Journal of Antennas
Vol.06 No.02(2017), Article ID:20873,10
pages
10.12677/JA.2017.62004
Configuration Synthesis of Spatial Rectangular Pyramid Deployable Antenna with Common Constraint of First-Order Screw System
Yan Wang1, Hui Yang2, Rongqiang Liu3
1China Electronics Technology Group Corporation No.38 Research, Hefei Anhui
2College of Electrical Engineering and Automation, Anhui University, Hefei Anhui
3State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin Heilongjiang

Received: May 15th, 2017; accepted: Jun. 1st, 2017; published: Jun. 6th, 2017

ABSTRACT
Structural synthesis of the overconstrained deployable unit needs to be allocated relative position and orientation of each kinematic axes, and three-step method of topological structural analysis and design for the deployable unit cannot synthesize the overconstrained deployable units. Based on the topology structural description of the deployable units and screw theory, structural synthesis method of the overconstrained deployable unit is investigated. Based on this method, the rectangular pyramid deployable units which can be folded to plane are synthesized systemically and get a series of rectangular pyramid overconstrained deployable units. Feasibility of folding and deploying motion under a certain degree of freedom for these deployable units is verified by dynamical simulation using ADAMS.
Keywords:Array Antenna, Deployable Rectangular Pyramid Unit, Configuration Synthesis, Screw Theory, First-Order Screw System
公共约束一系可展开天线四棱锥结构构形综合
王岩1,杨慧2,刘荣强3
1中国电子科技集团38所,安徽 合肥
2安徽大学电气学院,安徽 合肥
3哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨
收稿日期:2017年5月15日;录用日期:2017年6月1日;发布日期:2017年6月6日

摘 要
过约束可展开单元的构型综合需要配置各个运动轴线间的相对位姿,采用可展开单元拓扑结构分析和设计的三步法,并不足以综合出含过约束的可展开单元。在可展开单元拓扑结构描述的基础上,基于螺旋理论开展对过约束可展开单元构型综合方法的研究,分析了可展开四棱锥单元可能的过约束情况,并给出其旋量表示。基于该方法,对可收拢到平面状态的四棱锥可展机构公共约束为螺旋一系的情况进行了系统的综合,进而提出一系列的四棱锥过约束可展开单元。通过ADAMS动力学仿真验证了这些可展开单元按照指定自由度进行折展运动的可行性。
关键词 :阵面天线,可展开四棱锥单元,构型综合,旋量理论,螺旋一系

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
阵面SAR天线由于它的高精度和高刚度的要求,以及它在发射时和工作时分别处于收拢和展开状态的特征,绝大多数的星载SAR阵面都采用了可展开机构进行支撑,如美国海洋观测卫星SEASAT、欧洲遥感民用雷达成像卫星ERS-1/2等。构型综合作为机构创新设计的一种最有效的方法,适用于平面机构和空间机构创新设计。目前,对空间机构的构型综合理论成果,主要集中在并联机构的研究上。近十年来形成综合方法主要可以分为3个派别 [1] :1) 基于位移子群,1978年Hervé列出了全部12类位移子群,奠定了基于位移子群机构综合的基础 [2] ,并只适用于具有位移子群结构的机构综合。2) 基于约束螺旋,该综合方法是由我国学者黄真 [3] 发展起来的,适用于一般过约束和无过约束的机构综合。3) 运动综合法,杨廷力教授提出了基于方位特征集的综合法 [4] [5] 。用该方法得到的机构为非瞬时机构,综合过程物理意义明确,且适用范围广。基于螺旋理论,以过约束功率和加过约束功率同时等于零为依据推导出可展开机构在过约束下允许连续折展运动的条件。进而提出过约束可展开机构构型综合流程。借助于该综合方法对四棱锥可展开机构在公共约束为旋量一系的情况下进行综合,得到一系列过约束四棱锥可展开机构。
2. 过约束可展开单元的螺旋表示
2.1. 运动的螺旋表示
螺旋理论采用6个标量同时表达矢量的方向和位置,就易于描述机构运动副的几何间关系,广泛应用于空间机构构型综合、运动分析和动力分析。设运动副简化点A相对坐标原点O的矢径为rOA,约束点相对坐标原点O的矢径为rOP。转动副运动螺旋旋距等于0。它对连接构件施加3个约束力和2个约束力矩。若转动副轴线由A点指向P点,则过A点转动副允许的相对运动的运动螺旋为,
 (1)
(1)
式中:$R为转动副运动螺旋,sAP为转动轴线方向向量,由A点指向P点,rOA为运动副简化点A相对坐标原点O的矢径。
万向副两运动轴线相互垂直。它对连接构件施加3个约束力和1个约束力矩。若万向副一个轴线由A指向P,另一个轴线⊥AP,则过A点万向副允许运动的运动螺旋为,
 (2)
(2)
式中: 和
和 分别为万向副两个旋转轴线运动螺旋,
分别为万向副两个旋转轴线运动螺旋, 为转动轴线方向向量,垂直于AP。
为转动轴线方向向量,垂直于AP。
球副对连接构件施加3个约束力。它可以简化为空间汇交于约束点P的三个转动副,通过球副连接的两相邻构件间运动的运动螺旋可以表示为,
 (3)
(3)
式中: 、
、 和
和 分别为球副三个旋转轴运动螺旋,
分别为球副三个旋转轴运动螺旋, 、
、 和
和 分别为球副三个旋转轴方向向量分别平行于x、y和z轴。
分别为球副三个旋转轴方向向量分别平行于x、y和z轴。
2.2. 过约束分析
空间机构过约束数目通常可以分成两个部分分别计算:公共约束和冗余约束。若一个过约束旋量与机构运动螺旋系中每一个旋量均互易,则该过约束为机构公共约束。除去公共约束后,若机构剩下的约束螺旋数仍大于所组成的旋量系阶数,则机构存在冗余约束。
当考虑过约束时,基于环路理论的可展开单元自由度计算公式变为,
 (4)
(4)
式中:F为自由度数,S为球副数,U为万向副数,R为转动副数,d为机构公共约束数目,u为除去公共约束后冗余约束数目。
由式(4)可知,当公共约束为4时,可实现连续折展运动的可展开单元运动副配置不存在。因此,将含过约束四棱锥可展开单元的构型综合分为以下3种类型进行讨论图表1所示:类型1,仅含有1个公共约束情况(F和C型机构);类型2,含有2个公共约束情况(FF、CC和FC型机构);类型3,含有3个公共约束情况(FFF、CCC、FFC和FCC型机构)。(注:F和C分别表示过约束为力线矢和力偶,N5-7-S1U1R6表示5、6和7号机构中分别含有1个S、1个U和1个R。)
2.3. 过约束允许连续折展的条件
虚功原理表明,对于被约束刚体能否实现给定运动通常通过考察约束力与给定速度的乘积(即瞬时约束功率)是否为零,若约束功率为零,则该运动为约束允许的运动 [6] 。该原理可同样应用于含过约束可展开单元:在含过约束可展开单元中,若该过约束力螺旋对所有运动副运动螺旋构成的折展运动螺旋系所做的过约束功率为零,则该过约束被称为可展开单元公共约束,该运动被称为该公共约束所允许的折展运动。
判断一个运动是否为瞬时机构仍然需要考察过约束加功率 [7] 。过约束下可展开单元能够连续折展的充要条件是过约束功率和加过约束功率同时等于零 [8] 。分为以下2种情况讨论:

Table 1. Possibility of 1-dof deployable structure with only common overconstrained
表1. 只含公共约束单自由度可展开单元运动副配置可能
1) 当过约束螺旋为力线矢时,
若约束力方向不变( ),转动副方向不变(
),转动副方向不变( ),则在过约束为力情况下,机构转轴存在需满足充要条件,
),则在过约束为力情况下,机构转轴存在需满足充要条件,
 (5)
(5)
因此,当可展开单元中含已知公共约束力时,转动副应该满足以下配置:(a) 当s//sr,满足上述条件。(b) 当s与sr相交,则rPA、s和sr共面,因此有 。若满足式(5)仍需要
。若满足式(5)仍需要 ,意味着要求rPA和s共线,即s过约束点P。(c) 当rPA、s和sr异面,
,意味着要求rPA和s共线,即s过约束点P。(c) 当rPA、s和sr异面, ,不满足条件。
,不满足条件。
2) 当过约束螺旋为力偶时,
若约束力方向不变( ),转动副方向不变(
),转动副方向不变( ),则在过约束为力偶情况下,机构转轴存在需满足充要条件,
),则在过约束为力偶情况下,机构转轴存在需满足充要条件,
 (6)
(6)
因此,当可展开单元中含已知公共约束力偶时,所有转动副应该满足配置条件:s⊥sr。
此外,上述得到转动副轴线配置原理都基于一个转动副方向不变( )这一假设。要保证转动副方向不变,连续平行或者汇交的转动副至少2个。过约束可展开单元具备连续折展运动除了需要满足式(5)和(6)条件外,还需遵循表2列举的基本原则。
)这一假设。要保证转动副方向不变,连续平行或者汇交的转动副至少2个。过约束可展开单元具备连续折展运动除了需要满足式(5)和(6)条件外,还需遵循表2列举的基本原则。
3. 公共约束为旋量一系时可展开单元综合
当可展开单元中含有1个公共过约束时,每个机构回路运动旋量最大无关数为5。表3总结了约束螺旋一系的运动特征。
3.1. 单一力线矢F
当可展开单元中含有1个公共过约束力$r时,
1) 球副$S应该满足条件:
 (7)
(7)
2) 万向副$U应该满足条件:
 (8)
(8)
3) 转动副$R应该满足:
Table 2. Basic principles of overconstrained deployable structure
表2. 过约束可展开单元应满足的基本原则
Table 3. Two kinds constrained screw systems
表3. 二种约束旋量系
 (9)
(9)
进而建立含有公共过约束力四棱锥可展开单元综合流程E如图1所示。
下面举例说明如何综合仅含有一个公共力线矢约束的四棱锥可展开单元。该机构可按照以下步骤进行综合,
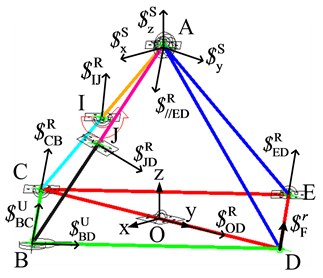
1) 选择综合对象及其拓扑图如图2所示。图2a为第5号四棱锥可展开单元,其中同一种颜色(灰度)代表一种构件。从图2b中可以看出该可展开单元由2个回路构成,其中回路1为∆CDE-AC-∆ADE,回路2为∆CDE-∆CBD-AB-∆ADE。
2) 从表1中选择运动副组合为单自由度F型N5-S1U1R6。
3) 本例中有两处框框连接,分别设定∆CDE-∆ADE连接转动副RDE位于E点方向为DE,设定∆CDE-∆CBD连接转动副RCD位于O点方向为OD。不妨设回路1含有3个R副1个S副,回路2含有4个R副1个U副。
4) 步骤3中已定转动副RDE和RCD交于D点,根据式(9)转动副存在条件可以推出P点位置和F方向的存在3种组合:(a) ;(b)
;(b) ;(c)
;(c) 。本例选择P点位置和F方向满足第3种组合。
。本例选择P点位置和F方向满足第3种组合。
5) 回路1中:根据式(4)球副S可以看作三个空间正交于约束点D的转动副。又步骤1中已定转动副RED与球副S交于约束点D。根据表2空间汇交于一点转动副最大无关数为3。若回路1中3R1S共6个运动旋量最大线性无关数为5,其余分布的R副不能再交于约束点D。根据式(9)其余转动副R应平行于公共约束力线矢F。
回路2中:对于万向副U根据式(2)可以看作两个正交的转动副。根据式(8)知U副两个相互垂直的转动副中,一个应该平行于F,另一个应该过D点。选择∆CBD-AB连接处B点安置U副。余下∆ADE-AB连接A点和折叠杆AB的J点处2个转动副未分配。根据空间汇交于一点转动副最大无关数为3,欲得回路2运动螺旋系最大无关数为5,余下2个R副不能同时交于约束点D,因此选J点处R副交于D点,A点处R副平行于约束力线矢F。综合结果如图2所示。
6) 设各点坐标为A (0 0 L)、B (L 0 0)、C (0 −L 0)、D (0 L 0)、E (−L 0 0)、I (0 −L/2 L/2)和J (L/2 0 L/2)。则根据式(1)~(3)得到各回路运动螺旋系如表4所示。
不难发现,回路1与回路2有相同的运动螺旋基(图3)。根据旋量系互易的原理可知回路1与回路2
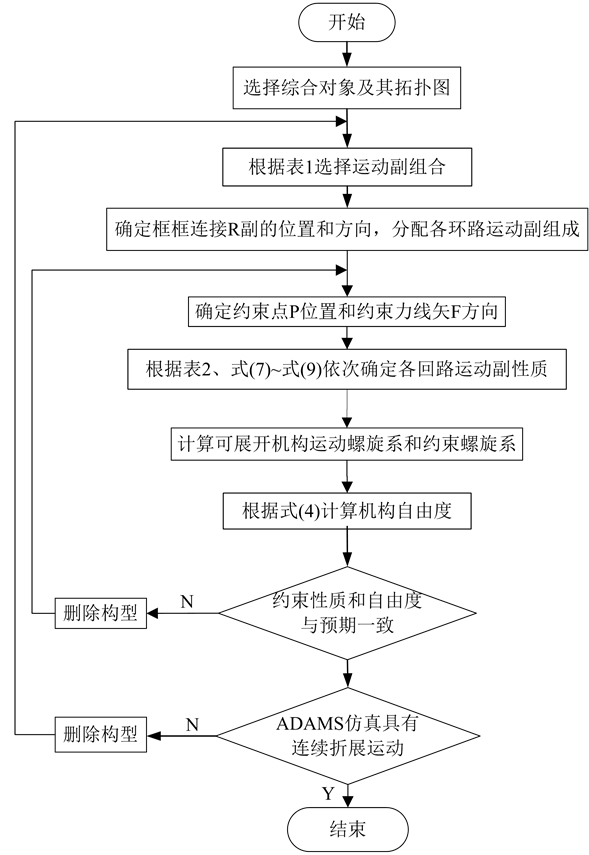
Figure 1. Procedure E: synthesis of rectangular pyramid deployable with common overconstraint
图1. 流程E:含有公共过约束四棱锥可展开单元综合流程

 (a) (b)
(a) (b)
Figure 2. Type F 1-DOF N5-S1U1R6; (a) Configuration; (b) Topological graph
图2. F型单自由度N5-S1U1R6;(a) 构型;(b) 拓扑图
有同一个公共过约束力线矢 ,该力线矢过D点平行于DE,与预期结果一致。
,该力线矢过D点平行于DE,与预期结果一致。
7) 根据式(4),该机构的自由度为1,与预期结果一致。
8) 建立N5-S1U1R6可展开单元ADAMS仿真过程如图4所示。仿真结果表明该机构在含有1个公共过约束F情况下可以实现连续折展运动。
9) 接受并保存构型。
3.2. 单一力偶C
当可展开单元中含有1个公共过约束力偶$r时,
1) 球副不能存在;
2) 万向副$U应该满足条件:
 (10)
(10)
3) 转动副$R应该满足条件:
 (11)
(11)
仅含一个公共过约束力偶C可展开单元综合过程与仅含一个公共过约束力线矢F相似,这里不再赘
Table 4. Screw systems of deployable structure shown in Figure 2
Figure 3. Motion screw system of deployable structure shown in Figure 2

Figure 4. Simulation using ADAMS
图4. ADAMS仿真过程
述。举例如下,
1) 选择综合对象为第11号构型,如图5所示。设回路1为∆ADE-CE-BC-∆ABD,回路2为∆ADE-AC-CE,回路3为∆ADE-CD-CE。
2) 从表1中选择运动副组合为单自由度C型N11-U6R4。
3) 本例中有一处框框连接,设定∆ADE-∆ABD连接转动副RAD位于D点方向为AD。不妨设回路1含有2个R副2个U副,回路2含有2个R副2个U副,回路3含有2个R副2个U副。
4) 根据式(11) C型可展开单元转动副存在条件可以推出公共过约束力偶C存在2种组合:(a) ;(b)
;(b) 。本例选择第一种方案。
。本例选择第一种方案。
5) 回路1中:根据式(10),确定U副两个转轴方向分别为平行x轴和AD。根据表2线性相关条件来配置运动旋量系最大无关数为5,进而确定最后一个R副位于E点,指向AD。
同理,可确定回路2和3各运动副配置。配置结果如图5所示。
6) 设各点坐标为A (0 0 L)、B (L 0 0)、C (0 −L 0)、D (0 L 0)、E (−L 0 0)、I (0 −L/2 L/2) 和J (0 0 0)。则根据式(1)、(2)和(3)得到各回路运动螺旋系如表5所示。
不难发现,回路1、回路2和回路3的运动螺旋系的最大无关数都为5,且有相同的运动螺旋基(图6)。根据旋量系互易的原理可知回路1与回路2有同一个公共过约束力偶 ,该力偶平行于AC,与预期结果一致。
,该力偶平行于AC,与预期结果一致。
7) 根据式(4),该机构的自由度为1,与预期结果一致。

 (a) (b)
(a) (b)
Figure 5. Type C 1-DOF N11-U6R4; (a) Configuration; (b) Topological graph
图5. C型单自由度N11-U6R4;(a) 构型;(b) 拓扑图
Table 5. Screw systems of deployable structure shown in Figure 5
Figure 6. Motion screw system of deployable structure shown in Figure 5
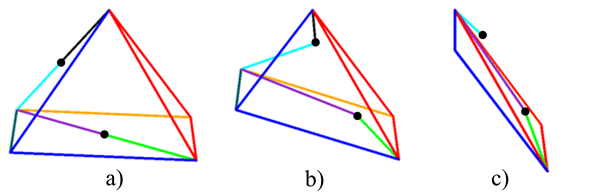
Figure 7. Simulation using ADAMS
图7. ADAMS仿真过程
Table 6. Synthesis results of rectangular pyramid deployable structure
表6. 单自由度四棱锥可展开单元综合结果
8) 建立公共过约束为单一C型N11-U6R4可展开单元ADAMS仿真过程如图7所示。仿真结果表明该机构在含有1个公共过约束C情况下可以实现连续折展运动。
9) 接受并保存构型。
3.2. 综合结果
表6列举了公共约束为螺旋一系的单自由度可展开四棱锥单元的9种综合结果。为了验证这些过约束可展开单元具有连续的折展运动,对这些构型依次建立了ADAMS仿真模型。表6列举的可展开单元及其ADAMS仿真结果表明采用提出的综合方法确实能有效的发现和发明一些仅靠经验设计不出来的仅含公共约束可展开单元。
4. 结论
基于螺旋理论,对四棱锥过约束可展开单元进行了系统的综合。基于虚功原理,推导出过约束可展开单元能够实现连续折展运动的充要条件。讨论了公共过约束为螺旋一系时,可展开单元运动副配置原则。基于该原则,对公共过约束为螺旋一系的四棱锥可展开单元进行系统的综合,得到了9种构型结果,对新型可展开单元进行了运动学仿真,结果表明所综合出来的过约束可展开单元能够按照预定的自由度实现连续折展运动。
基金项目
国家自然科学基金(51605001);高等学校学科创新引智计划资助项目(B07018)。
文章引用
王岩,杨慧,刘荣强. 公共约束一系可展开天线四棱锥结构构形综合
Configuration Synthesis of Spatial Rectangular Pyramid Deployable Antenna with Common Constraint of First-Order Screw System[J]. 天线学报, 2017, 06(02): 23-32. http://dx.doi.org/10.12677/JA.2017.62004
参考文献 (References)
- 1. 黄真, 丁华锋. 机构的结构类型综合综述[J]. 燕山大学学报, 2003, 27(3): 189-192.
- 2. Hervé, J.M. (1978) Analyse Structurelle des mécanismes par groupe des déplacements. Mechanism and Machine Theory, 13, 437-450.
- 3. 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006: 346-366.
- 4. 杨廷力, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012: 2-16.
- 5. 杨廷力. 机器人机构拓扑结构学[M]. 北京: 机械工业出版社, 2004: 20-72.
- 6. Gogu, G. (2004) Structural Synthesis of Fully-Isotropic Translational Parallel Robots via Theory of Linear Transformations. European Journal of Mechanics A/Solids, 23, 1021-1039.
- 7. Fang, Y.F. and Tsai, L.W. (2004) Enumeration of a Class of over Constrained Mechanisms Using the Theory of Reciprocal Screws. Mechanism and Machine Theory, 39, 1175-1187.
- 8. 于靖军, 刘辛军, 丁希仑, 戴建生. 机器人机构学的数学基础[M]. 北京: 机械工业出版社, 2008: 194-199.