Computer Science and Application
Vol.07 No.03(2017), Article ID:20069,6
pages
10.12677/CSA.2017.73034
Research on Measurement of Pose Parameters of Aerospace Simulator Based on Monocular-Vision System
Weirong Sun1, Long Zhang2
1Harbin Turbine Co. Ltd., Harbin Heilongjiang
2China Academy of Launch Vehicle Technology 18th Research Institute, Beijing

Received: Mar. 12th, 2017; accepted: Mar. 28th, 2017; published: Mar. 31st, 2017

ABSTRACT
This article proposed a real-time measurement method based on monocular vision system to measure the pose parameters of aerospace simulator. Several feature points were arranged on the surface of aerospace simulator and monocular camera was used to extract the images of feature points. Monocular vision coordinates measurement model and pose computation model were established to obtain the pose parameters of aerospace simulation. Finally, experiments were conducted to verify the feasibilities of applying monocular-vision method to measure the pose of aerospace simulator.
Keywords:Monocular Vision, Aerospace Simulator, Real-Time Measurement, Feature Points
采用单目视觉的航天模拟器位姿参数测量研究
孙维荣1,张龙2
1哈尔滨汽轮机厂有限责任公司,黑龙江 哈尔滨
2中国运载火箭技术研究院第十八研究所,北京
收稿日期:2017年3月12日;录用日期:2017年3月28日;发布日期:2017年3月31日

摘 要
针对航天模拟器位姿参数的测量问题,提出一种基于单目视觉系统的实时测量方法。将多个特征点布置在航天模拟器表面,利用单目相机实时提取特征点像点,并通过本文所建立的单目视觉坐标测量模型和位姿求解模型,可实现航天模拟器的位姿参数测量。最后,通过实验表明了利用单目视觉方法实现航天模拟器位姿测量的可行性。
关键词 :单目视觉,航天模拟器,实时测量,特征点

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
由于视觉测量具有非接触、精度较高、实时性好等特点,因而在运动参数测量领域具有非常广阔的应用前景 [1] [2] [3] [4] 。随着航天器空间技术的不断发展,视觉方法正在成为航天器运动参数测量的一种重要手段。文献 [5] 研究了一种基于立体视觉的姿态测量系统来改善航天器风洞实验精度,该方法采取逐点测量的方式,获得了较高的姿态测量精度。李喆等人 [6] 从视觉测量角度研究了飞行器的姿态测量方法,该方法利用了激光跟踪仪进行全局标定,通过多个相机实现飞行器姿态测量,在小角度测量范围内实现了 的测量精度。赵玉华等人 [7] 从误差补偿的角度研究了飞行器姿态的视觉测量问题,该方法在一定程度上减小了测量误差,提高了飞行器的姿态测量精度。
的测量精度。赵玉华等人 [7] 从误差补偿的角度研究了飞行器姿态的视觉测量问题,该方法在一定程度上减小了测量误差,提高了飞行器的姿态测量精度。
为了满足航天模拟器运动范围大、运动参数测量精度高及实时性好等要求,本文提出了一种利用单目视觉实现航天模拟器位姿参数实时测量的方法。
2. 位姿测量模型建立
图1所示为采用单目视觉的航天模拟器位姿参数测量系统示意图,主要包含1个相机、待测航天模拟器、多个特征点,以及控制计算机等。测量过程分为两个工作阶段,第一阶段为测量前的预处理工作阶段,该阶段需要确定航天模拟器的零位位置,即利用单目视觉测量固定在模拟器上的各个特征点在零位的位置坐标。第二阶段为实时测量阶段,该阶段步骤为:① 利用单目视觉系统实现某一时刻各特征点坐标测量;② 利用该时刻特征点坐标与零位位置的坐标关系进行模拟器位姿参数的求取。以下将建立单目视觉坐标测量模型及模拟器位姿求取模型。
2.1. 单目视觉坐标测量建模
图2所示为特征点成像关系示意图, 为相机坐标系,
为相机坐标系, 为图像物理坐标系,
为图像物理坐标系, 为图像像素坐标系。
为图像像素坐标系。 为两个特征点,在相机坐标系下的三维坐标分别记为
为两个特征点,在相机坐标系下的三维坐标分别记为 、
、 ,特征点之间的距离为
,特征点之间的距离为 ,且与光心
,且与光心 形成夹角
形成夹角 。两个特征点在图像平面上相应的像点为
。两个特征点在图像平面上相应的像点为 ,图像物理坐标分别记为
,图像物理坐标分别记为 、
、 。两个特征点与光心
。两个特征点与光心 的距离分别记为
的距离分别记为 。
。
由透视成像关系,可得
 (1)
(1)

Figure 1. Sketch of measurement system
图1. 测量系统示意图
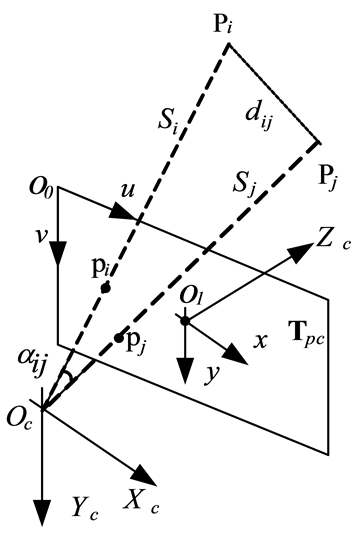
Figure 2. Image correlation of feature points
图2. 特征点成像关系示意图
其中, 为相机镜头焦距。
为相机镜头焦距。
夹角 满足:
满足:
 (2)
(2)
其中, 为单位向量,具体表达式为:
为单位向量,具体表达式为:
 (3)
(3)
相机坐标系下各个特征点的三维坐标满足:
 (4)
(4)
在已知各个特征点像点的图像坐标前提下,只要计算出相应的距离 ,根据公式(4)就可以求出空间特征点在相机坐标系下的三维坐标。
,根据公式(4)就可以求出空间特征点在相机坐标系下的三维坐标。
对 ,利用余弦定理可得:
,利用余弦定理可得:
 (5)
(5)
由于本文系统中采用5个特征点进行计算,这将获得 个关于未知距离
个关于未知距离 的二次约束方程,即
的二次约束方程,即
 (6)
(6)
利用消元法 [8] 对式(6)中的 进行求解,进而结合式(3)、(4)可获得相机坐标系下相应特征点的三维坐标。
进行求解,进而结合式(3)、(4)可获得相机坐标系下相应特征点的三维坐标。
2.2. 位姿求解模型
航天模拟器的位姿参数通常是相对世界坐标系而言,假设5个特征点在相机坐标系下的初始坐标 ,当运动某一位置时相机坐标系下的坐标
,当运动某一位置时相机坐标系下的坐标 。假设相机坐标系与世界坐标系之间的旋转矩阵为
。假设相机坐标系与世界坐标系之间的旋转矩阵为 、平移向量
、平移向量 (
( 、
、 通过相机参数标定获得)。特征点相应的世界坐标应满足:
通过相机参数标定获得)。特征点相应的世界坐标应满足:
 (7)
(7)
 (8)
(8)
其中, 为第
为第 个特征点在世界坐标系下的初始坐标;
个特征点在世界坐标系下的初始坐标;
 为第
为第 个特征点在世界坐标系下的实时坐标。
个特征点在世界坐标系下的实时坐标。

Table 1. Pose parameter measurement results of 3 positions
表1. 3个位置的位姿参数测量结果
航天模拟器运动位姿满足关系如下:
 (9)
(9)
其中, 、
、 为包含6自由度位姿的旋转平移关系,可通过Levenberg-Marquardt迭代等算法实现位姿的求解。
为包含6自由度位姿的旋转平移关系,可通过Levenberg-Marquardt迭代等算法实现位姿的求解。
3. 实验结果
实验中相机分辨率为1600*1200,镜头焦距为25.841 mm,特征点采用红外发光LED,相机镜头前加装红外滤光片,有效滤除其它光谱。考虑到航天模拟器工作过程中,特征点可能存在遮挡或者故障,实验时在航天模拟器上放置了7个特征点,只要保证测量时刻获得5个特征点的图像坐标,即可实现航天模拟器的位姿参数测量。
在上述3个待测位置,分别进行10次重复测量。表1给出了航天模拟器位姿参数测量的均值、标准差及最大偏差结果,其中 、
、 、
、 (实验时
(实验时 为相机深度方向)为待测位移,
为相机深度方向)为待测位移, 、
、 、
、 为待测姿态角。
为待测姿态角。
由表1可以看出,在三个待测位置,位移 、
、 的测量标准差最大值为0.044 mm,最大偏差的最大值为0.113 mm,位移
的测量标准差最大值为0.044 mm,最大偏差的最大值为0.113 mm,位移 的测量标准差最大值为0.36 mm,最大偏差的最大值为0.874 mm。姿态角
的测量标准差最大值为0.36 mm,最大偏差的最大值为0.874 mm。姿态角 、
、 、
、 的测量标准差最大值
的测量标准差最大值 ,最大偏差的最大值为
,最大偏差的最大值为 。
。
上述测量数据表明,在接近3000 mm的深度测量范围内,本文的测量方法获得了较好的测量结果。另外,考虑到实验时, 是相机的深度方向,上述数据中
是相机的深度方向,上述数据中 的测量误差显著大于
的测量误差显著大于 、
、 的结果,这与单目相机深度误差大的特点是一致的。
的结果,这与单目相机深度误差大的特点是一致的。
4. 结论
本文提出了一种采用单目相机实现航天模拟器位姿参数测量的方法。介绍了基于单目视觉的航天模拟器位姿测量系统组成,建立了基于单目视觉实现特征点坐标测量的模型,在此基础上推导了航天模拟器位姿求解模型。最后,进行了实验验证,实验结果表明本文方法能实现基于单目视觉的航天模拟器位姿测量,并且获得了较高的测量精度。
文章引用
孙维荣,张 龙. 采用单目视觉的航天模拟器位姿参数测量研究
Research on Measurement of Pose Parameters of Aerospace Simulator Based on Monocular-Vision System[J]. 计算机科学与应用, 2017, 07(03): 274-279. http://dx.doi.org/10.12677/CSA.2017.73034
参考文献 (References)
- 1. Shih, S.-E. and Tsai, W.-H. (2013) Optimal Design and Placement of Omni-Cameras in Binocular Vision Systems for Accurate 3-D Data Measurement. IEEE Transactions on Circuits and Systems for Video Technology, 23, 1911-1926. https://doi.org/10.1109/TCSVT.2013.2269021
- 2. Sabzevari, R. and Scaramuzza, D. (2016) Multi-Body Motion Estimation from Monocular Vehicle-Mounted Cameras. IEEE Transactions on Robotics, 32, 638-651. https://doi.org/10.1109/TRO.2016.2552548
- 3. Liu, C.J. and Zhang, Y. (2016) 3D Trajectory Reconstruction from Monocular Vision Based on Prior Spatial Knowledge. IEEE Sensors Journal, 16, 817-822. https://doi.org/10.1109/JSEN.2015.2487039
- 4. Chiang, P.J. and Ping, G.H. (2013) Stereo Vision for the Measurement of Turning Tool Size. IEEE Sixth International Workshop on Computational Intelligence & Applications, 13-13 July 2013, 173-177. https://doi.org/10.1109/iwcia.2013.6624809
- 5. Chen, J.C. and Zhao, L.P. (2010) A Stereo Vision-Based Attitude Measurement System for Aircraft Model in Wind Tunnel. International Conference on Computer Application and System Modeling, 9, 456-460.
- 6. 李喆, 丁振良, 袁锋. 光学测量的飞行器空间姿态测量方法[J]. 哈尔滨工业大学学报, 2008, 29(3): 232-236.
- 7. 赵玉华, 袁锋, 丁振良. 合作目标的飞行器姿态测量方法及其误差补偿模型的建立[J]. 电机与控制学报, 2010, 14(9): 36-40.
- 8. Robert, M.H., Lee, C.-N., Ottenberg, K. and Nolle, M. (1994) Review and Analysis of Solutions of the Three Point Perspective Pose Estimation Problem. International Journal of Computer Vision, 13, 331-356. https://doi.org/10.1007/BF02028352