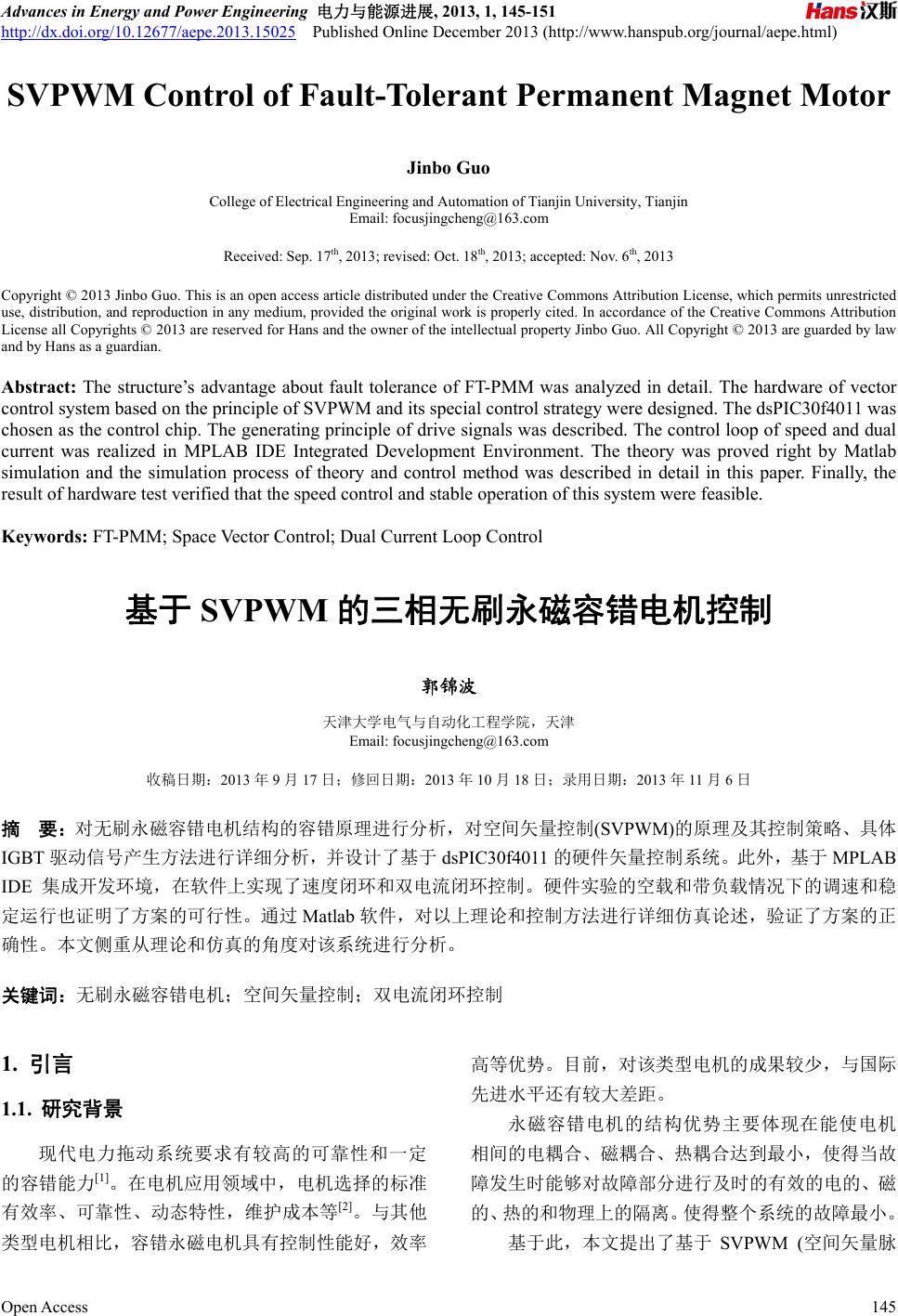
 Advances in Energy and Power Engineering 电力与能源进展, 2013, 1, 145-151 http://dx.doi.org/10.12677/aepe.2013.15025 Published Online December 2013 (http://www.hanspub.org/journal/aepe.html) SVPWM Control of Fault-Tolerant Permanent Magnet Motor Jinbo Guo College of Electrical Engineering and Automation of Tianjin University, Tianjin Email: focusjingcheng@163.com Received: Sep. 17th, 2013; revised: Oct. 18th, 2013; accepted: Nov. 6th, 2013 Copyright © 2013 Jinbo Guo. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accordance of the Creative Commons Attribution License all Copyrights © 2013 are reserved for Hans and the owner of the intellectual property Jinbo Guo. All Copyright © 2013 are guarded by law and by Hans as a guardian. Abstract: The structure’s advantage about fault tolerance of FT-PMM was analyzed in detail. The hardware of vector control system based on the principle of SVPWM and its special control strategy were designed. The dsPIC30f4011 was chosen as the control chip. The generating principle of drive signals was described. The control loop of speed and dual current was realized in MPLAB IDE Integrated Development Environment. The theory was proved right by Matlab simulation and the simulation process of theory and control method was described in detail in this paper. Finally, the result of hardware test verified that the speed control and stable operation of this system were feasible. Keywords: FT-PMM; Space Vector Control; Dual Current Loop Control 基于 SVPWM 的三相无刷永磁容错电机控制 郭锦波 天津大学电气与自动化工程学院,天津 Email: focusjingcheng@163.com 收稿日期:2013 年9月17 日;修回日期:2013年10月18日;录用日期:2013年11月6日 摘 要:对无刷永磁容错电机结构的容错原理进行分析,对空间矢量控制(SVPWM)的原理及其控制策略、具体 IGBT 驱动信号产生方法进行详细分析,并设计了基于dsPIC30f4011 的硬件矢量控制系统。此外,基于MPLAB IDE 集成开发环境,在软件上实现了速度闭环和双电流闭环控制。硬件实验的空载和带负载情况下的调速和稳 定运行也证明了方案的可行性。通过 Matlab 软件,对以上理论和控制方法进行详细仿真论述,验证了方案的正 确性。本文侧重从理论和仿真的角度对该系统进行分析。 关键词:无刷永磁容错电机;空间矢量控制;双电流闭环控制 1. 引言 1.1. 研究背景 现代电力拖动系统要求有较高的可靠性和一定 的容错能力[1]。在电机应用领域中,电机选择的标准 有效率、可靠性、动态特性,维护成本等[2]。与其他 类型电机相比,容错永磁电机具有控制性能好,效率 高等优势。目前,对该类型电机的成果较少,与国际 先进水平还有较大差距。 永磁容错电机的结构优势主要体现在能使电机 相间的电耦合、磁耦合、热耦合达到最小,使得当故 障发生时能够对故障部分进行及时的有效的电的、磁 的、热的和物理上的隔离。使得整个系统的故障最小。 基于此,本文提出了基于 SVPWM (空间矢量脉 Open Access 145  基于 SVPWM 的三相无刷永磁容错电机控制 宽调制)的容错永磁电机控制方法,并构建matlab 数 学模型,从仿真和实验的角度对SVPWM 控制方法的 优势进行分析验证。因此对无刷永磁容错电机矢量控 制的研究是很有意义的。 1.2. 国内外研究现状 从1996 年6相和4相无刷永磁容错电机的研制 成功,第一次把电机绕组以相位单位分隔,实现了每 相独立控制[3],2009 年,福特电机公司对永磁容错电 机的相数、槽数等参数进行了仿真研究[4]。此外,北 京航空航天大学对四相永磁容错电机的控制方案进 行了研究。近期,三相永磁容错电机故障仿真也被 提出[5]。 2. 无刷永磁容错电机矢量控制原理及仿真 2.1. 空间矢量脉宽调制的基本原理 三相交流电机的矢量控制原理的本质就是把定 子电流通过三相静止坐标变换,转化成 2相静止坐标, 在转化到两相旋转坐标系中,把定子侧的 3相电流转 化成磁通,转矩 2个分量,且相互垂直,实现磁链和 转矩的解耦,形成类似于直流电动机的调节方式。通 过转换,可以用直流电机的控制方法来控制交流电 机,这样就得到了直流电机良好地调速性能。 2.2. 无刷永磁容错电机结构及特点 把无刷永磁电机的每相绕组分别放在定子齿两 边的不同槽中,通过物理上的隔离防止相邻的相与相 之间故障相互影响,同时得到较小的电与磁耦合,达 到电机容错功能的目的[6],具体如下图 1。定子的每 相绕组绕在一个电枢齿上面,每个槽只有一个绕组, 而那些没有绕组的电枢齿用来作为磁通回路,达到相 间隔离的作用。这种结构的电机绕组由于没有重叠而 产生物理隔离。避免了发生相间短路的问题[7]。 2.3. 无刷永磁容错电机矢量控制系统总框图 在本文设计的系统中,系统由最小系统,具有容 错机构的永磁同步电机,驱动电路,3组全桥逆变器, 电流、转速检测部分组成,如图2所示。 Aa C c Figure 1. Fault-tolerant PMSM is three-phase winding connections 图1. 容错 PMSM 的三相绕组连接方式 2.4. id = 0控制方法分析 如上图 3所示,三相交流永磁同步电机的三相反 馈电流通过坐标变换,成为转子磁链定向的两相电 流,id、iq,通过使 id = 0,即磁通分量电流为 0,使 得定子侧电流is (电枢磁动势)与q轴重合,与转子励 磁磁场正交,实现电机产生的电磁转矩与is 成正比。 实现了励磁绕组与定子电枢绕组的解耦,各自独立, 只要控制id 大小,就能控制电机转矩,实现调速。 2.5. SVPWM控制方法分析[8] 本文采用在结构和控制上相互独立的3组逆变单 元完成逆变功能。该结构具有一定的容错能力。 如图 4所示,各个独立的全桥单元由4个IGBT 功率开关器件组成,上下桥臂交替导通,每个全桥的 对角位置的开关器件同时导通、关断,分析如下: 我们假定各相上上桥臂导通记为1,下桥臂导通 记为 0,则由 6桥臂开关器件组成的 3相逆变器,可 能输出的电压组合有:000 、001 、010、011、100、 101、11 0、111,每种组合可以形成一个空间电压向量, 而000,111 两种组合因为上桥臂或者下桥臂同时导 通,所以定义为无效量。以100 为例,表示6个开关 器件的 A相上桥臂导通,B相下桥臂导通,C相下桥 臂导通,所以相当于 UA,-UB,-UC的向量组合,所 以通过向量图分析我们得到组合而成的空间电压矢 量u1(如下图 5所示)。6种有效状态组合成的空间电 压矢量为下图6。 基于 SVPWM 控制系统在具体控制芯片中驱动信 Open Access 146  基于 SVPWM 的三相无刷永磁容错电机控制 Open Access 147 Figure 2. Fault tolerant permanent magnet motor control system for the overall structur e o f figure 图2. 永磁容错电机控制系统整体结构图 Figure 3. Permanent magnet synchronous motor rotor flux oriented vector 图3. 永磁同步电机转子磁链定向矢量图 号的产生,主要包括以下几个步骤:扇区的判断;占 空数值计算;各扇区向量作用时间分配。 2.6. 7段式空间矢量算法分析 以第一扇区的时间计算为例,由图分析,结合正 弦定理,可以得到: 0.41 π42sin 3 out cDC TaU TU ; 0.4142 sin out cDC TbU TU 其中,Uout 为合成电压矢量,θ为合成矢量与参 考矢量的夹角,Ta 、 Tb 分别为用于合成 Uout 的相邻2 个空间向量作用的时间,TS为开关周期,零向量作用 时间为 02 s TTTaTb ,本文中运用dis- 1芯片产生PWM波 为…0-4-6-7-7-6-4-0…, 产生 2.7. 无刷永磁容错电机矢量控制系统仿真 基于无刷永磁容错电机的空间矢量控制 ,结合 SVP 2.8. 仿真结果 通过 matla 仿真,实现了无刷永磁容错电机的空 间矢 300 r/min,逆 变器 PIC30f401 ,采用中心对齐的方式, 并把零向量均分,以减少开关器件通断频率,确保每 次换相只有一个开关动作。 例如在第一扇区:开关顺序 合成电压矢量u1,形成 PWM 波形如下图7;其 他各扇区原理相同。 [9] WM 的电压调制方法和 id = 0的控制策略,构建 了matlab 仿真模型,仿真中的电机模型通过使电机绕 组各相间互感系数为 0,等效于相间隔离的目的。整 体结构图如图8。 量控制,结果如下图 9到图 11。 在matlab 仿真中,设定速度给定为 直流侧电压为 100 V,当 t = 0.1时加入负载,负 载转矩为1.2 N*m。分析结果,可以看出:1) 刚开始 电机启动时,产生了一定的启动转矩,此时转矩 Te 产生一个波动(图11所示);在 t = 0.1 s,加入负载, 输出转矩变成1.2 左右;2) 电机启动后,定子电流保 持稳定,t = 0.1 s时刻,随着负载的加入,电流也相 应变大(图10 所示);符合理论的结果。 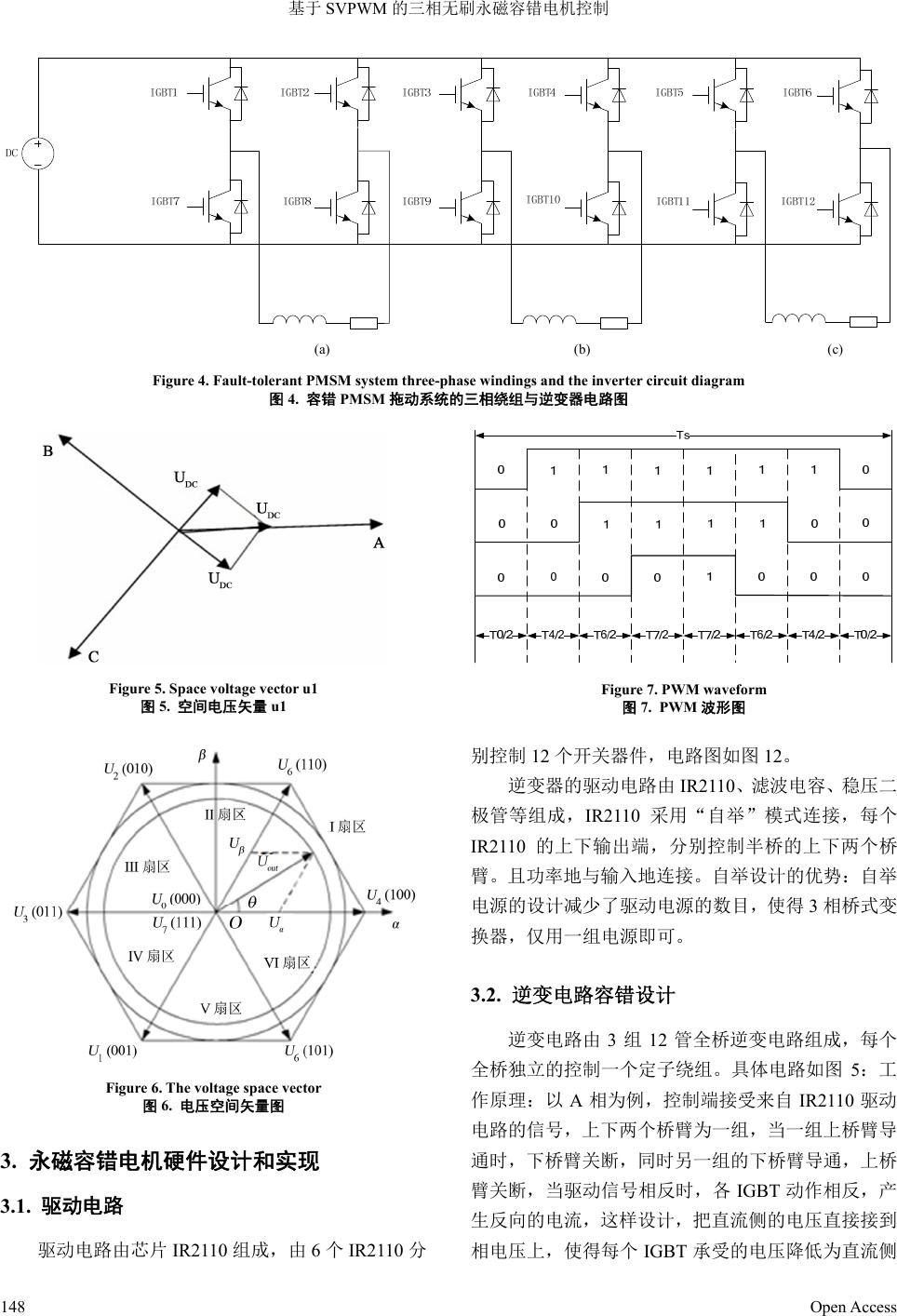 基于 SVPWM 的三相无刷永磁容错电机控制 (a) (b) (c) Figure 4. Fault-tolerant P MSM system three-phase windings and the inverter circuit diagram 图4. 容错 PMSM 拖动系统的三相绕组与逆变器电路图 Figure 5. Space voltage vector u1 图5. 空间电压矢量u1 Figure 6. The voltage space vector 3. 永磁容错电机硬件设计和实现 驱动电路 驱动电路由芯片IR2110组成,由 6个IR2110分 图6. 电压空间矢量图 3.1. Figure 7. PWM waveform 图7. PWM 波形图 别控制 12 个开关。 逆变器的驱动电路由 IR2110、滤波电容、稳压二 接,每个 IR21 桥逆变电路组成,每个 的控制一个定子绕组。具体电路如图 5:工 作原 器件图如图12,电路 极管等组成,IR2110采用“自举”模式连 10 的上下输出端,分别控制半桥的上下两个桥 臂。且功率地与输入地连接。自举设计的优势:自举 电源的设计减少了驱动电源的数目,使得 3相桥式变 换器,仅用一组电源即可。 3.2. 逆变电路容错设计 逆变电路由 3组12 管全 全桥独立 理:以 A相为例,控制端接受来自 IR2110驱动 电路的信号,上下两个桥臂为一组,当一组上桥臂导 通时,下桥臂关断,同时另一组的下桥臂导通,上桥 臂关断,当驱动信号相反时,各IGBT动作相反,产 生反向的电流,这样设计,把直流侧的电压直接接到 相电压上,使得每个 IGBT 承受的电压降低为直流侧 Open Access 148 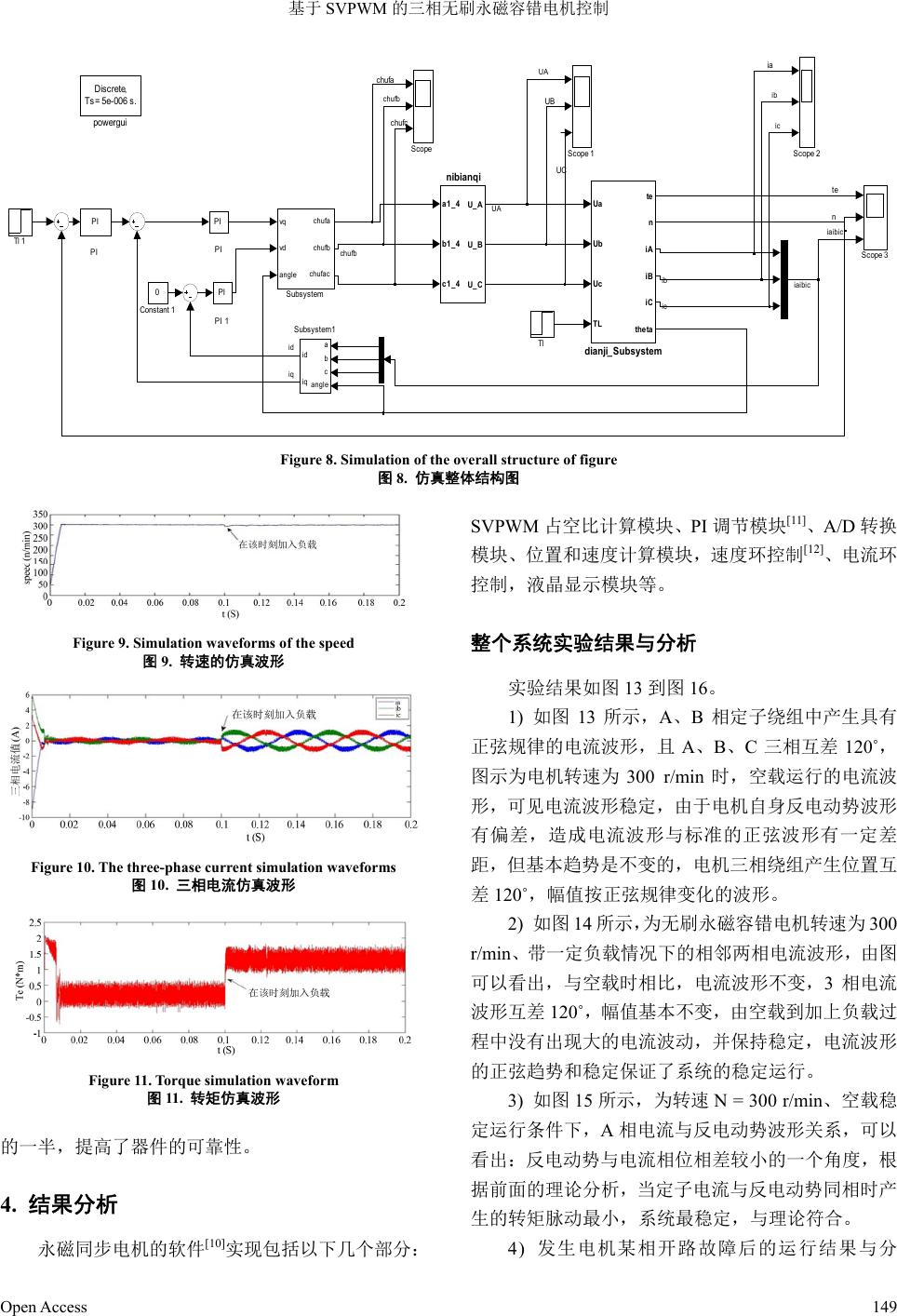 基于 SVPWM 的三相无刷永磁容错电机控制 chufa chufc UB UC ia te n powerg ui Discrete, Ts = 5e-006 s. nibianqi a1_4 b1 _4 c1_4 U_A U_B U_C dianji_Subsystem Ua Ub Uc TL te n iA iB iC theta Tl 1 Tl Subsystem1 a b c angle id iq Subsystem vq vd angle chufa chufb chufac Scope 3 Scope 2 Scope 1 Scope Constant 1 0 PI 1 PI PI PI PI PI id iq chufb chufb UA UA ib ic iaibic ib ic iaibic Figure 8. Simulation of the overall structure of figure 图8. 仿真整体结构图 Figure 9. Simulation waveforms of the speed 图9. 转速的仿真波形 Figure 10. The three-pha se current simulation waveforms 图10. 三相电流仿真波形 Figure 11. Torque simulation waveform 图11. 转矩仿真波形 的一半,提 永磁同步电机的软件[10]实现包括以下几个部分: 模块、PI 调节模块[11]、A/D 转换 模块、位置和速度计算模块,速度环控制[12]、电流环 控制,液晶显示模块等。 整个系统实验结果与分 、B、C三相互差 120˚, 图示为电机转速为300 r/min时,空载运行的电流波 电机自身反电动势波形 有偏差,造成电流波形与标准的正弦波形有一定差 距, 波形互差120˚,幅值基本不变,由空载到加上负载过 程中没有出现大的电流波动,并保持稳定,电流波形 的正弦趋 据前面的理论 ,当定子电流与反电动势同相时产 生的转矩脉动最小,系统最稳定,与理论符合。 4) 发生电机某相开路故障后的运行结果与分 高了器件的可靠性。 4. 结果分析 SVPWM占空比计算 析 实验结果如图13 到图 16。 1) 如图 13所示,A、B相定子绕组中产生具有 正弦规律的电流波形,且 A 形,可见电流波形稳定,由于 但基本趋势是不变的,电机三相绕组产生位置互 差120˚,幅值按正弦规律变化的波形。 2) 如图 14 所示,为无刷永磁容错电机转速为300 r/min、带一定负载情况下的相邻两相电流波形,由图 可以看出,与空载时相比,电流波形不变,3相电流 势和稳定保证了系统的稳定运行。 3) 如图15 所示,为转速 N = 300 r/min、空载稳 定运行条件下,A相电流与反电动势波形关系,可以 看出:反电动势与电流相位相差较小的一个角度,根 分析 Open Access 149  基于 SVPWM 的三相无刷永磁容错电机控制 Figure 12. Chip IR2110 driver circuit 图12. 芯片IR2110组成的驱动电路 Figure 13. A, B phase no-load current 图13. A 、B相空载电流波形 Figure 14. A, B, phase load current 图14. A 、B相加载时电流波形 析。如图 16 所示,为空载条件下,断开 A相后,转 速n = 200 r/min 时的电流波形,由图可以看出,在绕 组开路故障发 流120˚,即 生开路故障后,没有发生故障的两相电流波形与故 生B电流超前 C相电后, 相 发 障前基本一样,电机可以继续运行,验证了容错电机 Figure 15. Current and Back-EMF of A 图15. A相电流与 A相反电动势波形 Figure 16. Current of A under open circuit fault 图16. A相开路故障下的空载电流波形 特殊结构设计的优势。 5. 结论 本文采用id = 0 的控制策略实现了无刷永磁容错 Open Access 150  基于 SVPWM 的三相无刷永磁容错电机控制 电机的 SVPWM 控制。针对容错电机的特殊结构:1) 通过空间坐标变换,把三相无刷永磁容错电机这个多 变量、非线性并且各变量耦合较强的复杂的系统简 化,实现id、iq 的精确解耦控制。并对 SVPWM 具体 控制信号产生原理进行分析。2) 在matlab 软件上实 现了完整的闭环控制系统仿真,并构建了容错电机 学模型,在仿真中对系统负载变化、调速等性能进 验证。3) 通过硬件测试,实现了空载和带负载情况下 的调速和稳定运行,仿真与实物系统运行结果一致 验证了容错电机结构本身及该控制方案在实际应用 的优势和可行性。 (References) [1] 沈天珉, 胡育文, 郝振洋 (2011) 基于电压调制的永磁 ang, J.B. and Howe, D. (2002) Modular t magnet brushless machines. Power Electronics, Machines and Drives, International Conference, Bath, 4-7 June 2002, 415-420. 机的结构设计与研究. 硕士 . 数[7 行[ , an 中 参考文献 容错 电机转矩控制系统仿真. 南京航空航天大学, 南京. [2] 高扬 (2006) 电气传动自动控制系统优化设计方法研究. 硕 士学位论文, 西北工业大学, 西安. [3] 齐蓉, 陈明 (2005) 永磁容错电机及容错驱动结构研究. 西 北工业大学学报 , 4, 475-478. [4] Ede, J.D., Atallah, K., W fault-tolerant permanen [5] 任宝珠 (2013) 三相永磁容错电 学位论文, 大连海事大学, 大连 [6] 齐蓉 (2005) 永磁容错电机及容错驱动结构研究. 硕士学位 论文, 西北工业大学, 西安. 控制. 硕士学位] 任元 (2009) 四相永磁容错电机的SVPWM 论文, 北京航空航天大学, 北京. Van Der Broeck, H.W., Skudelny, H.C.8] and Stanke, G.V. (1988) Analysis and realization of a pulse width modulator based on voltage space vectors. IEEE Trsactions on Industry Applica- tions, 24, 142-150. [9] 华建军 (2008) 基于 FPGA的永磁同步电机控制器的研究. 硕士学位论文, 江南大学, 无锡. 杨振强基于 dsPIC 的永磁[10] (2007) 同步电机矢量控制系统. 硕士学位论文, 大连理工大学, 大连. 永[11] 王春民 (2008) 基于 DSP 磁同步电动机矢量控制系统的设 计. 吉林大学学报 , 4, 343-346. [12] 李晓刚 (2012) 三相永磁同步电机伺服控制系统设计与仿真. 硕士学位论文, 南京理工大学, 南京. Open Access 151 |