 Smart Grid 智能电网, 2013, 3, 85-90 http://dx.doi.org/10.12677/sg.2013.33015 Published Online June 2013 (http://www.hanspub.org/journal/sg.html) Nonlinear Robust Excitation Control Based on ESO-Backstepping Method Zhihan Zhang School of Control and Computer Engineering, North China Electric Power University, Baoding Email: 125615140@qq.com Received: Mar. 1st, 2013; revised: Apr. 2nd, 2013; accepted: Apr. 14th, 2013 Copyright © 2013 Zhihan Zhang. This is an open access article distributed under the Creative Commons Attribution License, which permits unre- stricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract: In this paper, the nonlinear robust excitation control of synchronous generator based on the ESO and back- stepping method is proposed. The model uncertainties are compensated by constructed ESO, and the nonlinear parts of the model are retained for using back-stepping design method. Stability control of compensated system is designed us- ing the method of back-stepping. The whole system problem is resolved into low order subsystems design. A simulation case study has carried out on one single machine infinitive bus system by using the Matlab/Simulink software platform. The proposed method has strong robustness, its parameters are easy to select, and static and dynamic characteristics have been verified. Keywords: Extended State Observer (ESO); Back-Stepping Method; Nonlinear; Excitation Control 基于 ESO-逆推法的非线性鲁棒励磁控制 张之涵 华北电力大学控制与计算机工程学院,保定 Email: 125612140@qq.com 收稿日期:2013 年3月1日;修回日期:2013年4月2日;录用日期:2013 年4月14 日 摘 要:本文提出了一种基于 ESO和逆推法相结合的同步发电机非线性鲁棒励磁控制方法。通过构造 ESO 对 模型不确定部分进行补偿,并保留了模型中有利于运用逆推法设计的非线性部分。利用逆推法对补偿后的系统 进行严格的稳定控制律设计。整个系统的设计问题转化为若干低阶子系统的设计,逐步利用李亚普诺夫函数得 到使整个系统渐进稳定的反馈控制律。通过仿真验证,该方法鲁棒性强,参数易于选取,具有良好的静、动态 品质。 关键词:扩张状态观测器;逆推法;非线性;励磁控制 1. 引言 发电机励磁控制是影响电力系统的稳定性的一 个重要因素。由于电力系统本质上是一个非线性系 统,为克服基于线性化的励磁控制方法的缺陷,人们 相继引入了基于微分几何理论的直接反馈线性化[1]和 逆系统[2,3]等方法。但是,以上方法均建立在对象模型 是精确的基础上,不具备参数鲁棒性。扩张状态观测 器(extended state observer, ESO)的出现为人们寻求具 有鲁棒性较强的控制规律提供了一条新的思路。近年 来,ESO已被广泛地应用于电力系统的各个领域[4-6]。 文献[7] 提出了一种基于微分几何理论设计的自抗扰 励磁控制器。由于对系统非线性部分进行了完全补 Copyright © 2013 Hanspub 85  基于 ESO-逆推法的非线性鲁棒励磁控制 偿,不但未充分利用系统的信息,而且加大了ESO的 补偿负担,从而降低了控制器的动态品质。此外,通 过逆推构造李雅普诺夫函数与其他方法相结合设计 的具有强鲁棒性的非线性控制器在电力系统中的应 用亦越来越受到人们的重视[8-10]。文献[11]通过引入自 适应参数,运用含有滑模函数的扩展李亚普诺夫函数 设计了具有较强鲁棒性的控制规律。但该方法推导过 于繁杂,且自适应参数不易选取,不便于推广到工程 实践中。本文提出了一种ESO和逆推法相结合的非线 性鲁棒励磁控制方法。逆推法又称回推法或反演法, 它通常把李亚普诺夫函数的选择和反馈控制律的设 计结合在一起,得到使整个闭环系统渐进稳定的控制 输入[8]。本文通过构造ESO对模型不确定部分进行补 偿,并保留了模型中有利于运用逆推法设计的非线性 部分。利用逆推法对补偿后的系统进行严格的稳定控 制律设计。该方法可以将整个系统的设计问题转化为 若干低阶子系统的设计,逐步利用李亚普诺夫函数得 到使整个系统渐进稳定的反馈控制律。仿真表明,该 方法鲁棒性强,参数易于选取,比基于微分几何理论 设计的自抗扰励磁控制器具有更好静、动态品质。 2. 单输入单输出系统的扩张观测器构造 2.1. HHT基本原理 受到未知外扰作用的非线性单输入单输出系统 表达式为: 1 ,, , nn x fxxtwt btut (1) 式中: 1 ,, , n f xx t 为系统非线性部分,w(t)为未 知外扰,u(t)为系统输入。若 b0为在系统稳态时的取 值,则式(1)可以改写为: 1 00 ,, , nn x fxxt wt btb utbut (2) 记 0 atfwtbtb ut 12 23 010 1 1 nn n xx xx x a tbu txbu t xt yx (3) 令v = b0u为系统的虚拟控制输入,构造扩张状态 观测器为: 1 1211 2322 1 111 nn nn nnn zy zz g zz g zz g zg v (4) 则 10n utvzb (5) 3. ESO-逆推非线性鲁棒控制法 考虑如下非线性单输入单输出系统: x fxbu d (6) 式中:x为n维状态向量;f(x)为非线性部分;u为控 制输入; d为未知外扰;f(x),b,d均为n维匹配向量。 对上述系统建立如下模型: ˆll x fx buxfxbu (7) 其中, T 23 T 11 21212 ,,,0 ˆˆ ˆ ,,,,,,, l ln xxx ffxfxxfxxx n (8) 于是式(6)可写成如下形式: ˆl xfxbud (9) 式中: ˆ l f xfx 为式(6)的模型误差。式(9)可 以进一写成: 为式(1)的总 扰动,它表示系统的内扰和外扰总和。令 1 x xt 00 0 ˆ ˆ l xfxbubbud fx bu (10) , 2 x xt 1n n ,…, x xt ,并将 a(t)扩张为第 n + 1个状态变量,有 1n x tat ,并令 t at , 则系统的扩张状态方程为: 式中:,为系统稳定运行时的b(t) T 0 0, 0,,n b l d 00 b b 值; 为扰动总和,且 各分量 有界,即 i Copyright © 2013 Hanspub 86 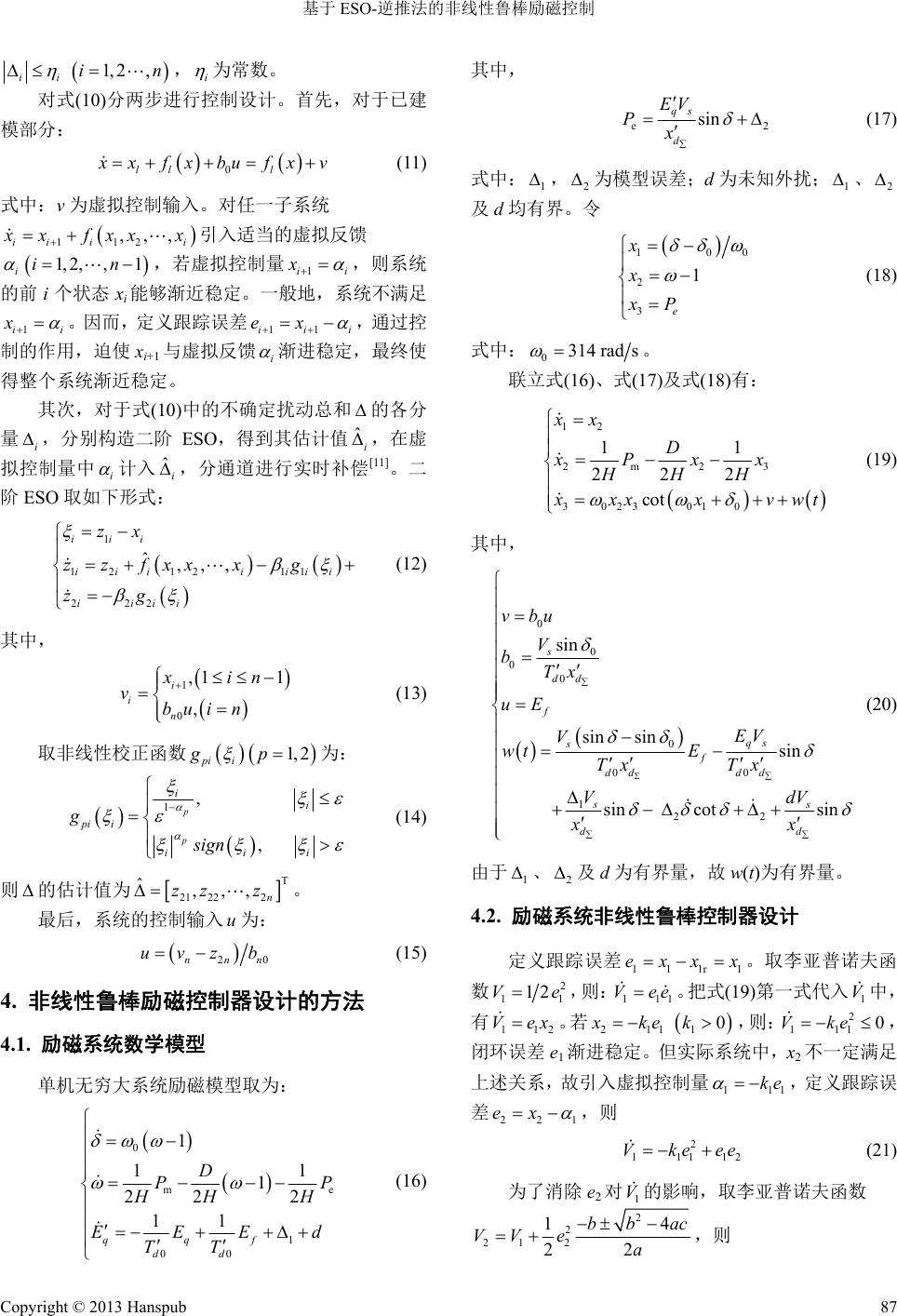 基于 ESO-逆推法的非线性鲁棒励磁控制 2 , in ,i 1, i i 为常数。 对式(10)分两步进行控制设计。首先,对于已建 模部分: 0ll l x xf bufxv x 入。 (11) 式中:v为虚拟控制输 对任一子系统 112 ,,, ii ii x xfxx x 引入适当的虚拟反 拟控制量 1ii x 馈 1, 2,,1 iin ,若 虚 ,则 渐近稳定。一般 统不满足 1ii x 系统 的前 i个状态 xi能够 地,系 。因而,定义跟踪误差 11iii ex ,通 过 控 ,迫使xi+1 与虚拟反馈制的作用 i 渐进稳定,最终使 得整个系统渐近稳定。 其次,对于式(10)中的不确定扰动总和 的各分 量i,分别构造二阶 ESO,得到其估计值 ,在虚 拟控制量中 i ˆi 计入 ˆi ,分通道进行实时补偿[11]。二 阶ESO 取 下形式: zx 如 (12) 其中, (13) 取非线性校正函数 为: 1 12 11 222 ˆ, iii iiii iii iii zz fxx g zg 12 ,, i x ,1 ,i pi 1 0 1 i i n xin vbun 1, 2 i gp 1, p sign , p i i pi i iii g (14) 则 的估计值为。 为: T 21 2 ˆ,,, n z 22 zz 控制输入最后,系统的 u 20nnn uvz b (15) 4. 励磁系统数学模型 单机无穷大系 型取为: 非线性鲁棒励磁控制器设计的方法 统励磁模 4.1. 0 m 1 00 1 11 1e 2 qqf dd PP H EEEd (16) 其中, 22 11 D HH TT e sin qs d EV Px 2 式中: (17) 为模型误差;d为未知外扰; 1 1 ,2 、2 及d均有界。令 10 2 3 1 e x x xP 0 式中: (18) 0rad314 s 。 联立式(16)、式(17)及式(18)有: 12 2m23 3023 010 11 222 xx D xPxx HHH x cotxxxv wt (19) 其中, 0 0 0 0 0 00 1 22 sin sin sinsin sin cotsin s dd f qs s f dd dd ss dd vbu V bTx uE EV V wt E Tx Tx VdV xx (20) 由于 1 、2 及d为有界量,故w(t)为有界量。 4.2. 励磁系统非线性鲁棒控制器设计 定义跟踪误差 1 111r exx x 。取李亚普诺夫 函 数2 11 12Ve,则:第一式代入 中, 。 111 Vee 。把式(19) 1 V 有112 Vex若 2111 0xkek ,则: 11 1 Vke 2 不一定满足 0 x2 1 , 中,闭环误差e1渐进稳定。但实际系统 上述关系,故引入虚拟控制量 ke 11 ,定义跟踪误 差2 e21 x ,则 2 1112 eee (21) 除e李亚普诺 1 Vk 为了消对 的影响,取夫函数 21 V 2 2 212 14 22 bb ac VV ea ,则 Copyright © 2013 Hanspub 87  基于 ESO-逆推法的非线性鲁棒励磁控制 22 211 22111222 keee keeeex 12 V ee1 (22) 把式(19)中第二式入 中,有 ,2 ˆ wz 2 V 211D keeePx x 21 1122 m231 22 2 V e HHH (23) 若 0 3m 211222 222xPDxHHeHkek 22 21122 0Vkeke 。闭环误差 e1,e2渐进稳定。 拟控制量 21122 222PDxHHeHke 则 但 实 2m 际系统中与上述同理,故引入虚 ,定义跟踪误差 332 ex ,则 22 21122 2 1 2 Vkeke e 3 e H (24) 同理,取 2 32 3 12e,则 VV 22 31122 2333 2 e 2 11 2 22 3332 1 2 1 2 Vkeke eee H kek eeeex H (25) 把式(19)中第三式代入 中,有 3 V 22 31122 23 302301 02 1 2 cot Vkekeee H exx xvwt (26) 取 0231 0 cotvxx x 0 2 233 3 1ˆ0 2ek ew k H (27) 则 (28) 式中: 是的实时估计值。 对于 可以运用式(12),通过构造二阶 进行实时观测: 其中 222 31122333 ˆ V kekekeeww ˆ ww ˆ wESO 对w 13 1202301011 cot zx zz xxxg zg 0 bu (29) 22 2 , 1, sign , i i i g 1, 2i (30) 式中:。显然,只要适当的选取ESO 的参数 12 ,, 12 ,, 31 V k 22 122 ekek ,就能使 快速收敛于 而使 2 zw,从 2 33 0e 。系统式(19) 环误 差方程为 1 2 的闭 111 22 33 r exx ex ex (31) 渐近稳定,最终收敛于原点。致使系统式(19)在 后, (27)可以得到 的 : 遭受扰动 最终能稳定在平衡状态。 由式 单机无穷大系统式(16) 励磁 控制律 30 e 1 032220 0 e222 ,, , , ,fP z 由2m 211 222PDxHHeHk 1 1c ot 1 2 2 f Ek P H kkz H 2 b (32) 2 e ,可知式 (32)中包含的虚拟控制量 2m ,,gP 。因此, 构成 Ef的各自变量易于测取,而 2 则采用非线性微 分跟踪器TD 来提取。 5. 仿真分析 本文发电机采用六阶详细模型进行模拟。 经变压器及两回输电线接入无穷大系统。系统接线如 图1所示。 仿真系统参数具体如下:xd=1.035, 发电机 d0.296x , d0.252x ,x=0.474 , , qqd0 0.243x 4.45 s T , d0 0.06sT ,q0 0.1 sT ,H = 3.2 s,D , xL = 0.13。 运行状态:Pe0 = 0.75,δ0 = 19.4˚。 i 取2~5,本文中 k1 = 2,k2 = 2,k3 = 3, ESO < 1,本文中 = 0 s,xT = 0.16 发电机稳定 由于采用详细的汽轮发电机模型,根据文献[12], 发电机的机械阻尼一般 D取为 0 s。逆推法中的参数 ki(= 1,2,3)建议 中的参数 αi(I = 1,2)一般满足0 ≤ αi Figure 1. Sing l e line diagram of the studied power system 图1. 单机无穷大系统连接示意图 Copyright © 2013 Hanspub 88 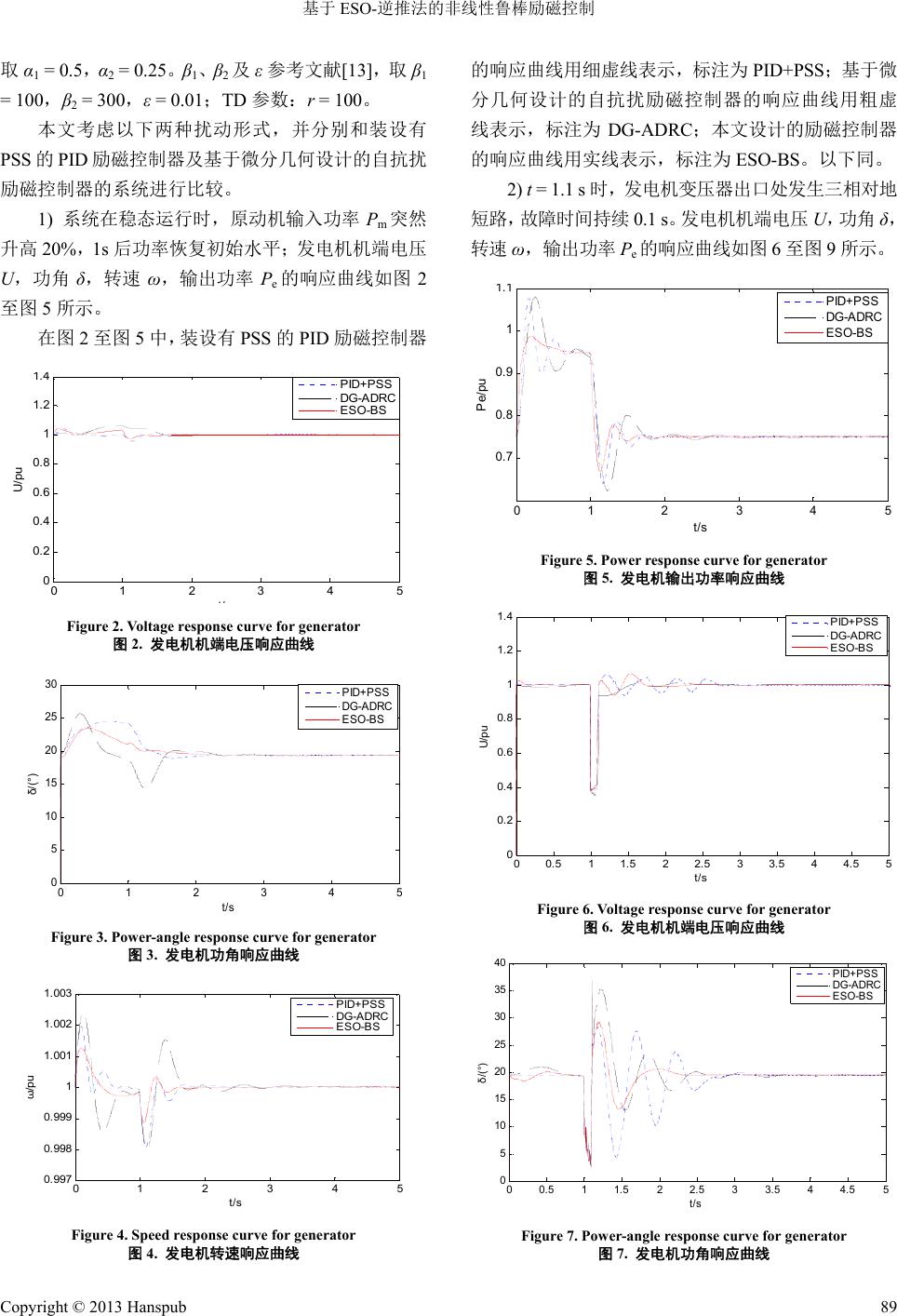 基于 ESO-逆推法的非线性鲁棒励磁控制 取α1 = 0.5,α2 = 0.25。β1、β2及ε参考文献[13],取β1 = 100,β2 = 300,ε = 0.01;TD 参数:r = 100。 本文考虑以下两种扰动形式,并分别和装设有 PSS 的PID 励磁控制器及基于微分几何设计的自抗扰 励磁控制器的系统进行比较。 1) 系统在稳态运行时,原动机输入功率Pm突然 升高 20%,1s 后功率恢复初始水平;发电机机端电压 U,2 至图 5所示。 功角 δ,转速 ω,输出功率 Pe的响应曲线如图 在图 2至图 5中,装设有PSS 的PID 励磁控制器 01 23 4 5 0 0. 2 0. 4 0. 6 0. 8 1 1. 2 1 . 4 t/ U/p u PID+PSS DG-ADRC ESO-BS Figure 2. Voltage response curve for generator 图2. 发电机机端电压响应曲线 0 1 2 3 4 5 0 5 10 15 20 25 30 t/s δ/(°) PID+PSS DG-ADRC ESO-BS Figure 3. Power-angle response curve for generator 图3. 发电机功角响应曲线 012 3 4 5 0.997 0.998 0.999 1 1.001 1.002 1.003 t/s ω/pu PID+PSS DG-A DRC ESO-BS Figure 4. Speed response curve for generator 图4. 发电机转速响应曲线 的响应曲线用细虚线表示,标注为 PID+PSS;基于微 分几何设计的自抗扰励磁控制器的响应曲线用粗虚 线表示,标注为 DG-ADRC;本文设计的励磁控制器 的响应曲线用实线表示,标注为ESO-BS。以下同。 2) t = 1.1 s 时,发电机变 压器出口处发生三相对地 短路,故障时间持续 0.1 s。发电机机端电压 U,功角 δ, 转速 ω,输出功率 Pe的响应曲线如图 6至图 9所示。 0 123 4 5 0. 1 . 1 7 0. 8 0. 9 1 t/s Pe/pu PID+PSS DG-ADRC ESO-BS Figure 5. Power response curve for generator 图5. 发电机输出功率响应曲线 00.5 11.5 22.5 33.5 44.5 5 0 0.2 0.4 0.6 0.8 1 1.2 1.4 t/s U/p u PID+PSS DG- ADR C ESO-BS Figure 6. Voltage response curve for generator 图6. 发电机机端电压响应曲线 40 00.5 11.5 22.5 33.5 44.5 5 0 5 10 15 20 25 30 PID+PSS DG-A DRC 35 ESO-BS δ/(°) t/s Figure 7. Power-angle response curve for generator 图7. 发电机功角响应曲线 Copyright © 2013 Hanspub 89 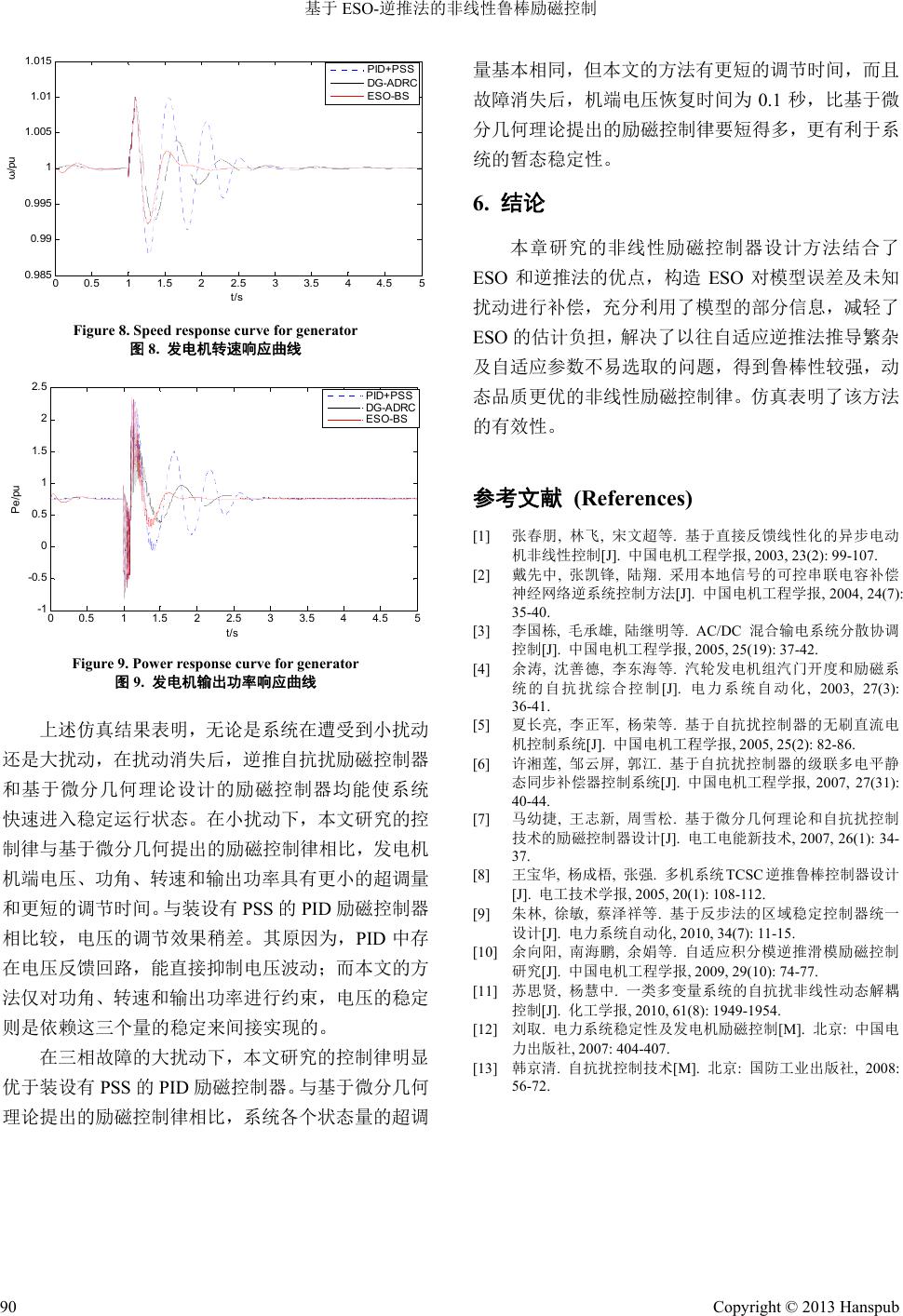 基于 ESO-逆推法的非线性鲁棒励磁控制 Copyright © 2013 Hanspub 90 00.5 11.5 22.5 33.5 44.5 5 0. 985 0. 99 0. 995 1 1. 005 1. 01 1. 015 t/s ω/pu PID+PSS DG-ADRC ESO-BS Figure 8. Speed response curve for generator 图8. 发电机转速响应曲线 00.5 11.5 22.5 33.5 44.5 5 -1 -0. 5 0 0. 5 1 1. 5 2 2. 5 t/s Pe/pu PID+PSS DG-A DRC ESO-BS Figure 9. Pow 图9. 发电机输出功率响应曲线 上述仿真结果表明,无论是系统在遭受到小扰动 还是大扰动,在扰动消失后,逆推自抗扰励磁控制 和基于微分几何理论设计的励磁控制器均能使系统 快速进入稳定运行状态。在小扰动下,本文研究的 制律与基于微分几何提出的励磁控制律相比,发电机 机端电压、功角、转速和输出功率具有更小的超调量 和更短的调节时间。与装设有 PSS的PID 励磁控制 相比较,电压的调节效果稍差。其原因为,PID 中存 在电压反 文的方 仅对功角、转速和输出功率进行约束,电压的稳 则是 有利于系 统的 决了以往自适应逆推法推导繁杂 数不易选取的问题,得到鲁棒性较强,动 非线性励磁控制律。仿真表明了该方法 的有 控制方法[J]. 中国电机工程学报, 2004, 24(7): [3] 李国栋, 毛承雄, 陆继明等. AC/DC 混合输电系统分散协调 控制[J]. 中国电机工程学报, 2005, 25(19): 37-42. 发电机组汽门开度和励磁系 力系统自动化, 2003, 27(3): . 电力系 电机 工业出版社, 2008: er response curve for g en e ra t or 器机控 控 40 器技术 馈回路,能直接抑制电压波动;而本 法定 [1 依赖这三个量的稳定来间接实现的。 在三相故障的大扰动下,本文研究的控制律明显 优于装设有PSS 的PID 励磁控制器。与基于微分几何 理论提出的励磁控制律相比,系统各个状态量的超调 量基本相同,但本文的方法有更短的调节时间,而且 故障消失后,机端电压恢复时间为0.1 秒,比基于微 分几何理论提出的励磁控制律要短得多,更 暂态稳定性。 6. 结论 本章研究的非线性励磁控制器设计方法结合了 ESO 和逆推法的优点,构造 ESO 对模型误差及未知 扰动进行补偿,充分利用了模型的部分信息,减轻了 ESO 的估计负担,解 及自适应参 态品质更优的 效性。 参考文献 (References) [1] 张春朋, 林飞, 宋文超等. 基于直接反馈线性化的异步电动 机非线性控制[J]. 中国电机工程学报, 2003, 23(2): 99-107. [2] 戴先中, 张凯锋, 陆翔. 采用本地信号的可控串联电容补偿 神经网络逆系统 35-40. [4] 余涛, 沈善德, 李东海等. 汽轮 统的自抗扰综合控制[J]. 电 36-41. [5] 夏长亮, 李正军, 杨荣等. 基于自抗扰控制器的无刷直流电 . 中005, 25(2): 82-86. 制系统[J] 国电机工程学报, 2 [6] 许湘莲, 邹云屏, 郭江. 基于自抗扰控制器的级联多电平静 态同步补偿器控制系统[J]. 中国电机工程学报, 2007, 27(31): -44. [7] 马幼捷, 王志新, 周雪松. 基于微分几何理论和自抗扰控制 励 电工电能新技术, 2007,技术的 磁控制器设计[J]. 26(1): 34- 37. [8] 王宝华, 杨成梧, 张强. 多机系统 TCSC 逆推鲁棒控制器设计 [J]. 电工 学报, 2005, 20(1): 108-112. [9] 朱林, 徐敏, 蔡泽祥等. 基于反步法的区域稳定控制器统一 力系 (7): 11-15. 设计[J]. 电 统自动化, 2010, 34 [10] 余向阳, 南海鹏, 余娟等. 自适应积分模逆推滑模励磁控制 研究[J]. 中国电机工程学报, 2009, 29(10): 74-77. 1] 苏思贤, 杨慧中. 一类多变量系统的自抗扰非线性动态解耦 控制[J]. 化工学报, 2010, 61(8): 1949-1954. [12] 刘取统稳定性及发 励磁控制[M]. 北京: 中国电 力出版社, 2007: 404-407. [13] 韩京清. 自抗扰控制技术[M]. 北京: 国防 56-72. |