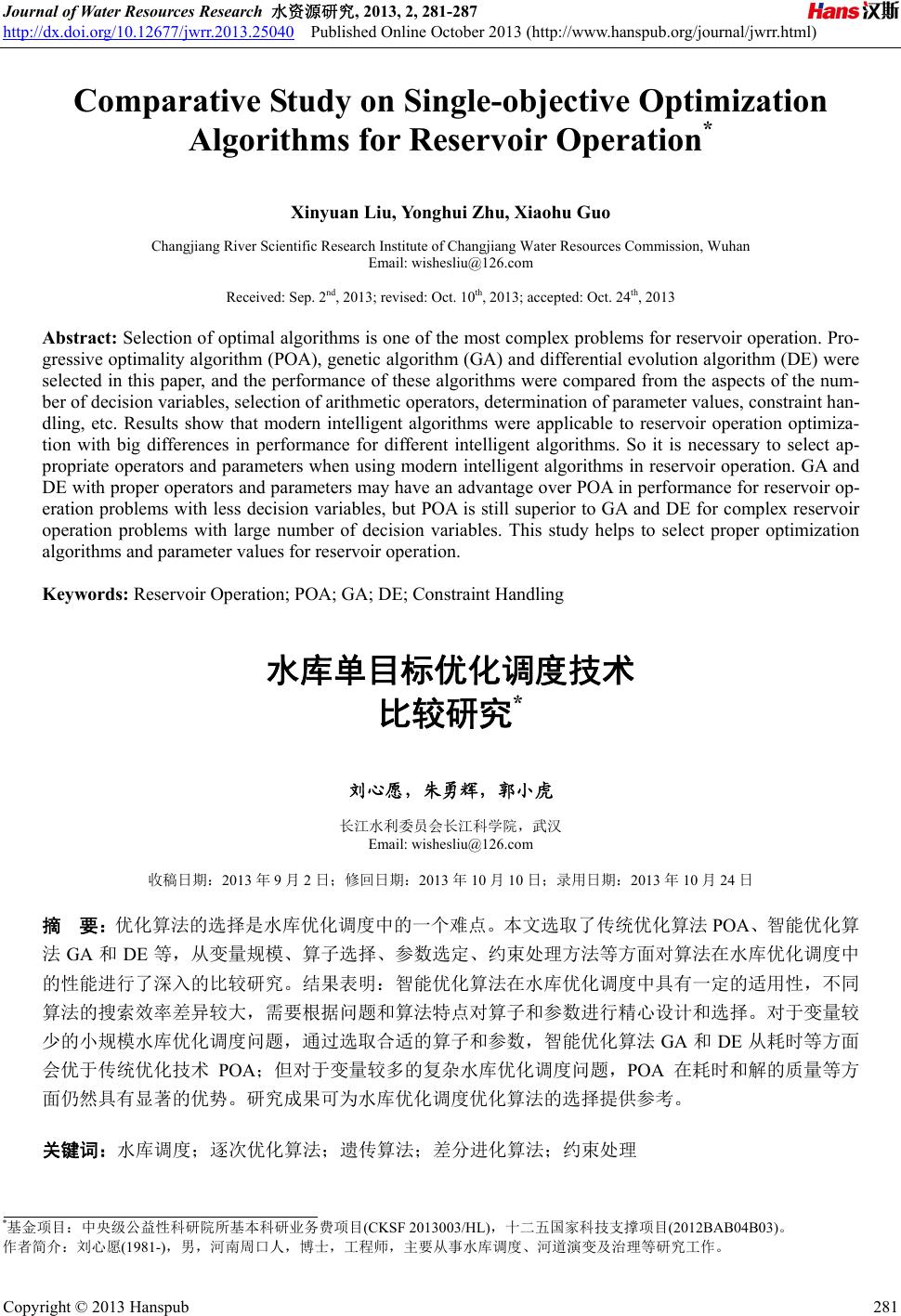
 Journal of Water Resources Research 水资源研究, 2013, 2, 281-287 http://dx.doi.org/10.12677/jwrr.2013.25040 Published Online October 2013 (http://www.hanspub.org/journal/jwrr.html) Comparative Study on Single-objective Optimization Algorithms for Reservoir Operation* Xinyuan Liu, Yonghui Zhu, Xiaohu Guo Changjiang River Scientific Research Institute of Changjiang Water Resources Commission, Wuhan Email: wishesliu@126.com Received: Sep. 2nd, 2013; revised: Oct. 10th, 2013; accepted: Oct. 24th, 2013 Abstract: Selection of optimal algorithms is one of the most complex problems for reservoir operation. Pro- gressive optimality algorithm (POA), genetic algorithm (GA) and differential evolution algorithm (DE) were selected in this paper, and the performance of these algorithms were compared from the aspects of the num- ber of decision variables, selection of arithmetic operators, determination of parameter values, constraint han- dling, etc. Results show that modern intelligent algorithms were applicable to reservoir operation optimiza- tion with big differences in performance for different intelligent algorithms. So it is necessary to select ap- propriate operators and parameters when using modern intelligent algorithms in reservoir operation. GA and DE with proper operators and parameters may have an advantage over POA in performance for reservoir op- eration problems with less decision variables, but POA is still superior to GA and DE for complex reservoir operation problems with large number of decision variables. This study helps to select proper optimization algorithms and parameter values for reservoir operation. Keywords: Reservoir Operation; POA; GA; DE; Constraint Handling 水库单目标优化调度技术 比较研究* 刘心愿,朱勇辉,郭小虎 长江水利委员会长江科学院,武汉 Email: wishesliu@126.com 收稿日期:2013 年9月2日;修回日期:2013年10月10 日;录用日期:2013 年10 月24 日 摘 要:优化算法的选择是水库优化调度中的一个难点。本文选取了传统优化算法 POA、智能优化算 法GA 和DE 等,从变量规模、算子选择、参数选定、约束处理方法等方面对算法在水库优化调度中 的性能进行了深入的比较研究。结果表明:智能优化算法在水库优化调度中具有一定的适用性,不同 算法的搜索效率差异较大,需要根据问题和算法特点对算子和参数进行精心设计和选择。对于变量较 少的小规模水库优化调度问题,通过选取合适的算子和参数,智能优化算法 GA 和DE从耗时等方面 会优于传统优化技术 POA;但对于变量较多的复杂水库优化调度问题,POA 在耗时和解的质量等方 面仍然具有显著的优势。研究成果可为水库优化调度优化算法的选择提供参考。 关键词:水库调度;逐次优化算法;遗传算法;差分进化算法;约束处理 *基金项目:中央级公益性科研院所基本科研业务费项目(CKSF 2013003/HL),十二五国家科技支撑项目(2012BAB04B03)。 作者简介:刘心愿(1981-),男,河南周口人,博士,工程师,主要从事水库调度、河道演变及治理等研究工作。 Copyright © 2013 Hanspub 281 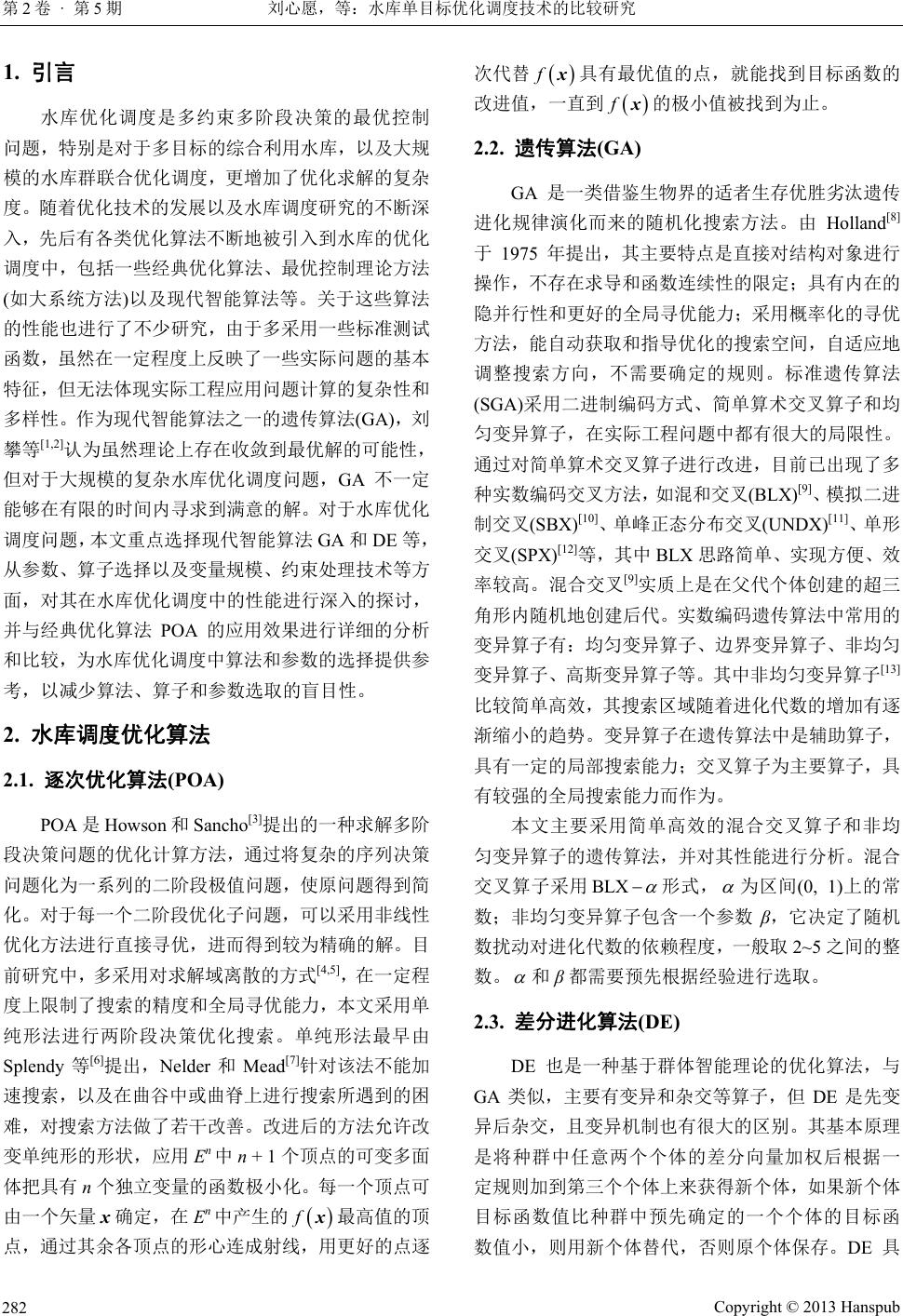 刘心愿,等:水库单目标优化调度技术的比较研究 Copyright © 2013 Hanspub 第2卷 · 第5期 282 1. 引言 水库优化调度是多约束多阶段决策的最优控制 问题,特别是对于多目标的综合利用水库,以及大规 模的水库群联合优化调度,更增加了优化求解的复杂 度。随着优化技术的发展以及水库调度研究的不断深 入,先后有各类优化算法不断地被引入到水库的优化 调度中,包括一些经典优化算法、最优控制理论方法 (如大系统方法)以及现代智能算法等。关于这些算法 的性能也进行了不少研究,由于多采用一些标准测试 函数,虽然在一定程度上反映了一些实际问题的基本 特征,但无法体现实际工程应用问题计算的复杂性和 多样性。作为现代智能算法之一的遗传算法(GA),刘 攀等[1,2]认为虽然理论上存在收敛到最优解的可能性, 但对于大规模的复杂水库优化调度问题,GA 不一定 能够在有限的时间内寻求到满意的解。对于水库优化 调度问题,本文重点选择现代智能算法 GA 和DE 等, 从参数、算子选择以及变量规模、约束处理技术等方 面,对其在水库优化调度中的性能进行深入的探讨, 并与经典优化算法 POA 的应用效果进行详细的分析 和比较,为水库优化调度中算法和参数的选择提供参 考,以减少算法、算子和参数选取的盲目性。 2. 水库调度优化算法 2.1. 逐次优化算法(POA) POA 是Howson 和Sancho[3]提出的一种求解多阶 段决策问题的优化计算方法,通过将复杂的序列决策 问题化为一系列的二阶段极值问题,使原问题得到简 化。对于每一个二阶段优化子问题,可以采用非线性 优化方法进行直接寻优,进而得到较为精确的解。目 前研究中,多采用对求解域离散的方式[4,5],在一定程 度上限制了搜索的精度和全局寻优能力,本文采用单 纯形法进行两阶段决策优化搜索。单纯形法最早由 Splendy 等[6]提出,Nelder和Mead[7]针对该法不能加 速搜索,以及在曲谷中或曲脊上进行搜索所遇到的困 难,对搜索方法做了若干改善。改进后的方法允许改 变单纯形的形状,应用En中n + 1 个顶点的可变多面 体把具有 n个独立变量的函数极小化。每一个顶点可 由一个矢量 x确定,在 En中产生的 最高值的顶 点,通过其余各顶点的形心连成射线,用更好的点逐 次代替 fx fx具有最优值的点,就能找到目标函数的 改进值,一直到 fx的极小值被找到为止。 2.2. 遗传算法(GA) GA 是一类借鉴生物界的适者生存优胜劣汰遗传 进化规律演化而来的随机化搜索方法。由 Holland[8] 于1975 年提出,其主要特点是直接对结构对象进行 操作,不存在求导和函数连续性的限定;具有内在的 隐并行性和更好的全局寻优能力;采用概率化的寻优 方法,能自动获取和指导优化的搜索空间,自适应地 调整搜索方向,不需要确定的规则。标准遗传算法 (SGA)采用二进制编码方式、简单算术交叉算子和均 匀变异算子,在实际工程问题中都有很大的局限性。 通过对简单算术交叉算子进行改进,目前已出现了多 种实数编码交叉方法,如混和交叉(BLX)[9]、模拟二进 制交叉(SBX)[10]、单峰正态分布交叉(UNDX)[11]、单 形 交叉(SPX)[12]等,其中 BLX 思路简单、实现方便、效 率较高。混合交叉[9]实质上是在父代个体创建的超三 角形内随机地创建后代。实数编码遗传算法中常用的 变异算子有:均匀变异算子、边界变异算子、非均匀 变异算子、高斯变异算子等。其中非均匀变异算子[13] 比较简单高效,其搜索区域随着进化代数的增加有逐 渐缩小的趋势。变异算子在遗传算法中是辅助算子, 具有一定的局部搜索能力;交叉算子为主要算子,具 有较强的全局搜索能力而作为。 本文主要采用简单高效的混合交叉算子和非均 匀变异算子的遗传算法,并对其性能进行分析。混合 交叉算子采用 BLX 形式, 为区间(0, 1)上的常 数;非均匀变异算子包含一个参数 β,它决定了随机 数扰动对进化代数的依赖程度,一般取 2~5 之间的整 数。 和β都需要预先根据经验进行选取。 2.3. 差分进化算法(DE) DE 也是一种基于群体智能理论的优化算法,与 GA 类似,主要有变异和杂交等算子,但 DE 是先变 异后杂交,且变异机制也有很大的区别。其基本原理 是将种群中任意两个个体的差分向量加权后根据一 定规则加到第三个个体上来获得新个体,如果新个体 目标函数值比种群中预先确定的一个个体的目标函 数值小,则用新个体替代,否则原个体保存。DE 具 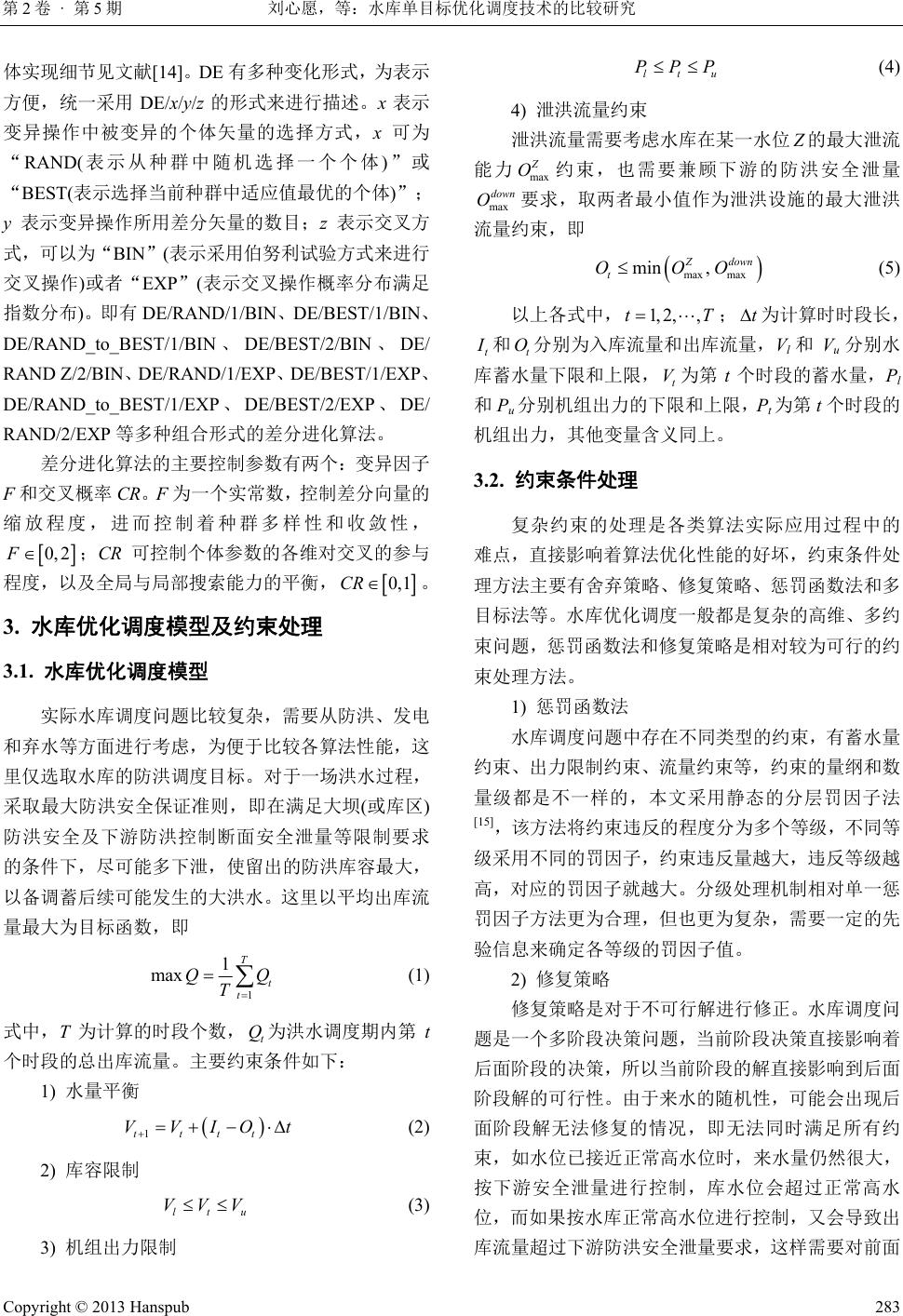 刘心愿,等:水库单目标优化调度技术的比较研究 第2卷 · 第5期 体实现细节见文献[14]。DE 有多种变化形式,为表示 方便,统一采用 DE/x/y/z的形式来进行描述。x表示 变异操作中被变异的个体矢量的选择方式,x可为 “RAND( 表示从种群中随机选择一个个体)”或 “BEST(表示选择当前种群中适应值最优的个体)”; y表示变异操作所用差分矢量的数目;z表示交叉方 式,可以为“BIN”(表示采用伯努利试验方式来进行 交叉操作)或者“EXP”(表示交叉操作概率分布满足 指数分布)。即有 DE/RAND/1/BIN、DE/BEST/1/BIN、 DE/RAND_to_BEST/1/BIN 、DE/BEST/2/BIN 、DE/ RAND Z/2/BIN、DE/RAND/1/EXP、DE/BEST/1/EXP、 DE/RAND_to_BEST/1/EXP 、DE/BEST/2/EXP 、DE/ RAND/2/EXP 等多种组合形式的差分进化算法。 差分进化算法的主要控制参数有两个:变异因子 F和交叉概率 CR。F为一个实常数,控制差分向量的 缩放程度,进而控制着种群多样性和收敛性, 0, 2F;CR可控制个体参数的各维对交叉的参与 程度,以及全局与局部搜索能力的平衡, 0, 1CR 。 3. 水库优化调度模型及约束处理 3.1. 水库优化调度模型 实际水库调度问题比较复杂,需要从防洪、发电 和弃水等方面进行考虑,为便于比较各算法性能,这 里仅选取水库的防洪调度目标。对于一场洪水过程, 采取最大防洪安全保证准则,即在满足大坝(或库区) 防洪安全及下游防洪控制断面安全泄量等限制要求 的条件下,尽可能多下泄,使留出的防洪库容最大, 以备调蓄后续可能发生的大洪水。这里以平均出库流 量最大为目标函数,即 1 1 max T t t Q T Q (1) 式中,T为计算的时段个数,为洪水调度期内第t 个时段的总出库流量。主要约束条件如下: t Q 1) 水量平衡 1tttt VVIO t u u (2) 2) 库容限制 lt VVV (3) 3) 机组出力限制 lt PPP (4) 4) 泄洪流量约束 泄洪流量需要考虑水库在某一水位 Z的最大泄流 能力 max Z O n 约束,也需要兼顾下游的防洪安全泄量 要求,取两者最小值作为泄洪设施的最大泄洪 流量约束,即 max dow O max max min , Z down t OOO (5) 以上各式中, 1, 2,,tT ; 为计算时时段长,t t I 和 分别为入库流量和出库流量,Vl和Vu分别水 库蓄水量下限和上限, 为第 t个时段的蓄水量,Pl 和Pu分别机组出力的下限和上限,Pt为第 t个时段的 机组出力,其他变量含义同上。 t O t V 3.2. 约束条件处理 复杂约束的处理是各类算法实际应用过程中的 难点,直接影响着算法优化性能的好坏,约束条件处 理方法主要有舍弃策略、修复策略、惩罚函数法和多 目标法等。水库优化调度一般都是复杂的高维、多约 束问题,惩罚函数法和修复策略是相对较为可行的约 束处理方法。 1) 惩罚函数法 水库调度问题中存在不同类型的约束,有蓄水量 约束、出力限制约束、流量约束等,约束的量纲和数 量级都是不一样的,本文采用静态的分层罚因子法 [15],该方法将约束违反的程度分为多个等级,不同等 级采用不同的罚因子,约束违反量越大,违反等级越 高,对应的罚因子就越大。分级处理机制相对单一惩 罚因子方法更为合理,但也更为复杂,需要一定的先 验信息来确定各等级的罚因子值。 2) 修复策略 修复策略是对于不可行解进行修正。水库调度问 题是一个多阶段决策问题,当前阶段决策直接影响着 后面阶段的决策,所以当前阶段的解直接影响到后面 阶段解的可行性。由于来水的随机性,可能会出现后 面阶段解无法修复的情况,即无法同时满足所有约 束,如水位已接近正常高水位时,来水量仍然很大, 按下游安全泄量进行控制,库水位会超过正常高水 位,而如果按水库正常高水位进行控制,又会导致出 库流量超过下游防洪安全泄量要求,这样需要对前面 Copyright © 2013 Hanspub 283 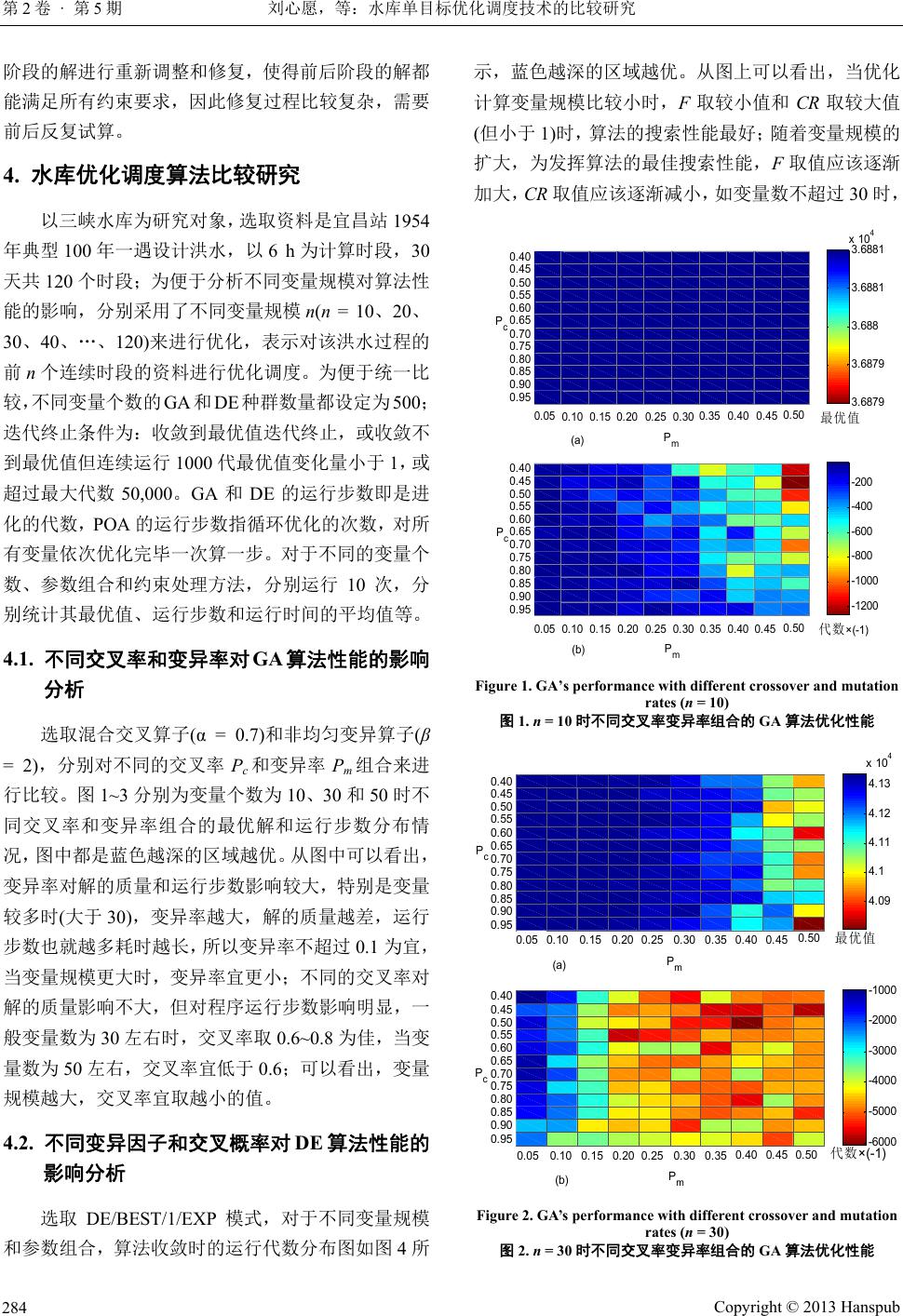 刘心愿,等:水库单目标优化调度技术的比较研究 第2卷 · 第5期 阶段的解进行重新调整和修复,使得前后阶段的解都 能满足所有约束要求,因此修复过程比较复杂,需要 前后反复试算。 4. 水库优化调度算法比较研究 以三峡水库为研究对象,选取资料是宜昌站 1954 年典型 100 年一遇设计洪水,以6 h为计算时段,30 天共 120 个时段;为便于分析不同变量规模对算法性 能的影响,分别采用了不同变量规模 n(n = 10、20、 30、40、…、1 20)来进行优化,表示对该洪水过程的 前n个连续时段的资料进行优化调度。为便于统一比 较,不同变量个数的GA 和DE 种群数量都设定为500; 迭代终止条件为:收敛到最优值迭代终止,或收敛不 到最优值但连续运行 1000 代最优值变化量小于1,或 超过最大代数 50,000。GA 和DE 的运行步数即是进 化的代数, POA 的运行步数指循环优化的次数,对所 有变量依次优化完毕一次算一步。对于不同的变量个 数、参数组合和约束处理方法,分别运行 10 次,分 别统计其最优值、运行步数和运行时间的平均值等。 4.1. 不同交叉率和变异率对 GA算法性能的影响 分析 选取混合交叉算子(α = 0.7)和非均匀变异算子(β = 2),分别对不同的交叉率 Pc和变异率 Pm组合来进 行比较。图 1~3 分别为变量个数为10、30 和50 时不 同交叉率和变异率组合的最优解和运行步数分布情 况,图中都是蓝色越深的区域越优。从图中可以看出, 变异率对解的质量和运行步数影响较大,特别是变量 较多时(大于30),变异率越大,解的质量越差,运行 步数也就越多耗时越长,所以变异率不超过 0.1 为宜, 当变量规模更大时,变异率宜更小;不同的交叉率对 解的质量影响不大,但对程序运行步数影响明显,一 般变量数为 30 左右时,交叉率取 0.6~0.8为佳,当变 量数为 50 左右,交叉率宜低于 0.6;可以看出,变量 规模越大,交叉率宜取越小的值。 4.2. 不同变异因子和交叉概率对 DE 算法性能的 影响分析 选取 DE/BEST/1/EXP 模式,对于不同变量规模 和参数组合,算法收敛时的运行代数分布图如图 4所 示,蓝色越深的区域越优。从图上可以看出,当优化 计算变量规模比较小时,F取较小值和 CR 取较大值 (但小于 1)时,算法的搜索性能最好;随着变量规模的 扩大,为发挥算法的最佳搜索性能,F取值应该逐渐 加大, CR 取值应该逐渐减小,如变量数不超过 30 时, 2468 10 2 4 6 8 10 12 3.6879 3.6879 3. 688 3.6881 3.6881 x 10 4 2468 10 2 4 6 8 10 12 -1200 -1000 -800 -600 -400 -200 P m 0.15 0.200.250.300.400.350.05 0.10 0.45 0.50 0.05 0.10 0.15 0.20 0.25 0.300.35 0.400.45 P m (a) (b) 0. 50 最优值 代数 ×(-1) 0. 40 0. 45 0. 50 0. 90 0. 75 0. 70 0. 65 0. 95 0. 55 0. 60 0. 40 0. 45 0. 50 0. 55 0. 60 0. 65 0. 70 0. 75 0. 80 0. 85 0. 90 0. 95 0. 85 P c 0. 80 P c Figure 1. GA’s performance with different crossover and mutation rates (n = 10) 图1. n = 10时不同交叉率变异率组合的 GA 算法优化性能 2468 10 2 4 6 8 10 12 2468 10 2 4 6 8 10 12 4. 09 4. 1 4. 11 4. 12 4. 13 x 104 -6000 -5000 -4000 -3000 -2000 -1000 Pm Pm Pc (a) 0.150.20 0.250.30 0. 200. 150.100.35 0.40 0.450.50 最优值 代数×(-1) Pc 0. 35 0. 95 0. 90 0. 85 0. 80 0. 70 0. 65 0. 60 0. 55 0. 50 0. 45 0. 40 0. 75 0.95 0. 05 0. 90 0. 85 0. 80 0. 75 0. 70 0. 65 0. 60 0. 55 0. 50 0. 45 0. 40 0.25 0.30 0.400.450.50 0. 100.05 (b) Figure 2. GA’s performance with different crossover and mutation rates (n = 30) 图2. n = 30时不同交叉率变异率组合的 GA 算法优化性能 Copyright © 2013 Hanspub 284 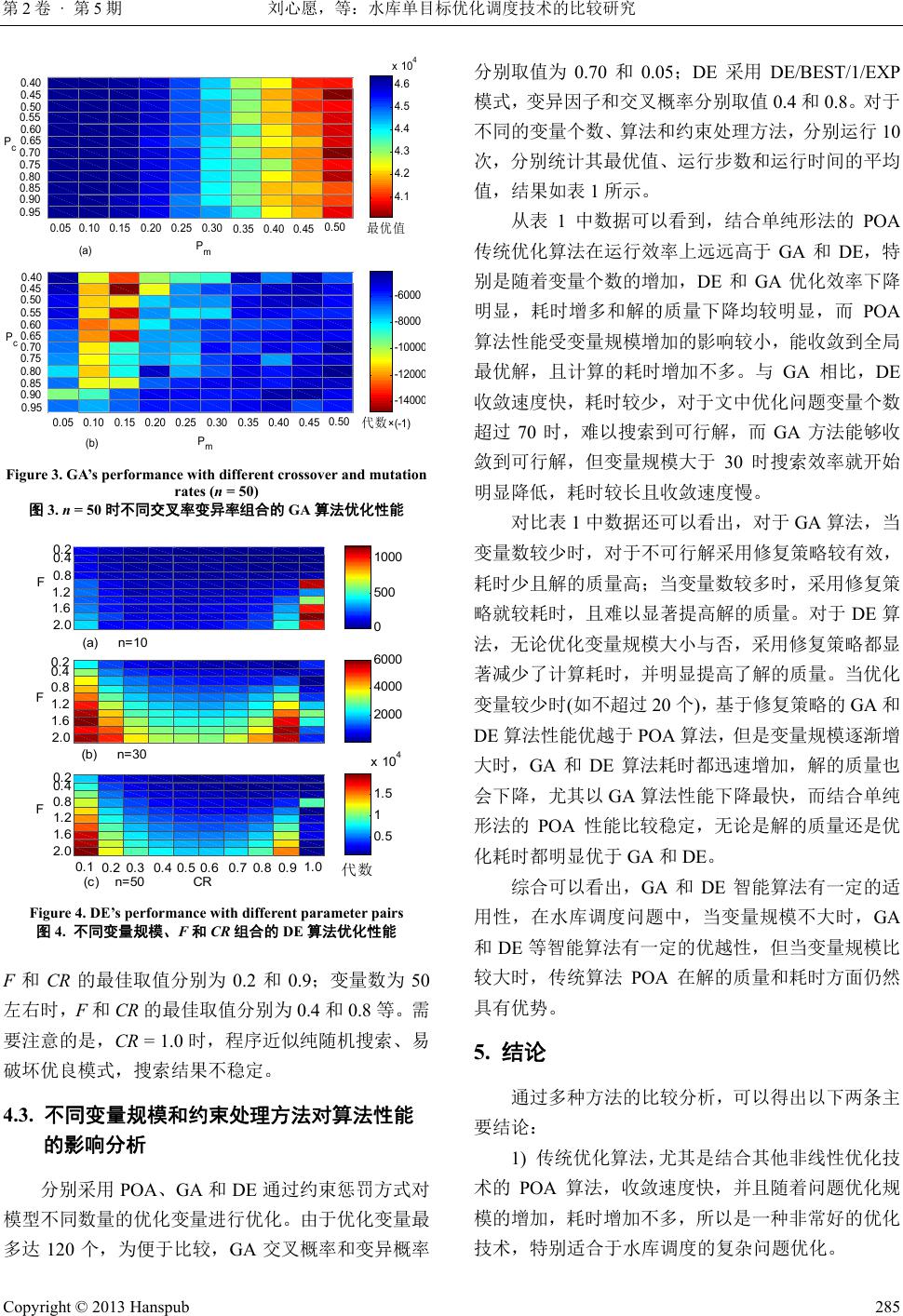 刘心愿,等:水库单目标优化调度技术的比较研究 第2卷 · 第5期 2 4 6 810 2 4 6 8 10 12 4.1 4.2 4.3 4.4 4.5 4.6 x 10 4 2 4 6 810 2 4 6 8 10 12 -1400 0 -1200 0 -1000 0 -8000 -6000 P m P m 0. 450.400.35 0.50 0.300.250.200.150.100.05 (a) 0. 40 0. 45 0. 50 0.55 0. 60 0. 65 0.70 0.75 0.80 0.90 0.95 0.40 0. 45 0. 50 0. 55 0. 75 0. 70 0. 65 0. 60 0. 80 0. 85 0. 90 0.85 P c P c 0.95 (b) 0.100.050.15 0.20 0.250.30 0.35 0.40 0.450.50 最优值 代数 ×(-1) Figure 3. GA’s performance withifferent crossover and mutation d rates (n = 50) 图3. n = 50时不同交叉率变异率组合的 GA 算法优化性能 24 6 810 2 4 6 8 10 F 0 500 1000 24 6 810 2 4 6 8 10 24 6 810 2 4 6 8 10 0.5 1 1.5 x 10 4 2000 4000 6000 CR F F 1.0 代数 (b) n=30 (a) n=10 1.6 0.1 (c) n=50 0.20.30.4 0.5 0.60.7 0.80.9 2.0 0.2 0.2 0.4 F 0.4 0.8 1.2 0.8 1.2 1.6 2.0 0.2 0.8 1.2 1.6 2.0 0.4 Figure 4. DE’s performance with different parameter pairs 和CR的最佳取值分别为0.2 和0.9;变量数为 50 4.3. 不同变量规模和约束处理方法对算法性能 分别采用 POA、GA和DE 通过约束惩罚方式对 模型 看到,结合单纯形法的POA 传统 GA 算法,当 变量 有一定的适 用性 结论 方法的比较分析,可以得出以下两条主 要结 算法,尤其是结合其他非线性优化技 术的 图4. 不同变量规模、F和CR 组合的 DE 算法优化性能 F 左右时,F和CR 的最佳取值分别为0.4 和0.8 等。需 要注意的是,CR = 1.0时,程序近似纯随机搜索、易 破坏优良模式,搜索结果不稳定。 的影响分析 不同数量的优化变量进行优化。由于优化变量最 多达 120 个,为便于比较,GA 交叉概率和变异概率 分别取值为 0.70和0.05;DE 采用 DE/BEST/1/EXP 模式,变异因子和交叉概率分别取值0.4 和0.8。对 于 不同的变量个数、算法和约束处理方法,分别运行 10 次,分别统计其最优值、运行步数和运行时间的平均 值,结果如表 1所示。 从表 1中数据可以 优化算法在运行效率上远远高于 GA 和DE,特 别是随着变量个数的增加,DE和GA 优化效率下降 明显,耗时增多和解的质量下降均较明显,而 POA 算法性能受变量规模增加的影响较小,能收敛到全局 最优解,且计算的耗时增加不多。与 GA相比,DE 收敛速度快,耗时较少,对于文中优化问题变量个数 超过 70时,难以搜索到可行解,而 GA 方法能够收 敛到可行解,但变量规模大于 30时搜索效率就开始 明显降低,耗时较长且收敛速度慢。 对比表 1中数据还可以看出,对于 数较少时,对于不可行解采用修复策略较有效, 耗时少且解的质量高;当变量数较多时,采用修复策 略就较耗时,且难以显著提高解的质量。对于 DE 算 法,无论优化变量规模大小与否,采用修复策略都显 著减少了计算耗时,并明显提高了解的质量。当优化 变量较少时(如不超过20 个),基于修复策略的 GA和 DE 算法性能优越于POA 算法,但是变量规模逐渐增 大时,GA 和DE算法耗时都迅速增加,解的质量也 会下降,尤其以GA 算法性能下降最快,而结合单纯 形法的 POA 性能比较稳定,无论是解的质量还是优 化耗时都明显优于 GA 和DE。 综合可以看出,GA和DE 智能算法 ,在水库调度问题中,当变量规模不大时,GA 和DE 等智能算法有一定的优越性,但当变量规模比 较大时,传统算法 POA 在解的质量和耗时方面仍然 具有优势。 5. 通过多种 论: 1) 传统优化 POA 算法,收敛速度快,并且随着问题优化规 模的增加,耗时增加不多,所以是一种非常好的优化 技术,特别适合于水库调度的复杂问题优化。 Copyright © 2013 Hanspub 285 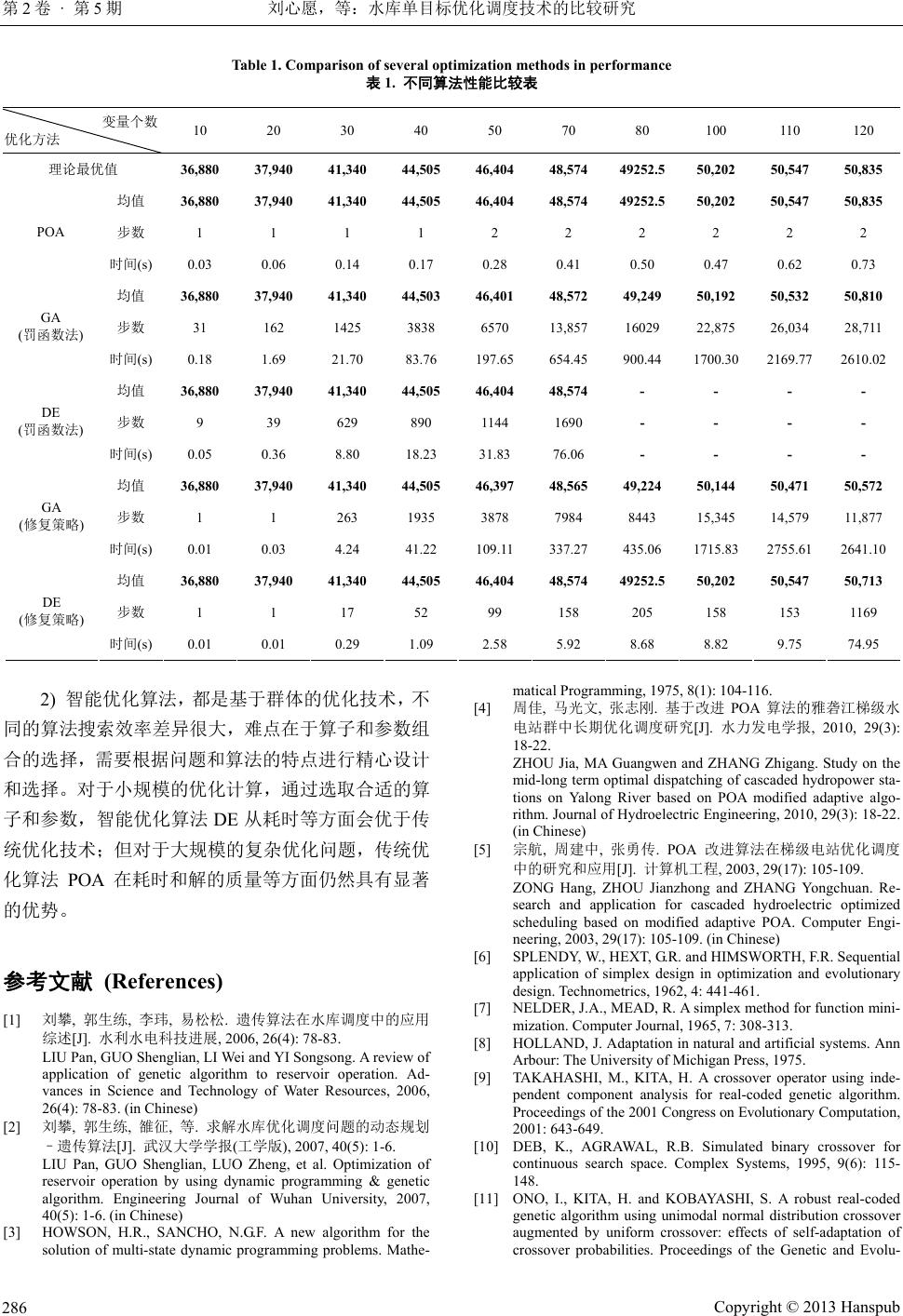 刘心愿,等:水库单目标优化调度技术的比较研究 Copyright © 2013 Hanspub 第2卷 · 第5期 286 timization methods in performance 变量个数 优化方法 10 20 30 40 50 70 80 100 110 120 Table 1. Comparison of several op 表1. 不同算法性能比较表 理论最优值 36,495 50,50,50,880 37,940 41,340 44,505 46,404 48,574 252.202 547 835 均值 POA 时0. 0 0 0 0 0 0 0 0 0 3 44 4 4 55 5 GA (罚函数法) 时 3 DE (罚函数法) 时0. 3 449 GA (修复策略) 时0. 0 3 4 DE (修复策略) 时0. 0 36,880 37,940 41,340 44,505 46,404 48,574 49252.5 50,202 50,547 50,835 步数 1 1 1 1 2 2 2 2 2 2 间(s) 03 .06 .14 .17 .28 .41 .50 .47 .62 .73 均值 36,8807,9401,340 4,5036,40148,5729,2490,192 0,5320,810 步数 31 162 1425 3838 6570 13,857 16029 22,875 26,034 28,711 间(s) 0.18 1.69 21.70 83.76 197.65 654.45 900.44 1700.30 2169.77 2610.02 均值 36,8807,94041,340 44,505 46,404 48,574 - - - - 步数 9 39 629 890 1144 1690 - - - - 间(s) 05 0.36 8.80 18.23 31.83 76.06 - - - - 均值 36,8807,9401,340 44,505 46,397 48,565 ,224 50,144 50,471 50,572 步数 1 1 263 1935 3878 7984 8443 15,345 14,579 11,877 间(s) 01.03 4.24 41.22 109.11 337.27 435.06 1715.83 2755.61 2641.10 均值 36,8807,9401,340 44,505 46,404 48,574 49252.5 50,202 50,547 50,713 步数 1 1 17 52 99 158 205 158 153 1169 间(s) 01.01 0.29 1.09 2.58 5.92 8.68 8.82 9.75 74.95 2) 智能优化算法,都是基于群体的优化技术,不 同的 参考文献 (References) 算法在水库调度中的应 namic programming problems. Mathe- matical Programming, 1975, 8(1): 104-116. ver probabilities. Proceedings of the Genetic and Evolu- 算法搜索效率差异很大,难点在于算子和参数组 合的选择,需要根据问题和算法的特点进行精心设计 和选择。对于小规模的优化计算,通过选取合适的算 子和参数,智能优化算法 DE从耗时等方面会优于传 统优化技术;但对于大规模的复杂优化问题,传统优 化算法 POA 在耗时和解的质量等方面仍然具有显著 的优势。 [1] 刘攀, 郭生练, 李玮, 易松松. 遗传用 [ 综述[J]. 水利水电科技进展, 2006, 26(4): 78-83. LIU Pan, GUO Shenglian, LI Wei and YI Songsong. A review of application of genetic algorithm to reservoir operation. Ad- vances in Science and Technology of Water Resources, 2006, 26(4): 78-83. (in Chinese) [2] 刘攀, 郭生练, 雒征, 等. 求解水库优化调度问题的动态规划 –遗传算法[J 武汉学]. 大 学报(工学版), 2007, 40(5): 1-6. LIU Pan, GUO Shenglian, LUO Zheng, et al. Optimization of reservoir operation by using dynamic programming & genetic algorithm. Engineering Journal of Wuhan University, 2007, 40(5): 1-6. (in Chinese) [3] HOWSON, H.R., SANCHO, N.G.F. A new algorithm for the solution of multi-state dy [4] 周佳, 马光文, 张志刚. 基于改进 POA 算法的雅砻江梯级水 电站群中长期优化调度研究[J]. 水力发电学报, 2010, 29(3): 18-22. ZHO Jia, M Guangwen and ZHANG ZhUAigang. Study on the mid-long term optimal dispatching of cascaded hydropower sta- tions on Yalong River based on POA modified adaptive algo- rithm. Journal of Hydroelectric Engineering, 2010, 29(3): 18-22. (in Chinese) [5] 宗航, 周建中, 张勇传. POA 改进算法在梯级电站优化调度 中的研究和应用[J]. 计算机工程, 2003, 29(17): 105-109. ZONG Hang, ZHOU Jianzhong and ZHANG Yongchuan. Re- search and application for cascaded hydroelectric optimized scheduling based on modified adaptive POA. Computer Engi- neering, 2003, 29(17): 105-109. (in Chinese) [6] SPLENDY, W., HEXT, G.R. and HIMSWORTH, F.R. Sequential application of simplex design in optimization and evolutionary design. Technometrics, 1962, 4: 441-461. NELDER, J.A., MEAD, R. A simplex method7] for function mini- mization. Computer Journal, 1965, 7: 308-313. [8] HOLLAND, J. Adaptation in natural and artificial systems. Ann Arbour: The University of Michigan Press, 1975. [9] TAKAHASHI, M., KITA, H. A crossover operator using inde- pendent component analysis for real-coded genetic algorithm. Proceedings of the 2001 Congress on Evolutionary Computation, 2001: 643-649. [10] DEB, K., AGRAWAL, R.B. Simulated binary crossover for continuous search space. Complex Systems, 1995, 9(6): 115- 148. ONO, I., KITA, [11] H. and KOBAYASHI, S. A robust real-coded genetic algorithm using unimodal normal distribution crossover augmented by uniform crossover: effects of self-adaptation of crosso  刘心愿,等:水库单目标优化调度技术的比较研究 第2卷 · 第5期 tionary Computation Conference, San Mateo: Morgan Kauf- mann Publishers, 1999: 496-503. [12] TSUTSUI, S., YAMAMURA, M. and HIGUCHI, T. Multi- parent recombination with simplex crossover in real coded ge- netic algorithms. Proceedings of the Genetic and Evolutionary Computation Conference, San Mateo: Morgan Kaufmann Pub- York: Springer-Verlag, 1996. ournal, hms. Simulation, 1994, 62(4): 242-254. lishers, 1999: 657-664. [13] MICHALEWICZ, Z. Genetic Algorithms + Data Structures = Evolution Programs. New [14] PRICE, K.V., STORN, R. Differential evolution—A simple evolution strategy for fast optimization. Dr. Dobb’s J 1997, 22: 18-24. [15] HOMAIFAR, A., LAI, S. and QI, X. Constrained optimization via genetic algorit Copyright © 2013 Hanspub 287 |