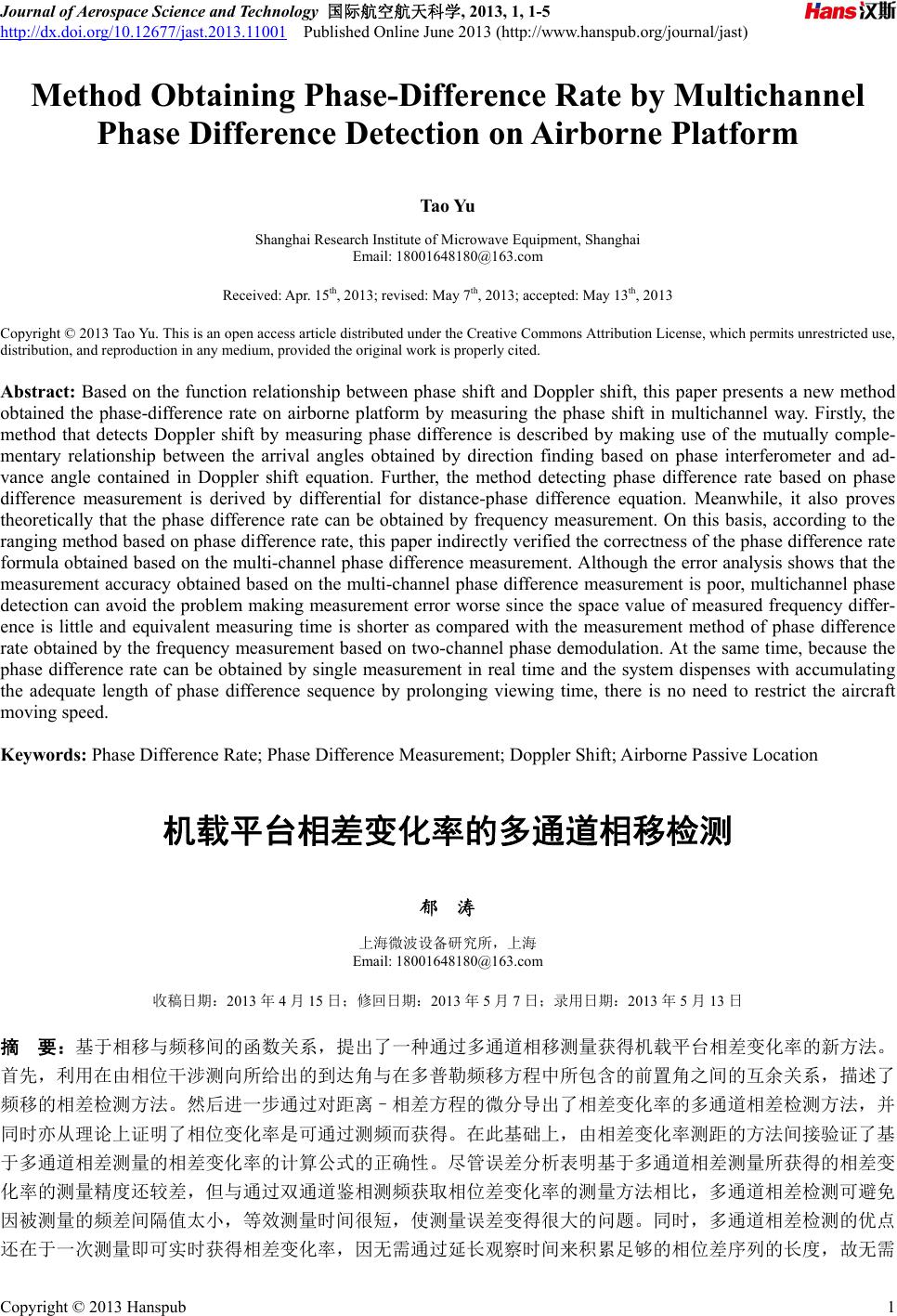
 Journal of Aerospace Science and Technology 国际航空航天科学, 2013, 1, 1-5 http://dx.doi.org/10.12677/jast.2013.11001 Published Online June 2013 (http://www.hanspub.org/journal/jast) Method Obtaining Phase-Difference Rate by Multichannel Phase Difference Detection on Airborne Platform Tao Yu Shanghai Research Institute of Microwave Equipment, Shanghai Email: 18001648180@163.com Received: Apr. 15th, 2013; revised: May 7th, 2013; accepted: May 13th, 2013 Copyright © 2013 Tao Yu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract: Based on the function relationship between phase shift and Doppler shift, this paper presents a new method obtained the phase-difference rate on airborne platform by measuring the phase shift in multichannel way. Firstly, the method that detects Doppler shift by measuring phase difference is described by making use of the mutually comple- mentary relationship between the arrival angles obtained by direction finding based on phase interferometer and ad- vance angle contained in Doppler shift equation. Further, the method detecting phase difference rate based on phase difference measurement is derived by differential for distance-phase difference equation. Meanwhile, it also proves theoretically that the phase difference rate can be obtained by frequency measurement. On this basis, according to the ranging method based on phase difference rate, this paper indirectly verified the correctness of the phase difference rate formula obtained based on the multi-channel phase difference measurement. Although the error analysis shows that the measurement accuracy obtained based on the multi-channel phase difference measurement is poor, multichannel phase detection can avoid the problem making measurement error worse since the space value of measured frequency differ- ence is little and equivalent measuring time is shorter as compared with the measurement method of phase difference rate obtained by the frequency measurement based on two-channel phase demodulation. At the same time, because the phase difference rate can be obtained by single measurement in real time and the system dispenses with accumulating the adequate length of phase difference sequence by prolonging viewing time, there is no need to restrict the aircraft moving speed. Keywords: Phase Difference Rate; Phase Difference Measurement; Doppler Shift; Airborne Passive Location 机载平台相差变化率的多通道相移检测 郁 涛 上海微波设备研究所,上海 Email: 18001648180@163.com 收稿日期:2013 年4月15 日;修回日期:2013年5月7日;录用日期:2013 年5月13 日 摘 要:基于相移与频移间的函数关系,提出了一种通过多通道相移测量获得机载平台相差变化率的新方法。 首先,利用在由相位干涉测向所给出的到达角与在多普勒频移方程中所包含的前置角之间的互余关系,描述了 频移的相差检测方法。然后进一步通过对距离–相差方程的微分导出了相差变化率的多通道相差检测方法,并 同时亦从理论上证明了相位变化率是可通过测频而获得。在此基础上,由相差变化率测距的方法间接验证了基 于多通道相差测量的相差变化率的计算公式的正确性。尽管误差分析表明基于多通道相差测量所获得的相差变 化率的测量精度还较差,但与通过双通道鉴相测频获取相位差变化率的测量方法相比,多通道相差检测可避免 因被测量的频差间隔值太小,等效测量时间很短,使测量误差变得很大的问题。同时,多通道相差检测的优点 还在于一次测量即可实时获得相差变化率,因无需通过延长观察时间来积累足够的相位差序列的长度,故无需 Copyright © 2013 Hanspub 1 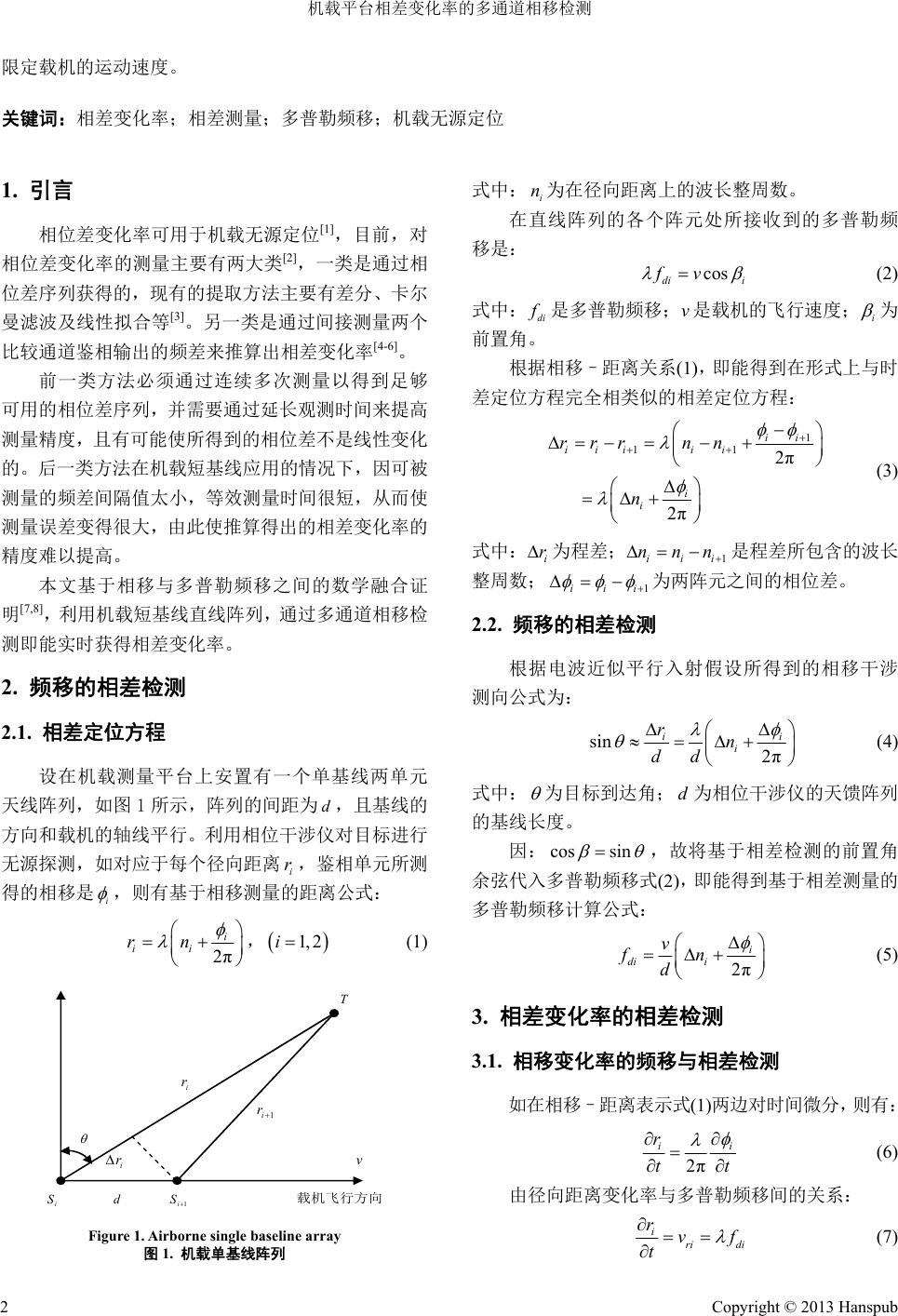 机载平台相差变化率的多通道相移检测 Copyright © 2013 Hanspub 2 d i r i 限定载机的运动速度。 关键词:相差变化率;相差测量;多普勒频移;机载无源定位 1. 引言 式中:为在径向距离上的波长整周数。 i n cos di i fv 在直线阵列的各个阵元处所接收到的多普勒频 移是: 相位差变化率可用于机载无源定位[1],目前,对 相位差变化率的测量主要有两大类[2],一类是通过相 位差序列获得的,现有的提取方法主要有差分、卡尔 曼滤波及线性拟合等[3]。另一类是通过间接测量两个 比较通道鉴相输出的频差来推算出相差变化率[4-6]。 前一类方法必须通过连续多次测量以得到足够 可用的相位差序列,并需要通过延长观测时间来提高 测量精度,且有可能使所得到的相位差不是线性变化 的。后一类方法在机载短基线应用的情况下,因可被 测量的频差间隔值太小,等效测量时间很短,从而使 测量误差变得很大,由此使推算得出的相差变化率的 精度难以提高。 本文基于相移与多普勒频移之间的数学融合证 明[7,8],利用机载短基线直线阵列,通过多通道相移检 测即能实时获得相差变化率。 2. 频移的相差检测 2.1. 相差定位方程 设在机载测量平台上安置有一个单基线两单元 天线阵列,如图 1所示,阵列的间距为,且基线的 方向和载机的轴线平行。利用相位干涉仪对目标进行 无源探测,如对应于每个径向距离 ,鉴相单元所测 得的相移是 ,则有基于相移测量的距离公式: 2π i ii rn , 1, 2i (1) i r 1i r T i r i S d 1i S v 载机飞行方向 Figure 1. Airborne single baseline array 图1. 机载单基线阵列 di fi (2) 式中: 是多普勒频移;v是载机的飞行速度; 为 前置角。 根据相移–距离关系(1),即能得到在形式上与时 差定位方程完全相类似的相差定位方程: 1 11 2π 2π ii iii ii i i rrr nn n i r (3) 1iii nnn 式中: 为程差; 1iii 是程差所包含的波长 整周数; 为两阵元之间的相位差。 2.2. 频移的相差检测 根据电波近似平行入射假设所得到的相移干涉 测向公式为: sin 2π ii i rn dd (4) 式中: 为目标到达角; 为相位干涉仪的天馈阵列 的基线长度。 d sin 因: cos ,故将基于相差检测的前置角 余弦代入多普勒频移式(2),即能得到基于相差测量的 多普勒频移计算公式: 2π i di i v fn d (5) 3. 相差变化率的相差检测 3.1. 相移变化率的频移与相差检测 如在相移–距离表示式(1)两边对时间微分,则有: 2π ii r tt (6) 由径向距离变化率与多普勒频移间的关系: iri di rvf t (7) 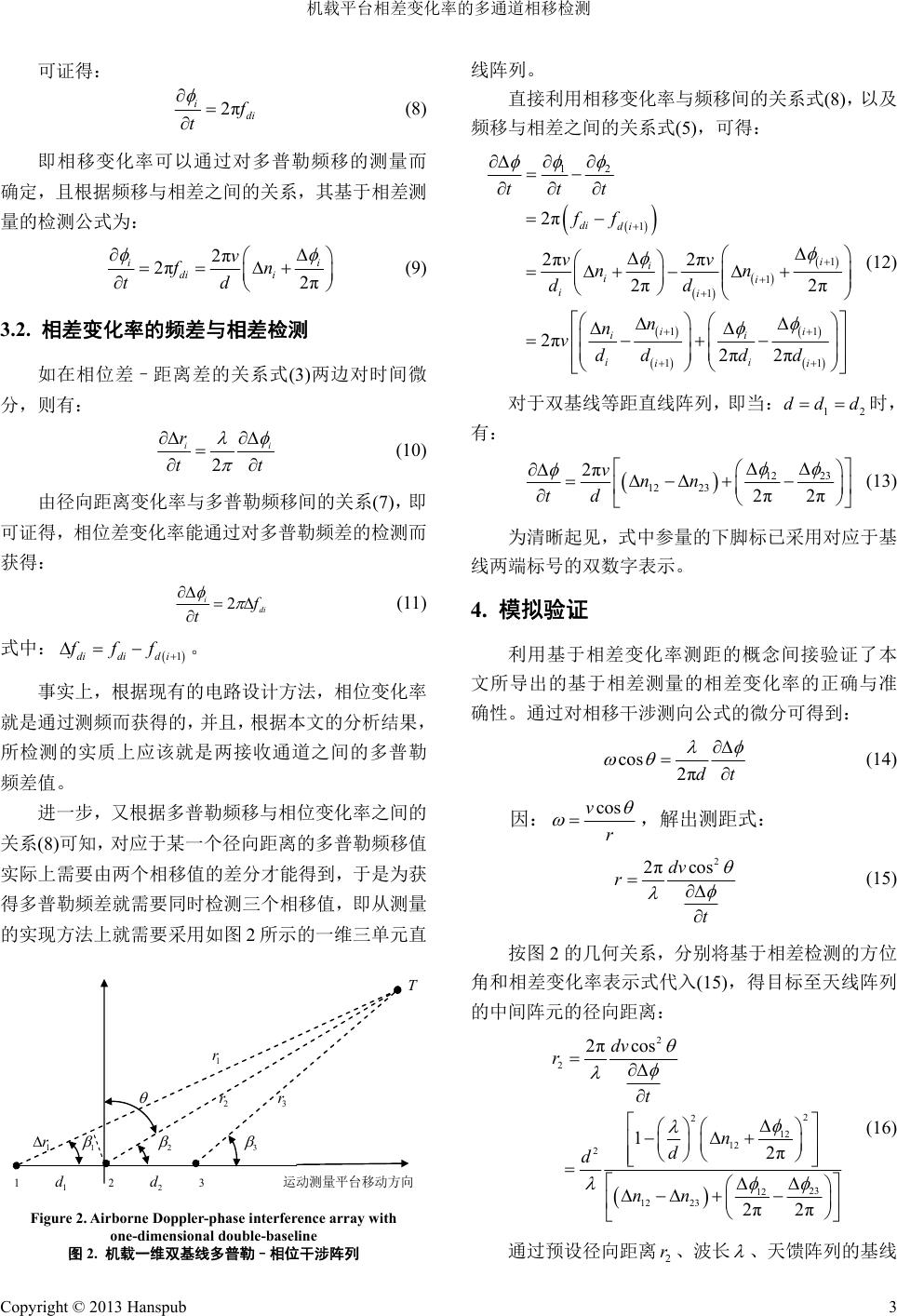 机载平台相差变化率的多通道相移检测 可证得: 2π idi f t (8) 即相移变化率可以通过对 确定,且根据频移与相差之间的关系,其基于相差测 量的 多普勒频移的测量而 检测公式为: 2π 2π 2π di i fn d ii v t (9) 3.2. 相差变化率的频差与相差检测 对时间微 分,则有: 如在相位差–距离差的关系式(3 )两边 2 ii tt r (10) 由径向距离变化率与多普勒频 可证得,相位差变化率能通过对多普勒频差的检测而 获得 移间的关系(7),即 : 2 idi f t (11) 1 di di fff 。 上,根据现有的电路设计方法,相位变化率 就是通过测频而获得的,并且,根据本文的分析结果, 所检 ,对应于某一个径向距离的多普勒频移值 实际 式中: di 事实 测的实质上应该就是两接收通道之间的多普勒 频差值。 进一步,又根据多普勒频移与相位变化率之间的 关系(8)可知 上需要由两个相移值的差分才能得到,于是为获 得多普勒频差就需要同时检测三个相移值,即从测量 的实现方法上就需要采用如图 2所示的一维三单元直 T 1 r 2 r 3 r 1 r 1 2 3 1 1 d 2 2 d 3 运动测量平台移动方向 Figure 2. Airborne Doppler-phase interference array with one-dimensional double-baseline 图2. 机载一维双基线多普勒–相位干涉阵列 线阵 直接 ),以 及 之间的关系式(5),可得: 列。 利用相移变化率与频移间的关系式(8 频移与相差 12 ttt 1 1 1 1 11 11 2π 2π2π 2π2π 2π 2π2π di di i i ii ii ii ii ii ii ff vv nn dd n n vdd d d (12) 对于双基线等距直线阵列,即当:12 dd d时, 有: 23 12 12 232π2π nn td 2πv (13) 为清晰起见,式中参量的下脚标已采用对应 线两端标号的双数字表示。 差变化率测距的概念间接验证了本 文所导出的基于相差测量的相差变化率的正确与准 确性 于基 4. 模拟验证 利用基于相 。通过对相移干涉测向公式的微分可得到: cos 2πdt (14) 因: cosv r ,解出测距式: 2 co2πsvd r t (15) 按图 2的几何关系,分别将基于相差检测的方位 角和相差变化率表示式代入(15),得目标至天线阵列 的中 间阵元的径向距离: 2 2 2cosπdv r 2 2 12 12 2 23 12 312 2 2 1π 2π2π t n d d n n (16) 通过预设径向距离 2 r、波长 、天馈阵列的基线 Copyright © 2013 Hanspub 3  机载平台相差变化率的多通道相移检测 长度 d并使方位角 2 , 在规定的区间内线性变化,即 可逐次解出其余的径向距离,随后,用向零方向取整 函数求得各个径向距离的波长整周数: 11 ()nFIXr 22 ()nFIXr 33 ()nFIXr 然后,解出数值小于 π 的相移理论值: 111 π()rn2 222 2π()rn 333 2π()rn 将i n和i 的理论计算值代入式(16)解出径向距离 的测算值,并将测算值和理论值进行比较可给出测 距公式的准确性,由此间接得到相差变化率的准确 度。 相对计 算误差曲线,所用参数亦在图中标注,注意测距表示 式与速度是无关的。 5. 误差分析 生 2 r 图3给出了不同短基线长度时径向距离的 根据误差估计理论,由相差和速度测量误差所产 的相差变化率的测量误差是: 2 22 11 iii uu v pv (17) 式中: ut 为相差变化率; v 为速度测量误差 的均方根值,分析计算时取 0.1ms ; v 为相位 差测量误差的均方根值,取 20 π180 ,单位为弧 度。 相差变化率对各个相差的偏微分为: 12 uv d (18) 23 对速度的偏微分是: uv d (19) 23 12 2πunn (20) 图4给出了在不同基线长度时的相差变化率的测 12 23 2π2πvd 010 20 30 4050 60 70 8090 -0.005 0 0. 005 0. 01 0. 015 0. 02 0. 025 0. 03 0. 035 0.04 d = 10 λ d = 30 λ d = 50 λ 到达角 θ 2 / (°) 相对计算误差 ε / (%) r 2 = 100 km λ = 0.03 m Figure 3. Relative calculate error of ranging 图3. 测距相对计算误差 010 20 30 4050 60 70 80 90 20 40 60 80 100 120 140 160 180 到达角 θ 2 / (°) 测量误差 σ / (1/s) d = 10 λ d = 30 λ d = 50 λ r 2 = 100 km λ = 0.03 m v = 100 m/s σ φ = 20π/180 σ v = 0.1 m/s Figure 4. Measuring error for phase difference rate at the different baseline 图4. 不同基线时的相差变化率测量误差 量误差,从中可看到,相差变化率的测量误差主要由 测量相差的误差所决定,当速度和基线长度都为定值 时,在整个到达角的变化范围内,相差变化率的测量 误差基本上是一个常数。由于直接和速度成正比,基 于相差检测的相差变化率的测量误差是比较大的。增 加基线的长度或降低飞行速度都能有效降低测量误 测量误差的 精度。 真计算时所采用的参数已在图中标示。 差,显然,从数学表示式即可看出,降低相差变化率 另一个有效途径是提高相差的测量 仿 6. 结语 尽管初步的误差分析表明基于多通道相移测量 Copyright © 2013 Hanspub 4  机载平台相差变化率的多通道相移检测 Copyright © 2013 Hanspub 5 其所具有的优点还在于实时性更好,理论 测即可获得相位差变化率,与通过检测相 差序 : 32-34,51. [3] 朱伟强, 黄培康, 马琴. 基于相位差变化率测量的单站定位 方法[J]. 系统工程与电子技术, 2008, 30(11): 2108-2111. 的测量方法及其测量精度分 01, 23(1): 20-23. 万方 江, 郁春来相位率测 t In- 来检测相差变化率方法的测量误差比较大,但从工程 应用的角度来看,在短基线应用的情况下,测相移比 测频移更有利于提高测量精度,与通过双通道鉴相测 频获取相位差变化率的测量方法相比,避免了因被测 量的频差间隔值太小,等效测量时间很短,使测量误 差变得很大的问题。 此外, 上一次探 位 [ 列获得相位差变化率的测量方法不同,其无需通 过延长观察时间来提高测量精度。事实上,一旦观测 时间较长时,相位差就有可能不是线性变化的。进一 步,因测量基本上是实时的,无需通过延长观察时间 来积累足够的相位差序列的长度,故无需限定载机作 匀速直线运动。 参考文献 (References) [1] 孙仲康. 单站无源定位跟踪技术[M]. 北京: 国防工业出版社, 2008. [2] 黄登才, 丁敏. 测相位差变化率无源定位技术评述[J]. 现代 雷达, 2007, 29(8) [4] 邓新蒲, 祁颖松. 相位差变化率 析[J]. 系统工程与电子技术, 20 5] , 丁建 . 一种雷达脉冲信号 差变化 量的新方法[J]. 系统工程与电子技术, 2011, 33(6): 1257-1260, 1304. [6] 曾傕. 相位差变化率的测量方法[J]. 航天电子对抗, 2003, (6): 36-38. [7] T. Yu, Airborne passive localization method based on Doppler- phase interference measurement. In: I. Padron, Ed., Recen terferometry Applications in Topography and Astronomy, InTech Publisher, 2012: 133-168. [8] 郁涛. 机载平台相对角速度的相移检测法[J]. 天线学报, 2012, 1(2): 18-21. |