 Hans Journal of Wireless Communications 无线通信, 2013, 3, 22-44 http://dx.doi.org/10.12677/hjwc.2013.31005 Published Online February 2013 (http://www.hanspub.org/journal/hjwc.html) Vehicular Ad Hoc Networks* Wei Xiong, De mi n Liang School of Electrical and Electronic Engineering, Hubei University of Technology, Wuhan Email: xw@mail.hbut.edu.cn Received: Dec. 21st, 2012; revised: Dec. 24th, 2012; accepted: Jan. 19th, 2013 Abstract: This paper describes the concept of vehicular ad hoc networks (VANET), and indicates the similarities and differences with mobile ad hoc networks (MANET) and wireless sensor networks (WSN). The system architecture for VANET is outlined, the communication protocol stacks are investigated, and the potential applications are explored. The VANET-related consortia, standards, and projects around the globe are presented. The enabling technologies, such as spectrum allocation, media access, information dissemination, and system modeling, for the realization of vehicular networks are also reviewed. Keywords: Vehicular Ad Hoc Networks (VANET); Spectrum Allocation; Media Access; Information Dissemination; System Modeling 车辆自组织网络* 熊 炜,梁德民 湖北工业大学,电气与电子工程学院,武汉 Email: xw@mail.hbut.edu.cn 收稿日期:2012 年12 月21日;修回日期:2012 年12月24日;录用日期:2013 年1月19 日 摘 要:本文阐述了车辆自组织网络(VANET)的基本概念,指出了 VANET 与移动自组织网络(MANET)、无线 传感器网络(WSN)等系统之间的异同,分析了 VA N E T的体系结构及其协议栈层次,并对车辆网络的典型应用进 行了分类,介绍了与 VA N E T相关的研究机构、主要技术标准以及欧洲、美国和日本在该领域的最新研究计划 和研究项目,最后综述了频谱分配、信道接入、信息分发和系统建模等关键支撑技术。 关键词:车辆自组织网络(VANET);频谱分配;信道接入;信息分发;系统建模 1. 引言 自组织网络(简称自组网)有许多英文名称,例如 Ad-hoc Networks、Self-organizing Networks、Infrastruc- ture-less Networks、Multi-hop Networks 以及 Packet Radio Networks,其中最为常用的是 Ad hoc Networks。 “Ad hoc”一词来源于拉丁语,本意为“向这个(to this)”的意思,在英语中其基本含义是“为某一即将 发生的特定目标、事件或局势而专门设定的,事先未 准备的”。 移动自组织网络(MANET)是由一组带有无线收 发装置的移动节点共同组成的自治系统,它不依赖于 预先架设的固定基础设施的支持而临时组建,网络中 的移动节点则利用自身的无线通信设备交换信息,当 信源和信宿节点不处于彼此的通信范围内时,需要借 助其他中间节点的中继,从而实现多跳通信[1]。 由于 MANET 分布式控制、网络自组织、节点可 移动、多跳对等通信的技术特点,使得它具有可快速 临时组网、系统抗毁性强、无需预设固定基础设施等 *资助基金:本文工作受湖北省教育厅科学技术研究计划 (Q20111406 ,Q20111404)、湖北工业大学科研启动基金项目 (BSQD12022)资助。 Copyright © 2013 Hanspub 22 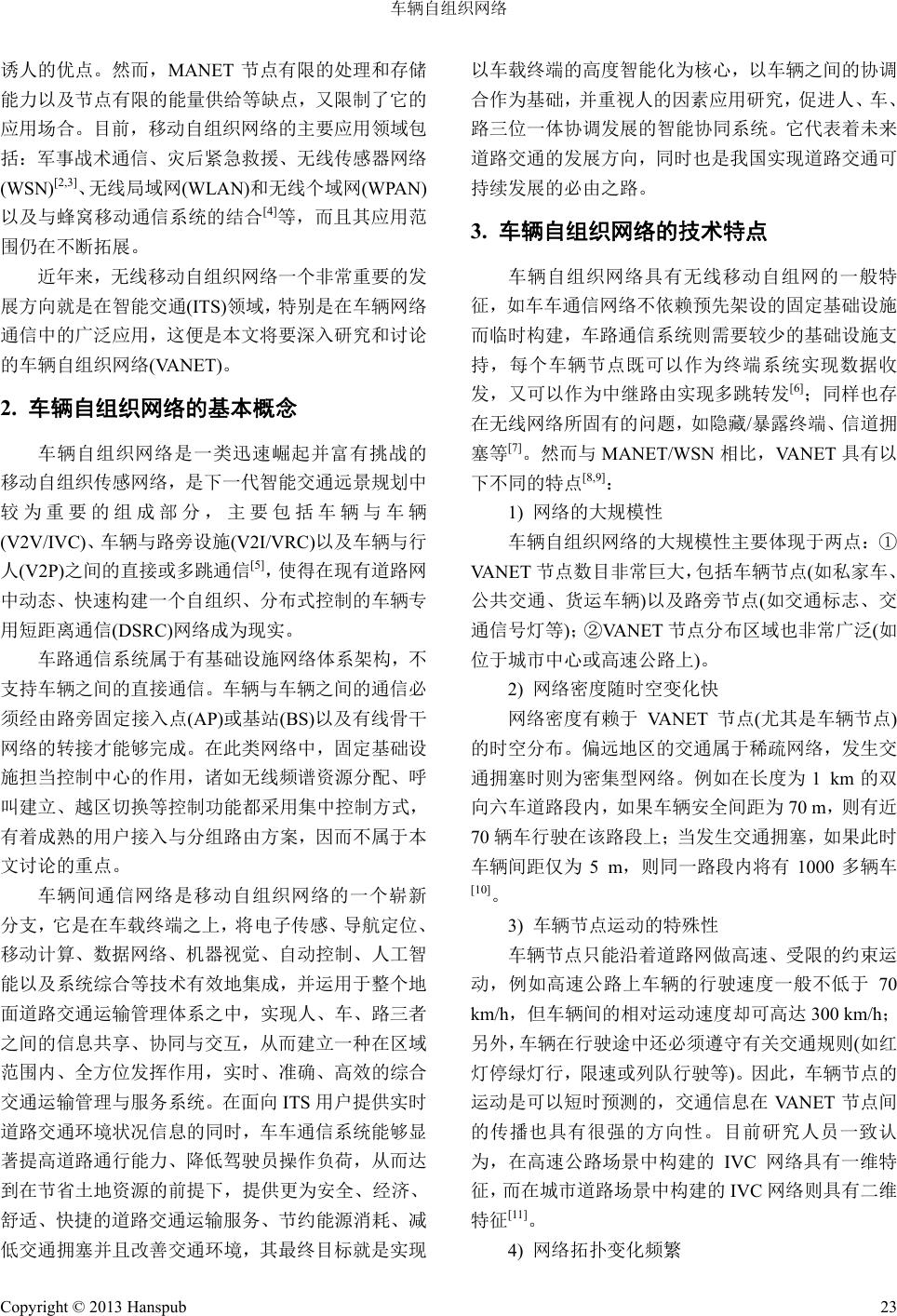 车辆自组织网络 诱人的优点。然而,MANET 节点有限的处理和存储 能力以及节点有限的能量供给等缺点,又限制了它的 应用场合。目前,移动自组织网络的主要应用领域包 括:军事战术通信、灾后紧急救援、无线传感器网络 (WSN)[2,3]、无线局域网(WLAN)和无线个域网(WPAN) 以及与蜂窝移动通信系统的结合[4]等,而且其应用范 围仍在不断拓展。 近年来,无线移动自组织网络一个非常重要的发 展方向就是在智能交通(ITS)领域,特别是在车辆网络 通信中的广泛应用,这便是本文将要深入研究和讨论 的车辆自组织网络(VANET)。 2. 车辆自组织网络的基本概念 车辆自组织网络是一类迅速崛起并富有挑战的 移动自组织传感网络,是下一代智能交通远景规划中 较为重要的组成部分,主要包括车辆与车辆 (V2V/IVC)、车辆与路旁设施(V2I/VRC)以及车辆与行 人(V2P)之间的直接或多跳通信[5],使得在现有道路网 中动态、快速构建一个自组织、分布式控制的车辆专 用短距离通信(DSRC)网络成为现实。 车路通信系统属于有基础设施网络体系架构,不 支持车辆之间的直接通信。车辆与车辆之间的通信必 须经由路旁固定接入点(AP)或基站(BS)以及有线骨干 网络的转接才能够完成。在此类网络中,固定基础设 施担当控制中心的作用,诸如无线频谱资源分配、呼 叫建立、越区切换等控制功能都采用集中控制方式, 有着成熟的用户接入与分组路由方案,因而不属于本 文讨论的重点。 车辆间通信网络是移动自组织网络的一个崭新 分支,它是在车载终端之上,将电子传感、导航定位、 移动计算、数据网络、机器视觉、自动控制、人工智 能以及系统综合等技术有效地集成,并运用于整个地 面道路交通运输管理体系之中,实现人、车、路三者 之间的信息共享、协同与交互,从而建立一种在区域 范围内、全方位发挥作用,实时、准确、高效的综合 交通运输管理与服务系统。在面向ITS 用户提供实时 道路交通环境状况信息的同时,车车通信系统能够显 著提高道路通行能力、降低驾驶员操作负荷,从而达 到在节省土地资源的前提下,提供更为安全、经济、 舒适、快捷的道路交通运输服务、节约能源消耗、减 低交通拥塞并且改善交通环境,其最终目标就是实现 以车载终端的高度智能化为核心,以车辆之间的协调 合作为基础,并重视人的因素应用研究,促进人、车、 路三位一体协调发展的智能协同系统。它代表着未来 道路交通的发展方向,同时也是我国实现道路交通可 持续发展的必由之路。 3. 车辆自组织网络的技术特点 车辆自组织网络具有无线移动自组网的一般特 征,如车车通信网络不依赖预先架设的固定基础设施 而临时构建,车路通信系统则需要较少的基础设施支 持,每个车辆节点既可以作为终端系统实现数据收 发,又可以作为中继路由实现多跳转发[6];同样也存 在无线网络所固有的问题,如隐藏/暴露终端、信道拥 塞等[7]。然而与MANET/WSN 相比,VA N ET具有以 下不同的特点[8,9]: 1) 网络的大规模性 车辆自组织网络的大规模性主要体现于两点:① VA N ET节点数目非常巨大,包括车辆节点(如私家车、 公共交通、货运车辆)以及路旁节点(如交通标志、交 通信号灯等);②VAN E T节点分布区域也非常广泛(如 位于城市中心或高速公路上)。 2) 网络密度随时空变化快 网络密度有赖于 VA NE T节点(尤其是车辆节点) 的时空分布。偏远地区的交通属于稀疏网络,发生交 通拥塞时则为密集型网络。例如在长度为 1 km的双 向六车道路段内,如果车辆安全间距为 70 m,则有近 70 辆车行驶在该路段上;当发生交通拥塞,如果此时 车辆间距仅为 5 m,则同一路段内将有 1000 多辆车 [10]。 3) 车辆节点运动的特殊性 车辆节点只能沿着道路网做高速、受限的约束运 动,例如高速公路上车辆的行驶速度一般不低于 70 km/h,但车辆间的相对运动速度却可高达300 km/h; 另外,车辆在行驶途中还必须遵守有关交通规则(如红 灯停绿灯行,限速或列队行驶等)。因此,车辆节点的 运动是可以短时预测的,交通信息在VA N E T节点间 的传播也具有很强的方向性。目前研究人员一致认 为,在高速公路场景中构建的 IVC 网络具有一维特 征,而在城市道路场景中构建的 IVC网络则具有二维 特征[11]。 4) 网络拓扑变化频繁 Copyright © 2013 Hanspub 23 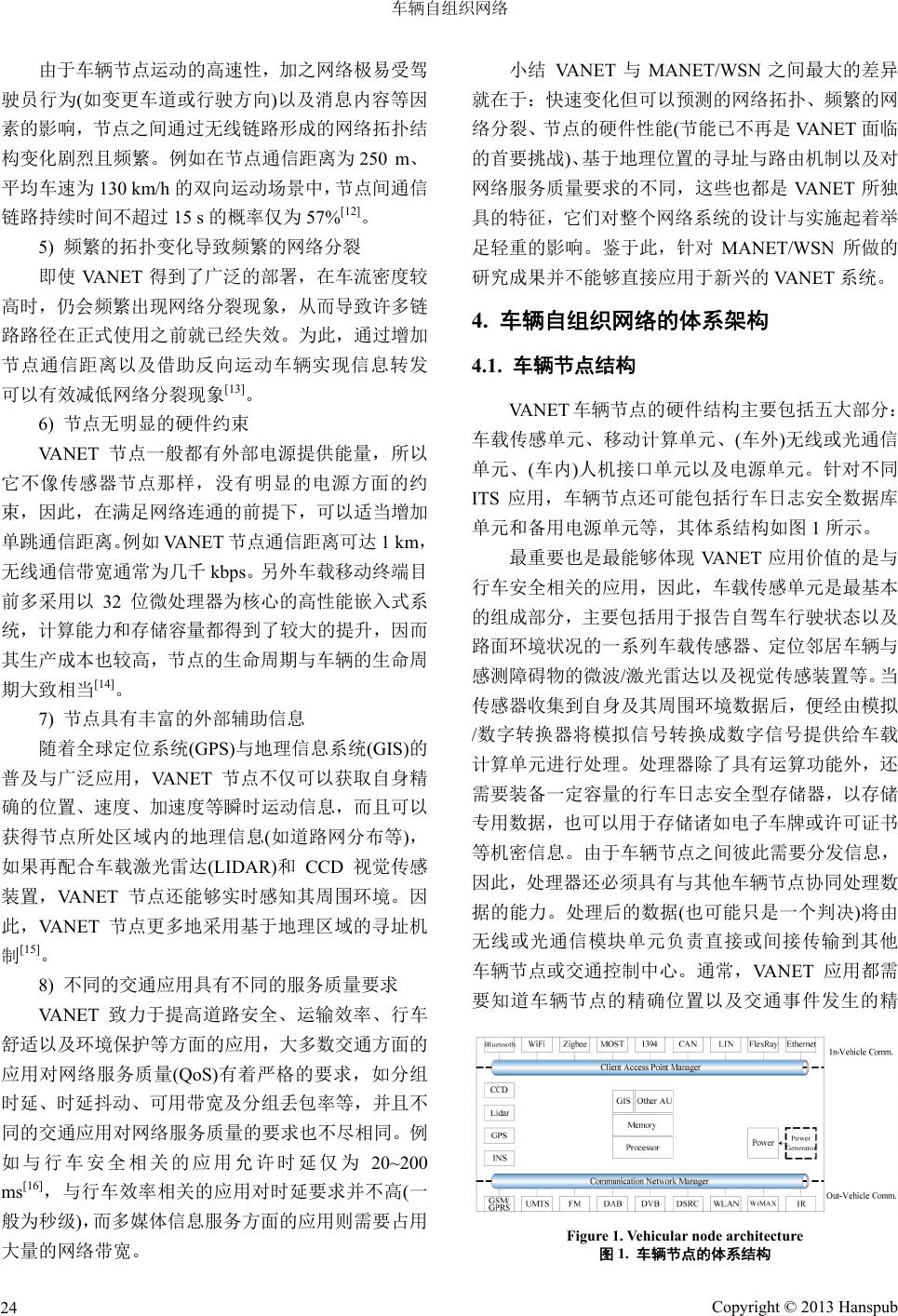 车辆自组织网络 由于车辆节点运动的高速性,加之网络极易受驾 驶员行为(如变更车道或行驶方向)以及消息内容等因 素的影响,节点之间通过无线链路形成的网络拓扑结 构变化剧烈且频繁。例如在节点通信距离为250 m、 平均车速为 130 km/h 的双向运动场景中,节点间通信 链路持续时间不超过 15 s 的概率仅为57%[12]。 5) 频繁的拓扑变化导致频繁的网络分裂 即使 VA N ET得到了广泛的部署,在车流密度较 高时,仍会频繁出现网络分裂现象,从而导致许多链 路路径在正式使用之前就已经失效。为此,通过增加 节点通信距离以及借助反向运动车辆实现信息转发 可以有效减低网络分裂现象[13]。 6) 节点无明显的硬件约束 VA N ET节点一般都有外部电源提供能 量, 所以 它不像传感器节点那样,没有明显的电源方面的约 束,因此,在满足网络连通的前提下,可以适当增加 单跳通信距离。例如 VA N E T节点通信距离可达 1 km, 无线通信带宽通常为几千 kbps。另外车载移动终端目 前多采用以 32 位微处理器为核心的高性能嵌入式系 统,计算能力和存储容量都得到了较大的提升,因而 其生产成本也较高,节点的生命周期与车辆的生命周 期大致相当[14]。 7) 节点具有丰富的外部辅助信息 随着全球定位系统(GPS)与地理信息系统(GIS)的 普及与广泛应用,VANET 节点不仅可以获取自身精 确的位置、速度、加速度等瞬时运动信息,而且可以 获得节点所处区域内的地理信息(如道路网分布等), 如果再配合车载激光雷达(LIDAR)和CCD 视觉传感 装置,VANET 节点还能够实时感知其周围环境。因 此,VANET 节点更多地采用基于地理区域的寻址机 制[15]。 8) 不同的交通应用具有不同的服务质量要求 VA N ET致力于提高道路安全、运输效 率、 行车 舒适以及环境保护等方面的应用,大多数交通方面的 应用对网络服务质量(QoS)有着严格的要求,如分组 时延、时延抖动、可用带宽及分组丢包率等,并且不 同的交通应用对网络服务质量的要求也不尽相同。例 如与行车安全相关的应用允许时延仅为20~200 ms[16],与行车效率相关的应用对时延要求并不高(一 般为秒级),而多媒体信息服务方面的应用则需要占用 大量的网络带宽。 小结 VA N E T与MANET/WSN 之间最大的差异 就在于:快速变化但可以预测的网络拓扑、频繁的网 络分裂、节点的硬件性能(节能已不再是VA N ET面临 的首要挑战)、基于地理位置的寻址与路由机制以及对 网络服务质量要求的不同,这些也都是VANET所独 具的特征,它们对整个网络系统的设计与实施起着举 足轻重的影响。鉴于此,针对 MANET/WSN 所做的 研究成果并不能够直接应用于新兴的VA N E T系统。 4. 车辆自组织网络的体系架构 4.1. 车辆节点结构 VA N ET车辆节点的硬件结构主要包括五大部分: 车载传感单元、移动计算单元、(车外)无线或光通信 单元、(车内)人机接口单元以及电源单元。针对不同 ITS应用,车辆节点还可能包括行车日志安全数据库 单元和备用电源单元等,其体系结构如图 1所示。 最重要也是最能够体现 VA N E T应用价值的是与 行车安全相关的应用,因此,车载传感单元是最基本 的组成部分,主要包括用于报告自驾车行驶状态以及 路面环境状况的一系列车载传感器、定位邻居车辆与 感测障碍物的微波/激光雷达以及视觉传感装置等。当 传感器收集到自身及其周围环境数据后,便经由模拟 /数字转换器将模拟信号转换成数字信号提供给车载 计算单元进行处理。处理器除了具有运算功能外,还 需要装备一定容量的行车日志安全型存储器,以存储 专用数据,也可以用于存储诸如电子车牌或许可证书 等机密信息。由于车辆节点之间彼此需要分发信息, 因此,处理器还必须具有与其他车辆节点协同处理数 据的能力。处理后的数据(也可能只是一个判决)将由 无线或光通信模块单元负责直接或间接传输到其他 车辆节点或交通控制中心。通常,VANET 应用都需 要知道车辆节点的精确位置以及交通事件发生的精 Figure 1. Vehicular node ar c h i t e c ture 图1. 车辆节点的体系结构 Copyright © 2013 Hanspub 24 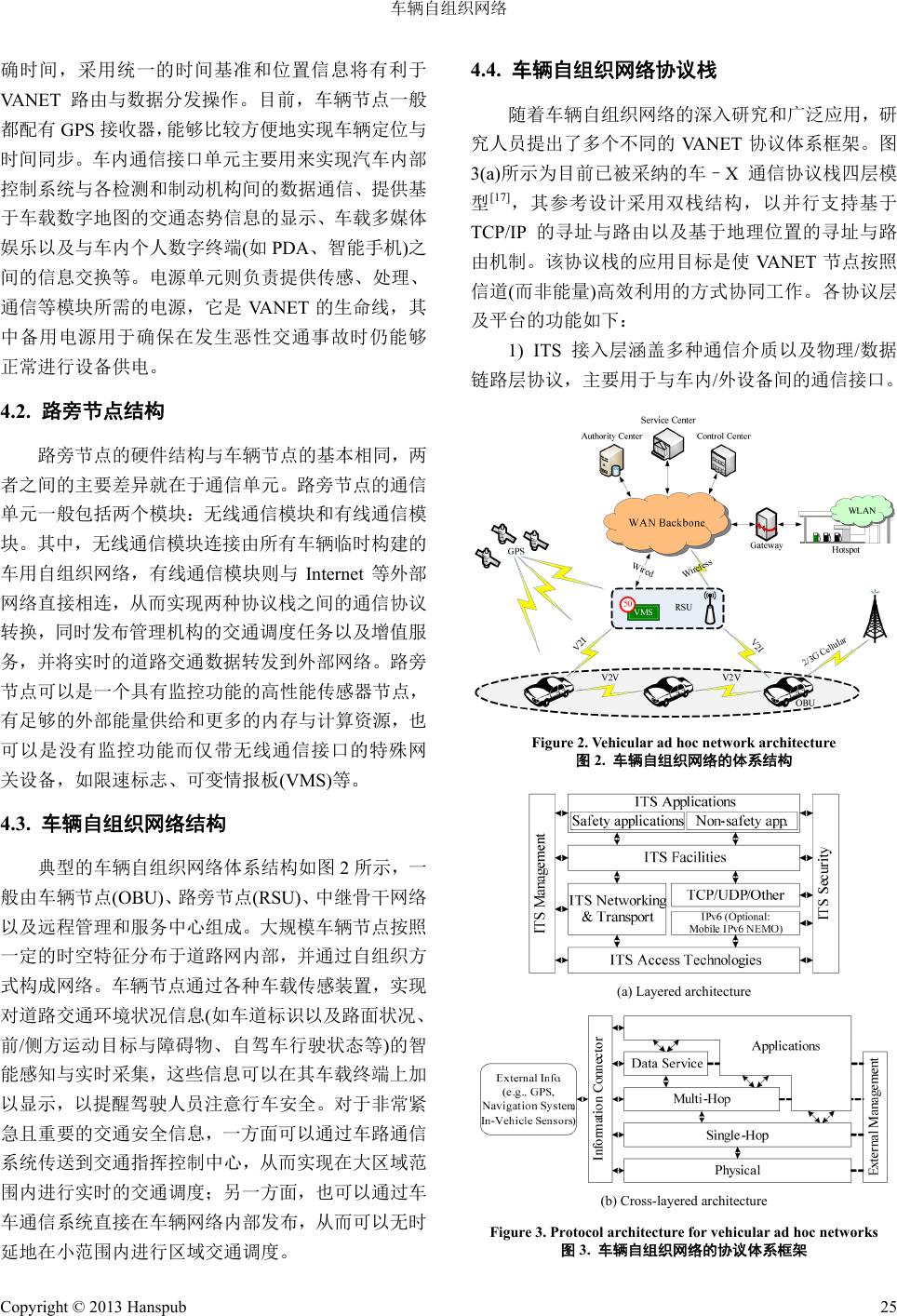 车辆自组织网络 确时间,采用统一的时间基准和位置信息将有利于 4.2. 路旁节点结构 路旁节点的硬件结构与车辆节点的基本相同,两 者之 4.3. 车辆自组织网络结构 典型的车辆自组织网络体系结构如图 2所示,一 般由车辆 研究和广泛应用,研 究人员提出了多个不同的 VANET 协议体系框架。图 ,以 的寻址与路由以及基于地理位置的寻址与路 该协议栈的应用目标是使 VAN E T节点按照 非能量)高效利用的方式协同 协议层 及平台的功能如下: S接入层涵盖多种通信介质以及物理/数据 链路层协 VA NET 路由与数据分发操作。目前,车辆节点一般 都配有 GPS 接收器,能够比较方便地实现车辆定位与 时间同步。车内通信接口单元主要用来实现汽车内部 控制系统与各检测和制动机构间的数据通信、提供基 于车载数字地图的交通态势信息的显示、车载多媒体 娱乐以及与车内个人数字终端(如PDA、智能手机)之 间的信息交换等。电源单元则负责提供传感、处理、 通信等模块所需的电源,它是VANET 的生命线,其 中备用电源用于确保在发生恶性交通事故时仍能够 正常进行设备供电。 间的主要差异就在于通信单元。路旁节点的通信 单元一般包括两个模块:无线通信模块和有线通信模 块。其中,无线通信模块连接由所有车辆临时构建的 车用自组织网络,有线通信模块则与Internet 等外部 网络直接相连,从而实现两种协议栈之间的通信协议 转换,同时发布管理机构的交通调度任务以及增值服 务,并将实时的道路交通数据转发到外部网络。路旁 节点可以是一个具有监控功能的高性能传感器节点, 有足够的外部能量供给和更多的内存与计算资源,也 可以是没有监控功能而仅带无线通信接口的特殊网 关设备,如限速标志、可变情报板(VMS)等。 节点(OBU)、路旁节点(RSU)、中继骨干网络 以及远程管理和服务中心组成。大规模车辆节点按照 一定的时空特征分布于道路网内部,并通过自组织方 式构成网络。车辆节点通过各种车载传感装置,实现 对道路交通环境状况信息(如车道标识以及路面状况、 前/侧方运动目标与障碍物、自驾车行驶状态等)的智 能感知与实时采集,这些信息可以在其车载终端上加 以显示,以提醒驾驶人员注意行车安全。对于非常紧 急且重要的交通安全信息,一方面可以通过车路通信 系统传送到交通指挥控制中心,从而实现在大区域范 围内进行实时的交通调度;另一方面,也可以通过车 车通信系统直接在车辆网络内部发布,从而可以无时 延地在小范围内进行区域交通调度。 4.4. 车辆自组织网络协议栈 随着车辆自组织网络的深入 3(a)所示为目前已被采纳的车–X通信协议栈四层模 型[17],其参考设计采用双栈结构 并行支持基于 TCP/IP 由机制。 信道(而工作。各 1) IT 议,主要用于与车内/外设备间的通信接口。 Figure 2. Vehicular ad hoc network architecture 图2. 车辆自组织网络的体系结构 (a) Layered architecture (b) Cross-layered architecture Figure 3. Protocol architecture for vehicular ad hoc networks 图3. 框架 车辆自组织网络的协议体系 Copyright © 2013 Hanspub 25  车辆自组织网络 目 统的标准总线,适合线控操作的FlexRay 也成为新一 VA N E T内部以及 VANET 与Internet 之间实现 数据 层提供的数据结构可存储、汇集、维护不 同类 应用接口,它直接面向用户,以满足用 户的 ;另一部分 则独 不同层内安全消息格式的定义、身份认 证和 了适 多的考 虑, 5. 车辆自组织网络的典型应用 提供的容错 的崩 前控域网(C N)总线协议已成为汽车计算机控制系A 代汽车内部网络通信协议,面向媒体的系统传输 (MOST)总线专门用于满足车载高端娱乐的要求,蓝 牙、WiFi、ZigBee 等短距离通信技术则支持与 PDA、 智能手机、笔记本电脑及相关外设间的无线信息交 换。车辆外部通信以无线接入技术为主,可大致分为: ①专用频段上的中短程通信技术,例如 5.8/5.9 GHz 专用短距离通信/车载环境无线接入(DSRC/WAVE)、 红外(IR);②工业、科学及医疗(ISM)频段上的中短程 通信技术,例如 2.4/5.0 GHz 无线局域网(WLAN);③ 无线城域网(WMAN)技术,例如 Wi MAX;④蜂窝移 动通信技术,例如 GSM/GPRS、UMTS;⑤地面广播 技术,例如调频(FM)、数字音/视频广播(DAB/DVB) 等。 2) ITS网络和传输层包括一系列数据分发协议, 从而在 的透明传输。ITS网络层协议主要负责信源和信 宿节点间高效路由的发现与选择,ITS传输层协议则 提供可靠的端到端连接,并根据其上的 ITS 构件层和 应用层需求实现流量控制和网络拥塞控制。协议栈中 TCP/UDP 和IPv6 两层作为 Internet 协议组的一部分, 可以保证 VA N E T系统能够与广泛普及的互联网应用 相兼容。 3) ITS 构件层是支持各项任务应用的特殊功能 集,通过该 型的异构源数据,允许在不同的应用中选择不同 的寻址方案,提供面向 ITS 的特定消息处理机制,并 支持建立和维护通信会话。其中服务管理构件是最为 重要的组成部分之一,完成服务发现、服务下载与管 理等功能。 4) ITS应用层提供基于车车 /车路通信等道路交 通服务的高层 不同需求。目前主要考虑的是与行车安全、行车 效率以及在途信息娱乐等方面的应用。 5) ITS管理平台的诸多机制一部分将融入到上述 各层协议之中,用以优化和管理协议流程 立在协议外层,并通过各种显示与配置接口对 VA N ET节点进行控制和管理,例如车辆网络管理、 节点移动性管理以及交通服务管理等,并实现信息的 跨层交互。 6) ITS安全平台则提供安全和隐私服务,主要包 括通信协议栈 安全证书的管理、终端海量数据云存储的安全问 题以及敏感数据的防窃取和防篡改等方面的应用。 基于分层的方法试图保持类似TCP/IP 协议层次 及其功能和接口,并针对 VANET 的具体应用需求作 当改进,以适应车辆自组网中单跳及多跳通信要 求。然而协议栈中各层之间是相互独立的,通过服务 访问点(SAP)仅能够实现与相邻协议层实体间的交 互,因此不利于多层数据融合处理。图 3(b)所示的协 议栈改进了原始模型(参见文献[18]),它继承了传统分 层架构的思想,以简化协议的设计和实现,同时也增 强了不同协议层之间的协作与信息共享。应用层在该 协议栈中的位置比较特殊,它根据VA N ET具体应用 的需要,从其下多个 SAP 中选择是否直接使用某个低 层提供的服务,所以在图中采用倒阶梯型来描述这个 功能层。车载GPS 、GIS及传感器等外部设备则通过 一个公共的外部信息接口,从而实现与各协议层之间 的数据共享与交互。外部管理平台则作为系统的配置 接口允许用户设置或修改有关协议层参数。 小结 早期的 VA N ET主 要是 为车辆编 队行 驶以 及协同驾驶系统设计的,没有对体系结构作过 其数据传输框架多基于TCP/IP 分层模型,并对 物理层和数据链路层作了必要的修改,以适用于车载 环境。协议栈中下层通过层间接口向上层提供服务, 但不能实现跨层操作。随着研究的深入,特别是当 VA N ET需要提供多种承载业务,并满足一定的服务 质量保障时,就应当考虑如何选择最为合适的体系结 构,需要对原有的协议栈进行重新设计。目前,多采 用具有跨层交互功能的协议体系架构,高层应用程序 可直接调用其下任意多层的信息,从而能够满足不同 的交通应用需求。由于各功能层之间耦合度较高,因 而协议设计与维护也较为困难。其中车车/车路专用通 信协议栈为强制实现,以支持基于地理定位的交通安 全方面的应用。 车辆网络的自组织性和大规模节点 能力使其不会因为某些节点的异常而导致整个系统 溃,非常适合在特殊时刻、特殊环境中快速构建 Copyright © 2013 Hanspub 26  车辆自组织网络 Copyright © 2013 Hanspub 27 Table 1. Typical applications of vehicular ad hoc networks 表1. 车辆自组织网络的典型应用 典型应用 主要 通信方式 寻址 方式 应用 分类 通信基础设施,因此具有广阔的应用前景。通过运用 新兴的车–X通信技术,能够实现道路交通安全、交 通运输管理、在途增值服务等方面的应用[19],如表 1 所示。有关 VANET 应用的不同分类方法,读者还可 以参见文献[20]。 5.1. 道路交通安全方面的应用 面向交通安全方面的应用是最为重要,也是最能 够体现 VA N ET应用价值的一类应用,它是在车辆高 速行驶的过程中,通过与其它临近车辆和/或路旁基础 设施之间的无线通信,周期性交换彼此的运动状态(如 应用描述 车辆协同防撞告警 车辆主动监听其邻居车辆发送的运动状态信息,并对潜在的交通事故发出警告, 以避免(连环)追尾 事故的发生。 地理 (CCW)[26] 等恶性交通 V2V 寻址 交叉路口协同防撞 交叉路口附近的车辆向邻近车辆或路侧单元周期性广播其位置及运动状态信息, V2V/V2I 协同车道预留 紧急救援或公共交通车辆要求沿途所有车辆为其让道, V2V/V2I 事故后告警 事故车辆提醒正在驶向该事故地点的所有车辆注意其前方潜在的交通危险, 接收到事故告警信标的路旁单元则将该信息转发到交通控制中心,以便及时处理事故现场。 V2V/V2I 逆向行驶告警 道路环境通告 路旁传感器实时检测道路路面是否覆有积水或积雪,并将容易打滑路段的信息发送给过往车辆, 此类信息借助车辆的运动还会发布到更远的范围,从而提醒驾驶人员及早做好预防。 V2V/V2I 车道变更辅助 超车道上行驶的车辆通过报告其运动方位,借以提醒邻近车道上行驶的车辆注意, V2V 车辆协同编队行驶 (Pla 高 从而使车流更加畅通和安全,同时也减少有害气体的排放。 分岔路口处的车辆在进入主干道之前,通过路侧单元侦测并将此信息发送至主干道上的车流, 借V I 车辆限速提示 路侧单元根据当地的交通法规或天气情况 V2I 地理 道路施工通告 路侧单元根据某段道路的施工情况向过往车辆发布施工区域通告信息, V2I 面 智能交通流控制 通过测算道路上实际车流量来自动优化或分配交叉路口红绿灯时间, V2V/V2I 通过对道路交通实时信息的收集、处理和发布, 同时还能够为交通管理、规划部门提供实时交通信息支持,使其决策更科学、更合理。 电子不停车收费 (ETC) V2I 寻址 面 向 交 P2P 文件共享[32, 33] 包括带宽、存储空间和计算能力等。因此,当有新节点加入并对系统请求增多时, 整个系统的容量也会随之增大,同时分布式特性也增加了网络系统的健壮性。 V2V/V2I 寻址 (FPM) ] 通过路旁无线通信终端提供的实时停车信息,从而引导驾驶人员更方便、快捷地找到停车位。 实时视频传输 在车辆网络环境中,以全新的自组网方式实现多媒体及视频信号的实时传输, V2V/V2I IP 寻址 多名游戏玩家在乘车旅行途中,通过编队行驶的车辆临时组成的无线通信网络进行车间互动娱乐, 寻址 高速互联网接入 (Hotspot)[39] 为公众在加油站、停车场、旅馆等热点区域提供高速 Internet 接入服务, 实现在线收发 E-mail、阅读新闻、即时聊天等。 V2I IP 寻址 务 (ICA)[27] 并根据各自的运动方向和速度判断彼此之间是否存在碰撞的可能。 地理 寻址 (CLR)[28] 同时也要求沿途所有交通信号灯保障其快速赶到事发地点或优先行驶。 地理 寻址 (PCW) 地理 寻址 (WDW) 针对单行道中逆向行驶车辆发出警告,并提示驾驶人员正确的行驶方向。 V2V/V2I 地理 寻址 (RCW) 地理 寻址 (LCA) 避免侧挂等交通事故的发生。 地理 寻址 tooning)[29] 速公路上行驶的车辆能够感知同向行驶的其它车辆,通过彼此之间实时的信息交换, 能够为驾驶人员提供及时反馈,并在适当时候采取纠正措施, V2V 地理 寻址 分岔路口切入辅助 (BMA) 以避免因驾驶人员的视线死角而造成的车辆擦撞等交通事故。 2V/V2 地理 寻址 (SLW) (如雨雪天气或能见度等)向过往车辆发送速度限制信标, 同时也可以采集超速行驶车辆的电子车牌,以便作为后期执法的凭据。 寻址 (WZW) 以提醒驾驶人员注意行车安全。 地理 寻址 向 交 通 安 全 (ITFC)[30] 同时受控区域内的多个交通信号 灯还可以相互关联、协同调度,从而有效提高道路车辆通行率。 地理 寻址 实时道路交 信息 通 (RTTI)[31] 使道路使用者可以在信息预知的模式下对自己出行时间、出行方式、出行路线进行优化调整, 从而避免交通拥塞,提高整个道路系统的运输效率, V2V/V2I 地理 寻址 车辆在通过收费站点时,利用车载设备实现车辆识别等操作, 并自动从预先绑 路通行能力, 降低收费管理成本,提高车辆营运效益。 定的 IC卡或银行帐户中扣除相应费用,可以显著提高道IP 通 管 理 不同于传统的客户端/服务器(C/S)模式, 点对点(P2P)网络的一个重要目标就是让所有的网络节点都能够提供资源, IP 停车场管理 [34-36 V2I IP 寻址 (RTVT)[37] 以帮助不同车辆内的网络用户之间进行实时通信和共享信息的需要。 多人在线游戏 (MOG)[38] 同时还可以在游戏过程中与其他玩家进行语音或视频交流。 V2V IP 在 途 增 值 业  车辆自组织网络 当前 瞬 控制状态)以及道路的环境状况(如路面是否有积水或 积雪 息,从而对其前后左右 危险进行主动检测,并在车辆与危险目标可能发生 碰撞的情 ,进行声光报警(以提示驾驶人员注意危 险目标所在方位及其危险程度 活相应的防撞应 相比那些仅基于一系列车载传感装置(如超声波、 雷达、激光、机器视觉、红外等)的安全辅助系统而言, 主要是通 过GPS 警方面还 不可比拟的优势。然而,为了解决传统 GPS 定位精度问题以及在困难地区由于高大建筑 物、桥梁、隧道、树木等的遮挡或多径效应,导致 安全方面的 具有最高的优先级,它 息的快速、可靠分发有着非常严格的要 广播方式加以保证 ,同时也需要解决 广播风暴 [24] 技术的协同防撞告警 服务要求所有车辆都必 须装备 VA N E线通信设施(即接近 100%的市场普 及率 ),如图4所示。 用主要是基 移动采集功能,从而实现对道路交通流信息的动态、 信系统传送到交通 指挥控制 通信系统直接在车辆网络内部发布,并由各个车辆 车辆具有的时位置、速度、加速度和转向灯的 )等实时信 四个方向上的潜 在 况下 )或激 急措施(如启动自动刹车系统或提前触发安全气囊), 其应用目标是努力提高道路交通运输网络的安全运 行能力,避免侧挂或连环追尾等恶性交通事故的发 生,并显著减少人员伤亡以及财产损失。 基于车车/车路通信技术的交通安全类应用 获取自身的位置、速度和加速度等运动信息, 无须进行复杂的信号处理或图像处理;借助中间车辆 的信息转发,后者在应对非视距范围内的交通事故预 具有 的 GPS 信号质量下降,定位精度的降低无法满足协同安 全驾驶服务的应用需求[21]。因此,采用差分 GPS(DG PS)提高定位精度[22],并结合陀螺仪等惯性导 航系统(INS)实现航位推算也是目前广泛研究的发展 方向。 面向行车 应用 对紧急告警消 求,目前多以 [23] 问题 。此外,这类应用还要求具有较高的 市场普及率才能够得以最终实现,例如基于车车通信 (CCW) T无 [25] 5.2. 交通运输管理方面的应用 面向行车效率方面的应 于浮动车的 实时监测。一方面可以通过车路通 中心,并由交通控制中心进行集中处理,以 获得整个城市道路网的交通流分布,从而实现在大区 域范围内的实时交通调度;另一方面也可以通过车车 0% penetration rate infrastructure 10 Figure 4. Necessary vehic le a n d i nfrastructure penetration rates for different kinds of applications 图4. 车辆自组织网络的典型应用及其所需的市场普及率 节点分布式处理,以获得局部道路的实时交通信息, 从而能够无时延地在小范围内进行区域交通调度。 通过在车辆节点、路旁设施以及交通控制中心三 者之间共享实时的道路交通信息,从而提高交通信息 资源的利用效率,改善道路交通运输网络的拥堵状 况,并有 要 范围内的 级,并且会在短时间内占用大量 的网络带宽资源; 时,为了保持与传统互联网业务 前大部分应用尚处于理论研究及实验评估阶段,加之 0% 效缩短行车时间。 面向行车效率的应用虽然对实时性没有特别 求,但是过高的时延以及丢包率也同样会使消息质量 大打折扣[15]。由于信源/信宿节点通常为某一地理区域 任意车辆,因此,上述两类典型应用多采用 地理寻址方式[11]。 5.3. 在途增值服务方面的应用 在途增值服务方面的应用则主要是通过车路通 信系统以及车载智能终端,为驾乘人员提供形式多 样、内容丰富的移动通信、移动办公以及影音娱乐等 增值业务,从而提升智能交通系统的应用价值。此类 应用具有最低的优先 同 的兼容性,通常采用 IP 寻址方式。 小结 随着无线通信网络技术的进步与普及,行 车安全问题越来越受到重视,IEEE 针对 VANET 也定 义了约 40种相关应用,除了学术界的前瞻技术探讨 外,美国、欧洲和日本等交通发达国家的产业界也在 积极发展各种类型的应用研究,显示出国际上对 VA N ET相关应用与研究发展的高度重视。然而,目 Copyright © 2013 Hanspub 28  车辆自组织网络 大规模部署该系统还涉及到投资和法律等方面的问 题, 展示和讨论车辆组网互联 会 )、欧洲车车通信协会(C2C-CC)以及日本 加州大学伯 克利 2 1 1 无线通信 系统 标准,并于2003 年发 因此,如何将理论成果转化为实际应用便成为现 阶段的主要任务之一。 6. 车辆自组织网络相关研究机构与项目 6.1. 相关研究机构及主要技术标准 VA N ET研究人员多来自图论、统计物 理学 、计 算机网络及交通工程等不同领域,其研究成果主要发 表于 IEEE/ACM 等相关学术期刊和会议。特别值得一 提的是,ACM 自2004 年起每年都会专门举办一届 VA N ET国际研讨会,借以 技术的最新研究进展。除美国车辆安全通信协 (VSCC Internet ITS 协会等产业研究机构外,美国 分校[21,2 ]和洛杉矶分校[20,32,33]、卡耐基·梅隆大 学[24,35]、老道明大学[36,40,41]、乔治·华盛顿大学[8]、乔 治·梅森大学[27]、罗格斯大学[28]、马里兰大学[31]、德 国曼海姆大学[1 ,13, 8]、卡尔斯鲁厄大学[7,18,19]、汉诺威 大学[12]以及瑞士联邦理工学院[6,42]等著名学府也开始 了车辆自组网方面的研究工作,纷纷成立了 VA N E T 研究小组并启动或参与了相关研究计划。 国际标准化组织(ISO)智能运输系统技术委员会 (TC204)第16 工作组(WG16),即广域通信、协议及接 口工作组,提出了一系列被称为中长程通信系统空中 接口(CALM)的草案标准,并规定了有线和 的通用框架、网络协议和接口定义,采用的接入 技术主要包括:蜂窝通信、卫星通信、红外通信、5 GHz 微波和 60 GHz毫米波通信以及移动无线宽带等,能 够实现车辆与车辆、车辆与路旁设施、车辆与行人以 及车辆与Internet 间的直接或多跳通信(如单播、多播 和广播),并承载所有类型的应用(如ITS 安全类、非 安全类应用以及传统互联网应用等),其网络层设计为 支持 IP(如IPv6)以及非 IP(如FAST)类型的通信[17], 其概念验证示范模型如图 5所示。 美国材料试验协会(A STM)、电气和电子工程师 协会(IEEE)以及汽车工程师协会(SAE)共同采纳的 DSRC/WAVE 标准。其中,ASTM 车路通信小组委员 会(E17.51)负责开发 5.9 GHz DSRC 布其物理层与媒介访问控制(MAC)层规范 (E2213-03[43]),它也是 IEEE WLAN 工作组项目 802.11p 的基础。相应的高层协议规范则由IEEE DSRC 工作组负责,主要包括四个标准[44]:①WAVE 资源管理(P1609.1);②WAVE 应用和管理信息安全服 务(P1609.2 );③WAVE 网络服务(P1609.3);④WAVE 多信道操作(P1609.4)。SAE 则主要负责开发消息集 (J2735)、数据字典及应用框架等标准。 RSU RSU 5GHz WLAN IR DSRC 5.8GHz DSRC Vehicle-t o-Vehic le (WLAN or 60GHz) Portabl e-to -Vehicle RSU RSU-to-RSU Hot-Spot (Wireless LAN) RSU Satellite DMB GPS Terrestrial CALM DMB Cellular Portable Internet Car 2 Ca r Communicatio n Support of ITS and CVIS V2V and V2I communication, based on geo- aware multi-hop routing SAFE SP OT V2V and V2I communicati on for safety and traffic effici ency applications using car2car and CALM technologies Internet Services based on continuous communication over 802.11, GSM, UMTS, IR, IPv6, etc. V2V and V2I communication when no routing is needed Portable Internet Cellular Figure 5. Proof of concept demonstration for CALM technology 图5. 中长程通信系统空中接口(CALM)概念验证示范模型 Copyright © 2013 Hanspub 29 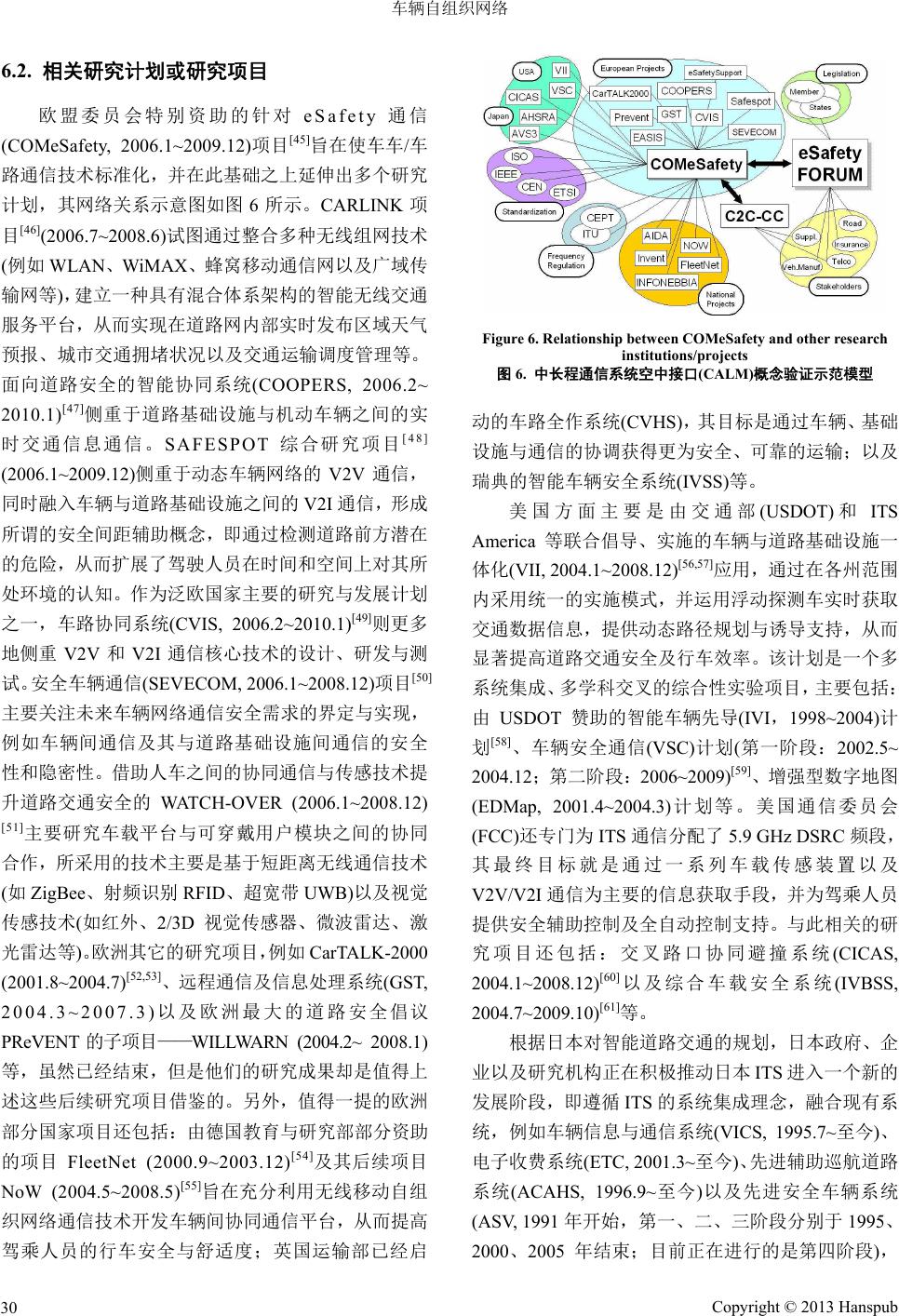 车辆自组织网络 6.2. 相关研究计划或研究项目 欧盟委员会特别资助的针对 eSafety通信 (COMeSafety, 2006.1~2009.12)项目[45]旨在使车车/车 路通信技术标准化,并在此基础之上延伸出多个研究 计划,其网络关系示意图如图6所示。CARLINK 项 目[46](2006.7~2008.6)试图通过整合多种无线组网技术 (例如 WLAN、WiM AX、蜂窝移动通信网以及广域传 输网等),建立一种具有混合体系架构的智能无线交通 服务平台,从而实现在道路网内部实时发布区域天气 预报、城市交通拥堵状况以及交通运输调度管理等。 面向道路安全的智能协同系统(COOPERS, 2006.2~ 2010.1)[47]侧重于道路基础设施与机动车辆之间的实 时交通信息通信。SAFESPOT 综合研究项目[48] (2006.1~2009.1 2)侧重于动态车辆网络的 V2V 通信, 同时融入车辆与道路基础设施之间的V2I 通信,形成 所谓的安全间距辅助概念,即 险,从而扩展了驾驶人员在时间和空间上对其所 认知。作为泛欧国家主要的研究与发展计划 之一 通过 测道路前方潜在检 的危 处环境的 ,车路协同系统(CVIS, 2006.2~2010.1)[49]则更多 地侧重 V2V和V2I 通信核心技术的设计、研发与测 试。安全车辆通信(SEVECOM, 2006.1~2008.12)项目[50] 主要关注未来车辆网络通信安全需求的界定与实现, 例如车辆间通信及其与道路基础设施间通信的安全 性和隐密性。借助人车之间的协同通信与传感技术提 升道路交通安全的 WATCH-OVER (2006.1~2008.12) [51]主要研究车载平台与可穿戴用户模块之间的协同 合作,所采用的技术主要是基于短距离无线通信技术 (如ZigBee、射频识别 RFID、超宽带UWB)以及视觉 传感技术(如红外、2/3D视觉传感器、微波雷达、激 光雷达等)。欧洲其它的研究项目,例如CarTALK-2000 (2001.8~2004.7 )[52,53]、远程通信及信息处理系统(GST, 2004.3~2007.3)以及欧洲最大的道路安全倡议 PReVENT 的子项目——WILLWARN (2004.2~ 2008.1) 等,虽然已经结束,但是他们的研究成果却是值得上 述这些后续研究项目借鉴的。另外,值得一提的欧洲 部分国家项目还包括:由德国教育与研究部部分资助 的项目 FleetNet (2000.9~2003.12)[54]及其后续项目 NoW (2004.5~2008.5)[55]旨在充分利用无线移动自组 织网络通信技术开发车辆间协同通信平台,从而提高 驾乘人员的行车安全与舒适度;英国运输部已经启 Figure 6. Relationship between COMeSafety and other research institutions/projects 图6. 中长程通信系统空中接口(CALM)概念验证示范模型 动的车路全作系统(CVHS),其目标是通过车辆、基础 设施与通信的协调获得更为安全、可靠的运输;以及 瑞典的智能车辆安全系统(IVSS)等。 交通部(UT) 和ITS 实施的车辆与道路基础设施一 [56,57] 系统(IVBSS, 根据日本对智能道路交通的规划,日本政府、企 ITS 发展阶段,即遵循 ITS 的系统集成理念,融合现有系 统,例如车辆信息与通信系统(VICS, 1995.7~至今)、 电子收费系统(ETC, 2001.3~至今)、先进辅助巡航道路 系统(ACAHS, 1996.9~至今)以及先进安全 车辆系 统 (ASV, 1991年开始,第一、二、三阶段分别于 1995、 2000、2005 年结束;目前正在进行的是第四阶段), 美国方面主要是由 SDO America 等联合倡导、 体化(VII, 2004.1~2008.12)应用,通过在各州范围 内采用统一的实施模式,并运用浮动探测车实时获取 交通数据信息,提供动态路径规划与诱导支持,从而 显著提高道路交通安全及行车效率。该计划是一个多 系统集成、多学科交叉的综合性实验项目,主要包括: 由USDOT 赞助的智能车辆先导(IVI,1998~2004)计 划[58]、车辆安全通信(VSC) 计划(第一阶段:2002.5~ 2004.12 ;第二阶段:2006~2009)[59]、增强型数字地图 (EDMap, 2001.4~2004.3)计划等。美国通信委员会 (FCC)还专门为 ITS 通信分配了 5.9 GHz DSRC 频段, 其最终目标就是通过一系 列车载 传感 装置以 及 V2V/V2I 通信为主要的信息获取手段,并为驾乘人员 提供安全辅助控制及全自动控制支持。与此相关的研 究项目还包括:交叉路口协同避撞系统(CICAS, 2004.1~2008.12 )[60] 以及综合车载安全 2004.7~2009.10 )[61]等。 业以及研究机构正在积极推动日本 进入一个新的 Copyright © 2013 Hanspub 30  车辆自组织网络 从而实现集 ITS 于一体的智能道路交通基础设施,即 Smartway。 小结 以上简要介绍了欧洲、美国和日本在 VA N ET领域的研究、应用及其发展趋势,不难看出: 尽管各国对其称谓不一,内容也不尽相同,但都是以 道路和车辆为基础、以信息处理与通信技术为核心、 以出行安全和行车效率为目的,并将道路交通基础设 施的智能化及其与车载终端一体化系统的协调合作 作为研发方向和突破重点。国内对此方面的研究尚处 于 究发 道路交通安全保障水重大需求,启动了为期 3 年的智能车路协同关键技术研究 主 框架,攻克 智能车载 评估潜在危险,其研究与发 展将 界也称之为 IEEE 802.11p或WAVE)是 专门 1000 m,并 且受天气影响小等,因此特别适用于车载环境。此外, 优先级的行车 安全 [66] ISM 频段的使用。早期也曾采用过915 MHz频 段,它们之间的主要差异如表2所示。 915 MHz vs. 5. system performance comparison 跟踪和调研阶段[62-64],据笔者所知,国家高技术研 展计划(863 计划)现代交通技术领域围绕提高我 国 平的 (2011.1~2013.12) 题项目,旨在建立智能车路协同技术体系 系统、智能路侧系统、车车/车路协同信息交 互与控制、车路协同系统集成和仿真测试等关键技 术,研制支持典型应用的系统装备,从而形成我国道 路交通主动安全保障的核心技术体系。 7. 车辆自组织网络的关键技术 车辆自组织网络作为现代交通与信息领域新兴 的研究热点,涉及多个学科交叉与融合,有着非常多 的关键技术亟待研究与解决,本节仅列出部分关键技 术。 7.1. 无线接入技术 未来的 ITS旨在充分利用先进的短距离无线通信 技术,加快道路交通安全系统的研发与集成应用,在 为道路交通提供全面的安全解决方案的同时,除自主 式智能车载信息终端装置外,还必须考虑车路协调合 作方式,即通过车-X 通信技术实时获取当前道路环境 状况信息,从而更有效地 直接受益于以 DSRC、WLAN、WiMAX、红外、 蓝牙以及 2/3G等为代表的无线移动接入技术的发展 与更新。从网络层次上讲,无线接入技术一般对应于 开放系统互连/参考模型(OSI/RM) 的物理 层和数据链 路层(2/3G 和蓝牙技术除外,它们将包含整个通信协 议栈)。本小节仅对DSRC 作简要的介绍(重点关注其 物理层参数),并与其它短距离通信技术的主要性能指 标进行分析和比较。 7.1.1. 专用短距离通信(DSRC) DSRC(业 为车载环境设计开发的中/短程射频通信技术,能 够为车辆与车辆、车辆与路旁基础设施之间提供高 速、实时、准确、可靠的单/双向语音、图像及数据通 信服务,支持车辆公共安全、交通运输管理、在途信 息发布、商用货运管理以及不停车收费服务等应用 [65],从而能够显著提高道路交通的安全运行效率。它 包括一系列协议和标准,其工作原理非常类似于 RFID 技术。 目前,国际上已基本形成以欧洲 CEN/TC278、美 国ASTM/IEEE 和日本 ARIB/TC204 为核心的 DSRC/ WAVE 标准化体系,它们之间彼此互不兼容并且各自 有着不同的应用地区范围,但是从微波频谱的角度来 看,面向 ITS 应用的 DSRC 技术基本上都选择了 5.8~ 5.9 GHz射频频段,主要是因为该频段的微波信号具 有良好的频谱特征及传播特性,例如能够提供高速率 的数据传输(6~27 Mbps),通信距离可达 为了避免其它非安全相关类应用对高 相关类应用带来不必要的时延与干扰,该频段虽 为免费使用频段,但在使用之前必须事先申请许可证 ,这一点也完全不同于900 MHz、2.4 GHz和5.0 GHz Table 2.9 GHz 表2. 915 MHz与5.9 GHz系统性能比较 射频频段 915 MHz 5.9 GHz 频谱带宽 12 MHz 75 MHz 数据速率 500 kbps 6~27 Mbps 通信距离 <30 m <1 km(标称 300 m[67]) 上行链路 <4 mW <2 W 信号 功率 下行链路 <10 W <2 W 信道数目 1(使用无需申请执照) 7(使用前需申请执照) 主要应用 不停车收费 车辆安全通信、互联网接入 系统需求 专门定制芯片及软件 基于IEEE 802.11a[68] 通信类型 车路通信 车路/车车通信 通信模式 请求响应方式 请求响应/点对点方式 干扰来源 900 MHz移动通信 扩频电台、 某些雷达或卫星 雷达等 通信的上行链路 Copyright © 2013 Hanspub 31 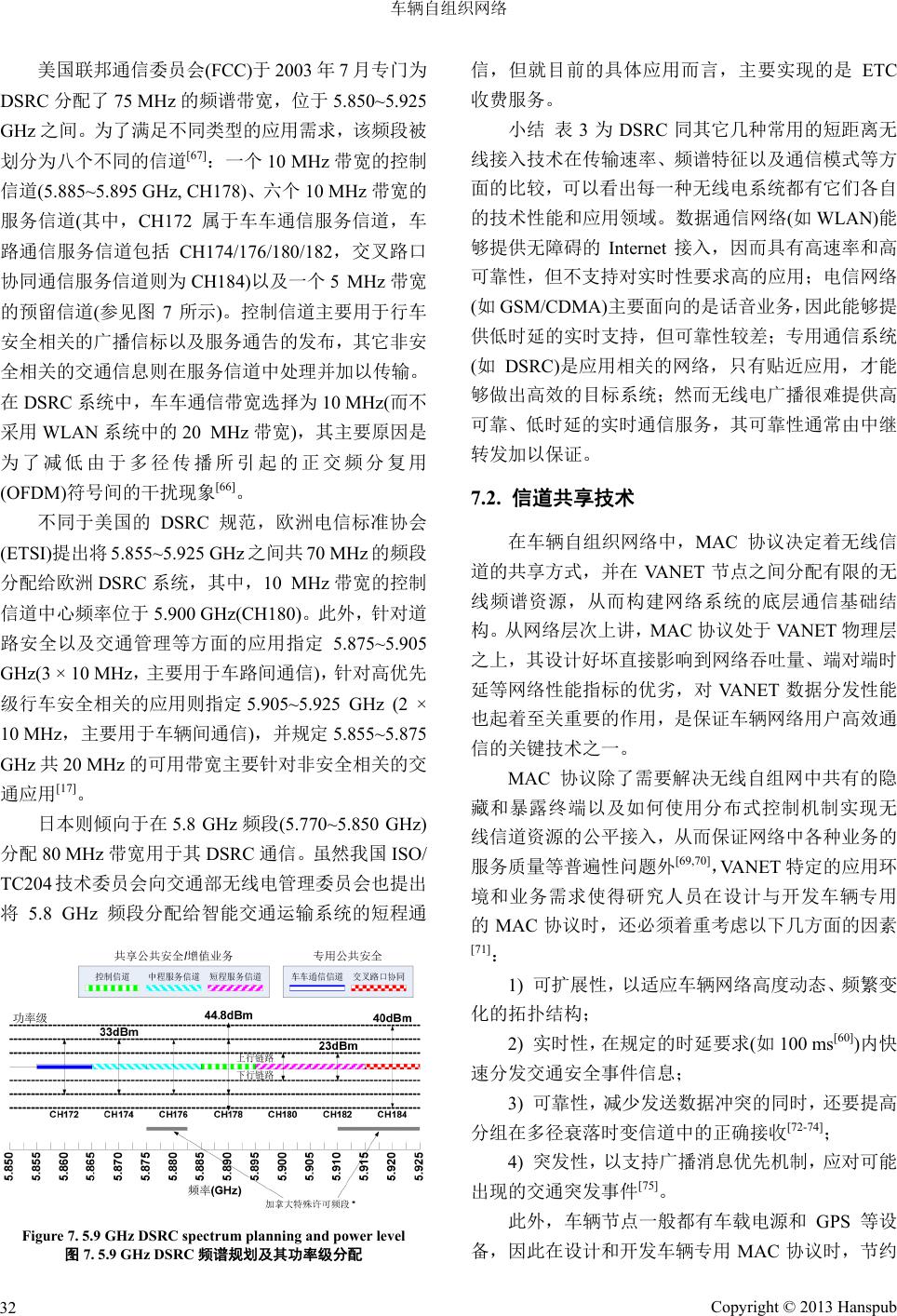 车辆自组织网络 美国联邦通信委员会(FCC)于2003 年7月专门为 DSR 的广播信标以及服务通告的发布,其它非安 全相 10 ) 分配 80 M国ISO/ TC 委员会 部无线电管理 也提出 将z频段 智能交通运输 短程通 C分配了75 MHz 的频谱带宽,位于 5.850~5.925 GHz 之间。为了满足不同类型的应用需求,该频段被 划分为八个不同的信道[67]:一个 10 MHz带宽的控制 信道(5.885~5.895 GHz, CH178)、六 个10 MHz 带宽的 服务信道(其中,CH172 属于车车通信服务信道,车 路通信服务信道包括 CH174/176/180/182,交叉路口 协同通信服务信道则为CH18 4)以及一个 5 MHz带宽 的预留信道(参见图 7所示)。控制信道主要用于行车 安全相关 关的交通信息则在服务信道中处理并加以传输。 在DSRC 系统中,车车通信带宽选择为 10 MHz(而不 采用 WLAN 系统中的20 MHz带宽),其主要原因是 为了减低由于多径传播所 引起的 正交 频分复 用 (OFDM)符号间的干扰现象[66]。 不同于美国的 DSRC 规范,欧洲电信标准协会 (ETSI)提出将 5.855~5.925 GHz之间共 70 MHz的频段 分配给欧洲DSRC 系统,其中,10 MHz带宽的控制 信道中心频率位于 5.900 GHz(CH180)。此外,针对道 路安全以及交通管理等方面的应用指定 5.875~5.905 GHz(3 × 10 MHz,主要用于车路间通信),针对高优先 级行车安全相关的应用则指定5.905~5.925 GHz (2 × MHz,主要用于车辆间通信),并规定 5.855~5.875 GHz 共20 MHz 的可用带宽主要针对非安全相关的交 通应用[17]。 日本则倾向于在5.8 GHz频段(5.770~5.850 GHz Hz 带宽用于其DSRC 通信。虽然我 204 技术 向交通委员会 5.8 GH分配给 系统的 Figure 7. 5.9 G plannel 图7. 5.划及其 信, 劣,对 关重要的作用,是保证车辆 MA 了需要解决无线自组网中共有的隐 线信道资 : 1) 可扩展性,以适应车辆网络高度动态、频繁变 化的拓扑结构; 2) 实时性,在规定的时延要求(如100 ms[60])内快 速分发交通安全事件信息; 3) 可靠性,减少发送数据冲突的同时,还要提高 分组在多径衰落时变信道中的正确接收[72-74]; 4) 突发性,以支持广播消息优先机制,应对可能 出现的交通突发事件[75]。 备,因此 ,节约 Hz DSRC spectruming an d p o wer lev 9 GHz DSRC频谱规 功率级分配 但就目前的具体应用而言,主要实现的是 ETC 收费服务。 小结 表3为DSRC 同其它几种常用的短距离无 线接入技术在传输速率、频谱特征以及通信模式等方 面的比较,可以看出每一种无线电系统都有它们各自 的技术性能和应用领域。数据通信网络(如WLAN)能 够提供无障碍的 Internet 接入,因而具有高速率和高 可靠性,但不支持对实时性要求高的应用;电信网络 (如GSM/CDMA)主要面向的是话音业务,因此能够提 供低时延的实时支持,但可靠性较差;专用通信系统 (如DSRC)是应用相关的网络,只有贴近应用,才能 够做出高效的目标系统;然而无线电广播很难提供高 可靠、低时延的实时通信服务,其可靠性通常由中继 转发加以保证。 7.2. 信道共享技术 在车辆自组织网络中,MAC 协议决定着无线信 道的共享方式,并在 VAN E T节点之间分配有限的无 线频谱资源,从而构建网络系统的底层通信基础结 构。从网络层次上讲,MAC协议处于VANET 物理层 之上,其设计好坏直接影响到网络吞吐量、端对端时 延等网络性能指标的优 VANET 数据分发性能 也起着至 网络用户高效通 信的关键技术之一。 C协议除 藏和暴露终端以及如何使用分布式控制机制实现无 源的公平接入,从而保证网络中各种业务的 服务质量等普遍性问题外[69,70],VANET 特定的应用环 境和业务需求使得研究人员在设计与开发车辆专用 MAC 协议时,还必须着重考虑以下几方面的因素的 [71] 此外,车辆节点一般都有车载电源和GPS等设 在设计和开发车辆专用MAC 协议时 Copyright © 2013 Hanspub 32 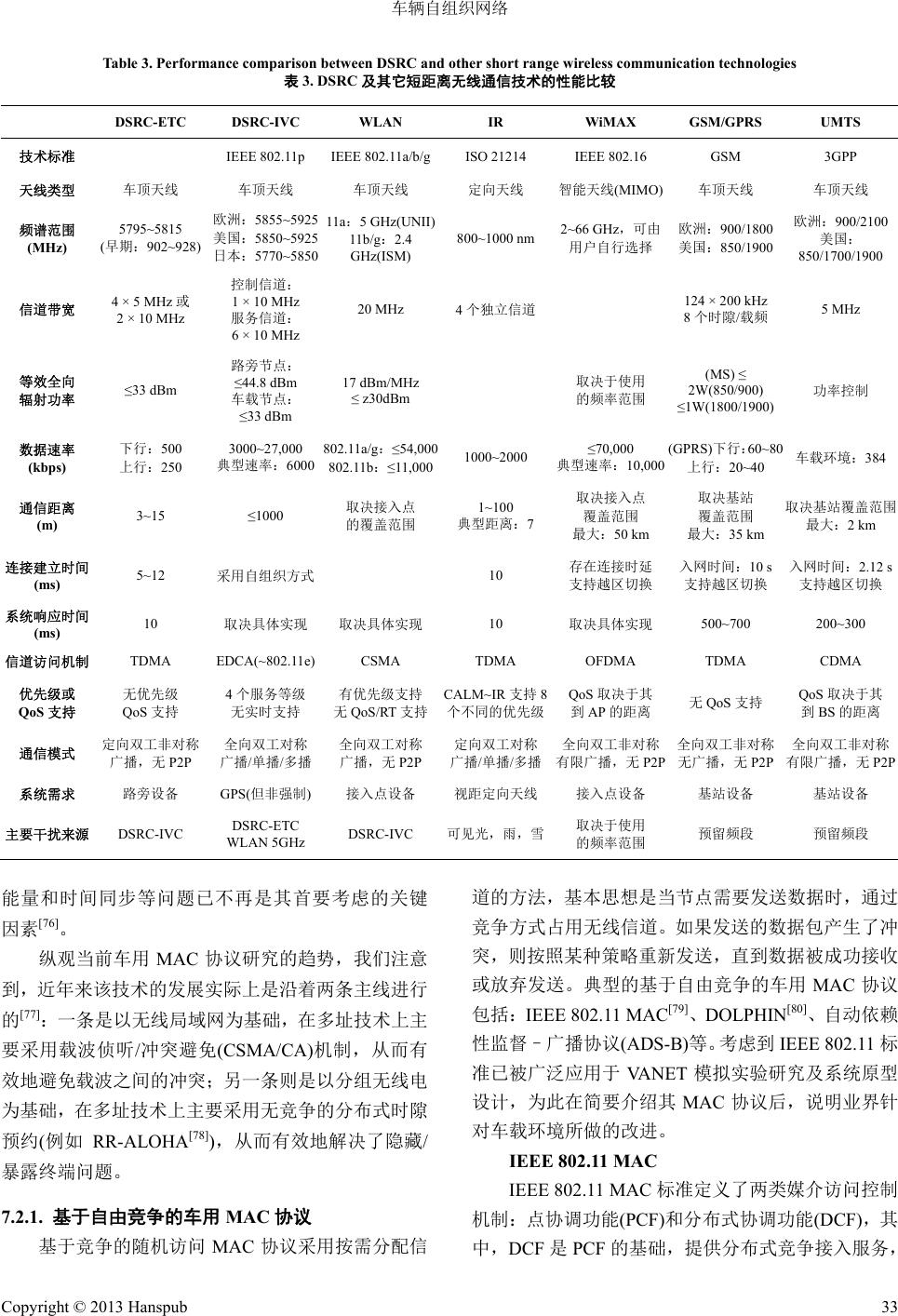 车辆自组织网络 Copyright © 2013 Hanspub 33 d oth GSM/GPRS UMTS Table 3. Performance comparison b e t ween DSRC an 表3. DSRC及其它短距离无线通 er short range wireles s c ommunication technologies 信技术的性能比较 IR WiMAX DSRC-ETC DSRC-IVC WLAN 技术标准 IEEE 802.11p IEEE 802.11a/b/gISO 21214 IEEE 802.16 GSM 3GPP 天线类型 车顶天线 车顶天线 车顶天线 频谱范围 (MHz) 5795~5815 (早期:902~928) 欧洲:5855~5925 美国:5850~5925 日本:5770~5850 11a:5 GHz(UNII) 11b/g:2.4 GHz(ISM) 信道带宽 4 × 5 MHz或 2 × 10 MHz 控制信道: 1 × 10 MHz 服务信道: 6 × 10 MHz 20 MHz 等效全向 辐射功率 ≤33 dBm 路旁节点: ≤44.8 dBm 车载节点: ≤33 dBm 17 dBm/MHz ≤ z30dBm 数据速率 (kbps) 下行 上行: 定向天线 智能天线(MIMO) 车顶天线 车顶天线 0~1000 nm 2~66 GHz,可由 用户自行选择 欧洲:900/1800 美国:850/1900 欧洲:900/2100 美国: 850/1700/1900 个独立信道 124 × 200 kHz 8个时隙/载频 5 MHz 80 4 范围 2W(850/900) ≤1W(1800/1900) 功率控制 :500 250 3000~27,000 典型速率:6000 802.11a/g:≤54,000 802.11b:≤11,0001下行:60 ~80 20~40 车载环境:384 (m) 3~15 ≤1000 取决接入点 的覆盖范围 典型距离: 取决接入点 取决基站 盖范围 最大 10 s 入网时间:2.12 s 支持越区切换 TDMA OFDMA TDMA CDMA 优先级或 QoS 支持 QoS 支持 无实时支持 S/RT 支持个不同的优先级到 AP 的距离 无QoS支持 S取决于其 到BS 的距离 通信 定向双工非对称 广播,无 P2P 全向双工对称 广播 全向双工对称 定向双工对称 广播 全向双工非对称 有限广播,无 全向双工非对称 无广播,无 P2P 全向双工非对称 有限广播,无 P2P 系统需求 路旁设备 GPS(但非强制) 接入点设备 视距定向天线 接入点设备 基站设备 基站设备 主要干扰来源 DSRC- 可见光,雨,雪 取决于使用 预留频段 取决于使用 的频率 (MS) ≤ 000~2000 ≤70,000 典型速率:10,000 (GPRS) 上行: 通信距离 1~100 7 覆盖范围 覆盖范围 取决基站覆 :2 km 最大:50 km 最大:35 km 10 存在连接时延 支持越区切换 入网时间: 支持越区切换 连接建立时间 (ms) 5~12 采用自组织方式 系统响应时间 (ms) 10 取决具体实现 取决具体实现 信道访问机制 TDMA EDCA(~802.11e) CSMA 10 取决具体实现 500~700 200~300 无优先级 4 个服务 于其 Qo等级 有优先级支持 无Qo CALM~IR支持 8QoS 取决 模式 /单播/多播广播,无P2P /单播/多播 P2P DSRC-IVC ETC WLAN 5GHz DSRC-IVC 的频率范围 预留频段 能量和时间同步等问题已不再是其首要考虑的关键 因 纵观当前车用 MAC 协议 势,我们注意 到, 该技术的发展实际两条主线进 的是以无线局域网为 多址 要采用载波侦听/冲突避免(CSMA/CA) 机制,从而有 效地避免 之; 为基础,在多址技术上主要采用无竞争的分布式时隙 预约如RR-A A[78]),从效地解/ 暴露终端问题。 7.2.1. 自由竞争的车用 MAC 协议 基于竞争的随机访问 MAC 协议采用按需分配信 道的方法,基本思想是当节点需要发送数据时,通过 占用无线信道。如据包产生了冲 突,则按照某种策略重新发送,直到数据被成功接收 或放弃发送。典型的基于自由竞争的车用 MAC 协议 包括:IEEE C[79] [80] 赖 性监督–广播协议(ADS-B)等。考虑到IEEE 802.11 标 泛应 究 设计,为此在简要介绍其MAC 协议后,说明业界针 境所 。 IEEE 8 8 机制:点协调功能(PCF)和分布式协调功能(DCF),其 中,DCF 是PCF 的基础,提供分布式竞争接入服务, 素[76]。 研究的趋 近年来上是沿着 行 [77]:一条基础,在技术上主 载波间的冲突 另一条则是以分组无线电 (例LOH 而有决了隐藏 基于 竞争方式 果发送的数 802.11 MA、DOLPHIN 、自动依 准已被广用于 VA N E T模拟实验研及系统原型 对车载环 做的改进 02.11 MAC IEEE02.11 MAC标准定义了两类媒介访问控制  车辆自组织网络 PCF 则提供有基 施支持竞 务。 802.11 DCF是基于 CSMA/CA 多址接入技术的协 议 侦听机制由物理载虚 共同完成,其用的物理 硬件,通节信 情 法不能够有效地问 拟载波侦 的 息进 ,判断无线信道将被 从而确定自 发送需要延迟多长的时间。因此,网络中每个节点 都必须维护一个网络分配矢量(NAV),它是一个定时 大小预示着当前正在进行的通信所需持续 的时间 I S),可以看出SIFS 具有最高的优先 设置各自的 NAV 值。当 信源并等待 SIFS 的时间之后, 开始 信道中,通过 RTS/CTS/DATA/ACK 四次握手 过程 信道时可能造成的冲突。节点进入退避状态将启动一 个退避计时器,当计时到达退避时间后结束退避状 态。 退避状检测到信道空闲时才进行 计时。如果信道忙,退避计时器则停止计时,直到检 DI 计 且 小 80 80的自模式在 立 基本服务集(IBSS)时,效率低下(其主要表现为耗时)、 隶属于某个 BSS。这样,当 VANET 节点 位于 地图增 帧发 VE BSS,不 是,WAVE 站点 不必周期性的 。由于其中已经包含了所需的 全部信息,一方面可以了解 WAVE BSS中 全认证则由位于 高层机制来保 证,这进一步减少了系统的通信开销。 3) BSSID扩展用法。到行车安全 VA N ET 关键应用, 节点配置为特定 ; 时,VANE 。这一点完 全不同于的 802.11 MA即当节点处于某 BSS 时,它便会掉来自其它 BSS 的分组包。 础设的轮询式无 争接入服 ,其载波波侦听和拟载波侦听 中物理载波侦听有赖于所使 层 过 点接收到的 号电平来确定信道的占用 况,该方解决隐藏终端题[72];虚 听则是对接收到MAC 帧信 行解析的 基础上 身 占用的时间, 器,其数值 。当其中任何一个载波侦听功能指示信道忙时 (例如 NAV 不等于零),则认为信道忙;否则,认为信 道空闲。 802.11 MAC采用不同的帧间间距(IFS),从而实 现对不同分组或业务提供接入信道的优先级控制。这 些帧间间距按照从短到长的顺序分别为:短帧间间距 (SIFS)、PCF帧间间距(P FS)、DCF 帧间间距(DIFS)、 扩展帧间间距(EIF 级。 根据 CSMA/CA 协议,每个车辆节点在尝试发送 数据之前,首先侦听信道是否空闲。如果侦听到信道 已经空闲了 DIFS 的时间,则立即发出包含信源节点 ID 以及未来整个通信持续时间的请求发送(RTS)分 组。所有接收到RTS 分组的邻居车辆则根据解析出的 通信持续时间分别设置各自的NAV 值。如果信宿节 点准备就绪,在接收到 RTS 分组并等待 SIFS的时间 后,则立即发出包含后续通信所需时间的清除发送 (CTS)分组。所有接收到 CTS 分组的邻居节点会根据 解析出的通信持续时间再次 节点接收到 CTS分组 传输数据分组。信宿节点则在正确接收来自信源 节点的 DATA分组并等待 SIFS 的时间之后,再向信 源节点发送一个确认应答(ACK)信号。所有接收到 ACK 分组的节点将各自的 NAV 值清零。因此,在单 一共享 ,从而实现了分布式业务数据的接入过程。 如果信道忙,则执行二进制指数退避(BEB)算法, 然后重新检测信道,这样能够避免在各站点之间竞争 算法复杂且系统开销大,不适合车辆之间的专用通 信。车车通信要求具有的瞬时数据交换能力,无法通 过首先扫描基本服务集(BSS) 信标信道,然后再执行 一系列握手过程来得以实现。为此,IEEE 802.11p基 于802.11a,并对 MAC 层作了以下主要改进[66]: 1) WAVE模式。所有支持 802.11p 的无线设备默 认都守候在同一信道(例如控制信道)内,并配置基本 服务集标识(BSSID)域为全 1,以支持车辆间的安全通 信。该模式允许 VA N E T节点以广播方式收发数据帧, 不需要事先 在 态下,只有当 测到信道空闲时间大于 FS 后才继续 时。当多个 节点推迟 进入随机退避状态时,则利用随机函数选 择具有最 退避时间的节点作为竞争优胜者。 IEEE2.11p IEEE2.11 MAC组织工作构建独 彼此的通信范围内时,便可以立即通信,从而减 少了系统的额外开销。 2) WAVE BSS。如果VANET 节点需要获取某项 服务(如数字量更新服务)时,它首先发送一个 服务请求分组,WAVE 站点则根据接收到的请求分组 采用信标布 WA 同的 重复广播 因此接收端 提供的服务以决定是否需要获取该项服务,另一方面 也可以根据其提供的信息来配置VAN E T节点(例如服 务所在信道等)以完成服务的连接过程。相关服务的安 802.11 MAC 之上的 考虑 是 首要解决的 为此,当 BSSID,即隶属于某个 WAVE BSS时,其仍然支持全 为1的通配型 BSSID 换言之,WAVE 模式与 WAV E BSS 可以共存,因此,在进行数字地图增量更新的同 T节点仍可对外发送广播信标 传统 C机制, 个特定的 自动过滤 成员节点 Copyright © 2013 Hanspub 34  车辆自组织网络 4) 分布式系统服务。在 IEEE 802.11 标准中定义 的分布式系统为通过 AP在相同扩展服务集(ESS)内不 同B 7.2.2. 车用 MAC 协议 是实现信道分配简单成熟的机 制,例基于的MAC 协议。 接收 洲CarTALK-2000(随后又被 德国 [78] LOHA 可以 在不 内的所有节点共同组成一个全 连通 点都必 点的 FI和自 己的 )到时隙(k-1)中,至 少接 隙(k-N)标记为忙,则第 k个时 隙被 SS 之间的相互连通,即移动站点必须位于同一个 网段内。这显然不能满足车载计算机在城市或城间范 围内高速运动时仍需要保持与网络通信的要求。为 此,WAVE 模式下的车载通信终端,不管是否已经隶 属于某个 WAVE BSS,都能够发送/接收含有通配型 BSSID 的数据帧,这时帧控制字段中的 ToDS 和 FromDS比特位必须设置为 00;若为某个已知的 BSSID,则可以用来访问分布式系统服务。 基于时分多址的 时分多址(TDMA) 如蓝牙网络便采用了 TDMA 它是在一个宽带的无线载波上,将时间分成周期性的 帧,每一帧再分割为若干时隙(无论帧或时隙都是互不 重叠的),每一个时隙就是一个信道,从而分配给一个 用户使用。系统根据一定的时隙分配原则,使各个车 载通信终端在每帧内只能够按照指定的时隙发送或 数据。在满足定时和同步的条件下,各个节点之 间的通信互不干扰。典型的基于TDMA 机制的车用 MAC 协议包括:ADHOC-MAC[81,82],它非常适合车 辆网络对通信实时性的需求,但网络扩展性较差,并 且节点间需要严格的时间同步。 ADHOC-MAC ADHOC-MAC 是欧 FleetNet 等)研究项目采用的 MAC 协议,其基本 实现为可靠的时隙预约 ALOHA(RR-ALOHA)协议 ,并根据车辆网络的特点对时隙预约 ALOHA(R- ALOHA)协议作了较大改进,通过全分布式的媒体接 入控制,即动态时分多址接入机制,实现在同步自组 网中建立无竞争的、可靠的单跳广播信道,通过帧信 息(FI)的交互与更新,使所有邻节点都能够准确地掌 握时隙分配情况,从而较好地解决了隐藏终端和暴露 终端问题,通过快速预约附加带宽的方式占用其它空 闲信道,还能够提供高带宽利用率的点对点通信以及 具有最少转发节点的多跳广播服务。RR-A 同的物理层标准下使用(即独立于物理层[76]),尤 其适合于采用时隙帧结构的物理层,如通用移动通信 系统陆地无线接入时分双工(UTRA-TDD)。UTRA- TDD 最初是为集中式网络体系架构而设计开发的, CarTALK-2000 项目解决了许多关键技术性问题(如分 布式同步技术、功率控制机制、无线资源管理等)[83], 从而将其成功地移植到VA N E T中。 RR-ALOHA 协议的基本思想是[78]:假设一帧由 N 个时隙组成,并且单跳 的簇。当有节点需要加入时,先侦听一帧的时间, 然后选择一个空闲时隙发送一个分组来预约这个时 隙。如果邻居节点正确接收到了该分组,则在它的 FI 中标示出来。可以看出 FI是发送节点感知的前一帧的 时隙状态信息。当新加入的节点从一帧时间内收到的 所有 FI中知道邻节点都已正确接收到分组时,即认为 预约成功,从而将每帧中的该时隙作为其基本信道 (BCH),直到节点离开 网络, 在此期 间,其 它节点 不 能够访问该时隙。其中 BCH 主要用于传送 FI、其它 信令信息以及承载有效载荷。在每一帧中,节 须在自己的BCH 中发送FI,并根据邻节 信道使用情况及时更新FI。当 BCH 提供的基本 带宽不能够满足业务需求时,节点可以通过预约附加 信道的方式占用其它空闲信道,以满足业务的 QoS要 求。如果是点对点通信,节点还可以预约PTP 信息进 行传送,以实现相邻一跳簇内的时隙复用,从而提高 了信道的利用率。 在RR-ALOHA协议中,FI 的发送与更新是其关 键技术之一。FI 是一个由 N个时隙状态信息组成的向 量,它由节点对前 N个时隙侦听获得。当分组被正确 接收或发送时,相应的时隙标记为忙(BUSY),否 则 标 记为空闲(IDLE),其中,在忙时隙的 FI 中还包含发送 节点的 ID 等信息。在从时隙(k-N 收到一个 FI将时 标记为已预约(RESERVED),否则标记为可用 ( AVA I LA B L E )。显然,一个可用时隙是可以被访问的。 当节点 j试图接入某个可用时隙时,在其接收到的所 有FI 中,节点 j用于传送的时隙均被标记为忙,则认 为传送成功,否则传送失败。 图8中的 7个节点分别隶属于三个单跳(OH)簇 A、B、C,位于同一个OH 簇内的所有节点可以直接 通信,不同簇内的节点如果不属于所有簇的公共子集 则不能够直接通信,只有位于公共子集的节点才能够 与簇内的所有节点通信,并且所有的 OH簇形成一个 两跳(TH)簇。以节点 1为例,它通过侦听信道可以知 Copyright © 2013 Hanspub 35 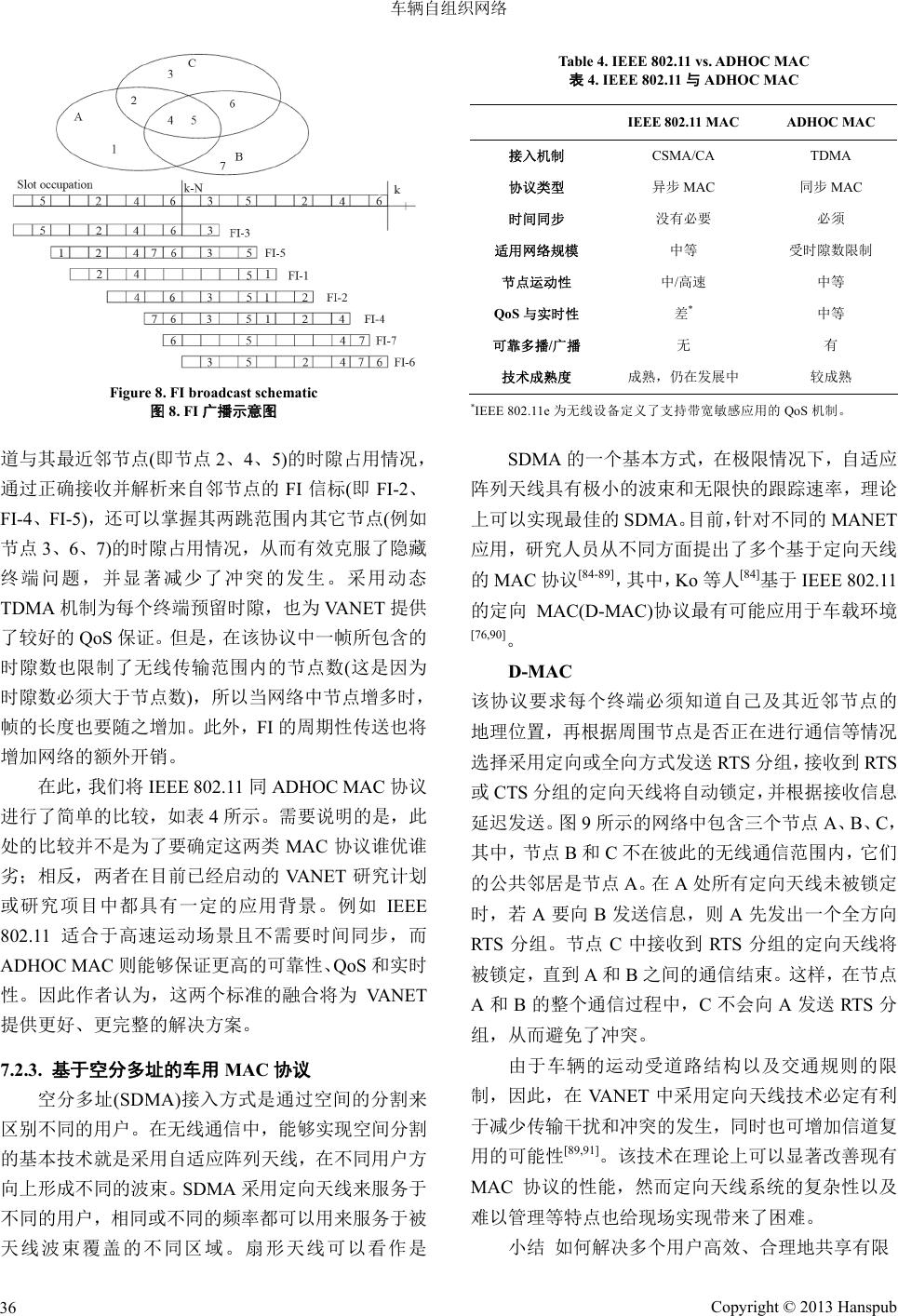 车辆自组织网络 Figure 8. FI broadcast schematic 图8. FI广播示意图 道与其最近邻节点(即节点2、4、5)的时隙占用情况, 通过正确接收并解析来自邻节点的FI 信标(即FI-2、 FI-4、FI-5),还可以掌握其两跳范围内其它节点(例如 节点 3、6、7)的时隙占用情况,从而有效克服了隐藏 终端问题,并显著减少了冲突的发生。采用动态 TDMA 机制为每个终端预留时隙,也为 VA N ET提供 了较好的QoS 保证。但是,在该协议中一帧所包含的 时隙数也限制了无线传输范围内的节点数(这是因为 时隙数必须大于节点数),所以当网络中节点增多时, 帧的长度也要随之增加。此外,FI 的周期性传送也将 增加网络的额外开销。 在此,我们将 IEEE 802.11 同ADHOC MAC 协议 进行了简单的比较,如表 4所示。需要说明的是,此 处的比较并不是为了要确定这两类MAC 协议谁优谁 劣; 都可以用来服务于被 天线 相反,两者在目前已经启动的VA N ET研究计划 或研究项目中都具有一定的应用背景。例如 IEEE 802.11 适合于高速运动场景且不需要时间同步,而 ADHOC MAC 则能够保证更高的可靠性、QoS 和实时 性。因此作者认为,这两个标准的融合将为 VA N E T 提供更好、更完整的解决方案。 7.2.3. 基于空分多址的车用 MAC 协议 空分多址(SDMA)接入方式是通过空间的分 割来 区别不同的用户。在无线通信中,能够实现空间分割 的基本技术就是采用自适应阵列天线,在不同用户方 向上形成不同的波束。SDMA 采用定向天线来服务于 不同的用户,相同或不同的频率 波束覆盖的不同区域。扇形天线可以看作是 Table 4. IEEE 802.11 vs. ADHOC MAC 表4. IEEE 802.11与ADHOC MAC IEEE 802.11 MAC ADHOC MAC 接入机制 CSMA/CA TDMA 协议类型 异步MAC 同步 MAC 时间同步 没有必要 必须 适用网络规模 中等 受时隙数限制 节点运动性 中/高速 中等 QoS 与实时性 差* 中等 可靠多播/广播 无 有 技术成熟度 成熟,仍在发展中 较成熟 *IEEE 802.11e 为无线设备定义了支持带宽敏感应用的 QoS 机制。 SDMA 的一个基本方式,在极限情况下,自适应 阵列天线具有极小的波束和无限快的跟踪速率,理论 上可以实现最佳的 SDMA。目前,针对不同的MANE 应用,研究人 于定向天线 MAC 协议[84-89],其中,Ko 等人 ]基于 IEEE 802.11 息,则 A先发出一个全方向 RTS 系统的复杂性以及 。 小结 如何解决多个用户高效、合理地共享有限 T 员从不同方面提出了多个基 的[84 的定向MAC( D- MA C)协议最有可能应用于车载环境 [76,90]。 D-MAC 该协议要求每个终端必须知道自己及其近邻节点的 地理位置,再根据周围节点是否正在进行通信等情况 选择采用定向或全向方式发送RTS 分组,接收到 RT S 或CTS 分组的定向天线将自动锁定,并根据接收信息 延迟发送。图 9所示的网络中包含三个节点A、B、C, 其中,节点 B和C不在彼此的无线通信范围内,它们 的公共邻居是节点 A。在 A处所有定向天线未被锁定 时,若 A要向B发送信 分组。节点 C中接收到 RTS 分组的定向天线将 被锁定,直到 A和B之间的通信结束。这样,在节点 A和B的整个通信过程中,C不会向 A发送 RTS 分 组,从而避免了冲突。 由于车辆的运动受道路结构以及交通规则的限 制,因此,在 VANET 中采用定向天线技术必定有利 于减少传输干扰和冲突的发生,同时也可增加信道复 用的可能性[89,91]。该技术在理论上可以显著改善现有 MAC 协议的性能,然而定向天线 难以管理等特点也给现场实现带来了困难 Copyright © 2013 Hanspub 36  车辆自组织网络 Figure 9. PrinAC protocol 图9. D- 的无源,即 M的设计一直都是无线 移动自组织网络(当然也包括 VAN E T ) 一, 直接影响吐量、端对端时延等 性能指标由于车的特性, 得车 用的设计面临 具挑战性的技术问 题。不同的网络环境也有着不同的应用需求和限制条 件,因此不存在一个适用于所有车辆网络的 MAC 协 还是 采用 [92] 网络是由一组具有路由功能的车辆 节点 布式无线多跳通信网络,它可以不依赖 任何预设 络基础设施,网络中的每个节点既是终 端,也是中继器。当信源节点与信宿节点之间不能够 效地利用网络带宽,这些网 络路 般都安 装有 部拓扑以及全局定位信息的基础上选择最佳路径,并 能够适应网络的快速拓扑变化,它对应于 OSI 七层模 型中的网络层。 针对不同的车辆网络应用,研究人员提出了不同 的数据分发协议。但到目前为止,仍缺乏一个完整和 清晰的协议分类。本小节从具体应用的角度出发,根 据不同应用对车辆网络各种特性的敏感度不同,将其 粗略分为单播型、广播型和地理多播型数据分发协议 [94-96]。有关VANET 路由的不同分类方法,读者还可 以参见文献 .3.1. 基于单播机制的数据分发协议 地 随机转发机制可 以增强协议的鲁棒性。然而,在更为真实的车辆运 曼哈顿式的城市运动以及随着 车载 [103] 以指示消息沿着预定的道路网图进行传播,在减少消 ciple of D-M MAC 工作原理 线信道资 AC 协议 的关键技术之 它的好坏 到网络吞 的优劣。 辆网络独有使 MAC 协议 许多极 议。无论是采用基于自由竞争的信道分配机制, 基于 TDMA/SDMA 的固定信道分配机制,或者 其它类型的 MAC 协议(如针对车辆编队行驶的无线令 牌环协议 ),都必须根据具体应用选择不同的协议类 型来设计相应的MAC 协议。 7.3. 数据分发技术 车用自组织 组成的分 的网 直接通信时,则需要借助其它中间节点的辅助,采用 存储转发机制有利于克服车辆网络的间歇连通性问 题[93]。因此数据分发协议也是 VANET 中不可缺少的 一个重要部分,它负责将数据分组从信源节点通过车 辆网络转发到目标节点,其设计的好坏直接影响到通 信业务服务质量的各项性能指标,影响到通信系统资 源使用的有效性和可靠性。 车辆网络中的数据分发主要包括两个方面的功 能:寻找源节点与目标节点间的优化路径,并将数据 分组沿着优化路径正确转发。VANET 的首要目标是 提供高服务质量和公平高 由协议的主要任务是寻找从源节点到目标节点 间通信延迟最小的路径,同时提高整个网络的信道利 用率,避免产生通信拥塞并均衡网络流量等,这类似 于传统的 MANET和WLAN 等无线网络。然而,在 VA N ET中,节点的能量消耗问题已不再是这类网络 考虑的重点,同时车辆节点数目往往很大且一 GPS 等定位终端,因此数据分发协议要能够在局 [9,63]。 7 目前,MANET 路由协议的研究已经成为无线自 组织网络的热点之一,对其路由方法的讨论也越来越 深入,并且已经提出了多种针对MANET 的路由方案, 主要包括先应式路由(如目标节点序列号距离矢量 DSDV[97]、最优链路状态路由OLSR[98])、反应式路由 (自组网按需距离矢量路由 AODV[99]、动态源路由 DSR[100])、地理路由(贪婪边界无状态路由 GPSR[101]) 以及混合 理路由(如终端路由TR)等,然而它们却不 能直接应用于节点高速运动且非均匀分布的车辆网 络内。在车辆自组织网络中,基于地理位置的路由协 议是首选的数据分发机制,同时引入 [102] 动场景中,例如类似于 存储器的广泛应用,需要对这类使用存储转发机 制的协议设计得当,否则有可能出现某些过时的信息 覆盖掉较新的信息。Burgess 等人 采用优先级策略 来确定分组数据包的传递顺序:①邻居节点的数据包 具有最高的优先级;②其次为包含有路由信息的数据 包;③确认交付的数据包;④转发次数较少的数据包; ⑤转发次数较多,但仍能够正确转发的数据包。Zhao 和Cao[104]提出的车辆辅助数据传输(VADD)协议也是 基于存储转发的思想,并且运用车辆运动的可预测性 Copyright © 2013 Hanspub 37  车辆自组织网络 息转发时延的同时还显著提高了分组转发的成功率。 Naumov 和Gross[105] 基于混合地理路由协议(即 PGB 7.3.2. 基于广播机制的数据分发协议 广播机制是车辆网络中使用最为频繁的一种数 据分发技术 方面的应用主要 方式 紧急事故、路面环境以 况等信息。同时广播机制也通常运用于单播 协议的路 现阶段,以期寻找信源和信宿之间的优 化路径 节点密度较高时,它又将导致大量带宽资 源的消耗以及较长的端对端延迟。 依据各节点在车辆网络中扮演的角色以及关于 下一跳转发节点的选择方法的不同,VA N E T广播协 议可以分为 :基于泛洪的广播、基于分簇的广播、 基于列表的广播以及基于距离的广播,如图 10 所示, ,其工作原理如下:源节点向其 所有的邻居节点广播分组,中间节点判断自己是否是 接收到该分组, 则继 +AGF)提出的连接感知路由(CAR),在路由发现 阶段通过泛洪机制找出源节点与目标节点间的一系 列界点,并采用地理贪婪路由算法在指定路径中转发 分组包。 ,例如面向道路行车安全 使用广播 报告实时交通、 及天气状 由发 。当 [14,64] 其中大多数算法都是假定车辆节点能够通过GPS获 知自身的位置信息。 泛洪技术是最简单的广播业务类型,它不需要已 知任何网络拓扑信息 目标节点。如果不是,并且又是第一次 续广播;否则直接丢弃。在车辆节点高速运动的 场景中,安全信息只能够通过定向泛洪策略实现;但 当节点密度增加时,带宽的消耗也会急剧增加。因此 不加限制地周期性广播必将导致分组在全网范围内 重复发送。VANET 中对泛洪方案的改进之一是:在 分组的智能广播中引入隐式确认机制(如I-BIA[29]),即 当前方车辆接收到来自后方的同一分组时,则由其后 的车辆节点负责继续向后广播,从而有效抑制了重复 广播的节点数目。采用泛洪方式传递信息,具有很大 的盲目性,通信负荷重且端对端时延长,但它也是将 分组扩散到整个网络的最健壮和最基本的方法。 随着网络规模的扩大以及节点移动性的增强,节 点在非层次化路由协议维护阶段的信息交换也越来 越频繁,继而导致网络时延的增大和网络拥塞。分簇 是克服以上缺点的常用方法(如基于集群的位置路由 并在每个子集中选择一个簇头,用以构成高一层次的 Figure 10. VANET broadcast protocols 图10. VANET广播协议 虚拟骨干网,从而实现网络的层次化;同一簇内的节 点之间可以直接通信,不同簇内的节点之间的通信则 CBLR[106]),它通过将网络中的节点划分为多个子集, 需要经由簇头和网关节点实现。该方案在网络拓扑变 化较小时才具有较好的性能,否则会因为频繁地重组 并重选簇头等过程而使网络 恶化。 节点列表, 并且通过 / 也将增加端对端 时延。最 (DBRS) 选举产生。被选取的转发节 点通常位 簇内成员 性能 网络中的所有节点都将维护一个邻居 请求 响应方式周期性地更新。下一次转发节 点由前一次转发节点确定。当节点低速运动时,该方 案在网络通信量及端对端延迟方面显示了优越的性 能,但当网络拓扑变化频繁时,其性能将急剧恶化, 因此不适合应用于高速运动的车辆网络。特别是当节 点移动性增加时,节点间控制消息的交换周期缩短, 这意味着消耗网络带宽资源的同时, 具代表性的是 Korkmaz 等人[107,108]提出的城 市多跳广播(UMB)协议。 每次只允许一个节点参与分组转发具有相对于 其他几种广播方案更好地性能,其网络通信量少、端 对端延迟小。在这类方案中,转发节点由基于距离的 转发节点选择 算法 于前一次转发节点传输范围的边界,因而具 有最短的等待时间,其代表性的基于距离的广播方案 有DDT、RBM 和ODAM。然而,在稀疏网络中,如 果转发节点并非边界节点的话,那么转发节点将花费 更长的等待时间。此时,转发节点必须等待直到时间 超期,这样端对端延迟反而会变长。 7.3.3. 基于地理多播机制的数据分发协议 基于位置的多播路由也称为地理多播路由[109],它 提供从源节点到某特定地理区域(ZOR)内的所有目标 节点的广播。前述的许多 VANET 应用直接受益于地 理多播服务,例如当前方车辆发生交通异常后,事故 车辆仅对正在驶向该事故地点的所有车辆广播紧急 Copyright © 2013 Hanspub 38  车辆自组织网络 告警消息,以提醒其注意前方潜在的危险,并提前做 好防范工作;或者当前方道路发生交通拥塞后,受阻 车辆 数据分发,并且综合了存储转发、基于车道轨迹的转 发以及基于地理位置的转发三者的优势。在 MDDV 算法中,转发节点选择距离目标最近的节点作为其下 一跳邻居,这种机制被称为 MFR (Most Forward within Radius),从而使到达目标节点的跳数最少。 Sormani 等人[111]基于信息传播函数产生的虚拟势 场概念,提 方法,即 点首先估计其在势场中的位置,并选择势场中具有 1) 服务 外大部分 真过程,一般都假定节点 通信距离 是VA N ET迫切需要解决的问题。 为细节描述程度 的不 ,并规 定了 、交通仿真模型、统计调研模 型和 通行为 格式也彼 不兼容。统计调研模型则通过大规模问 卷或在线 获取人的行为及其特征,但由于工作量 巨大,可操作性差。运动轨迹模型虽然可以随时重现 真实的车 动行为,但却不具外推性,例如针对公 交系统的运动轨迹就不适用于私家车的运动模拟,此 外通过大规模现场实验获得一定数量的车辆轨迹数 将对正在驶向该拥塞路段的所有车辆广播交通 路况信息,以提醒驾驶员及早变更行车路线,从而有 效地避免交通拥塞的进一步恶化。 Wu 等人[110]提出的以车辆运动为中心的数据分发 算法(MDDV),旨在利用车辆节点的运动特性来进行 出了在 息的新指定路径中传递信 节 极小值的节点作为其下一跳转发节点,从而缩小了数 据分组传送的范围。 Maihöfer 等人[112]提出了持续性地理多播的概念, 即对某段时间内位于特定区域中的所有节点持续广 播服务,因而特别适用于基于位置的服务(LBS)。文 中详细讨论了设计空间、语义以及三种解决方案: 器用来存储地理多播信息;2) 目标区域内指定的 节点可以临时担当服务器的作用;3) 每个节点存储所 有接收到的地理多播分组,同时也存储所有邻居节点 及其位置表信息。 小结 目前大部分文献都是采用协议设计与仿真 验证相结合的研究方法,提出的车用信息分发协议缺 乏对 VA N ET动态拓扑特性的建模分析,也缺乏深入 分析影响协议性能(如可靠性、实时性、可达性、资源 利用率等)的各种因素及其相互关系。此 文献 为了简化理论分析或实验仿 相等、链路路径对称且信息传输可靠,然而 无线信道受外界环境干扰严重(如具有较高的误码率、 传输功率摄动大、时延抖动非均衡等),加之 GPS 信 号失效以及高速移动节点间的多普勒效应等,使得车 辆自组织通信在实际应用中仍面临着严峻的技术挑 战。因此,如何针对车辆网络中不同交通信息的应用 需求,提出具有较强可扩展性和鲁棒性,同时兼顾可 靠性、实时性、资源利用率的单跳或多跳路由协议, 7.4. 其它关键技术 7.4.1. 车辆运动建模 车辆运动模型主要描述车辆节点高速、受限的约 束运动特征,预测其在场景中的时空位置分布并用来 评估节点运动对自组网通信协议性能的影响。 虽然在真实环境中对所开发的协议或算法进行 测试与评估是至关重要的一步,但是在协议的设计和 开发阶段以及对分析模型的验证与完善阶段,研究人 员会首先考虑通过模拟仿真代替大规模现场实验[113]。 因此尽可能真实地反映车辆节点的运动行为便是 VA N ET模拟中最为重要的一个方面。 根据运动模型对交通要素和行 同,可大致分为微观和宏观运动模型[114]。其中, 微观运动模型以单个车辆为研究对象,车辆在道路上 的跟车、超车以及车道变换等微观行为能够得到较真 实的反映,其特征参数主要包括车头时距和车头间 距;宏观运动模型则基于流体动力学理论描述交通流 作为整体所表现出的宏观运动特征,它仅考虑了诸如 道路、交叉路口、交通信号灯等运动约束因素 交通流量、车辆密度和平均运动速度三者之间的 量化关系。因此,微观交通模型是VA N ET研究中较 理想的选择。 根据车辆运动生成方法的不同,微观交通模型又 可以分为数学解析模型 运动轨迹模型[115]。其中,数学解析模型是交通仿 真中最为重要的一类模型,它通过建立一系列数学表 达式,以期反映真实的物理作用。Fiore[116]将此类模 型进一步细分为随机模型、交通流模型、车辆跟驶模 型、排队模型和行为模型。数学模型的解析表达式通 常比较复杂,缺乏对驾驶员行为的真实性描述,为了 验证其准确性还需要同真实的车辆运动做比较。交通 仿真模型借助微观交通仿真软件研究宏观和微观交 ,然而遗憾的是,在商业化的交通仿真软件中 不能够直接进行网络通信模拟,并且两者的运动数据 此互 调查 辆运 Copyright © 2013 Hanspub 39  车辆自组织网络 据代价也太大。 7.4.2. 无线信道建模 无线传播模型描述无线信号通过空间传播时遭 受的各种衰落和干扰现象,预测接收信号的功率及其 传输内容的完整性,并对无线系统进行设计、仿真与 规划。 无线信号通过空间传播时会遭受各种衰落现象, 主要涉及两个重要方面,即大尺度路径损耗和小尺度 衰落由于传播距离的路径损耗 或传播环境(如高大建筑物)的遮挡所致,它用于预测 覆盖范围,通常与射频频率无 关; 辆之 间的 度路径损耗 模型 用 概率分布是Nakagami-m分布[123,124], 当m 态、逼真地仿真交通流和交通事故等各种交通现象, NS-2、GloMoSim)并无接口,加之 格式也彼此互不兼容,因此国 真(TraNS) 平台实现了城市交通模拟 (SUM[129] [130] 、数据分发和系统建模等技术外,还有许多关 键技 参考文献 (References) [2] I. F. Akyildiz, W. Su, Y. Sankarasubra, et al. Wireless 衰落[73]。其中,大尺度 平均场强并估计无线 小尺度衰落则由于无线电波在空间传播时存在反 射、绕射和衍射等机制,从而造成信号经由多条路径 到达接收端叠加形成,与无线频率有关。加之车 相对运动会引起随机频率调制,这是由多径分量 存在的多普勒效应引起的,因此信号经由不同方向传 播时,其多径分量也将造成接收机信号的多普勒扩 展。 目前,在移动无线信道建模方 面, VA NE T研究 人员仍主要使用 NS-2 中已经实现的大尺 ,例如地面反射双线模型[74,117-119]和对数正态阴影 模型[120-122]。近几年来,研究人员也开始采相对复 杂的统计模型来较精确地描述无线传播的多径衰落 现象。其中,瑞利分布是最常见的用于描述平坦衰落 信号接收包络或独立多径分量接收包络统计时变特 性的一种分布类型。众所周知,两个正交高斯噪声信 号之和的包络服从瑞利分布。当存在一个主要的稳定 信号分量,例如视距传播路径时,则小尺度衰落的包 络服从莱斯分布。当确定信号的功率与多径分量方差 之比趋于 0时,莱斯分布则退化为瑞利分布。另一个 广泛应用的场强 = 1 时退化为瑞利分布。 7.4.3. 协同仿真平台 车辆通信网络协同仿真平台主要由两大部分组 成:微观交通仿真软件和网络通信模拟软件[125],前 者 用以产生实际的车辆运动数据,后者则用以产生实际 的无线通信行为。 微观交通仿真是20 世纪 60年代伴随计算机技术 的进步而发展起来的交通分析技术和方法,它可以动 复现交通流的时空变化,深入分析车辆、驾驶员和行 人、道路交通的特征,从而有效地进行交通规划、交 通组织与管理、交通能源节约与物资运输流量合理化 等方面的研究。由于国外在交通仿真研究方面开展的 较早,目前已经形成相对完整的体系,其中公认较成 熟的微观交通仿真软件主要包括:美国佛罗里达大学 McTrans中心开发的 TSIS-CORSIM、英国 Quadstone 公司的 PARAMICS 和德国 PTV AG公司的 VISSIM。 然而,这些微观交通仿真软件与主流的网络模拟 软件(如OPNET、 两者所支持的运动数据 外许多学术研究机构分别提出了各自的集成/协同仿 真模型,例如街区随机路点(STRAW)[126]运动模型已 经集成于JiST/SWANS[127]离散事件模拟器中,交通与 网络仿 [128] O) 与NS-2的集成,网络仿真中的车辆 (VeiNS) 则通过 TCP/IP 网络接口实现了 SUMO 与 OMNeT++的集成,针对车车通信的多模拟器互联环 境(MSIECV)[131]实现了 NS-2、VISSIM 与MATLAB/ Simulink 等模拟软件之间的无缝连接,集成网络和运 动模拟实验平台 GrooveNet(原名为GrooveSim)[132,133] 则允许在真实或模拟车辆之间实时通信。 8. 结束语 车辆自组织网络是一类迅速崛起并富有挑战的 移动自组织传感网络。除了前面讨论的无线接入、信 道共享 术也引起了 VANET 研究人员的广泛兴趣,例如 车辆网络中数据传输控制[62]、通信安全与认证[134,135]、 信息编码与调度[136,137]等。限于篇幅的考虑,本文仅 将这些可能的研究热点和研究方向罗列出来,只想起 到抛砖引玉的作用,不做深入的讨论。对这些问题感 兴趣的读者也可以参考所引用的相关文献,期望能够 借此推动国内学者对这一新兴领域更广泛的关注与 重视。 [1] I. Chlamtac, M. Conti and J.-N. Liu. Mobile ad hoc networking: Imperatives and challenges. Ad Hoc Networks, 2003, 1(1): 13- 64. maniam Copyright © 2013 Hanspub 40  车辆自组织网络 sensor networks: A survey. Computer 393-422. Networks, 2002, 38(4): , 黄海宁, 林闯. 无线传感器网络[J]. 软件学报, 2003, [4] A survey and tutorial on requirements, architectures, challenges, tions. IEEE Communications Surveys and [6] [11] . ad- COMeSafety cation archi- tecture—Overall framework, proof of concept implementation 7. 2010. H. Füßler M. Torrent-Moreno, M. Transier, et al. Thoughts on a ement collision warning. Journal of Intelligent Transportation Systems, [23] S. Panichpapiboon, W. Pattara-Atikom. A review of information munications Surveys & Tutorials, 2011, 99: 1-15. isitpongphan, O. K. Tonguz, J. S. Parikh, et al. Broadcast storm mitigation techniques in vehicular ad hoc networks. IEEE Wireless Communications, 2007, 14(6): 84-94. nd H. Krishnan. Cooperative rash avoidance with wireless technology. Proceedings of the 12th World Congress on ing using dedicated short range wireless communications. g, R. Goel, C. Farkas, et al. PTC-VANET interactions EE Vehicular Technology Conference (VTC- ms (ITSC- , 2006, 44(1): 74-82. : 6-19. Network Systems IEEE Workshop on Mobile Networking for [3] 任丰原 14(7): 1282-1291. X. J. Li, B.-C. Seet and P. H. J. Chong. Multihop cellular networks: Technology and economics. Computer Networks: The International Journal of Computer and Telecommunications Networking, 2008, 52(9): 1825-1837. [5] G. Karagiannis, O. Altintas, E. Ekici, et al. Vehicular networking: standards and solu Tutorials, 2011, 13(4): 584-616. J. Luo, J.-P. Hubaux. A survey of research in inter-vehicle communications. Embedded Security in Cars: Securing Current and Future Automotive IT Applications. Heidelberg: Springer Berlin, 2006: 111-122. [7] M. Torrent-Moreno, M. Killat and H. Hartenstein. The challenges of robust inter-vehicle communications. Proceedings of the 62nd IEEE Vehicular Technology Conference (VTC), Dallas, 2005, 1: 319-323. [8] J. J. Blum, A. Eskandarian and L. J. Hoffman. Challenges of intervehicle ad hoc networks. IEEE Transactions on Intelligent Transportation Systems, 2004, 5(4): 347-351. [9] S. Yousefi, M. S. Mousavi and M. Fathy. Vehicular ad hoc networks (VANETs): Challenges and perspectives. Proceedings of the 6th International Conference on ITS Telecommunications, 2006: 761-766. [10] Y. Toor, P. Muhlethaler, A. Laouiti, et al. Vehicle ad hoc networks: Applications and related technical issues. IEEE Communications Surveys & Tutorials, 2008, 10(3): 74-88. H. Füßler, M. Mauve, H. Hartenstein, et al. Position-based routing for car-to-car communication. Inter-vehicle-communi- cations based on ad hoc networking principles—The FleetNet project. Karlsruhe: Universitätsverlag Karlsruhe, 2005: 117-143. [12] M. Rudack, M. Meincke and M. Lott. On the dynamics of ad hoc networks for inter vehicle communication (IVC). Proceed- ings of the 2002 International Conference on Wireless Networks (ICWN’02), Las Vegas, 2002. [13] H. Füßler, M. Mauve, H. Hartenstein, et al. A comparison of routing strategies for vehicular ad hoc networks. Technical Report TR-02-003, 2002 [14] T.-H. Kim, W.-K. Hong and H.-C. Kim. An effective multi-hop broadcast in vehicularhoc network. Architecture of Comput- ing Systems—ARCS 2007. Heidelberg: Springer Berlin, 2007: 112-125. [15] M. L. Sichitiu, M. Kihl. Inter-vehicle communication systems: A survey. IEEE Communications Surveys & Tutorials, 2008, 10(2): 88-105. [16] Q. Xu, R. Sengupta and D. Jiang. Design and analysis of highway safety communication protocol in 5.9 GHz dedicated short range communication spectrum. Proceedings of the 57th IEEE Semiannual Vehicular Technology Conference (VTC), 2003, 4: 2451-2455. [17] M. Bechler, H. Berninger, T. Biehle, et al. architecture task force: European ITS communi [30 [36] FP6-02737 [18] , protocol architecture for vehicular ad-hoc networks. Proceedings of the 2nd International Workshop in Intelligent Transportation (WIT), Hamburg, 2005: 41-45. [19] H. Hartenstein, K. P. Laberteaux. A tutorial survey on vehicular ad hoc networks. IEEE Communications Magazine, 2008, 46(6): 164-171. [20] U. Lee, R. Cheung and M. Gerla. Emerging vehicular applica- tions. Vehicular Networks: From Theory to Practice. Chapman & Hall, CRC Press, Taylor & Francis Group, 2009: 1-30. [21] S. E. Shladover, S.-K. Tan. Analysis of vehicle positioning accuracy requirs for communication-based cooperative 2006, 10(3): 131-140. [22] H.-S. Tan, J. Huang. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 415-428. dissemination protocols for vehicular ad hoc networks. IEEE Com [24] N. W [25] J. A. Misener, R. Sengupta a collision warning: Enabling c Intelligent Transport Systems, San Francisco, 2005. [26] T. ElBatt, S. K. Goel, G. Holland, et al. Cooperative collision warn Proceedings of the 3rd International Workshop on Vehicular Ad Hoc Networks, Los Angeles, 2006: 1-9. [27] M. Harton to prevent highway rail intersection crossing accidents. Proceed- ings of the 65th IE 2007-Spring), Dublin, 2007: 2550-2554. [28] N. Ravi, S. Smaldone, L. Iftode, et al. Lane reservation for highways (Position Paper). Proceedings of the 10th International IEEE Conference on Intelligent Transportation Syste 2007), Seattle, 2007: 795-800. [29] S. Biswas, R. Tatchikou and F. Dion. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Communications Magazine ] V. Gradinescu, C. Gorgorin. Adaptive traffic lights using car-to- car communication. Proceedings of the 65th IEEE Vehicular Technology Conference (VTC-2007-Spring), Dublin, 2007: 21-25. [31] T. Nadeem, S. Dashtinezhad, C. Liao, et al. Traffic view: Traffic data dissemination using car-to-car communication. ACM SIGMOBILE Mobile Computing and Communications Review, 2004, 8(3) [32] A. Nandan, S. Das, G. Pau, et al. Co-operative downloading in vehicular ad-hoc wireless networks. Proceedings of the Second Annual Conference on Wireless on-demand and Services (WONS-2005), 2005: 32-41. [33] K. C. Lee, S.-H. Lee, R. Cheung, et al. First experience with CarTorrent in a real vehicular ad hoc network testbed. Pro- ceedings of the Vehicular Environments (MOVE-2007), Anchorage, 2007, 109- 114. M. Caliskan, D. Graupner and M. Mauve. Decentralized[34] dis- covery of free parking places. Proceedings of the 3rd inter- national workshop on Vehicular ad hoc networks, Los Angeles, 2006: 30-39. R. Panayappan, J. M. Trivedi, A. Studer, et al. VANET-based [35] approach for parking space availability. Proceedings of the fourth ACM international workshop on Vehicular ad hoc networks, Montreal, 2007. G. Yan, M. C. Weigle and S. Olar iu. A novel parking service using wireless networks. Proceedings of the IEEE/INFORMS International Conference on Service Operations, Logistics and Informatics (SOLI-2009), Chicago, 2009: 406-411. [37] M. A. Bonuccelli, G. Giunta, F. Lonetti, et al. Real-time video transmission in vehicular networks. Proceedings of the IEEE Workshop on Mobile Networking for Vehicular Environments (MOVE), 2007: 115-120. [38] C. E. Palazzi, M. Roccetti, S. Ferretti, et al. Online games on wheels: Fast game event delivery in vehicular ad-hoc networks. Proceedings of the 3rd International Workshop on Vehicle-to- Vehicle Communications 2007 (V2VCOM-2007), Istanbul, 2007. [39] B. Bochow, M. Bechler. Internet integration. Inter-vehicle-com- munications based on ad hoc networking principles—The Fleet Copyright © 2013 Hanspub 41  车辆自组织网络 Net project. Karlsruhe: Universitätsverlag Karlsruhe, 2005: 175- s: IGI Global, 2010: 200-213. ng vehicular ad hoc networks. d information exchange between roadside and vehicle , 2009: 1-20. mmunication platform for cars. Modelling, Computa- ads. The Secure ks. 211. [40] G. Yan, D. B. Rawat and S. El-Tawab. Reliable routing protocols in VANETs. Advances in Vehicular Ad-Hoc Networks: Develop- ments and Challenge [41] G. Yan, S. Olariu. A probabilistic analysis of link duration in vehicular ad hoc networks. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1227-1236. [42] M. Raya, J.-P. Hubaux. Securi Journal of Computer Security, 2007, 15(1): 39-68. [43] ASTM. E2213-2003. Standard specification for telecommuni- cations an systems—5 GHz band dedicated short range communications (DSRC) medium access control (MAC) and physical layer (PHY) specifications, 2003. [44] H. Moustafa, S. M. Senouci and M. Jerbi. Introduction to vehicular networks. Vehicular Networks: Techniques, Standards, and Applications. Northwest: Auerbach Publishers, CRC Press, Taylor & Francis Group [45] T. Kosch, R. Mietzner and K.-O. Proskawetz. COMeSafety: A EU specific support activity (Project Presentation). 2006 [46] T. Sukuvaara, P. Nurmi, D. Stepanova, et al. Wireless traffic service co tion and Optimization in Information Systems and Management Sciences, 2008: 548-557. [47] R. Pfliegl. COOPERS: Co-operative systems for intelligent road safety (Project Presentation). 2010 [48] M. Provera. SAFESPOT integrated project: Co-operative sys- tems for road safety—Smart vehicles on smart ro [72] Vehicle Communication Workshop, Lausanne, 2006. [49] CVIS. Cooperative Vehicle-Infrastructure Systems (CVIS). http://www.cvisproject.org [50] T. Leinmüller, L. Buttyan, J.-P. Hubaux, et al. SEVECOM— Secure vehicle communication. IST Mobile and Wireless Communication Summit, Mykonos, 2006. [51] K. Meinken, L. Andreone, A. Guarise, et al. WATCH-OVER: The concept of a cooperative system for vehicle to vulnerable road users communication. Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles, Lyon, 2007. [52] D. Reichardt, M. Miglietta, L. Moretti, et al. CarTALK 2000: Safe and comfortable driving based upon inter-vehicle-com- munication. Proceedings of the IEEE Intelligent Vehicle Sym- posium (IV-2002), Versailles, 2002, 2: 545-550. [53] P. Morsink, R. Hallouzi, I. Dagli, et al. CarTALK 2000: Development of a cooperative ADAS based on vehicle-to- vehicle communication. Proceedings of the 10th World Congress and Exhibition on Intelligent Transport Systems and Services, Madrid, 2003. [54] W. Franz, H. Hartenstein and M. Mauve. Inter-vehicle- communications based on ad hoc networking principles—The Fleet Net project. Karlsruhe: Universitätsverlag Karlsruhe, 2005. [55] A. Festag, G. Noecker, M. Strassberger, et al. NoW—Network on wheels: Project objectives, technology and achievements. Proceedings of the 5th International Workshop on Intelligent Transportation (WIT), Hamburg, 2008: 211-216. [56] X.-M. Dong, K. Li, J. Misener, et al. Expediting vehicle infrastructure integration (EVII). California PATH Research Report UCB-ITS-PRR-2006-20, Berkeley, 2006. [57] J. Opiola. Vehicle infrastructure integration (VII) in the US— enhancing safety, enabling mobility. The Instititon of Engineer- ing and Technology Seminar on RFID and Electronic Vehicle Identification in Road Transport, Newcastle, 2006: 79-90. [58] K. Hartman, J. Strasser. Saving lives through advanced vehicle safety technology: Intelligent vehicle initiative final report. Final Report FHWA-JPO-05-057, Cambridge, 2005. [59] VSCC. Vehicle safety communications project. Final Report DOT HS 810 591, 2006. [60] M. Schagrin, M. Oliver. Cooperative intersection collision avoidance initiative. Proceedings of ITS America Annual Meeting, 2005. [61] J. J. Ference. The integrated vehicle-based safety systems initiative. 13th World Congress on Intelligent Transport Systems and Services, London, 2006. [62] 陈立家, 江昊, 吴静等. 车用自组织网络传输控制研究[J]. 软件学报, 2007, 18(6): 1477-1490. [63] 常促宇, 向勇, 史美林. 车载自组网的现状与发展[J]. 通信 学报, 2007, 28(11): 116-126. [64] 李丽君, 刘鸿飞, 杨祖元等. 车用自组网信息广播[J]. 软件 学报, 2010, 21(7): 1620-1634. [65] DSRC. Dedicated Short Range Communications (DSRC), 2009. http://www.leearmstrong.com/DSRC/DSRCHomeset.htm [66] D. Jiang, L. Delgrossi. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. Marina Bay, SINGAPORE, 2008: 2036-2040. [67] R. Roebuck. DSRC white paper. Carrollton, 2005. [68] D. Jiang, V. Taliwal, A. Meier, et al. Design of 5.9 GHz DSRC-based vehicular safety communication. IEEE Wireless Communications, 2006, 13(5): 36-43. [69] A. C. V. Gummalla, J. O. Limb. Wireless medium access control protocols. IEEE Communications Surveys & Tutorials, 2000, 3(2): 2-15. [70] J. Zhu, S. Roy. MAC for dedicated short range communications in intelligent transport system. IEEE Communications Magazine, 2003, 41(12): 60-67. [71] S. Leng, H. Fu, Q. Wang, et al. Medium access control in vehicular ad hoc networks. Wireless Communications and Mobile Computing, 2011, 11(7): 796-812. S. Sibecas, C. A. Corral, S. Emami, et al. On the suitability of 802.11a/RA for high-mobility DSRC. Proceedings of IEEE 55th Vehicular Technology Conference (VTC-2002-Spring), Bir- mingham, 2002, 1: 229-234. [73] J. Yin, T. El Batt, G. Yeung, et al. Performance evaluation of safety applications over DSRC vehicular ad hoc networks. Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, 2004: 1-9. [74] B. Gallagher, H. Akatsuka and H. Suzuki. Wireless communi- cations for vehicle safety: Radio link performance and wireless connectivity methods. IEEE Vehicular Technology Magazine, 2006, 1(4): 4-24. [75] L. Bononi, M. Di Felice. A cross layered MAC and clustering scheme for efficient broadcast in VANETs. Proceedings of the IEEE International Conference on Mobile Adhoc and Sensor Systems (MASS-2007), Pisa, 2007: 1009-1016. [76] H. Menouar, F. Filali and M. Lenardi. A survey and qualitative analysis of MAC protocols for vehicular ad hoc networks. IEEE Wireless Communications, 2006: 30-35. [77] M. J. Booysen, S. Zeadally and G. J. van Rooyen. Survey of media access control protocols for vehicular ad hoc networ IET Communications, 2011, 5(11): 1619-1631. [78] F. Borgonovo, A. Capone, M. Cesana, et al. RR-ALOHA, a reliable R-ALOHA broadcast channel for ad-hoc inter-vehicle communication networks. Proceedings of the Mediterranean Ad hoc networking Conference (Med-Hoc-Net 2002), Baia Chia, 2002. [79] B. O’Hara, A. Petrick. The IEEE 802.11 handbook: A designer’s companion. New York: Standards Information Network IEEE Press, 2005. [80] K. Tokuda, M. Akiyama and H. Fujii. DOLPHIN for inter- vehicle communications system. Proceedings of the IEEE Intelligent Vehicles Symposium (IV-2000), Dearborn, 2000: 504-509. [81] F. Borgonovo, A. Capone, M. Cesana, et al. ADHOC MAC: New MAC architecture for ad hoc networks providing efficient and reliable point-to-point and broadcast services. Wireless Networks, 2004, 10(4): 359-366. [82] J. Liu, F. Y. Ren, L. M. Miao, et al. A-ADHOC: An Adaptive real-time distributed MAC protocol for vehicular Ad Hoc networks. Mobile Networks & Applications, 2011, 16(5): 576- 585. [83] L. Coletti, N. Riato, A. Capone, et al. Architectural and technical Copyright © 2013 Hanspub 42  车辆自组织网络 aspects for ad hoc networks based on UTRA TDD for inter- vehicle communication. Proceedings of the 12th IST Mobile & Wireless Communications Summit, Aveiro, 2003: 468-472. [84] Y.-B. Ko, V. Shankarkumar and N. H. Vaidya. Medium access OCOM-2000) nas in mobile ad ting, Lausanne, 2002: 183- assiulas. A MAC protocol for full ernational sym l and omni- Computer and Co mputing and Networking (MobiCom 2000), works. IEEE Communications Magazine, 2010, International Conference on Computer Communi- 22. F. Özgüner. Black-burst-based multi- 2): 32-42. a, 2004: 47-56. E. Chaput and A.-L. Beylot. Simulation of Vehicular 41. 场景中车用自组织网络的节点度[J]. B. D. O. Anderson. On the giant component of Bost control protocols using directional antennas in ad hoc networks. Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies (INF, 48 Tel Aviv, 2000, 1: 13-21. [85] A. Nasipuri, S. Ye, J. You, et al. A MAC protocol for mobile ad hoc networks using directional antennas. Proceedings of the IEEE Wireless Communications and Networking Conference cations (INFOCOM-2006), Barcelona, 2006: 1-11. [104] J. Zhao, G.-H. Cao. VADD: Vehicle-assisted data delivery in vehicular ad hoc networks. IEEE Transactions on Vehicular Technology, 2008, 57(3): 1910-19 (WCNC-2000), Chicago, 2000, 3: 1214-1219. [86] R. Ramanathan. On the performance of ad hoc networks with beamforming antennas. Proceedings of the 2nd ACM international symposium on Mobile ad hoc networking & computing, Long Beach, 2001: 95-105. [87] R. R. Choudhury, X. Yang, R. Ramanathan, et al. Using directional antennas for medium access control in ad hoc networks. Proceedings of the 8th annual international conference on Mobile computing and networking, Atlanta, 2002, 59-70. [88] M. Takai, J. Martin, R. Bagrodia, et al. Directional virtual carrier sensing for directional antenhoc networks. Proceedings of the 3rd ACM international symposium on Mobile ad hoc networking & compu 193. [89] T. Korakis, G. Jakllari and L. T exploitation of directional antennas in ad-hoc wireless networks. Proceedings of the 4th ACM intposium on Mobile hop ad hoc networking & computing, Annapolis, 2003: 98-107. [90] M. Sadashivaiah, R. Makanaboyina, B. George, et al. Perfor- mance evaluation of directional MAC protocol for inter-vehicle communication. IEEE VTC-Spring, 2005. [91] R. M. Yadumurthy, A. Chimalakonda, M. Sadashivaiah, et al. Reliable MAC broadcast protocol in directiona directional transmissions for vehicular ad hoc networks. Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks, Cologne, 2005: 10-19. [92] D. Lee, R. Attias, A. Puri, et al. A wireless token ring protocol for intelligent transportation systems. Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC’01), Oak- land, 2001: 1152-1157. [93] Z. D. Chen, H. T. Kung and D. Vlah. Ad hoc relay wireless networks over moving vehicles on highways. Proceedings of the 2nd ACM international symposium on Mobile ad hoc networking & computing, Long Beach, 2001: 247-250. [94] F. Li, Y. Wang. Routing in vehicular ad hoc networks: A survey. IEEE Vehicular Technology Magazine, 2007, 2(2): 12-22. [95] W. Chen, R. K. Guha, T. J. Kwon, et al. A survey and challenges in routing and data dissemination in vehicular ad hoc networks. Wireless Communications & Mobile Computing, 2011, 11(7): 787-795. [96] A. Casteigts, A. Nayak and I. Stojmenovic. Communication protocols for vehicular ad hoc networks. Wireless Communi- cations & Mobile Computing, 2011, 11(5): 567-582. [97] C. E. Perkins, P. Bhagwat. Highly dynamic destination-se- quenced distance-vector routing (DSDV) for mobile computers. ACM SIGCOMM Computer Communication Review, 1994, 24(4): 234-244. [98] P. Jacquet, P. Mühlethaler, C T. lausen, et al. Optimized link state routing protocol for ad hoc networks. Proceedings of the IEEE International Multi Topic Conference (INMIC’01), Lahore, 2001: 62-68. [99] V. D. Park, M. S. Corson. A highly adaptive distributed routing algorithm for mobile wireless networks. Proceedings of the 16th Annual Joint Conference of the IEEEm- [1 munications Societies (INFOCOM '97), Kobe, 1997, 3: 1405- 1413. [100] D. B. Johnson, D. A. Maltz. Dynamic source routing in ad hoc wireless networks. Mobile Computing: Kluwer Academic Pub- lishers, 1996: 153-181. [101] B. Karp, H. T. Kung. GPSR: Greedy perimeter stateless routing for wireless networks. The 6th Annual International Conference on Mobile Co on, 2000: 243-254. [102] K. C. Lee, U. Lee and M. Gerla. Geo-opportunistic routing for vehicular net (5): 164-170. [103] J. Burgess, B. Gallagher, D. Jensen, et al. MaxProp: Routing for vehicle-based disruption-tolerant networks. Proceedings of the 25th IEEE [105] V. Naumov, T. R. Gross. Connectivity-aware routing (CAR) in vehicular ad-hoc networks. Proceedings of the 26th IEEE International Conference on Computer Communications (INFOCOM-2007), 2007: 1919-1927. [106] R. A. Santos, R. M. Edwards and A. Edwards. Cluster-based location routing algorithm for vehicle to vehicle communication. Proceedings of the IEEE Radio and Wireless Conference, 2004: 39-42. [107] G. Korkmaz, E. Ekici, F. Özgüner, et al. Urban multi-hop broad- cast protocol for inter-vehicle communication systems. Proceed- ings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, 2004: 76-85. [108] G. Korkmaz, E. Ekici and broadcast protocols for vehicular networks. IEEE Trans- actions on Vehicular Technology, 2007, 56(5): 3159-3167. [109] C. MaihÖfer. A survey of geocast routing protocols. IEEE Communications Surveys & Tutorials, 2004, 6( [110] H. Wu, R. Fujimoto, R. Guensler, et al. MDDV: A mobility- centric data dissemination algorithm for vehicular networks. Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphi [111] D. Sormani, G. Turconi, P. Costa, et al. Towards lightweight information dissemination in inter-vehicular networks. Pro- ceedings of the 3rd international workshop on Vehicular ad hoc networks, Los Angeles, 2006: 20-29. [112] C. Maihöfer, T. Leinmüller and E. Schoch abiding geocast: Time-stable geocast for ad hoc networks. Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks, Cologne, 2005, 20-29. [113] R. Stanica, Ad-Hoc Networks: Challenges, Review of Tools and Recom- mendations. Computer Networks, 2011, 55(14): 3179-3188. [114] D. Helbing. Traffic and related self-driven many-particle sys- tems. Reviews of Modern Physics, 2001, 73(4): 1067-1141. [115] J. Haerri, F. Filali and C. Bonnet. Mobility models for vehicular ad hoc networks: A survey and taxonomy. IEEE Communi- cations Surveys and Tutorials, 2009, 11(4): 19- [116] M. Fiore. Mobility models in inter-vehicle communications literature. Technical Report, Department of Electronics, Poly- technic Institute of Torino, 2006. [117] Y. Zang, L. Stibor, G. Orfanos, et al. An error model for inter- vehicle communications in highway scenarios at 5.9 GHz. Proceedings of the 2nd ACM International Workshop on Perfor- mance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks, Montreal, 2005: 49-56. [118] 熊炜, 李清泉. 高速公路 电子与信息学报, 2010, 32(9): 2033-2038. [119] 熊炜, 李清泉. 高速公路场景中车用自组织网络1——连 通 的 必要条件[J]. 软件学报, 2010, 21(11): 2906-2919. ] C. Bettstetter, C. Hartmann. Connectivity of wireless m20 ultihop networks in a shadow fading environment. Wireless Networks, 2005, 11(5): 571-579. [121] Z L. L. hang, B. H. Soong, Y. Zhang, et al. An analysis of k-connectivity in shadowing and Nakagami fading wireless multi-hop networks. Marina Bay, 2008: 395-399. [122] X. Ta, G. Mao, Copyright © 2013 Hanspub 43  车辆自组织网络 Copyright © 2013 Hanspub 44 termination eno, F. Schmidt-Eisenlohr, H. Füßler, et al. 006, 1: 385-391. 5: 69-78. 2005: 297-311. Stancil, et al. GrooveSim: A ACM International wireless multi-hop networks in the presence of shadowing. IEEE Transactions on Vehicular Technology, 2009. [123] V. Taliwal, D. Jiang, H. Mangold, et al. Empirical de of channel characteristics for DSRC vehicle-to-vehicle commu- nication. Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, 2004. [124] M. Torrent-Mor Effects of a realistic channel model on packet forwarding in vehicular ad hoc networks. Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Las Vegas, 2 [125] F. J. Martinez, C. K. Toh, J.-C. Cano, et al. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wireless Communications & Mobile Computing, 2011, 11(7): 813-828. [126] D. R. Choffnes, F. E. Bustamante. An integrated mobility and traffic model for vehicular wireless networks. Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks, Cologne, 200 [127] R. Barr, Z. J. Haas and R. Renesse. Scalable wireless ad hoc network simulation. In Handbook on Theoretical and Algorithmic Aspects of Sensor, Ad Hoc Wireless, and Peer-to- Peer Networks, CRC Press, [128] M. Piorkowski, M. Raya, A. Lugo, et al. TraNS: Realistic joint traffic and network simulator for VANETs. ACM SIGMOBILE Mobile Computing and Communications Review, 2008, 12(1): 31-33. [129] SUMO. SUMO—Simulation of Urban MObility—An open source traffic simulation package, 2009. http://sumo.sourceforge.net/ [130] C. Sommer, Z. Yao, R. German, et al. Simulating the influence of IVC on road traffic using bidirectionally coupled simulators. Proceedings of IEEE INFOCOM Workshop on MObile Net- working for Vehicular Environments (MOVE), Phoenix, 2008: 1-6. [131] C. Lochert, A. Barthels, A. Cervantes, et al. Multiple simulator interlinking environment for IVC. Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks, Cologne, 2005: 87-88. [132] R. Mangharam, D. S. Weller, D. D. topography-accurate simulator for geographic routing in vehicular networks. Proceedings of the 2nd Workshop on Vehicular Ad Hoc Networks (VANET’05), Cologne, 2005: 59-68. [133] R. Mangharam, D. Weller, R. Rajkumar, et al. GrooveNet: A hybrid simulator for vehicle-to-vehicle networks. Mobile and Ubiquitous Systems: 2006 Third Annual International Con- ference on Networking & Services, 2006: 1-8. [134] M. Riley, K. Akkaya and K. Fong. A survey of authentication schemes for vehicular ad hoc networks. Security and Com- munication Networks, 2011, 4(10): 1137-1152. [135] M. A. Moharrum, A. A. Al-Daraiseh. Toward secure vehicular ad-hoc networks: A survey. IETE Technical Review, 2012, 29(1): 80-89. [136] C. L. Robinson, L. Caminiti, D. Caveney, et al. Efficient co- ordination and transmission of data for cooperative vehicular safety applications. Proceedings of the 3rd International Workshop on Vehicular Ad Hoc Networks, Los Angeles, 2006: 10-19. [137] C. L. Robinson, D. Caveney, L. Caminiti, et al. Efficient mes- sage composition and coding for cooperative vehicular safety applications. IEEE Transactions on Vehicular Technology, 2007, 56(6): 3244-3255. |