Modeling and Simulation
Vol.
12
No.
06
(
2023
), Article ID:
74634
,
7
pages
10.12677/MOS.2023.126453
基于势场模糊推理的机场驱鸟锥形驱离方法
孙磊,沈俊男,夏菽兰,何坚强,李文壮
盐城工学院电气工程学院,江苏 盐城
收稿日期:2023年9月2日;录用日期:2023年10月26日;发布日期:2023年11月1日

摘要
根据机场智能驱鸟的功能要求,使空中被驱离鸟群远离机场飞机上升或下降的区域,提出一种基于势场模糊推理的机场驱鸟类锥形驱离方法,该方法引入引力势场和斥力势场,结合被驱离鸟类的生物特性确定鸟类的飞行方向,驱动声光设备模拟出自然界障碍物形态,建立鸟类被动锥形避障模型,构造鸟类与虚拟障碍的碰撞函数,基于势场理论的鸟类躲避障碍行为特性,将鸟类避障后的飞离方向及鸟类受到的势场力,划分其隶属度并制定模糊规则库,利用模糊推理进行决策。该方法将仿生学和声光电应用相结合,使得空中被驱离鸟群远离危险区域,有效满足机场智能驱鸟的功能要求。
关键词
势场模糊推理,机场驱鸟,锥形避障模型,鸟类躲避障碍行为

Airport Anti-Bird Conical Removal Method Based on Potential Field Fuzzy Inference
Lei Sun, Junnan Shen, Shulan Xia, Jianqiang He, Wenzhuang Li
College of Electrical Engineering, Yancheng Institute of Technology, Yancheng Jiangsu
Received: Sep. 2nd, 2023; accepted: Oct. 26th, 2023; published: Nov. 1st, 2023

ABSTRACT
According to the functional requirements of intelligent bird repelling in airports, a cone-shaped bird repelling method based on potential field fuzzy inference is proposed to keep the bird swarm away from the area where the airport aircraft rises or descends. This method introduces gravitational and repulsive potential fields, determines the flight direction of the bird based on the biological characteristics of the bird being repelled, drives sound and light equipment to simulate the form of natural obstacles, and establishes a passive cone-shaped obstacle avoidance model for birds. Construct a collision function between birds and virtual obstacles, based on the potential field theory of bird avoidance behavior characteristics, divide the flight direction of birds after obstacle avoidance and the potential field force they are subjected to, and develop a fuzzy rule library. Use fuzzy reasoning to make decisions. This method combines bionics and optoelectronic applications to drive away bird groups in the air from dangerous areas, effectively meeting the functional requirements of airport intelligent bird control.
Keywords:Potential Field Fuzzy Inference, Airport Anti-Bird, Conical Obstacle Avoidance Model, Bird Avoidance Behavior

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
鸟击事件在航空业中被认为是一个重要的安全问题,鸟击事故的频繁发生是航空兵场站和民航机场的重点和难点问题,机场会采取一系列措施来减少鸟击事件的发生。目前机场常用的驱离手段多采用激光和强声驱离,激光驱离利用不同功率的绿色激光束在机场的低空区域来回挥舞实现鸟类驱离;强声驱离将大分贝的声音集束在一个方向上,由操作人员控制其伺服转动平台使声音对准目标实现驱离,虽然能起到一定效果,但没有智能化算法、驱离手段单一、针对性不强等原因,使得驱鸟未能达到预期效果。
无人机在三维空间中为避免无人机间的碰撞,建立基于无人机间的相对距离和相对速度的势场函数,从而保证无人机编队的稳定性 [1] 。为保证无人机编队飞行路径的最优性,提出基于多目标人工势场法的确定性算法,将最优路径划分为多个子目标,并提出MTAPF路径进入最小值点,从而保证飞行路径最优性 [2] 。通过将引力函数修改为分段函数来解决,改进的无人机群在飞行过程中躲避雷达探测并最终到达目标点的航线规划人工势场方法 [3] 。机器人采用模糊逻辑的改进人工势场法,在避障的极小值附近,基于模糊推理给予机器人辅助控制优化路径 [4] 。机器人动态避障算法对每个障碍物在速度空间上构建一个锥形区域,只要速度矢量落入该区域即认定会发生碰撞,从非锥形区域中选择一个最优的速度矢量进行避障。针对传统人工势场法在路径规划过程中容易陷入陷阱区域和局部极小点的问题,提出了一种改进人工势场法,引导机器人避开局部极小点和陷阱区域 [5] [6] [7] 。机器人行进路径改进了斥力函数势场,并提出一种自适应步进调整方法,使机器人能到达目标点 [8] [9] [10] 。人形机器人采用混合人工势场找到障碍和目标和MFO优化路径点选择最终以避免碰撞引导机器人到达目标点 [11] [12] 。LAUV实时避障结合运动学约束、动力学特性和操纵性,针对不同障碍物类型采取相应的避障措施,提出了基于水平面模糊避障规划和垂直面模糊避障规划相结合的一种三维实时避障规划方法 [13] 。针对传统人工势场法在复杂环境下避障效率低下的问题,无人机在三维空间避障提出一种将传统的球形势场改进为椭球体势场的方法 [14] 。在无人驾驶应用中,对侧向动态障碍物和同向动态障碍物工况进行分析,实现了无人车局部动态避障 [15] 。
为了确保空中被驱离鸟群远离机场飞机上升或下降的区域,本文建立势场法的驱鸟模型,根据鸟类躲避障碍的生物特性 [16] [17] ,确定障碍对鸟类的驱离方向,通过激光强声设备在一定范围内设置障碍区,建立三维空间障碍对鸟类的碰撞模型,在此基础上确定了障碍对鸟类威胁的空间最小相对速度矢量偏转角。
2. 基于鸟类原始飞行方向的势场分析
鸟类避障看作势场是指模拟鸟类飞行时采用势场方法,通过人工设定一个场景的势能函数,让鸟类沿着势能梯度移动,从而达到避免障碍物的目的。而在鸟类避障中,势能函数会被设定为鸟类在某个位置上需要获得的能量,能量的大小取决于该位置是否存在障碍物,如存在障碍物则在该位置上的能量比较小,鸟类就会趋向能量比较高的位置避免障碍物。同时,势能函数也会考虑到其他因素,如速度、距离等。
势场法是一种常见的路径规划算法,在机器人导航和自主系统中得到广泛应用。在势场法的鸟类模型中,鸟类在未受到任何影响时,鸟类为了觅食停留等行为,鸟类的正常活动是鸟类有目的的行为,该飞行方向可当作鸟类的引力矢量方向。在驱离过程中,机场智能驱鸟系统驱离鸟类时,利用声光设备营造障碍物是一种的鸟类飞行防撞方法,可以在需要保护的区域周围设置声光设备,模拟出自然界中存在的障碍物,使鸟类意识到该区域存在飞行危险,并避免进入。具体来说,营造障碍物的声光设备通常会发出高频率或低频率的声音和闪烁的灯光。这些声音和灯光会模拟出各种障碍物的特征,如树木、建筑物、电线等,让鸟类感觉到该区域存在潜在威胁。障碍物对鸟类的作用方向被当作鸟类受到的斥力矢量方向为 ,鸟类在面临威胁时会迅速飞离威胁区域,并改变飞行速度和方向,这是它们的一种逃避策略。鸟类到被驱离的目标点的方向为鸟类引力势场的方向,产生的引力矢量 ,则斥力矢量和引力矢量的合力矢量 。根据当前位置与目标位置以及障碍物之间的相对关系,计算出一个合力作用鸟类上,以引导鸟类朝着目标移动。
具体而言,如图1所示,鸟类模型由三个力组成: 、 和 。引力使鸟类朝着目标位置靠近,而规划的障碍位置产生的斥力使鸟类远离障碍物。通过叠加引力和斥力两个力,鸟类最终沿着没有障碍物的路径移动。
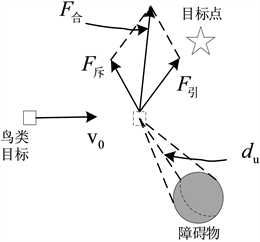
Figure 1. Potential field model of bird flight in the original direction
图1. 鸟类飞行原始方向的势场模型
鸟类遇到障碍物时的坐标为 ,障碍物坐标为 ,目标点为 ,鸟类与障碍物之间的距离为 ,当营造驱离鸟类的障碍,鸟类受到障碍的斥力作用,距离 越小,产生的斥力场强 越大,当鸟类对脱离障碍物的作用范围时,斥力场为0,斥力势场函数为
(1)
式中 为斥力函数的系数,d为斥力势场的最大作用范围距离,即认为在d范围内时鸟类才会对障碍做出反应,受到障碍的斥力作用。
鸟类与目标点的距离为 ,规划的目标点对鸟类产生的引力场强 与鸟类与目标点之间的距离正相关,随着距离越近,场强越小,直至为0,引力势场函数为
(2)
式中 为引力函数的系数,当鸟类经过目标点即驱离远离危险区域,鸟类自身寻找落地或者飞离区域的目标,此时鸟类的引力势场由鸟类自身决定。
引力势场和斥力势场产生的合力势场U函数为
(3)
如果 ,则定义鸟类在被驱离时的位置被规划至驱离路径点; 时,其对应的状态为目标点。依据上述公式即可完成鸟类在驱离时所经过的障碍点,并输出避障的路径规划。
本文针对空中被驱离鸟群远离机场飞机上升或下降的区域,提出一种基于势场模糊推理的机场驱鸟类锥形驱离方法,在模糊逻辑器的帮助下确定鸟类逃离方向进行导向驱离。
3. 基于势场模糊推理的锥形驱离鸟类模型
鸟类自身的飞行行为特性,不会在驱离时鸟类所受到的引力和斥力共线或导致合力为0,但是无法确定鸟类感觉到障碍时飞离躲避的方向,通过模糊推理对鸟类感知的障碍的反应大小进行推理,它从鸟类行为和人类经验模糊推理和决策过程,从而确定有效驱离鸟类的飞离方向和建造的虚拟障碍物对于鸟类的斥力作用。模糊推理算法通过获取到的鸟类信息,并参考鸟类的飞行特征和躲避行为,设计规则表,这样能使鸟类顺利完成避障躲避。
如图2所示,即为设计一个动态障碍参数势场模糊推理系统,其设计步骤如下:
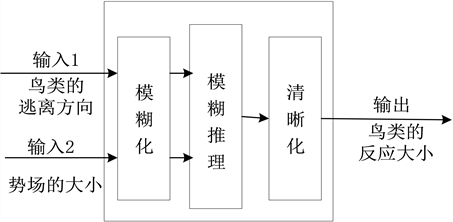
Figure 2. Schematic diagram of dynamic obstacle parameter potential field fuzzy inference system
图2. 动态障碍参数势场模糊推理系统示意图
机场驱鸟系统在实行驱离任务中,通过雷达获取到的鸟类信息:飞行速度、飞行方向和位姿信息鸟类的位姿信息 包含鸟类位置信息和姿态信息。动态障碍物的位姿信息 包含障碍物位置信息和姿态信息。
障碍物在鸟类的视角里,可以看成为一个球体,将R表示为障碍范围半径,营造的障碍物与鸟类目标之间的距离为d。经过鸟类的位置 作以 为中心、半径为R的球形障碍物的切线,当 时,所营造的障碍能被鸟类所感知,鸟类会对其障碍进行躲避,能有效利用声光设备营造障碍进行驱离,当所有的切点连接而成形成一个圆形边界范围,上文所述的切线锥面和圆形边界形成了相应的鸟类目标与障碍之间的空间碰撞锥如图3所示。

Figure 3. Collision cone between birds and obstacle balls
图3. 鸟类与障碍球碰撞锥
利用声光设备营造的障碍,鸟类感知到障碍进行躲避行为,主要取决于鸟类的参数信息和障碍的参数信息:我们把鸟类相对于障碍的飞离方向 作为系统的第一个输入,将障碍物产生的斥力和引力的合力作用作为系统的第二个输入,通过鸟类的逃离行为的有效性决定营造虚拟障碍的半径和鸟类躲避障碍的飞离方向从而确定障碍的营造位置,将鸟类的反应作为系统的输出,用一个[0, 1]的数值表示其大小。
以白鹭为例,定义模糊集合语言变量及其隶属函数表,对输入 应考虑鸟类的可能飞离方向,因此范围定在[−90, 90];对输出应根据鸟类的反应大小进行设置B,参数如下: 的离散论域为:{−90, −45, 0, 45, 90}表示为{left, center left, straight, center right, right},选择 的模糊词集为{NB, NM, ZE, PM, PB};对于U的合力大小设置为[0, 100],U的离散论域为:{0, 25, 50, 75, 100};选择U的模糊词集为{ZE, PS, PM, PL, PB};B的离散论域为:{0, 0.25, 0.5, 0.75, 1}。选择B的模糊词集为{ZE, PS, PM, PL, PB}。
模糊规则决定模糊推理的输出,文中有双输入,其中输入的各有5个水平,可设置的规则有25条,规则表如下。

Table 1. Fuzzy control rules for obstacle cone displacement
表1. 障碍锥形驱离模糊控制规则表
由上述内容确定如表1模糊推理规则,在判断营造的障碍是否会被鸟类目标感知到,并对其进行躲避的行为反应,在原先的模糊推理规则上增加过去的经验性控制理论,在鸟类与障碍距离越近所受的斥力作用越大,飞离的方向与规划的驱离点越小时,鸟类的反应越强烈越能被驱离。
将双输入到模糊推理系统中,根据规则表产生输出结果B,解模糊化的目的就是为了将输出结果转换为鸟类“规避”和“未规避”的结果。
4. 实验结果分析
利用matlab2020实验平台进行仿真验证,通过群体运动Boids模型模拟鸟类的飞行运动行为如图4,使仿真的环境更接近实际情况,通过将障碍营造在鸟类的飞行轨迹上,将鸟类的参数输入给模糊模型验证鸟类躲避障碍的有效性。

Figure 4. Simulation model of bird group movement
图4. 鸟类群体运动Boids仿真模型
表2为采用模糊逻辑建立的模糊系统,营造的虚拟障碍对鸟类驱赶的有效性。
Table 2. Fuzzy system verification results
表2. 模糊系统验证结果
当鸟类的数量增加时,将危险区域内的鸟类的驱离完全的时间也会增加,将鸟类的飞行轨迹在遇障碍时改变飞行方向时判断为鸟类对障碍进行了规避行为,此为有效对鸟类进行驱离。
5. 结论
通过对飞行鸟类的势场模型分析,提出一种基于势场模糊推理的机场驱鸟类锥形驱离方法。利用障碍对鸟类的势场大小和鸟类的飞行方向作为输入,利用模糊推理进行决策,使营造的障碍能让鸟类达到规避的效果。此方法在确定鸟类的飞离方向的基础上,实现导向驱离鸟类提供了研究思路。
文章引用
孙 磊,沈俊男,夏菽兰,何坚强,李文壮. 基于势场模糊推理的机场驱鸟锥形驱离方法
Airport Anti-Bird Conical Removal Method Based on Potential Field Fuzzy Inference[J]. 建模与仿真, 2023, 12(06): 4987-4993. https://doi.org/10.12677/MOS.2023.126453
参考文献
- 1. Wang, N., Dai, J. and Ying, J. (2021) Research on Consensus of UAV Formation Trajectory Planning Based on Improved Po-tential Field. 2021 40th Chinese Control Conference (CCC), Shanghai, 26-28 July 2021, 99-104. https://doi.org/10.23919/CCC52363.2021.9550138
- 2. Sang, H., You, Y., Sun, X., et al. (2021) The Hybrid Path Plan-ning Algorithm Based on Improved A* and Artificial Potential Field for Unmanned Surface Vehicle Formations. Ocean Engi-neering, 223, 108709. https://doi.org/10.1016/j.oceaneng.2021.108709
- 3. Xie, Y., Wang, Y., Wei, J., et al. (2022) Research on Radar Wave Avoidance for UAV Swarm Based on Improved Artificial Potential Field. 2022 10th International Conference on Intelligent Computing and Wireless Optical Communications (ICWOC), Chongqing, 10-12 June 2022, 1-5. https://doi.org/10.1109/ICWOC55996.2022.9809862
- 4. 游文洋, 章政, 黄卫华. 基于模糊改进人工势场法的机器人避障方法研究[J]. 传感器与微系统, 2016, 35(1): 14-18. https://doi.org/10.13873/J.1000-9787(2016)01-0014-05
- 5. 耿双乐, 管启. 基于控制方向角改进势场法的移动机器人路径规划[J]. 计算机与数字工程, 2019, 47(5): 1110-1114.
- 6. 万方, 周风余, 尹磊, 等. 基于电势场法的移动机器人全局路径规划算法[J]. 机器人, 2019, 41(6): 742-750. https://doi.org/10.13973/j.cnki.robot.180687
- 7. Ge, S.S. and Cui, Y.J. (2002) Dynamic Motion Planning for Mobile Robots Using Potential Field Method. Autonomous Robots, 13, 207-222. https://doi.org/10.1023/A:1020564024509
- 8. Zhang, Y., Gong, P. and Hu, W. (2022) Mobile Robots Path Planning Based on Improved Artificial Potential Field. 2022 6th International Conference on Wireless Communications and Applications (ICWCAPP), Haikou, 20-21 August 2022, 41-45. https://doi.org/10.1109/ICWCAPP57292.2022.00018
- 9. Chakravarthy, A. and Chose, D. (2011) Collision Conesfor Quadric Surfaces. IEEE Transactions on Robotics, 27, 1159-1166. https://doi.org/10.1109/TRO.2011.2159413
- 10. Elkilany, G.B., Abouelsoud, A.A., Fathelbab, R.M.A., et al. (2020) Po-tential Field Method Parameters Tuning Using Fuzzy Inference System for Adaptive Formation Control of Multi-Mobile Ro-bots. Robotics, 9, 10.
- 11. Kashyap, A.K., Parhi, D.R. and Kumar, P.B. (2022) Route Outlining of Humanoid Robot on Flat Surface Using MFO Aided Artificial Potential Field Approach. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 236, 758-769. https://doi.org/10.1177/09544054211041068
- 12. Tao, Z., Haodong, L. and Songyi, D. (2020) Multi-Robot Path Planning Based on Improved Artificial Potential Field and Fuzzy Inference System. Journal of Intelligent & Fuzzy Systems, 39, 7621-7637. https://doi.org/10.3233/JIFS-200869
- 13. 张禹, 邢志伟, 黄俊峰, 等. 远程自治水下机器人三维实时避障方法研究[J]. 机器人, 2003(6): 481-485. https://doi.org/10.13973/j.cnki.robot.2003.06.001
- 14. Yu, W. and Lu, Y. (2021) UAV 3D Environment Obstacle Avoidance Trajectory Planning Based on Improved Artificial Potential Field Method. Journal of Physics: Conference Series, 1885, 022020. https://doi.org/10.1088/1742-6596/1885/2/022020
- 15. 万超, 杨宜民. 一种改进人工势场法的多机器人局部避碰规划方法[J]. 科技广场, 2011(1): 35-37.
- 16. Sarmiento, T.A. and Murphy, R.R. (2017) Insights on Obstacle Avoidance for Small Unmanned Aerial Systems from a Study of Flying Animal Behavior. Robotics and Autonomous Systems, 99, 17-29. https://doi.org/10.1016/j.robot.2017.09.002
- 17. Lin, H.T., Ros, I.G. and Biewener, A.A. (2014) Through the Eyes of a Bird: Modelling Visually Guided Obstacle Flight. Journal of the Royal Society Interface, 11, 20140239. https://doi.org/10.1098/rsif.2014.0239