Modeling and Simulation
Vol.06 No.02(2017), Article ID:20488,5
pages
10.12677/MOS.2017.62008
Design of Fault Diagnosis Method for Centrifugal Compressor Actuator
Yabin Huang, Xiaogang Zhang
Xinjiang West Pearl Engineering Construction Co. Ltd., Karamay Xinjiang

Received: Apr. 23rd, 2017; accepted: May 8th, 2017; published: May 11th, 2017

ABSTRACT
A novel compressor actuator fault diagnosis method is proposed for the centrifugal compressor system satisfying Lipschitz condition. By collecting the real-time status of the compressor actuator faulty and normal conditions, adaptive diagnostic observer is design, and then the compressor actuator fault is tracked accurately, which realizes the fault detection. The stability of design system is analyzed by using Lyapounov function. The results show that the adaptive fault diagnosis observer can accurately track the centrifugal compressor actuator fault, which proves the effectiveness of the proposed method.
Keywords:Centrifugal Compressor, Fault Diagnosis, Adaptive Fault Diagnosis Observer, Fault Tracking
离心式压缩机执行器故障诊断方法设计
皇雅斌,张晓刚
新疆西部明珠工程建设有限公司,新疆 克拉玛依
收稿日期:2017年4月23日;录用日期:2017年5月8日;发布日期:2017年5月11日

摘 要
针对一类满足利普希茨条件的离心式压缩机系统,提出了一种新型压缩机执行器故障诊断方法。设计自适应诊断观测器,实时动态采集压缩机执行器故障前后的信息,对压缩机执行器故障进行精确跟踪,达到故障诊断的目的。利用Lyapounov函数分析了设计系统的稳定性。仿真结果表明,自适应诊断观测器能够实时精准的跟踪离心式压缩机执行器故障,证明了该方法的有效性。
关键词 :离心式压缩机,故障诊断,自适应诊断观测器,故障跟踪

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着现代科技的快速发展,各种压缩机在运作过程中的可靠性和稳定性不断提高,故障诊断技术变得越来越重要。在过去的几十年中,基于模型的故障诊断技术在国内外已经得到广泛关注 [1] [2] [3] [4] ,形成了多种故障诊断方法 [5] [6] [7] [8] ,例如神经网络法、模糊推理法、观测器法和故障参数估计法等。但大部分设计主要集中于线性系统建模的故障诊断,在非线性系统中的故障诊断的相关研究相对偏少。经过很多年的发展,根据不同的原理已经形成了各种各样的故障类型描述,如按其发生部位的不同,故障可以分为:被控过程元部件故障,传感器故障,执行器故障。按照故障所发生形式的不同,故障可以分为:加性故障,乘性故障。在现代计算机控制系统中,软硬件的可靠性和稳定性已经很高,在控制系统中,传感器和执行器的失效逐渐变成了主要的问题 [9] [10] 。据统计,传感器和执行器的故障问题占总故障的85%左右。在这种严峻的形势下,控制研究系统的故障诊断方法变得很重要。由于自适应诊断观测器可以精确的诊断故障,在故障诊断中得到了广泛应用。本文针对非线性系统压缩机执行器故障设计自适应诊断观测器,通过设计执行器增益,可以精确的跟踪故障,并且利用Lyapounov函数,验证了整个设计系统的稳定性,从而实现了压缩机执行器的故障诊断,并维持了系统的鲁棒性。最后,仿真结果说明了该方法的有效性。
2. 模型描述与执行器故障诊断
2.1. 模型描述
考虑如下所示的非线性系统数学模型:
 (1)
(1)
式中,其中 ,
, ,
, 为有适当维数的已知矩阵,
为有适当维数的已知矩阵, ,
, ,
, 分别为状态向量,输入向量和输出向量。
分别为状态向量,输入向量和输出向量。 是执行器增益,
是执行器增益, 的未知变化表示执行器发生故障。当系统正常时,
的未知变化表示执行器发生故障。当系统正常时, ,这里
,这里 是无故障系统的执行器增益。
是无故障系统的执行器增益。 代表系统的非线性部分,满足如下Lipschitz条件:
代表系统的非线性部分,满足如下Lipschitz条件:
 (2)
(2)
其中 是已知Lipschitz常数。
是已知Lipschitz常数。
2.2. 自适应诊断观测器设计
为了诊断连续非线性系统中执行器故障,设计如下自适应诊断观测器 [11] [12] [13] [14]
 (3)
(3)
这里 是观测器状态向量,
是观测器状态向量, 是
是 的估计值,
的估计值, 的初始条件为
的初始条件为 ,假设故障发生后
,假设故障发生后 常数向量
常数向量 ,
, 是观测器增益。
是观测器增益。
定义观测器状态误差

系统残差
 (4)
(4)
则动态误差为
 (5)
(5)
其中
 (6)
(6)
本文故障诊断的目标是发现合适的诊断算法 ,并且找到满足观测器增益
,并且找到满足观测器增益 的合适条件,使得
的合适条件,使得
2.3. 执行器故障诊断算法
定理1 假设存在正定矩阵 ,使自适应观测器(3)中的增益矩阵
,使自适应观测器(3)中的增益矩阵 满足如下线性矩阵不等式 [15] :
满足如下线性矩阵不等式 [15] :
 (7)
(7)
 (8)
(8)
当执行器故障发生时,设计自适应诊断变化率
 (9)
(9)
使用公式(8)可以诊断执行器故障 ,这里
,这里 是预先确定的增益矩阵,代表学习率。
是预先确定的增益矩阵,代表学习率。
证明:定义如下Lyapounov函数

由(3) (4) (5)可推倒得

由(2) (7) (8),可得
从公式(8)中可以得 ,此公式的证明,表明观测器动态误差是保持稳定的,从而有
,此公式的证明,表明观测器动态误差是保持稳定的,从而有 。
。
3. 仿真实例
考虑下列某种离心式压缩机执行器故障系统:

已知条件有: ,
, ,
, 。其中系统的输入
。其中系统的输入 ,发生故障的时间
,发生故障的时间 ,
, 。系统故障描述:
。系统故障描述:
采用文中所研究方法对系统进行故障模型的相互转化得到新的状态方程,通过Matlab仿真可以得到执行器故障的仿真结果如图1所示。
由以上仿真结果可以得出本文所设计故障诊断方法对于离心式压缩机执行器发生故障时,能精确的跟踪故障,从而实现故障诊断的作用。
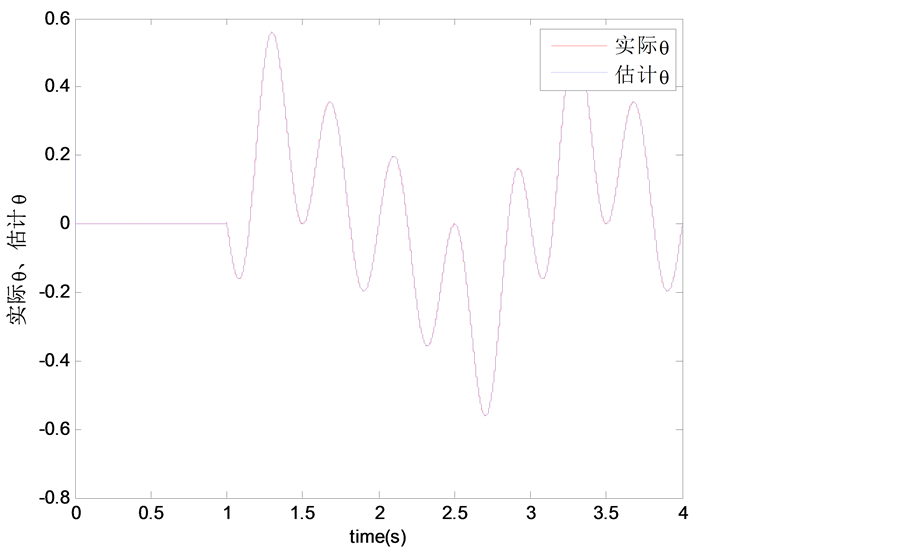
Figure 1. The system state fault diagram
图1. 系统状态故障图
4. 结论
本文提出了一种离心式压缩机执行器故障诊断方法,通过设计自适应诊断观测器,实时动态采集执行器故障前后的信息,对离心式压缩机执行器故障进行精确跟踪,达到故障诊断的目的。并利用线性矩阵不等式条件,通过Lyapounov函数分析了设计系统的稳定性。对离心式压缩机执行器出现故障后,进行相关的容错控制设计是接下来研究的工作。
文章引用
皇雅斌,张晓刚. 离心式压缩机执行器故障诊断方法设计
Design of Fault Diagnosis Method for Centrifugal Compressor Actuator[J]. 建模与仿真, 2017, 06(02): 65-69. http://dx.doi.org/10.12677/MOS.2017.62008
参考文献 (References)
- 1. 周东华, 叶银忠. 现代故障诊断与容错控制[M]. 北京: 清华大学出版社, 2000: 6.
- 2. 周东华, 孙优贤. 控制系统的故障检测与诊断技术[M]. 北京: 清华大学出版社, 1994.
- 3. 陈玉东, 施颂椒, 翁正新. 动态系统的故障诊断方法综述[J]. 化工自动化及仪表, 2001, 28(3): 1-14.
- 4. 闻新, 张洪钺, 周露. 控制系统的故障诊断和容错控制[M]. 北京: 机械工业出版社, 1998: 2.
- 5. 闻新, 胡恒章, 周露. 控制系统传感器故障诊断的一种新方法[J]. 化工自动化及仪表, 1995, 22(2): 24-28.
- 6. 张洪钺, 闻新, 周露. 国内控制系统故障诊断技术的现状与展望[J]. 火力与指挥控制, 1997(3).
- 7. 朱瑞军, 柴天佑. 基于动态神经网络的非线性系统鲁棒观测器设计[J]. 信息与控制, 1998, 12, 27(6): 421-425.
- 8. 戴琼海, 柴天佑, 等. 一类未知多变量非线性系统的动态神经网络自适应控制[J]. 信息与控制, 1996, 25(6): 332- 338.
- 9. 宋华, 张洪钺, 王行仁. 基于模糊观测器的不确定非线性系统的故障检测方法[J]. 航天控制, 2005, 23(3): 74-78
- 10. 周东华, 叶昊, 王桂增, 等. 基于观测器方法的故障诊断技术若干重要问题的探讨[J]. 自动化学报, 1998, 24(3): 338-344.
- 11. Zemouche, A. and Boutayeb, M. (2006) Observer Design for Lipschitz Nonlinear Systems: The Discete-Time Case. IEEE Transactions on Circuits and Systems-II: Express Briefs, 53, 777-781.
- 12. Trinh, H., Fernando, T. and Nahavandi, S. (2006) Partial-State Observers for Nonlinear Systems. Automatic Control, 51, 1808-1812. https://doi.org/10.1109/TAC.2006.884997
- 13. Ha, Q.P. (2004) State and Input Simultaneous Estimation for a Class of Nonlinear Systems. Automatica, 40, 1779- 1785.
- 14. Jiang, J. (2002) Robust Model-Based Fault Diagnosis for Dynamic Systems. Automatica, 38, 1089-1091.
- 15. Ga, Z.W. and Ding, S.X. (2007) Actuator Fault Robust Estimation and Fault Tolerant Control for a Class of Nonlinear Descriptor Systems. Automatica, 43, 912-920.