虑,进行权衡,根据具体情况来选取适当的惩罚因子。
本次选择使用鲸鱼优化算法来对VMD的参数进行优化。而参数优化的关键是选择适应度函数WOA对SVM进行参数寻优的主要步骤如图2所示,具体过程如下:
具体步骤如下:
1) 配电网发生接地故障时,采集各线路零序电流。
2) 初始化WOA的相关参数,并设置K、α参数范围。
3) 对零序电流信号进行VMD分解,并且使用样本熵作为适应度函数,当样本熵最小时,其所对应的参数最优。保留样本熵最小时候的参数组合和更新后的鲸鱼种群位置。
4) 将更新后的鲸鱼种群位置作为新一轮初始种群,重复迭代,直到超过所设定的最大迭代次数。
5) 输出最优鲸鱼个体及其对应的适应度。
4. VMD-WOA-SVM选线模型
类似WOA优化VMD参数,同样使用WOA对SVM进行参数寻优。具体过程如图3所示。

Figure 3. Parameter optimization chart
图3. 参数优化图
在确定好参数后,使用SVM进行分类选线,具体步骤如图4所示。

Figure 4. Line selection flowchart
图4. 选线流程图
5. 仿真验证与结果分析
为了验证本文故障先选方法的有效性,基于Matalab/Simulink建立了某110/10.5 kV变电所仿真模型,该模型共有L1、L2、L3、L4这4条线路。每条线路后接有负荷,容量依次为1、0.6、0.6、1 MW。消弧线圈补偿度设置为10% (过补偿方式),经计算得电感值为0.8105 H,电阻为7.639 Ω,如图5所示。
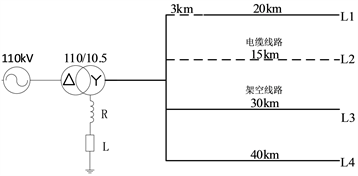
Figure 5. Simulation model of resonant grounding system
图5. 谐振接地系统仿真模型
5.1. 算法寻优测试
设线路L4在距离母线15 km处发生故障,其故障电阻为0.01 Ω,故障初始角为30˚,故障发生时间为0.02 s。取其零序电流作为分解测试函数,WOA算法初始种群设为20,迭代次数为20次,上界ub和下界l b分别为[5, 5000]和[2, 600]。测试如图6所示。

Figure 6. Iterative process
图6. 迭代过程
由图6可以得出WOA-VMD的适应度最优值出现在第8代为3.3968,并且在此时所取得的最优参数α和K分别为1811、3。
5.2. 案例分析
设L4分别在接地电阻为0.001 Ω、500 Ω、1000 Ω及2000 Ω,故障初始角为0˚、30˚、45˚、60˚及90˚,在距母线15%、30%、45%、60%及90%处故障,采样频率为10 kHz,分别采集各条线路在不同情况下发生故障后的瞬时零序电流。在经过VMD分解后提取每条线路的高频分量的20个数据,共获得4 × 5 × 5 × 4 = 400条瞬时零序功率样本,其中100条为故障数据,300条非故障数据。在非故障数据中抽取条60,故障数据中抽取20条,组成用来测试的样本矩阵。剩下的数据用来组成训练样本矩阵。将上诉两个矩阵作为VMD-WOA-SVM模型与SVM模型的输入,进行训练与预测分类。输出结果如图7所示。

Figure 7. VMD-SVM model line selection results
图7. VMD-SVM模型选线结果
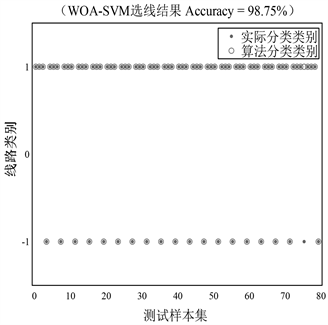
Figure 8. VMD-WOA-SVM model line selection results
图8. VMD-WOA-SVM模型选线结果
从图8输出结果可以看出VMD-SVM模型中有五条样本识别错误,即预测成功率只有93.75% (75/80)。而在VMD-WOA-SVM模型下,80条样本只有一条识别错误,即准确度为98.75% (79/80)。
6. 结论
本文提出了一种基于WOA算法改进的VMD-SVM的谐振接地系统故障选选线方法,该方法将零序电流经VMD分解后输入优化过的SVM模型中分类选线,实验结果表明,该方法能够快速准确地进行选线,选线精度高达98.75%,并且不受故障距离、故障初始角、以及接地电阻的影响。该方法在故障选线研究方面,具有一定意义。
文章引用
李志明,刘晓波,陈再航. 基于自适应参数的VMD-SVM谐振接地系统故障选线方法
Adaptive Parameter-Based Fault Routing Method for VMD-SVM Resonant Grounding System[J]. 建模与仿真, 2024, 13(01): 923-931. https://doi.org/10.12677/MOS.2024.131089
参考文献
- 1. 陈宏山, 石勇, 史泽兵, 董凯达, 陆明, 赵健龙. 小电流接地系统接地故障选线方法[J]. 电网与清洁能源, 2020, 36(5): 42-48+57.
- 2. 袁佳歆, 李响, 张哲维. 基于注入信号的有源配电网单相接地故障选线方法[J]. 电测与仪表, 2020, 57(5): 44-49.
- 3. 罗龙, 艾琳. 电流变量方法在小电流故障选线中的应用[J]. 华中电力, 2009, 22(2): 1-4.
- 4. 王晓卫, 吴继维, 李然月, 田书, 褚正超. 基于Prony相对熵的故障投票选线新方法[J]. 中国电力, 2013, 46(1): 59-64.
- 5. 王凯, 焦新兵, 王芝恩. 基于扩展Prony算法的煤矿电网单相接地故障选线方法[J]. 农业装备与车辆工程, 2019, 57(1): 105-107.
- 6. 韩祥民, 刘晓波, 刘敏, 邱知, 徐邦贤, 唐辉. 基于改进EEMD与GA-BP的谐振接地故障选线方法[J]. 智慧电力, 2021, 49(12): 80-87.
- 7. 闫严. 基于EMD与FIR滤波的小电流接地故障选线方法[J]. 电气技术, 2017(4): 56-60.
- 8. 张祚淏, 王利恒. 基于小波分析和GA-SVM的谐振接地故障选线方法[J]. 自动化与仪表, 2021, 36(8): 8-12+23.
- 9. 吴乐鹏, 黄纯, 林达斌, 等. 基于暂态小波能量的小电流接地故障选线新方法[J]. 电力自动化设备, 2013, 33(5): 70-75.