设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
A
dvances in E
nergy and P
ower
E
ngineering
电力与能源进展
, 2013,
1
,
77-88
http://dx.doi.org/10.12677/aepe.2013.12014
Published Online
June
2013 (http://www.hanspub.org/journal/
aepe.html
)
Study on the Real-Time Sampling System of
PWM
Voltage in
the Power Hardware-
in
-the-Loop System
*
Qingjun
Huang
1
,
Liangchun
Liu
2
,
C
hang
de
Chen
3
1
Huazhong University of Science and Technology
,
Wuhan
2
Wuhan Me
lit Communication Co.,
Ltd.
,
Wuhan
3
CWB
Automotive (Zhejiang) Co., Ltd
.,
Wenzhou
Email:
dochuang@163.com,
liuliangchun1985@163.com,
changde.chen@cwb.com.cn
Received:
Ma
r.
18
th
, 201
3
; revised:
Apr.
12
th
, 2013; accepted:
Apr.
23
rd
, 201
3
Copyright
© 2013 Qingjun Huang
et al
. This
is an open access article distributed under the Creative Commons Attribution License, which
permits
unr
e
stricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Abstract:
In the PHIL system, real
-
time samp
ling for
PWM
wave voltage is the base of real
-
time digital simulation.
Instantaneous sampling was no longer applicable, while low
-
pass filter sampling would bring sampling delay and
caused system instability. A mean time
-
domain sampling system was presented, and its sampled voltage waveform was
analized to optimiz
e
selectting the sampling frequency. The theoretical analysis and simulation results showed that: The
sampling method could accurately extract the equivale
nt component of the
PWM
voltage
,
and
the s
ampled voltage
waveform distortion could be inhibitted by optimizing the sampling frequency
.
The simulation results verified the e
ffec
-
tiveness and feasibility of the sampling method.
Keywords:
PWM
Voltage Detector;
Ti me
-
Domain
Mean Sampling
;
Hardware
-in-t
he
-
Loop Simulation
; Sampled
Vo l
t
age Waveform
功率型半实物仿真系统中高频脉波电压的实时采样
*
黄清军
1
,刘良春
2
,陈昌德
3
1
华中科技大学,武汉
2
武汉迈力特通信有限公司,武汉
3
合兴汽车电子有限公司,温州
Email:
dochuang@163.com, liuliangchun1985@163.com, changde.chen@cwb.com.cn
收稿日期:
2013
年
3
月
18
日;修回日期:
2013
年
4
月
12
日;录用日期:
2013
年
4
月
23
日
摘
要:
半实物仿真系统中通常需要对高频
PWM
脉波电压进行离散采样以实时数字仿真,瞬时采样不再适用,
而低通滤波采样会带来采样延时,影响动态响应速度,甚至引起系统不稳定性。本文研究了基于时域均值采样
系统的积分复位采样法,分析了采样电压波形及谐波分量,确定了采样频率的优化选择原则。理论分析和仿真
结果表明:该采样方法可以实现
PWM
脉波电压采样,能实时准确的提取其等效分量,通过优选采样频率能抑
制采样电压波形畸变、减小谐波,实现无延时采样,验证了该采样方法的有效性和可行性。
关键词:
硬件在回路仿真;
PWM
脉波电压检测;时域均值采样;采样电压谐波
1.
引言
硬件在回路仿真
(
Hardware
-
in
-
th e
-
Lo
op Simul
a-
tion
,
HIL)
是一种置信度很高的半实物仿真系统,系统
中部分单元
(
如功率变换器
)
采用实时仿真单元进行软
件仿真,而被测单元
(
如数字控制器
)
为硬件实物,两
*
资助信息:国家自然科学基金项目
(
50977036
)
。
Copyright © 201
3 Hanspub
77
功率型半实物仿真系统中高频脉波电压的实时采样
者之间通过特定的接口电路构成完整系统
[1,2]
。相
对于
纯软件仿真,系统中包含了实际被测硬件单元,避免
了被测单元的建模误差,能更全面反应被试硬件单元
的工作特性;相对于纯硬件平台,又能大幅度降低系
统成本节省测试周期,提高系统灵活性,因而是一种
灵活而又可靠的测试系统。根据被试设备的性质,
HIL
系统主要包括以下三种:
1
)
控制器硬件在回路仿
真
(
Controllor
Hardware-
in
-
the-
Loop Simulation
, C
HIL)
,
系统中被测硬件和仿真单元间交换信号量,用于控制
器的测试
[3]
;
2)
功率型硬件在回路仿真
(
Power
Har
d
ware
-
in
-
the
-
Loop Simulation
,
PHIL)
,系统中包含
实际的功率型单元,可用于电力设备
(
如局部电网、变
流器、电机组等
)
的测试
[4
-8]
;
3
)
机械型硬件在回路仿
真
(
Mech
Hardware-
in
-
the-
Loop Simul
a
tion
,
M
HIL)
,系
统中被试单元和仿真单元之间通过机械传动部分相
连,用于机电系统测试。其中
CHIL
和
PHIL
系统在
电气领域正日渐受到重视,在电力系统动模试验、电
机驱动系统、电动汽车领域都已有广泛应用。当用
PHIL
技术构造电力变换器测试系统时,由于电力变
换器的端口电压
(
或
HIL
中控制器驱动信号
)
一般为不
易离散采样的高频
PWM
脉波,必须采用特殊的接口
采样单元检测端口量之后才能用于数字系统仿真。
在常规系统中,一般可采用低通滤波器来滤除
PWM
脉波电压中的高频脉动谐波后再进行瞬时采
样。但在
PHIL
系统中,低通滤波器的引入必然会影
响系统带宽和动态响应速度,但
PHIL
系统中具有闭
环控制系统时,该低通单元的延时可能对系统产生重
要影响,轻则引仿真严重失真,重则导致系统不稳定。
为克服瞬时采样时电气量脉动引起的采样误差,文献
[9]
中提出了平均值采样系统。包括多次采样平均法、
V/f/D
变换法、
Σ/Δ
变换法、定时积分复位采样法,其
中后三者都是基于输入量的时域积分采样系统
(
简称
为时域均值采样系统
)
。其 中
V/f/D
变换法和
Σ/Δ
变换
法主要用于含有高频纹波的连续量检测,而没有应用
于
PWM
脉波电压检测,文献
[6]
介绍了定时积分复位
采样法的原理,但对采样电压谐波及其延时特性缺乏
深入研究。
本文针对
PHIL
系统模拟电机特性时需要采集端
口
PWM
脉波电压,以进行实时仿真并构成闭环系统,
为此研究了
PWM
脉波电压的均值检测系统。对均值
采样法的采样波形、谐波含量、采样延时等进行深入
分析、从而为采样频率的优选确定依据。文中首先介
绍了积分复位采样系统的工作原理,分析了同步采样
和异步采样时的采样电压波形和谐波分量,研究了采
样系统对输入量的延时和采样单元等效模型,最后确
定了采样频率的选取原则。仿真结果表明:该采样方
法能准确提取
PWM
脉波电压中有效分量;通过优化
采样频率选择使得系统延时可以忽略;离散采样电压
与原
PWM
脉波电压作用于电机时,效果基本相同;
从而说明了采样方法的有效性和准确性。
2.
PWM
脉波电压采样的应用背景
PWM
脉波电压采集器主要应用于
HIL
系统中两
个单元的接口,如控制器与模拟的被控制对象之间的
驱动信号检测,功率变换器与模拟电气负载之间的
PWM
脉波电压检测。本文是在电机模拟系统利用
PWM
脉波电压采样单元。电机模拟器通过控制变换
器产生特定电压电流来实现负载模拟
[6]
。由于电机驱
动器一般采用电压型逆变器,接口电压由电机驱动器
确定,所以电机模拟的主要任务就是产生与实际接电
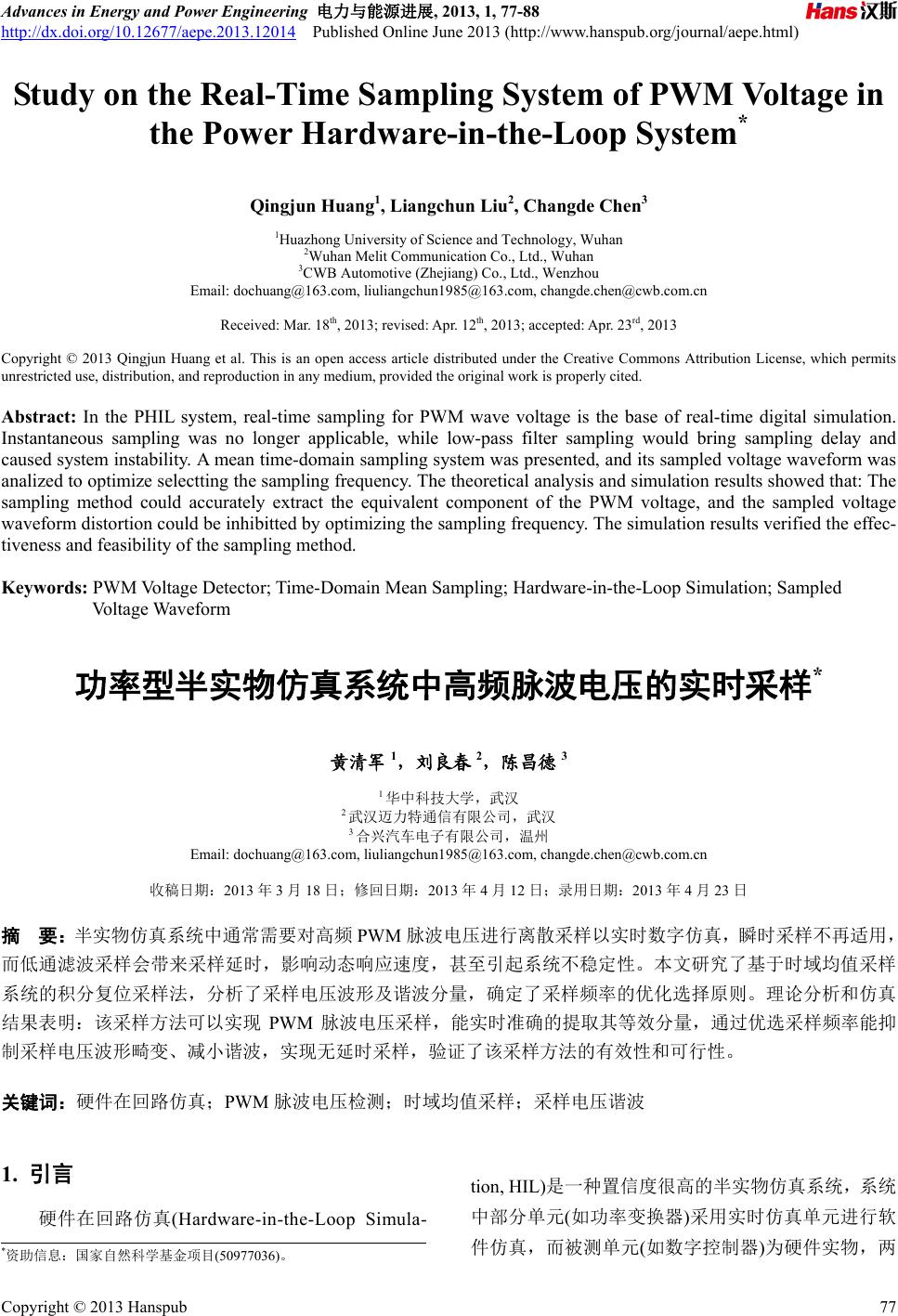
机时一致的端口电流。为此,电机模拟器主要包括电
压采样器、电机模型实时仿真器、电流控制器和功率
变换器四个功能单元,
如图
1
所示。其中前两者用于
产生端口电流指令,后两者进行电流跟踪简称为电流
跟随器。电机模型实时仿真器需要以采样电压为输入
量进行实时仿真,因此端口电压采样是电机模拟的基
础。
3.
PWM
电压采样器
3.1. PWM
电压采样器的工作原理
电机端口电压通常为
高频
PWM
脉波,
不易直接
瞬时采样。为此文献
[6]
中提出了对
PWM
脉波进行定
时积分的采样法。积分复位采样法属于一种时域均值
电压
采样器
电机
仿真器
功率
变换器
电流
控制器
U
PWM
U
abc
i
ref
i
abc
被试
驱动器
G
1 -6
Fig
ure 1. Simplified diagram of m
otor
simulator
图
1.
电机模拟器的简化结构图
Copyright © 201
3 Hanspub
78
功率型半实物仿真系统中高频脉波电压的实时采样
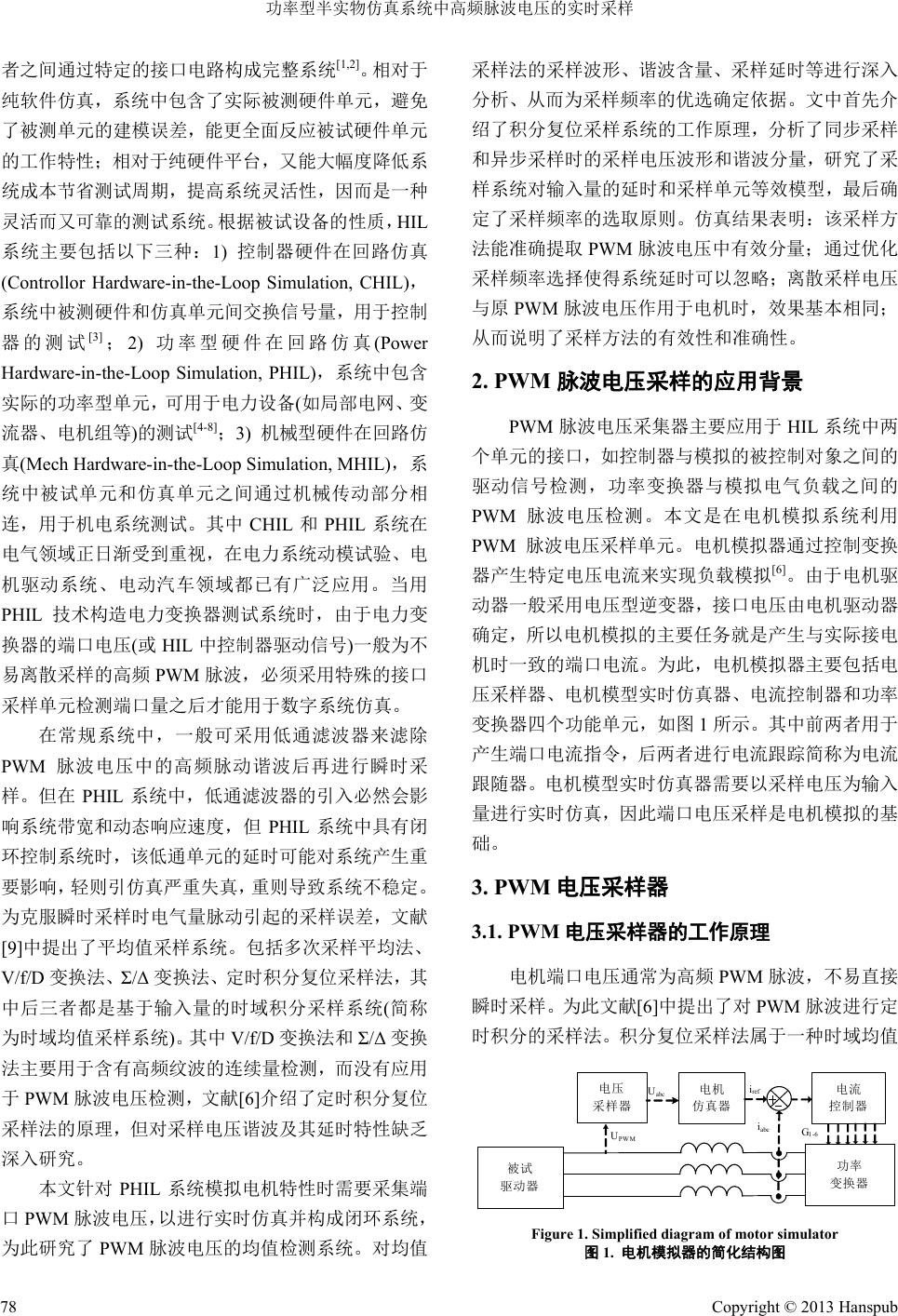
采样系统,其对端口电压
进行时域积分并
离散采样求
其时域平均值,从而提取电压中的等效作用量
,可视
为
PWM
调制的逆变换。根据冲量等效原理可知,尽
管原电压和采样电压波形不同,但当两者分别作用于
惯性系统时作用效果相同。图
2
为上述方法的
工作原
理及其
波形
。
根据上述分析,第
k
个时刻的采样电压值:
1
d
c
c
kT
st
kT
ck
C
Ut
U
T
(1)
式中
U
c
(
k
)
为第
k
个采样值,
T
c
为采样周期,
U
s
(
t
)
为瞬
时输入
电压
值。
当输入为
峰值
U
dc
,占空比
D
的高频
PWM
脉波
时,假设采样周期
T
c
和
PWM
周期
T
s
存在关系
T
c
=
m
∙
n
T
s
。由于积分区间段随机分布,采样电压可能存在波
动。此时电压采样最大和最小值分别为:
max
min
min 0,
max 0,01
ss
s
c dc
c
ss
c dc
c
mDTnT DT
UU
T
mDTDn T
UU
T
(2)
根据式
(2)
可知,即使输入恒
占空比
PWM
脉波,
采样电压也不一定等于调制量,而是
在一定范围内波
动,波动范围与占空比
D
相关,与
T
c
/
T
s
相关。当
0 <
D
< 1
时,当且仅当采样与
PWM
调制同步时
(
即
T
c
/
T
s
=
m
)
,采样值才维持恒定等于原调制电压。
cdc r
U DUU
(3)
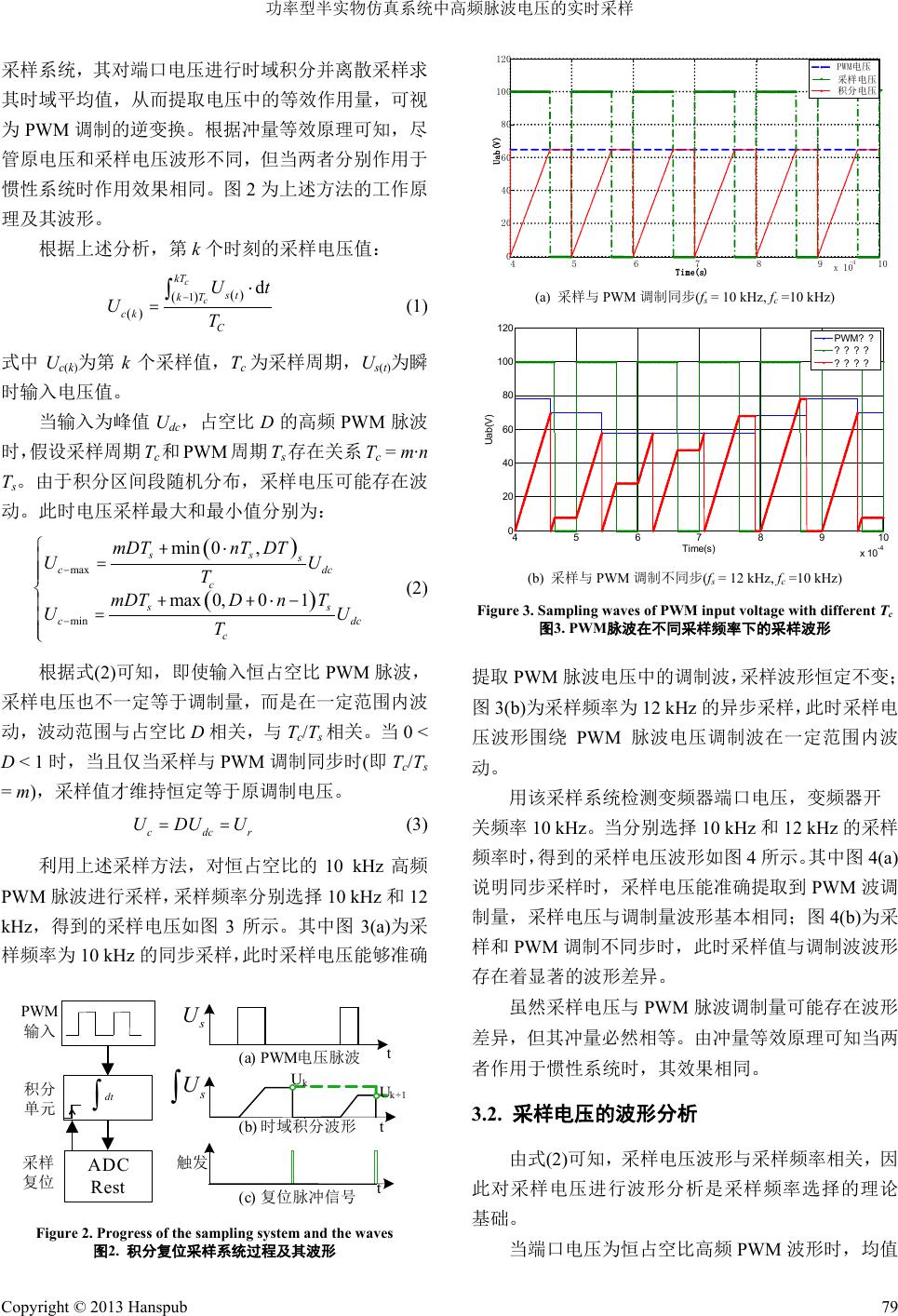
利用上述采样方法,对恒占空比的
10
kHz
高频
PWM
脉波进行采样,采样频率分别选择
10
kHz
和
12
kHz
,得到的采样电
压如图
3
所示。其中图
3(
a)
为采
样频率为
10
kHz
的同步采样,此时采样电压能够准确
( a
)
PWM
电压脉波
(
b
)
时域积分波形
(
c
)
复位脉冲信号
ADC
Re st
dt
∫
PWM
输入
采样
复位
积分
单元
U
k
U
k+1
t
触发
s
U
∫
s
U
t
t
Fig
ure 2. Progress of the sampling system and the waves
图
2.
积分复位采样系统过程及其波形
4
5
6
7
8
9
10
x
10
-4
0
20
40
60
80
100
120
Time
(s)
Ua b (V)
PWM
电压
采样电压
积分电压
(a)
采样与
PWM
调制同步
(
f
s
= 10 kHz,
f
c
=10 kHz)
4
5
6 7
89
10
x 10
-4
0
20
40
60
80
100
120
Time(s)
Uab(V)
PWM? ?
????
????
(b)
采样与
PWM
调制不同步
(
f
s
= 12 kHz,
f
c
=10 kHz)
Fig
ure 3. Sampling
waves of
PWM
input
voltage
with different
T
c
图
3. PWM
脉波
在不同
采样频率下的采样波形
提取
PWM
脉波电压中的调制波,采样波形恒定
不变;
图
3(b)
为采样频率为
12
kHz
的异步采样,此时采样电
压波形围绕
PWM
脉波电压调制波在一定范围内波
动。
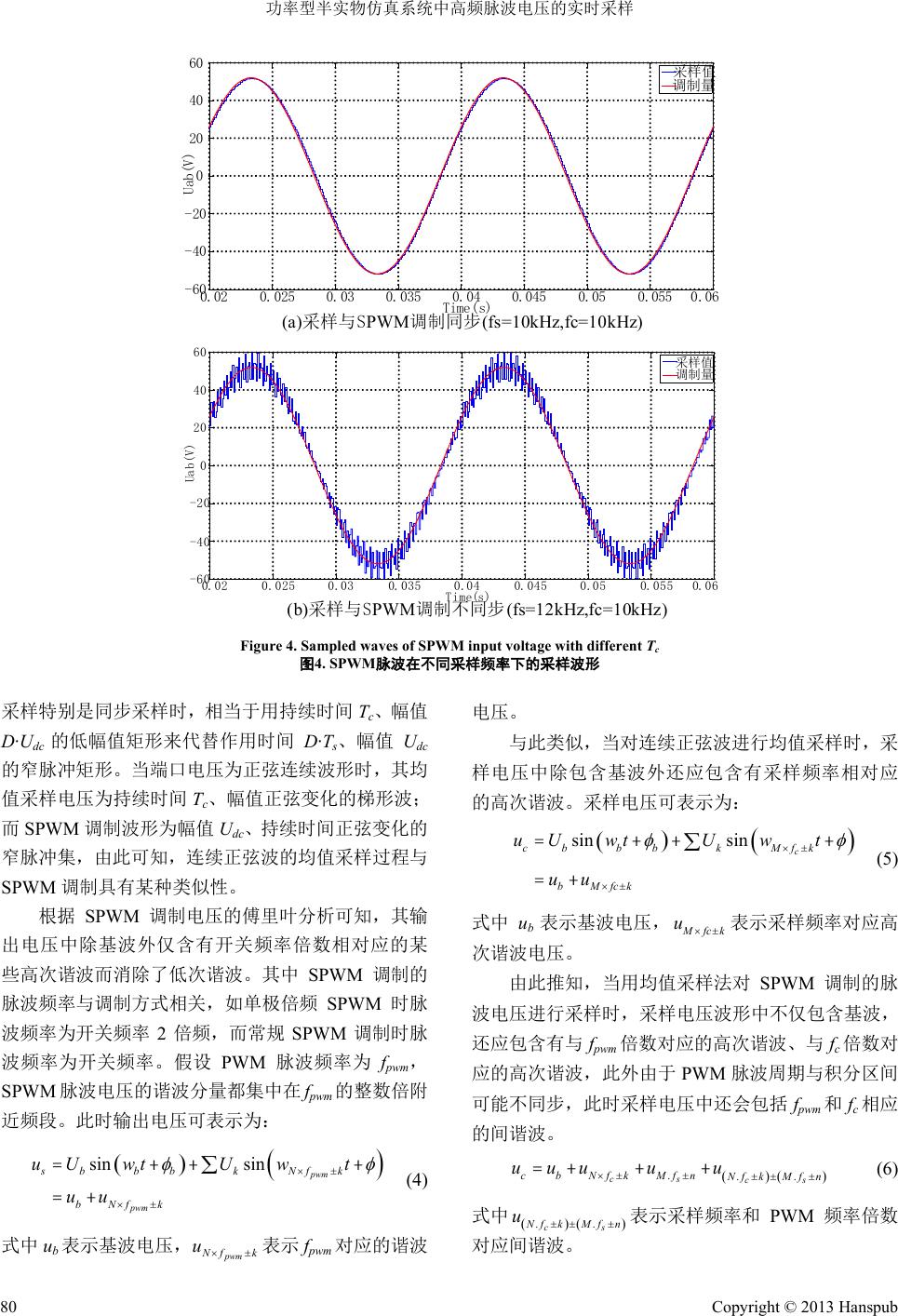
用该采样系统检测变频器端口电压,变频器开
关频率
10
kHz
。当分别选择
10
kHz
和
12
kHz
的采样
频率时,得到的采样电压波形如图
4
所示。其中图
4(a)
说明同步采样时,采样电压能准确提取到
PWM
波调
制量,采样电压与调制量波形基本相同;图
4
(b)
为采
样和
PWM
调制不同步时,此时采样值与调制波波形
存在着显著的波形差异。
虽然采样电压与
PWM
脉波
调制量可能存在波形
差异,但其冲量必然相等。由冲量等效原理可知当两
者作用于惯性系统时,其效果相同。
3
.2.
采样电压的波形分析
由式
(2)
可知,采样电压波形与采样频率相关,因
此对采样电压进行波形分析是采样频率选择的理论
基础。
当端口电压为恒占空比
高频
PWM
波形时,均值
Copyright © 201
3 Hanspub
79
功率型半实物仿真系统中高频脉波电压的实时采样
(
a
)
采样与
S
PWM
调制同步
(fs
=
10
k Hz
,
fc
=
10
kHz
)
0
.
02
0
.
025
0.
03
0.
035
0
.
04
0
.
045
0.
05
0.
055
0.
06
-
60
-
40
-
20
0
20
40
60
Time
(
s
)
Uab(V)
采样值
调制量
(b)
采样与
S
PWM
调制不同步
(
fs
=
12
k Hz,fc
=10
kHz)
0.
02
0.
025
0.
03
0.
035
0.
04
0.
045
0.
05
0
.
055
0.
06
-60
-40
-20
0
20
40
60
Time
(s)
Uab(V)
采样值
调制量
Figu
re 4. Sampled
waves
of S
PWM
input
voltage
with different
T
c
图
4. S
PWM
脉波在不同采样频率下的采样波形
采样特别是同步采样时,相当于用持续时间
T
c
、幅值
D
∙
U
dc
的低幅值矩形来代替作用时间
D
∙
T
s
、幅值
U
dc
的窄脉冲矩形。当端口电压为正弦连续波形时,其均
值采样电压为持续时间
T
c
、幅值正弦变化的梯形波;
而
S
PWM
调制波形为幅值
U
dc
、持续时间正弦变化的
窄脉冲集,由此可知,连续正弦波的均值采样过程与
S
PWM
调制具有某种类似性。
根据
S
PWM
调制电压的傅里叶分析可知,其输
出电压中除基波外仅含有开关频率倍数相对应的某
些高次谐波而消除了低次谐波
。其中
S
PWM
调制的
脉波频率与调制方式相关,如单极倍频
S
PWM
时脉
波频率为开关频率
2
倍频,而常规
S
PWM
调制时脉
波频率为开关频率。假设
PWM
脉波频率为
f
pwm
,
S
PWM
脉波电压的谐波分量都集中在
f
pwm
的整数倍附
近频段。此时输出电压可表示为:
sinsin
pwm
pwm
sbbbkNf k
b Nfk
u UwtUwt
uu
φφ
(4)
式中
u
b
表示基波电压,
pwm
Nf k
u
表示
f
pwm
对应的谐波
电压。
与此类似,当对连续正弦波进行均值采样时,采
样电压中除包含基波外还应包含有采样频率相对应
的高次谐波。采样电压可表示为:
sinsin
c
cbbbkMf k
bMfc k
u UwtUwt
uu
φφ
(5)
式中
u
b
表示基波电压,
Mfc k
u
表示采样频率对应高
次谐波电压。
由此推知,当用均值采样法对
S
PWM
调制的脉
波电压进行采样时,采样电压波形中不仅包含基波,
还应包含有与
f
pwm
倍数对应的高次谐波、与
f
c
倍数对
应的高次谐波,此外由于
PWM
脉波周期与积分区间
可能不同步,此时采样电压中还会包括
f
pwm
和
f
c
相应
的间谐波。
.
..
cs
cs
cbNfkMfn
Nf kMf n
u uuuu
(6)
式中
..
cs
Nf kMf n
u
表示采样频率和
PWM
频率倍数
对应间谐波。
Copyright © 201
3 Hanspub
80
功率型半实物仿真系统中高频脉波电压的实时采样
式中各谐波分量的大小不仅与调制比
m
相关,与
f
pwm
、
f
c
相关,与
M
和
N
的大小相关,而且还与采样
系统在
PWM
波形中的积分时刻相关。其中谐波中含
量较大的部分主要集中较低频段,各频段谐波大致上
呈现随频率增高而快速衰减的趋势。
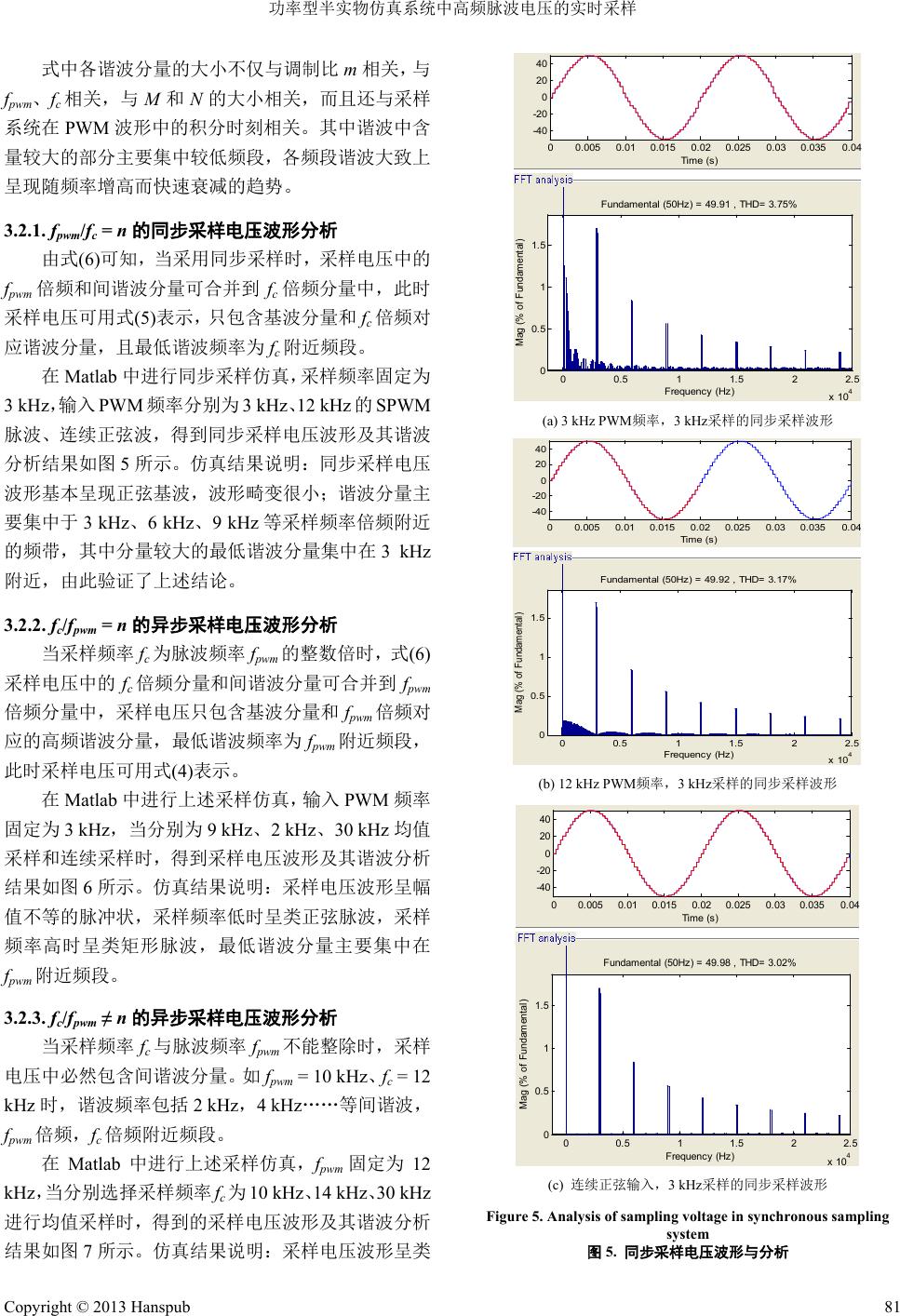
3
.2.1
.
f
pwm
/
f
c
=
n
的同步采样电压波形分析
由式
(6)
可知,当采用同步采样时,采样电压中的
f
pwm
倍频和间谐波分量可合并到
f
c
倍频分量中,此时
采样电压可用式
(5)
表示,只包含基波分量和
f
c
倍频对
应谐波分量,且最低谐波频率为
f
c
附近频段。
在
Matl
ab
中进行同步采样仿真,采样频率固定为
3
kHz
,输 入
PWM
频率分别为
3
kHz
、
12
kHz
的
S
PWM
脉波、连续正弦波,得到同步采样电压波形及其谐波
分析结果
如图
5
所示。仿真结果说明:同步采样电压
波形基本呈现正弦基波,波形畸变很小;谐波分量主
要集中于
3
kHz
、
6
kHz
、
9
kHz
等采样频率倍频附近
的频带,其中分量较大的最低谐波分量集中在
3
kHz
附近,由此验证了上述结论。
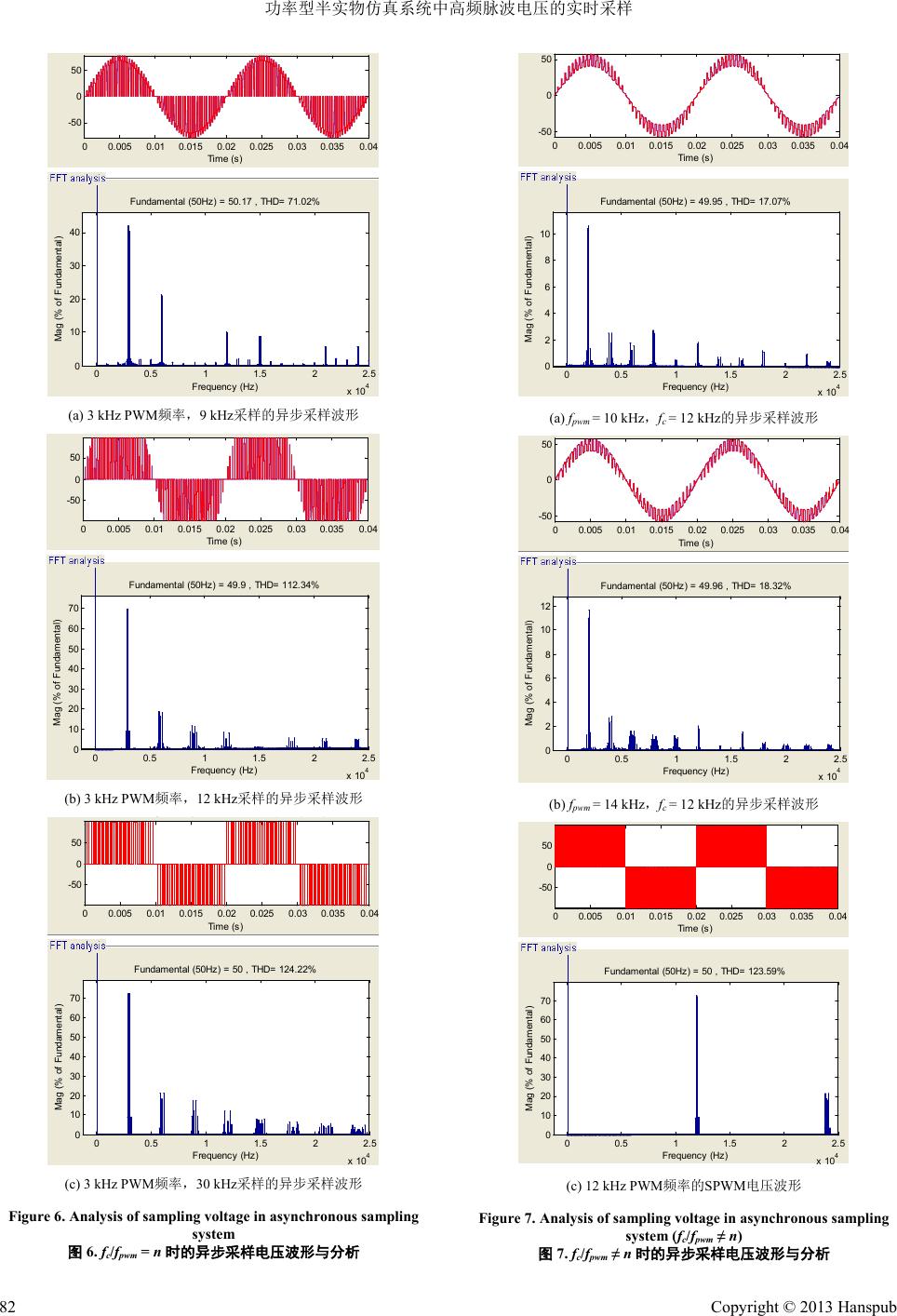
3
.2.2
.
f
c
/
f
pwm
=
n
的异步采样电压波形分析
当采样频率
f
c
为脉波频率
f
pwm
的整数倍时,式
(6)
采样电压中的
f
c
倍频分量和间谐波分量可合并到
f
pwm
倍频分量中,采样电压只包含基波分量和
f
pwm
倍频对
应的高频谐波分量,最低谐波频率为
f
pwm
附近频段,
此时采样电压可用式
(4)
表示。
在
Matlab
中进行上述采样仿真,输入
PWM
频率
固定为
3
kHz
,当分别为
9
kHz
、
2
kHz
、
30
kHz
均值
采样和连续采样时,得到采样电压波形及其谐波分析
结果如图
6
所示。仿真结果说明:采样电压波形呈幅
值不等的脉冲状,采样频率低时呈类正弦脉波,采样
频率
高时呈类矩形脉波,最低谐波分量主要集中在
f
pwm
附近频段。
3
.2.3
.
f
c
/
f
pwm
≠
n
的异步采样电压波形分析
当采样频率
f
c
与脉波频率
f
pwm
不能整除时,采样
电压中必然包含间谐波分量。如
f
pwm
=
10
kHz
、
f
c
= 12
kHz
时,谐波频率包括
2
kHz
,
4
kHz
……等间谐波,
f
pwm
倍频,
f
c
倍频附近频段。
在
Matlab
中进行上述采样仿真,
f
pwm
固定为
12
kHz
,当分别选择采样频率
f
c
为
10
kHz
、
14
kHz
、
30 kHz
进行均值采样时,得到的采样电压波形及其谐波分析
结果如图
7
所示。仿真结果说明:采样电压波形呈类
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-40
-20
0
20
40
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
0.5
1
1.5
Frequency (Hz)
Fundamental (50Hz) = 49.91 , THD= 3.75%
Mag (% of Fundamental)
(a)
3
kHz PWM
频率,
3
kHz
采样的同步采样波形
0
0.0050.01
0.015
0.02 0.025
0.03
0.035 0.04
-40
-20
0
20
40
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
0.5
1
1.5
Frequency (Hz)
Fundamental (50Hz) = 49.92 , THD= 3.17%
Mag (% of Fundamental)
(b)
12
kHz PWM
频率,
3
kHz
采样的同步采样波形
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-40
-20
0
20
40
g y ( ) y
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
0. 5
1
1. 5
Frequency (Hz)
Fundamental (50Hz) = 49.98 , THD= 3.02%
Mag (% of Fundamental)
(c)
连续正弦输入,
3
kHz
采样的同步采样波形
Fig
ure 5. Analysis of sampling voltage in synchronous sampling
system
图
5
.
同步采样电压波形与分析
Copyright © 201
3 Hanspub
81
功率型半实物仿真系统中高频脉波电压的实时采样
0
0.005 0.01 0.0150.02 0.0250.03 0.0350.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
10
20
30
40
Frequency (Hz)
Fundamental (50Hz) = 50.17 , THD= 71.02%
Mag (% of Fundamental)
(a)
3
kHz PWM
频率,
9
kHz
采样的异步采样波形
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
10
20
30
40
50
60
70
Frequency (Hz)
Fundamental (50Hz) = 49.9 , THD= 112.34%
Mag (% of Fundamental)
(b) 3
kHz PWM
频率,
12
kHz
采样的异步采样波形
0
0.005 0.010.015 0.02 0.025 0.030.0350.04
-50
0
50
g y ( ) y
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
10
20
30
40
50
60
70
Frequency (Hz)
Fundamental (50Hz) = 50 , THD= 124.22%
Mag (% of Fundamental)
(c) 3
kHz PWM
频率,
30
kHz
采样的异步采样波形
Fig
ure 6. Analysis of s
ampling voltage
in
as
ynchronous sampling
system
图
6.
f
c
/
f
pwm
=
n
时的
异步采样电压波形与分析
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2. 5
x 10
4
0
2
4
6
8
10
Frequency (Hz)
Fundamental (50Hz) = 49.95 , THD= 17.07%
Mag (% of Fundamental)
(a)
f
pwm
= 10 kHz
,
f
c
= 12 kHz
的异步采样波形
0
0.005 0.010.015 0.020.025 0.03
0.035 0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
2
4
6
8
10
12
Frequency (Hz)
Fundamental (50Hz) = 49.96 , THD= 18.32%
Mag (% of Fundamental)
(b)
f
pwm
= 14 kHz
,
f
c
= 12 kHz
的异步采样波形
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
10
20
30
40
50
60
70
Frequency (Hz)
Fundamental (50Hz) = 50 , THD= 123.59%
Mag (% of Fundamental)
(c)
12 kHz PWM
频率的
SPWM
电压波形
Fig
ure 7
.
Analysis of sampling voltage in
as
ynchronous sampling
system
(
f
c
/
f
pwm
≠
n
)
图
7.
f
c
/
f
pwm
≠
n
时的异步采样电压波形与分析
Copyright © 201
3 Hanspub
82
功率型半实物仿真系统中高频脉波电压的实时采样
正弦脉波但又含有高次纹波。谐波主要集中在间谐波
及
f
pwm
倍频,
f
c
倍频附近频段;其中
f
pwm
倍频段谐波
含量大大削弱,
f
c
倍频段谐波也较小,但低频间谐波
却非常显著。
3
.3.
积分采样单元的延时特性
由均值采样系统会引入采样频率倍频和间谐波
分量可知,均值采样系统严格意义上不是线性系统。
但为简化系统分析,可用线性系统来近似等效,为此
首先分析将采样系统应用于低频连续系统。
3
.3.1
.
输入电压波形连续
根据式
(1)
,当输入电压为直线时,
k
时刻采样电
压
U
k
应为
(
k
−
1)
T
c
时刻与
k
·
T
c
时刻间线段的中点。而
根据均值采样系统的定义,
k
时刻采样电压
U
k
是前一
个周期内的平均值,因此在利用该采样电压进行实时
仿真时,应将其作为采样时刻前一个周期内的平均电
压而非采样点的瞬时电压,即需把此采样电压前推一
个周期,由此得到的采样电压波形为如图
8
( a)
所示的
实线,其等效基波与输入电压完全重合。这与
零阶保
持器的作用效果相似,但由于零阶保持器相当于是滞
后半拍,而采样电压前推相当于是超前半拍,两者相
互抵消,而不会产生任何延时。因此当均值采样系统
作用于在采样间隔内呈直线或者缓慢变化的波形
(
如
低频正弦波
)
时,其采样电压的等效值与输入连续波形
完全等效,采样电压准确且无延时。
根据香农采样定理,离散采样系统的输入频率必
须满足:
f
s
<
f
c
/2
,均此时值采样方法才对连续输入量
实现无延时无衰减的理想采样。
3
.3.2
.
输入电压为高频
PWM
脉波
上节中的分析主要针对输入波形连续,但实际上本文
均值采样系统主要针对高频
PWM
脉波。如果是对
S
PWM
脉波进行同步采样,由于积分过程相当于用作
用时间为
T
c
、幅值呈正弦波分布的阶梯波替代了作用
时间呈正弦波分布、幅值恒定的
S
PWM
脉波。此时
可将输入
S
PWM
波形电压分解为基波和高频谐波,
其中均值采样对基波分量无延时采样;而由于均值采
样法仅在采样时刻才采样,对采样周期内的高频变化
来不及响应,高于采样频率的脉波被大大削弱甚至消
除。因此对基波频率远小于采样频率的标准
S
PWM
波
形,同步采样不仅对低频率采样可以实现无延时采
样,而且还会大大削弱高次谐
波 。图
9
为对
S
PWM
脉
波进行同步均值采样的电压波形,证实了此时采样无
延时。
与所有的离散采样系统一样,均值采样方法作为
离散采样系统,对频率不满足相同香农采样定理的输
入量无法做到准确采样。而且由于离散采样过程是对
U
k
U
sam
U
k+1
U
k + 2
k? T
c
k+1
?T
c
k+2
?T
c
U
k
U
k+1
U
k+2
(a)
线性输入的均值采样过程及采样波形示意图
1 T
c
0
20
40
60
80
100
120
2 T
c
3 T
c
4 T
c
5 T
c
6T
c
7 T
c
8T
c
9 T
c
10
T
c
U
1
U
2
U
3
U
4
U
5
U
6
U
7
U
8
U
9
U
10
(b)
正弦输入的均值采样过程及采样波形示意图
Fig
ure 8. Sampled voltage waves of continuous input
图
8.
输入连续时的均值采样电压波形
2.12.2 2.32.4
2.5 2.6 2.72.82.9
3
0
0.2
0.4
0.6
0.8
1
1.2
2.0
Fig
ure 9. Sampled volt
age waves of
SPWM input
图
9. S
PWM
输入电压的均值采样波形
Copyright © 201
3 Hanspub
83
功率型半实物仿真系统中高频脉波电压的实时采样
整个采样周期进行积分,仅在采样时刻才响应,采样
周期内的高频变化相互抵消,高频量被削弱甚至消
除。因此均值采样方法的采样频率越低,其允许通过
的频段就越窄,采样响应速度就越慢,整个系统带宽
就越低。
综上所述可知,均值采样系统对远低于采样频率
的输入量可以实现无延时的理想采样,而不会带来延
时;对高于采样频率的分量又能大幅度削弱甚至完全
滤除,具有低通滤波特性。而当输入为高频
PWM
脉
波时,可将其分解为低频等效量和高频谐波分量,其
中对低频率基波采样过程无延时,对高于采样频率的
高频分量能大幅度削弱,虽然可能带来低频间谐波,
但通过采样频率的选配可以削弱甚至规避间谐波的
产生,而且采样系统后一般接有带宽较低的低通惯性
系统。因此积分采样单元仍可视为截止频率为
f
c
/2
的
无延时无衰减理想低通单元。
4.
采样频率的选取原则
根据前述采样电压波形和延时分析可知,采样频
率会影响采样波形产生谐波分量、引起采样延时、滤
除高频谐波、影响动态响应速度,因此采样频率的选
择必须慎重。由于积分采样是离散采样,采样频率
f
c
越高,响应越快,越接近连续系统,但此时要求复位
和
A
DC
单元具有更快的响应速度,硬件实现难度越
大;而
f
c
较低时,其采样带宽有限,动态响应慢,且
带来的
f
c
倍频段谐波和间谐波分量更明显,尤其是当
f
c
远低于
f
pwm
的异步采样时,此时采样单元会引入了
大量的
f
c
倍频相应谐波和间谐波,不但影响系统动态
响应速度,而且所带入的间谐波频段更低、含量更大,
对系统不利影响更严重。
因此采样频率的选择应根据硬件实现难度和采
样性能要求来折中选择:
1)
当
AD
转换和复位硬件电路动态响应速度允
许的采样频率远高于开关频率时,可选择尽可能高的
开关频率以提高响应速度,且尽可能选择采样频率为
PWM
脉波频率整数倍,以较少附加低次谐波。
2)
当允许采样频率与开关频率相当时,应优先选
择采样频率等于开关频率的同步采样系统以减小间
谐波分量。
3)
当允许采样频率明显低于开关频率时,应选择
尽可能大且可被开关频率整除的采样频率以实现同
步采样,以同时减小开关频率倍数谐波和减小间谐波。
5.
均值采样系统仿真及验证
为验证均值采样系统和采样频率选择原则的有
效性,本文在
Matlab
中搭建了基于积分复位采样系统
的仿真模型。其中积分单元采用
Simulink
中带复位的
积分器,
AD
采样和复位
单元由
C_Function
通过定时
中断来实现,仿真系统结构图如
10
所
示。
5
.1.
采样波形及谐波分析验证
根据
S
PWM
脉波频率与采样频率之间的关系,
本文建立了
f
c
远大于
f
pwm
、
f
c
与
f
pwm
相当、
f
c
远小于
f
pwm
三组仿真对比系统。
5.2.
采样频率远大于
S
PWM
频率
假设
输入
S
PWM
电压的
f
pwm
固定为
3
kHz
,分别
建立采样频率为
8
kHz
、
9
kHz
、
10
kHz
的均值采样系
统,得到的采样电压波形及其谐波如图
11
所示。
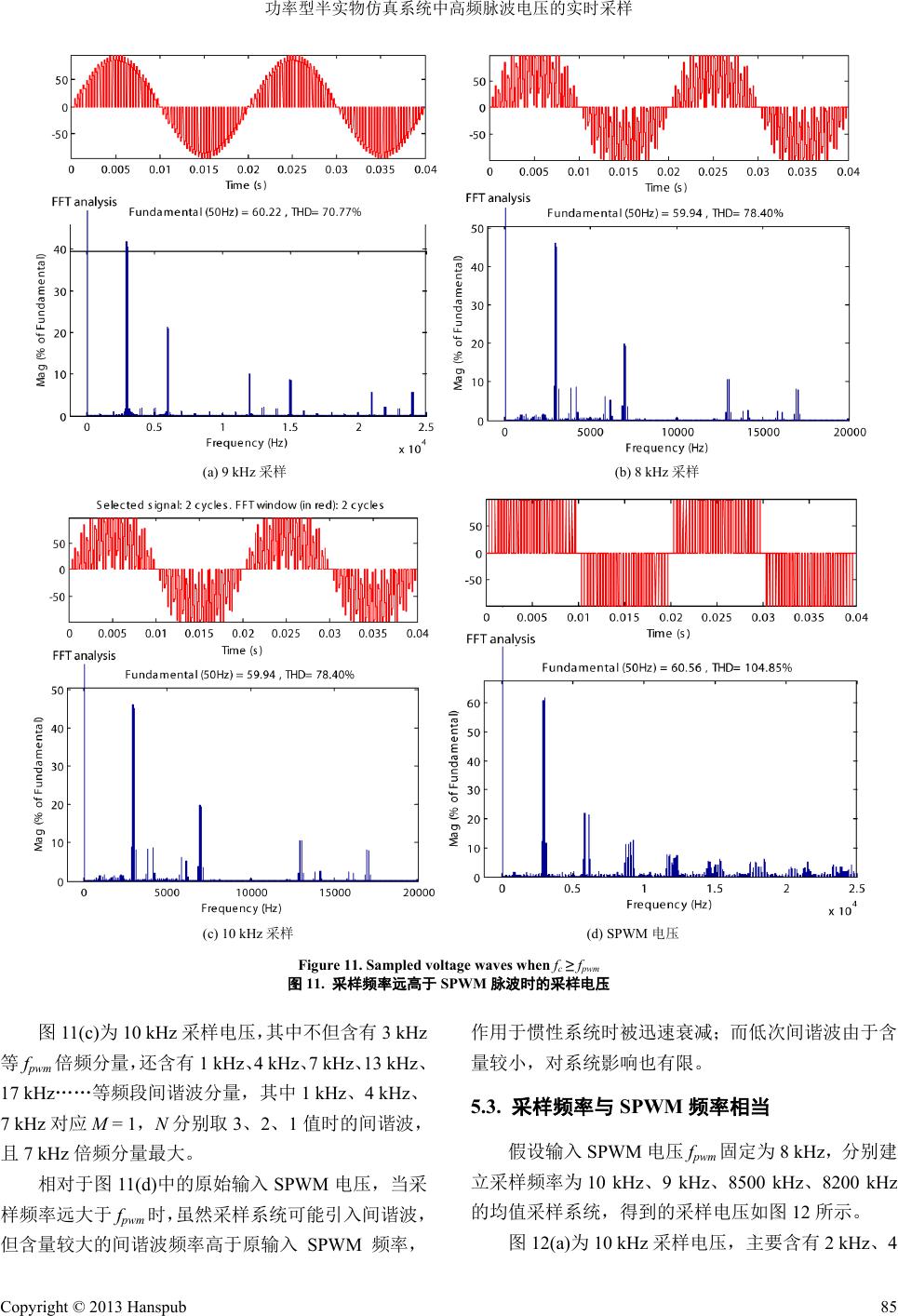
图
11(a )
为
9 kHz
采样电压波形,其中主要包括
3
kHz
、
6 kHz
等
f
pwm
倍频分量,而无低次谐波分量。
图
11(b)
为
8 kHz
采样电
压,既含有
3
kHz
、
6
kHz
等
f
pwm
倍频分量,还含有
1
kHz
、
2
kHz
、
5
kHz
、
11
kHz
、
13
kHz
等间谐波分量。其中
2
kHz
、
5
kHz
、
11
kHz
对应公式
(6)
中
M
= 1
,
N
分别取
2
、
1
、
−
1
时的间谐波,
由于
5 kHz
的
N
取值最小,故
5 kHz
倍频分量更明显;
而
1
kHz
和
13
kHz
对应
N
和
M
取其他数值时的间谐
波。
C Function
复位脉冲
U
k
输入
SPWM
电压
AD
及
复位单元
带复位
的积分器
dt
∫
系统输出
或实时仿真
定时采样
模型计算
及输出
Fig
ure 10. Simplified diagram of sampling and RTDS System
图
10
.
积分采样器的系统结构图
Copyright © 201
3 Hanspub
84
功率型半实物仿真系统中高频脉波电压的实时采样
(a)
9
kHz
采样
(b)
8
kHz
采样
(c)
10
kHz
采样
(d)
SPWM
电压
Fig
ure
11
. Sampled voltage waves when
f
c
≥
f
pwm
图
11
.
采样频率远高于
S
PWM
脉波时的采样电压
图
11(c)
为
10
kHz
采样电压,其中不但含有
3
kHz
等
f
pwm
倍频分量,还含有
1
kHz
、
4
kHz
、
7
kHz
、
13
kHz
、
17
kHz
……等频段间谐波分量,其中
1
kHz
、
4
kHz
、
7
kHz
对应
M
= 1
,
N
分别取
3
、
2
、
1
值时的间谐波,
且
7
kHz
倍频分量最大。
相对于图
11(d)
中的原始输入
S
PWM
电压,当采
样频率远大于
f
pwm
时,虽然采样系统可能引入间谐波,
但含量较大的间谐波频率高于原输入
S
PWM
频率,
作用于惯性系统时被迅速衰减;而低次间谐波由于含
量较小,对系统影响也有限。
5.3.
采样频率与
S
PWM
频率相当
假设输入
S
PWM
电压
f
pwm
固定为
8
kHz
,分别建
立采样频率为
10
kHz
、
9
kHz
、
85
00
kHz
、
8
200
kHz
的均值采样系统,得到的采样电压如图
12
所示。
图
12(a)
为
10
kHz
采样电压,主要含有
2
kHz
、
4
Copyright © 201
3 Hanspub
85
功率型半实物仿真系统中高频脉波电压的实时采样
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
5
10
15
Frequency (Hz)
Fundamental (50Hz) = 59.93 , THD= 21.75%
Mag (% of Fundamental)
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
2
4
6
8
Frequency (Hz)
Fundamental (50Hz) = 60.04 , THD= 12.13%
Mag (% of Fundamental)
(a)
10
kHz
采样
(b) 9 kHz
采样
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
0.5
1
1.5
2
2.5
x 10
4
0
2
4
6
8
Frequency (Hz)
Fundamental (50Hz) = 60.04 , THD= 12.13%
Mag (% of Fundamental)
0
0.0050.01
0.015 0.020.025
0.03 0.035
0.04
-50
0
50
Time (s)
0
2000 4000 6000
8000 10000
0
0.5
1
1.5
Frequency (Hz)
Fundamental (50Hz) = 60.01 , THD= 2.70%
Mag (% of Fundamental)
(c)
8500
kHz
采样
(d)
8200
kHz
采样
Fig
ure
12
. Sampled voltage waves when
f
c
≈
f
pwm
图
12
.
采样频率与
S
PWM
脉波频率接近时的采样电压
kHz
等间谐波分量,其中
2
kHz
为最低间谐波段,含
量也最大;图
12(b)
为
9
kHz
采样电压,含有
1
kHz
、
2
kHz
等间谐波,最低谐波段为
1
kHz
;图
12(c)
为
8.5
kHz
采样电压,含有
500
Hz
、
1
kHz
等间谐波,最低
谐波段为
500
Hz
;图
12(d)
为
8.
2
kHz
采样时的电压,
含有
2
00
Hz
、
4
kHz
等间谐波,最低谐波段为
2
00
Hz
。
随着采样频率接近
f
pwm
,采样电压波形更正弦,间谐
波频率更低但含量快速减小。因此为改善采样波形,
最好选择
f
c
等于
f
pwm
的同步采样,即便
f
c
不能做到与
f
pwm
严格一致,当两者差异很小时,间谐波含量也很
小基本可以忽略。
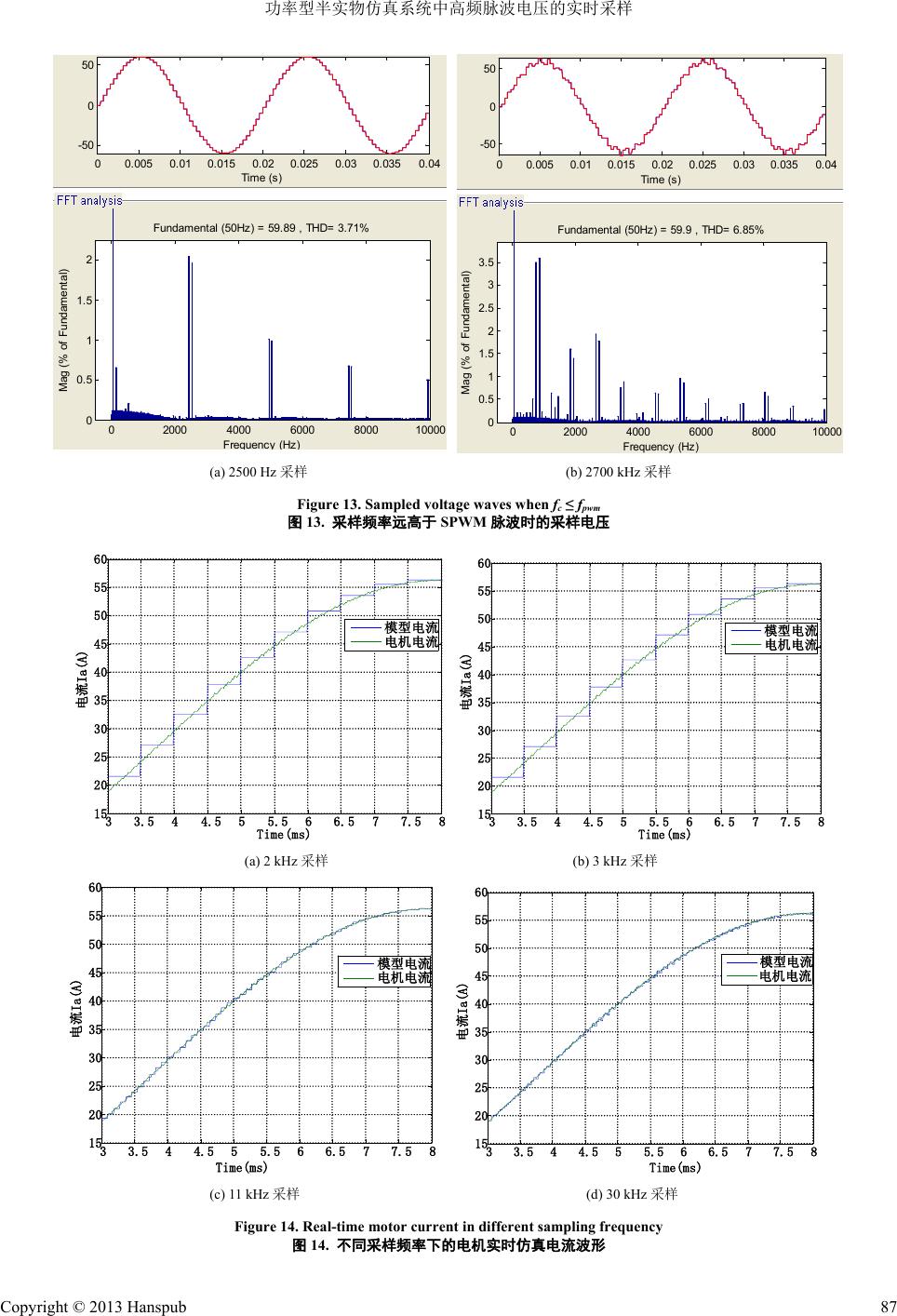
5.4.
采样频率远小于
S
PWM
频率
假设
f
pwm
为
10
kHz
,分别建立
f
s
为
2500
Hz
的同
步采样和
2700
Hz
的异步采样系统,得到的采样电压
如图
13
所 示。图
为
f
s
为
2500
Hz
同步采样时,电压波
形正弦但引入了少量
f
s
倍频谐波;而异步采样不仅引
入
f
s
倍频谐波,还引入大量的低次谐波,采样效果要
Copyright © 201
3 Hanspub
86
功率型半实物仿真系统中高频脉波电压的实时采样
0
0.005 0.010.015 0.020.025
0.03
0.035
0.04
-50
0
50
Time (s)
0
2000
4000
6000
8000 10000
0
0.5
1
1.5
2
Frequency (Hz)
Fundamental (50Hz) = 59.89 , THD= 3.71%
Mag (% of Fundamental)
0
0.005
0.01
0.015
0.02
0.0250.03 0.035
0.04
-50
0
50
Time (s)
0
2000
4000
60008000 10000
0
0.5
1
1.5
2
2.5
3
3.5
Frequency (Hz)
Fundamental (50Hz) = 59.9 , THD= 6.85%
Mag (% of Fundamental)
(a)
2500
Hz
采样
(b)
2700
kHz
采样
Fig
ure
13
. Sampled voltage waves when
f
c
≤
f
pwm
图
13
.
采样频率远高于
S
PWM
脉波时的采样电压
Time (ms
)
33.5 44.5 55.5 66.5
77.5 8
15
20
25
30
35
40
45
50
55
60
电流
Ia(A)
模型电流
电机电流
Time (ms
)
33.5 44.5 55.5 66.577.5 8
15
20
25
30
35
40
45
50
55
60
电流
Ia(A)
模型电流
电机电流
(a)
2 k
Hz
采样
(b) 3 kHz
采样
33.5
44.5 55.5 66.577.58
15
20
25
30
35
40
45
50
55
60
电 流
Ia(A)
模型电流
电机电流
Time(ms
)
33.5 44.5 55.5
66.577.5 8
15
20
25
30
35
40
45
50
55
60
电 流
Ia(A)
模型电流
电机电流
Time(ms
)
(c)
11
kHz
采样
(d)
30
kHz
采样
Fig
ure 14. R
eal-
time motor current in different sampling frequency
图
14.
不同采样频率下的电机实时仿真电流波形
Copyright © 201
3 Hanspub
87
功率型半实物仿真系统中高频脉波电压的实时采样
比同步采样系统差很多。
5.5
.
采样系统延时特性验证
为了检验采样频率对系统输入电压的延时效应,
固定
f
pwm
为
10
kHz
,分别建立了
f
c
为
2
kHz
、
3
kHz
、
11
kHz
、
30
kHz
的采样系统。由于采样电压波形差异
很大,不易直接比较,本文将采样电压作用于电机模
型上,然后对比各采样频率下的实时仿真电机电枢电
流,并与
S
PWM
电压直接作用于电机时的电流进行
对比,得
到图
14
所
示的各采样频率下的
实时仿真电
机
a
相电流波形。
根据之前的分析可知在上述采样频率的采样系
统中,采样电压波形差异很大。但图
14
说明当这些
电压作用于电机系统时,但其等效量与都与实际电机
的电流重合,基本没有延时。由此证明了均值采样系
统能够准确提取
S
PWM
电压有效量,用于半实物仿
真系统时可有效解决电压测量接口问题且不会带来
低频延时。
6.
结论
针对
PHIL
系统中需采集端口
PWM
脉波电压以
进行实时数字仿真的要求,研究了基于时域积分的
PWM
脉波电压均值采样方法,分析了采样波形与采
样频率的关系,研究了采样系统延时及其等效模型,
确定了采样频率的选取原则。
理论分析仿真结果表明:该采样方法能准确提取
PWM
脉波电压中的等效分量;采样频率都会影响采
样电压波形并引入谐波分量,通过优选采样频率能最
大限度的减少谐波量获得更好的采样效果;当将采样
电压作用于惯性系统时,效果基本相同;从而说明了
采样方法的有效性和准确性。
参考文献
(References)
[1]
卢子广
,
柴建云
,
王祥珩等
.
电力驱动系统实时控制虚拟实验
平台
[
J].
中国电机工程学报
, 2003,
23(4): 119
-
123.
[2]
郭希铮
,
游小杰
,
徐从谦等
.
大功率电力牵引控制系统硬件在
回路实时仿真
[
J].
电工技术学报
, 2012,
27(4): 65
-
70.
[3]
S. C. Oh
.
Evaluation of motor characteristics for hybrid electric
vehicles using the hardware
-in-the-
loop concept
.
IEEE Transa
c-
tions on
Vehicular Technology,
2005, 54
(3):
817
-
824.
[4]
W. Ren, M. Steurer
and T. L. Baldwin
.
Imp
rove the stability of
power hardware
-in-the-
loop simulation by selecting appropriate
interface algorithm. IEEE Transactions on Industry Applications,
2008, 44
(4):
1286
-
1294.
[5]
W. Ren, M. Steurer
and T. Baldwin
.
An effective method for
evaluating the accuracy
of power hardware
-in-the-
loop simul
a-
tions.
IEEE Transactions on Industry Applications
,
2009, 45
(4):
1484
-
1490.
[6]
H. J. Slater, D. J. Atkinson
and A. G. Jack
.
Real-
time emulation
for power e
quipment development
—
Part II: The virtual m
achine.
IEE
E
Proc
eedings
of
Electric Power Applications
,
1998, 145
(3):
153
-
158.
[7]
Y. S
. Rao, M.
Chandorkar
.
Real-
time electrical load em
ulator
using optimal feedback control t
echnique.
IEEE Transactions on
Industrial Electronics
,
2010, 57
(4
):
1217
-
1225.
[8]
O.
Vodyakho, M
. Steurer
and
C.
S. Edrington.
An
induction m
a-
chine emulator for high
-
power applications utilizing a
dvanced
simulation tools with g
raphical u
ser i
nterfaces. IEEE Transa
c-
tions
on Energy Conversion
,
2012
,
27
(1
):
160
-
172
.
[9]
马小亮
.
高性能变频调速及其典 型控制 系统
[
M]
.
北京
:
机械
工业出版社
,
2010
.
Copyright © 201
3 Hanspub
88