Open Journal of Transportation Technologies
Vol.07 No.03(2018), Article ID:25059,7
pages
10.12677/OJTT.2018.73023
Crossing Characteristics of Electric Bicycle Groups at Intersections
Qiong Peng1, Tao Wang1, Wenyong Li1,2, Bizhong Wei1
1School of Architecture and Transportation, Guilin University of Electronic Technology, Guilin Guangxi
2Guangxi Intelligent Transportation System key Laboratory, Guilin Guangxi

Received: May 3rd, 2018; accepted: May 17th, 2018; published: May 24th, 2018

ABSTRACT
On the basis of actual measurement data of electric bike group crossing behavior, using mathematical statistics methods, the characteristics of speed, density and number within the group of electric bicycle crossing groups at signalized intersections were first studied; secondly, the correlation between speed and density of electric bicycles was discussed. Sexuality was analyzed and a speed-density relationship model was established. The results show that there are 4 - 8 individuals in the number of electric bicycles crossing the street. The distribution of density is mainly in saddle type, mainly distributed in 0.22 - 0.38 vehicles/m2 (88%). The group of electric cyclists obeys the normal distribution at the intersection speed. The main distribution is in the range of 11 - 13 km/h.
Keywords:Intersection, Electric Bicycles, Communities across the Street
交叉口电动自行车群体过街特性
彭琼1,王涛1,李文勇1,2,韦必忠1
1桂林电子科技大学,建筑与交通工程学院,广西 桂林
2广西智能交通系统重点实验室,广西 桂林
收稿日期:2018年5月3日;录用日期:2018年5月17日;发布日期:2018年5月24日

摘 要
在电动自行车群体过街行为实测数据基础上,运用数理统计的方法,首先对信号交叉口电动自行车过街群体的速度、密度与群内数量进行了特性研究;其次对电动自行车速度、密度二者的相关性进行了分析,并建立了速度与密度关系模型。研究结果表明,信号交叉口电动自行车过街群体内数量以4~8个个体居多;密度的分布宏观上表现为马鞍型,主要分布在0.22~0.38辆/m2 (占比88%);电动自行车群体通过交叉口的速度服从正态分布,分布在11~13 km/h的速度范围内。
关键词 :交叉口,电动自行车,群体过街

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着我国经济水平的日益发展,人们出行需求随之增加,电动自行车有效地弥补了其他交通方式的不足,受到普通居民的欢迎,社会保有量逐年增加;同时,电动自行车群体庞大,野蛮行车不守规则的事情时有发生。在通过信号交叉口时电动自行车群体与机动车流为了尽快通过互相之间争抢路权,从而发生冲突,造成交叉口交通事故频发,不仅影响交叉口运行效率,也在一定程度上干扰了城市道路交通系统的正常运行,影响了城市的社会经济发展。因此,研究交叉口电动自行车群体过街特性具有非常重要的现实意义。
目前,国内外对行人群体过街特性的研究已经取得了一定的进展,如:Bennett [1] 针对信号交叉口行人过街的几种运行状态及其速度特性进行了研究;Lam [2] 等研究了行人流量和速度的关系,并分析了流量影响速度的原因;周致纳 [3] 通过实际观察发现行人违规的频率会随着群体中的人数增多而变大,并 提出了一种行人群体闯红灯行为随机决策仿真模型;赵莹莹 [4] 利用视频检测技术提取的真实行人过街轨迹得到行人过街平均速度和瞬时速度的特性及其分布曲线,并按年龄分组对行人过街的速度特性和瞬时速度特性进行了研究,分析了其产生的原因。李新波 [5] 基于实地调查与分析,构建了行人和驾驶员的博弈模型,运用累积前景理论来选择博弈模型的最优策略。陈明涛 [6] 通过数据调查分析,研究路段行人过街速度特性和等待时间阈值,分析不同影响因素下的行人群过街速度的变化,并建立了过街人群规模与速度的关系模型,探索了不同绿灯时段的行人过街速度的变化规律。电动自行车在交叉口的特性研究现状,如董艳涛 [7] 根据实测调查数据,研究城市信号交叉口电动自行车的到达规律与释放规律,给出城市信号交叉口电动自行车车流交通特性参数。韦凌翔 [8] 综合运用基于录像数据采集方法与电动自行车运行轨迹提取方法,对城市道路信号交叉口左转电动自行车行驶的横向位置分布规律、纵向蛇行运动轨迹展开较为系统的数据分析。
虽然上述对行人群体过街相关特性的研究和交叉口电动自行车个体的研究已经取得了一定的成果,但是现有的研究鲜有对于电动自行车群体过街的研究。本文通过对电动自行车群体的过街特性研究,进行相关数据的整理,得出电动自行车过街群体特性,对城市信号控制交叉口的基础建设提供必要的参考。
2. 数据采集与提取
根据群的定义并结合相关文献 [9] [10] ,定义本文中的电动自行车群体主要指在信号交叉口绿灯时间内成群通过停车线现象,群体内个体数在定量范围内(本文研究电动自行车群体内个体数 £ 10个数目),群体中个体是指能在一定间隙上产生相互影响的电动自行车。
整个数据调查阶段,主要采用视频采集样本的方法对交叉口电动自行车交通进行调查。对桂林市5个交叉口所有通过的电动自行车,采取俯视的方式进行拍摄。调查时段为某工作日的五个时段(8:00~8:30、10:00~10:30、12:00~12:30、15:00~15:30、17:00~17:30)。
以视频范围为坐标范围建立屏幕坐标,先从视频中提取电动自行车运动轨迹,再分析其在道路上行驶的横向位置坐标,应用由Brambilla等 [11] 提出的线性变换方法,把视频中的坐标转化为实际的坐标,原理如下:
设 、 为道路坐标, 、 为屏幕坐标, 为转换系数,满足:
(1)
(2)
在视频中取4个具有代表性的位置点A、B、C、D,测量其屏幕坐标与道路坐标,由公式(3)即可求解转化系数 ,再根据公式(1)、(2)求解屏幕上任一点的道路坐标。
(3)
以东进口道的左转电动车为调查对象,绘制其左转几何轨迹中心线;在其轨迹线上分别在进入交叉口的启动部分、左转行驶部分、驶出部分,选择5个电动车的横向计数截面。所选调查的交叉口左转电动自行车横断面情况为:东进口车道宽度5.0 m,有机动车和非机动车分隔带;南出口车道宽度3.0 m,无机动车和非机动车分隔带。
电动自行车过街群体速度数据的获取,测量电动自行车运动轨迹长度与时间,电动自行车运动轨迹除以时间得出速度(km/h,以下单位均为:千米/小时)。
电动自行车群体密度数据的获取,将调查的视频逐帧播放,记录拍摄路段L内每隔1 s的视频画面中存在的电动自行车车辆数 。以30 s作为统计间隔,计算 的算术平均值,再除以观测距离与有效宽度的乘积,如公式(4):
(4)
3. 信号交叉口电动自行车群体内个体数、过街密度、速度特性
3.1. 电动自行车群内个体数分布特性
为获得信号交叉口群体内的个体特性,对桂林市5个信号交叉口进行了实时的数据勘测,截取了5个不同时段一共2.5个小时的时间段内的统计数据,一共统计了184个群体。统计的数据如图1所示。
据图1所示,由于交叉口处的电动自行车抵达具有随机性,受到信号控制的影响而聚集,形成的个体集群通过现象,这符合电动自行车交通流特性;电动自行车在绿灯时间内通过交叉口是大多以4~8个个体单位为一群通过,所占的比例达到了85%,说明电动自行车过街是群体数目以中小群体为主,这与我们实际所遇到的情况相一致。
电动自行车群个体的增加与所占比例呈反比关系:群内个体数的上升,群数量所占群总体的比例下降,这主要是由于电动自行车在交叉口处绿灯信控开放期间,由于启动速度快慢不一样,还受到交叉口停车线的宽度的限制,在交叉口允许的条件下结群通过,骑行者抢行的心理会使得速度上呈现出宏观的梯度,所以结群的数量结构不一。群体内个体数量越少,通过交叉口的速度越快,所需的时间越少,这也是图表呈现负相关的因素。
3.2. 交叉口电动自行车过街群体密度分布特性
对于信控交叉口的过街群体密度特性研究,主要以群体密度大小,密度所属范围以及群体密度与群体内个体数的相关性方面进行研究。
按照单位刻度为0.02 (辆/m2,下同)进行统计,从图2可知在密度区间中,0.22以下和0.38以上的数量极少,分别仅占3%和2%,而在0.24~0.38区间的接近90%。就分布的总体而言,密度的分布宏观上表现为马鞍型,出现这种现象的原因主要有以下几点:
1) 信号交叉口处的停车区域因素。由于受红灯时间的限制,随机到达时在停车线上以群的形式聚集。绿灯开启后,受启动时间以及延误的影响时间各不相同,在绿灯初期就已经出现车群面积膨胀现象,在
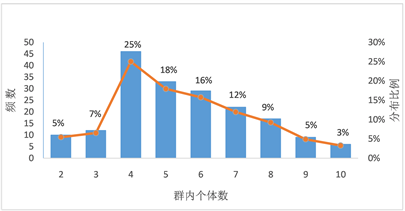
Figure 1. Characteristics of individual number distribution in a group
图1. 群内个体数分布特性图

Figure 2. Density distribution characteristics
图2. 密度分布特性图
群的统计中也主要是在这一时期产生。
2) 骑行者自身的主观因素。速度不一使得群体出现“两级分化”,这是每一个绿灯时间内过街的电动自行车群体几乎都会出现的情况。在绿灯时间内,由于电动自行车的抵达具有随机性和集群性,绿灯畅行时受到的延误较小,骑行者的抢行心理等使得过街速度较快,结群面积相对较大,所以这就造成了密度较小,这种现象微观上就产生密度较小的情况。
3) 群内的个体数量因素。在群体的划分中。按照群的定义划分的群体大小不一致,直观上而言,群体小速度较快,其骑行所需的电动自行车的行驶侧向净宽就大,占地面积大。与之对应的,单个群体个数多,其个体间的速度分布离散小,集群占地面积相对较小。同时,群体的个体间也有差异,所以就出现了密度较大的情况。
3.3. 交叉口电动自行车群过街速度分布特性
过街群体速度的研究主要从群体个体的速度、群体整体速度方面来展开。对于个体的速度研究,采用数理统计的方法,对数据进行基础的处理。群体速度的研究从整体的分布进行把握。按数据整理、分析的步骤逐次进行。按速度区间8~19,单位区间为1进行区间划分,共划分为11个速度区间,速度数量共计1010个。对群体的数据进行整理后得出速度分布图如下。
从图3中,可以明显地观察出整个速度的分布区间较为聚集,离散程度较小,大多数电动自行车通过交叉口的速度比较接近且适中,速度很快和很慢的电动自行车比较少。速度为8~9以及18~19的数量极少,而11~13的速度区间值占有极大部分;此次测量的平均速度为12.62 km/h(3.5 m/s),这符合表格的统计,对比参照其它城市的电动自行车速度(比如镇江:电动自行车通过交叉口的速度最大可达到9.39 m/s,最小速度为1.36 m/s,平均速度为4.01 m/s [7] ),桂林市的电动自行车速度较慢。分析其原因,主要有:桂林街区道路的面积较小,交叉口相对其它城市较小,非机动车道占道路的面积比例很小,很多区域的非机动车道与人行道相互共用,大大减慢了非机动车的速度;桂林市是一个旅游城市,相对来说,在桂林市交通系统中行人所占比例较高,人们的生活节奏较慢也是车速慢的一个重要原因。
所测得数据与视频录制相对比,可以发现,群内个体数较多的群体过街速度较慢。分析原因主要是群体大,则相互干扰多,车辆行驶时侧向净宽小,速度慢。据观察发现,电动自行车距离停车线远近的位置也是形成这一现象的原因,距离停车线远,则依据启动的先后,加速慢。速度较快的群体一般为绿灯时间无需排队等待的车辆,或者在排队等待时靠前端的群体。
据以上的对比分析,可以知道在信号交叉口电动自行车车群的过街速度特点是:速度相对集中,离散程度较小,分布范围小。影响群体速度的因素与个体的速度因素相类似。同时速度与密度存在相关性,而相关性的大小程度需要研究检验,这将在下文中详细阐述。
4. 电动自行车群体速度与密度关系模型
在获取电动自行车群体过街速度分布的基础上,考虑群体密度对群体过街速度的影响,如图4所示。
从图4中可以看出,群体密度(0.00~0.20辆/m2)速度分布相对离散,离散的原因是密度小,电动自行车自由自由行使的动态空间大,从而导致电动自行车穿越街道速度差异较大,由于群体密度小过街时相对速度较快且不喜欢等待而选择快速穿越机动车间隙,导致瞬时速度分布离散;密度(0.20~0.40辆/m2)的速度较为集中,这是由于密度适中,电动自行车之间的距离更加均匀,群内电动自行车的自由行驶的空间均匀,从而速度较为均匀;电动自行车群体密度为(0.40~0.60辆/m2)时,群体密度大时群内车与车之间距离小,骑行者易受到群体内其他电动自行车的影响,不能自由行驶,削弱了车辆之间运行特性的差异,使电动自行车群体中不同个体的运行速度趋于一致。
其散点图如图3,根据散点图假设电动自行车群体密度与速度关系模型为:
其中:y为电动自行车群体在通过信号交叉口的速度(km/h);x为电动自行车群体密度(辆/m2);  为平均速度(km/h);
为标准化系数。
为平均速度(km/h);
为标准化系数。
将建立的速度-密度数据表导入spss中,进行相关性检验,两者相关性结果可知两者Pearson相关性检验显示为−0.765,p = 0.000 < 0.01.表明两者在0.01水平(双侧)上显著相关。呈负相关的形态。
再对两者之间进行具体的量化描述,结果中Kendall,的tau b相关性系数为−0.606,p = 0.000 < 0.01,Spearman的rho值相关系数为−0.797,p = 0.000 < 0.01。两者的相关系数绝对值都小于0.85,不能推翻原假设,而p值显示在置信度(双测)为0.01时,表明两者相关性达到高度显著水平。在信号控制交叉口,绿灯时间群体过街的密度与速度呈负相关,即密度越大,速度越小。通过对五种模型的R值和调整R方值对比分析,其中,指数模型数值最高,多元相关系数为R = 0.985,决定系数R方 = 0.97,调整R方为0.966,即表明速度对密度的效能为96.6%的变异量,指数模型系数表如表1所示。
标准化的回归系数β绝对值达到了0.985,这表示自变量速度对因变量密度的影响越大,即速度变量的变异量也越大。
如表1所示,可有密度速度模型公式:
其中,因变量y为速度,自变量x为密度,两者满足指数关系。
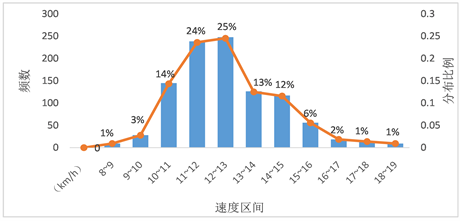
Figure 3. Velocity distribution diagram
图3. 速度分布图

Figure 4. Velocity-density scatter plot
图4. 速度-密度散点图

Table 1. Coefficient table of velocity and density model
表1. 速度与密度模型系数表
5. 总结
在信号交叉口,由于信号控制出现红绿灯交替,红灯时间在交叉口聚集的非机动车在绿灯时间以群体为表现形式通过交叉口,群与群之间、群与群内都有其不同的特性,通过数理统计的方法进行了细致的分析:
1) 利用视频检测实测数据对信号交叉口电动自行车群体过街特性进行了研究,分别对信号交叉口电动自行车群体密度、速度特性进行分析,发现交叉口过街群体速度与密度之间呈显著负相关;
2) 密度的分布宏观上表现为马鞍型,主要分布在0.22~0.38辆/m2 (占比88%);
3) 速度分布相对集中,绿灯亮起后电动自行车群通过交叉口的速度具有一定的离散性,经验证服从正态分布,离散程度较小,分布范围小;
4) 对密度与速度的分析发现,他们之间呈高度显著负相关;并对密度和速度特性进行量化研究,提出电动自行车群体的密度与速度关系模型。
本文研究为今后信号交叉口电动自行车过街设施设置提供了依据,对改善城市道路信号交叉口电动自行车安全特性、降低交通事故提供较为可靠、科学的理论和数据支撑。
基金项目
国家自然科学基金青年科学基金项目(51408145)。
文章引用
彭 琼,王 涛,李文勇,韦必忠. 交叉口电动自行车群体过街特性
Crossing Characteristics of Electric Bicycle Groups at Intersections[J]. 交通技术, 2018, 07(03): 182-188. https://doi.org/10.12677/OJTT.2018.73023
参考文献
- 1. Lam, W.H.K., Lee, J.Y.S. and Cheung, C.Y. (2002) A Study of the Bi-Directional Pedestrian Flow Characteristics at Hong Kong Signalized Crosswalk Facilities. Transportation, 29, 3-6.
- 2. Bennett, S., Felton, A. and Akcelik, R. (2010) Pede-strian Movement Characteristics at Signalized Intersections. 23rd Conference of Australian Institutes of Transport Research (CAITR), Melbourne, 10-12 December 2001, 4-7.
- 3. 周致纳, 史忠科, 李迎峰. 行人群体闯红灯行为决策模型[J]. 系统工程理论与实践, 2009, 29(11): 177-182.
- 4. 赵莹莹, 曲昭伟, 江晟, 等. 基于视频的行人过街速度特性[J]. 吉林大学学报(工学版), 2013, 43(2): 298-303.
- 5. 李新波. 基于博弈论的路段行人过街决策研究[D]: [硕士学位论文]. 长春: 吉林大学, 2016.
- 6. 陈明涛. 路段行人过街特性及其控制方法研究[D]: [硕士学位论文]. 长春: 吉林大学, 2016.
- 7. 董艳涛. 城市道路电动自行车交通特性研究[D]: [硕士学位论文]. 镇江: 江苏大学, 2016.
- 8. 韦凌翔, 王永岗, 李文文, 等. 城市道路交叉口电动自行车左转安全特性分析[J]. 盐城工学院学报(自然科学版), 2017, 30(2): 11-15.
- 9. 于泉, 史丽平, 李宁. 信号交叉口自行车群通行阶段划分[J]. 交通运输系统工程与信息, 2011, 11(4): 135-139.
- 10. 周晨静, 荣建, 冯星宇. 信号交叉口引道自行车群释放速度统计模型[J]. 道路交通与安全, 2015, 15(2): 38-41.
- 11. Brambilla, M., Ceri, S., Facca, F.M., et al. (2007) Model Driven Design and Development of Semantic Web Service Application. ACM Transactions on Internet Technology (TOIT), 77, 225-248.