设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Advances in Energy and Power Engineering
电力与能源进展
, 2013, 1, 158-164
http://dx.doi.org/10.12677/aepe.2013.15027
Published Online December 2013 (http://www.hanspub.org/journal/aepe.html)
The Comparison Study of System Damping Characteristics in
Different Models of Doubly Fed Induction Generators
*
Qiang Lu, Chongtao Li, Zhengchun Du
School of Electrical Engineering, Xi’an Jiaotong University, Xi’an
Email: luqiang.ee@stu.xjtu.edu.cn
Received: Nov. 19
th
, 2013; revised: Dec. 10
th
, 2013; accepted: Dec. 17
th
, 2013
Copyright © 2013 Qiang Lu et al. This is an open access article
distributed under the Creative Commons Attribution License, which permits unre-
stricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accordance of the
Creative Commons At-
tribution License all Copyrights © 2013 are reserved for Hans and the owner of the intellectual property Qiang Lu et al. All Co
pyright © 2013 are
guarded by law and by Hans as a guardian.
Abstract:
The detailed model of DFIG, which includes the model of turbine, the model of rotor side control (RSC) con-
trol and the model of grid side converter (GSC) control. Then the detailed modes are reduced to the different degree to
get the reduced modes. The reduced models include three di
fferent kinds: neglecting the ef
fect of GSC control, which
means that the GSC control is an ideal
one; neglecting the effect of rotor tran
sient based on the former kind; neglecting
all the dynamic effects of DFIG, which are equivalent to the negative impedance. At last, the 10-generator 39-bus New
England system is studied to analyze the damping characte
ristics of detailed model and different reduced models. The
results show that: different models have different deviations of the oscillation mode; the more reduced of the model, the
bigger error of the result. To a degree, the reduced models of neglecting GSC control and the zero-axis model can be
used to replace the detailed model to anal
yze the damping characteristics of system.
Keywords:
Doubly Fed Induction Generator; Small Signal Stab
ility Analysis; Damping Characteristics; PI Control;
Reduced Models
双馈风机不同模型下系统阻尼特性对比分析
*
陆
强,李崇涛,杜正春
西安交通大学电气学院,西安
Email: luqiang.ee@stu.xjtu.edu.cn
收稿日期:
2013
年
11
月
19
日;修回日期:
2013
年
12
月
10
日;录用日期:
2013
年
12
月
17
日
摘
要:
本文首先介绍了双馈风机的详细模型,其详细模型包括电机部分的模型、转子侧换流器控制部分模型
以及电网侧换流器控制部分模型。然后对双馈风机的详细模型进行不同程度的简化以对其进行降阶。其简化模
型包括:
1)
忽略电网侧变换器控制作用,即认为其控制为理想情况;
2)
在
(1)
的基础上忽略转子磁链的暂态过
程,即所谓的零轴模型;
3)
忽略所有控制作用的负阻抗模型,即用一个恒定的阻抗代替双馈风机。最后以新英
格兰
10
机
39
节点系统为例,对比分析了双馈风机采用详细模型及不同简化模型时系统的阻尼特性。分析结果
表明,相对于详细模型,双馈风机的不同的简化模型得到的振荡模态的误差不尽相同,模型越详细,误差越小;
忽略网侧变换器与零轴模型这两种简化模型所得的结果偏差较小,可以在一定程度上代替详细模型对系统进行
阻尼特性分析。
关键词:
双馈风机;小干扰稳定性分析;阻尼特性;
PI
控制;简化模型
*
资助信息:国家电网公司科技项目“风火打捆能源基地交直流外送协调控制及安全防御系统研究与示范”。
Open Access
158
双馈风机不同模型下系统阻尼特性对比分析
Open Access
159
1.
引言
风能的清洁性、低成本、易扩展等特点使得它能
够用于解决日益严峻的环境问题以及不断增加的能
源需求问题
[1]
。
近年来,全世界的风力发电量不断增加,而中国
作为世界能源消耗大国,可再生能源特别是风能的发
展速度也不断加快。国家能源局公布的
2012
年数据
显示,此年中国风电发电量为
1008
亿千瓦时,同比
增长
41%
,风电发电量约占全国总上网电量的
2.0%
,
大量地减少了我家的二氧化碳、二氧化硫等气体的排
放量。
随着风力发电的容量在电力系统中所占比重不
断增加,其对系统的影响也成为国内外关注的对象。
文
[2]
和
[3]
在分别考虑或未考虑电网侧变换器作用下,
对双馈风机与无穷大系统连接的简单电力系统进行
了小干扰稳定性分析。文
[4]
分析了双馈风机的风轮机
部分采用不同的质量块模型时系统的小干扰稳定性,
而此时风机采用的是全阶详细模型。文
[5]
研究了双馈
风机在降阶模型下的小干扰稳定性。文
[6]
对一个三机
系统进行了小干扰稳定性分析,考虑了风机的不同运
行条件下系统特征值的变化。文
[7]
探讨了大规模双馈
风电场并网后对电力系统小干扰稳定性的影响。
目前双馈风机最广泛采用的是
PI
控制,
其转子侧
换流器的控制是选择
d
轴与定子磁链的方向一致的
dq
坐标变换,这样可以实现有功功率与无功功率的解耦
控制并实现最大风功率追踪
[8]
。文
[9]
中通过优化
PI
控制环节的参数以改善系统的动态性能。由于双馈风
机在考虑其所有
PI
环节时,微分方程较多,当大规模
风机并网时会使得系统状态矩阵阶数较高,计算分析
复杂。而当仅关心系统的阻尼特性时,能否对双馈风
机的模型进行适当地简化,使用较低阶的模型进行分
析和计算?其近似程度又是如何的?这是本文需要
研究的问题。
本文首先给出双馈风机的详细模型,包括风机模
型以及控制器模型,然后对详细模型进行了不同程度
的简化。简化模型包括:不考虑电网侧换流器的模型、
不考虑风机的暂态电势变化作用的零轴模型以及双
馈风机使用负阻抗的等值模型。基于以上模型分别计
算了新英格兰系统的机电振荡模态,并对各种简化模
型下系统的机电振荡模态与精确模型求得的结果进
行了对比分析。
2.
双馈风机的控制模型
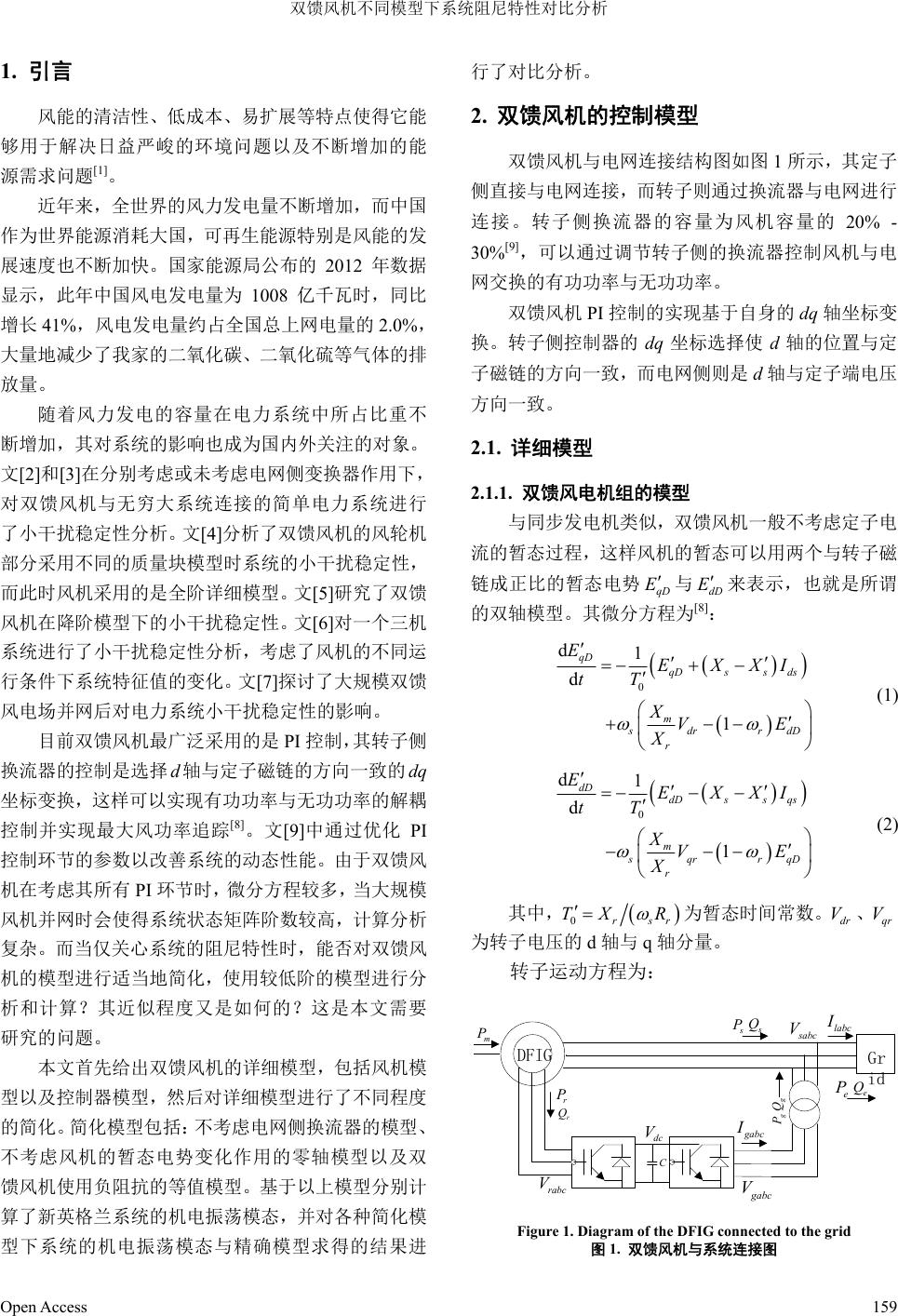
双馈风机与电网连接结构图如图
1
所示,其定子
侧直接与电网连接,而转子则通过换流器与电网进行
连接。转子侧换流器的容量为风机容量的
20% -
30%
[9]
,可以通过调节转子侧的换 流器 控制 风机 与电
网交换的有功功率与无功功率。
双馈风机
PI
控制的实现基于自身的
dq
轴坐标变
换。转子侧控制器的
dq
坐标选择使
d
轴的位置与定
子磁链的方向一致,而电网侧则是
d
轴与定子端电压
方向一致。
2.1.
详细模型
2.1.1.
双馈风电机组的模型
与同步发电机类似,双馈风机一般不考虑定子电
流的暂态过程,这样风机的暂态可以用两个与转子磁
链成正比的暂态电势
qD
E
与
来表示,也就是所谓
的双轴模型。其微分方程为
[8]
:
dD
E
0
d
1
d
1
qD
qDss ds
m
sdr rd
r
E
EXXI
tT
X
VE
X
D
(1)
0
d
1
d
1
dD
dDss qs
m
sqr rq
r
E
EXXI
tT
X
VE
X
D
(2)
其中,
0
rsr
TX R
为暂态时间常数。 、
为转子电压的
d
轴与
q
轴
分量。
dr
V
qr
V
转子运动方程为:
s
Q
s
P
s
abc
V
r
Q
r
P
rabc
V
dc
V
C
labc
I
g
Q
g
P
e
Q
g
abc
I
g
abc
V
m
P
e
P
Figure 1. Diagram of the DFIG connected to the grid
图
1.
双馈风机与系统连接图
双馈风机不同模型下系统阻尼特性对比分析
d
1
d2
r
me
D
TT
tH
为
(3)
其中为输入到风机的机械转矩,
e
T
风机输出
的电磁转矩。
m
T
当考虑电网
侧变换器作用时直流电容电压变化
的微分方程为:
d
d
rg
dc
dc
PP
V
C
tV
(4)
如图
1
所示,
其中 为转子侧注入换流器的有功
功率,
r
P
g
P
为电网侧变换器注入电网的有功功率,它们
的差值决定了直流电容上的电压变化。
电网侧变换器进行
dq
变换后有 ,
ds
VV
0
q
V
。
则可得电网侧变换器与电网连接代数方程为:
(5)
0
dgT qgs
VXIV
(6)
0
qgT dg
VXI
其中
T
X
为联络变压器阻抗。
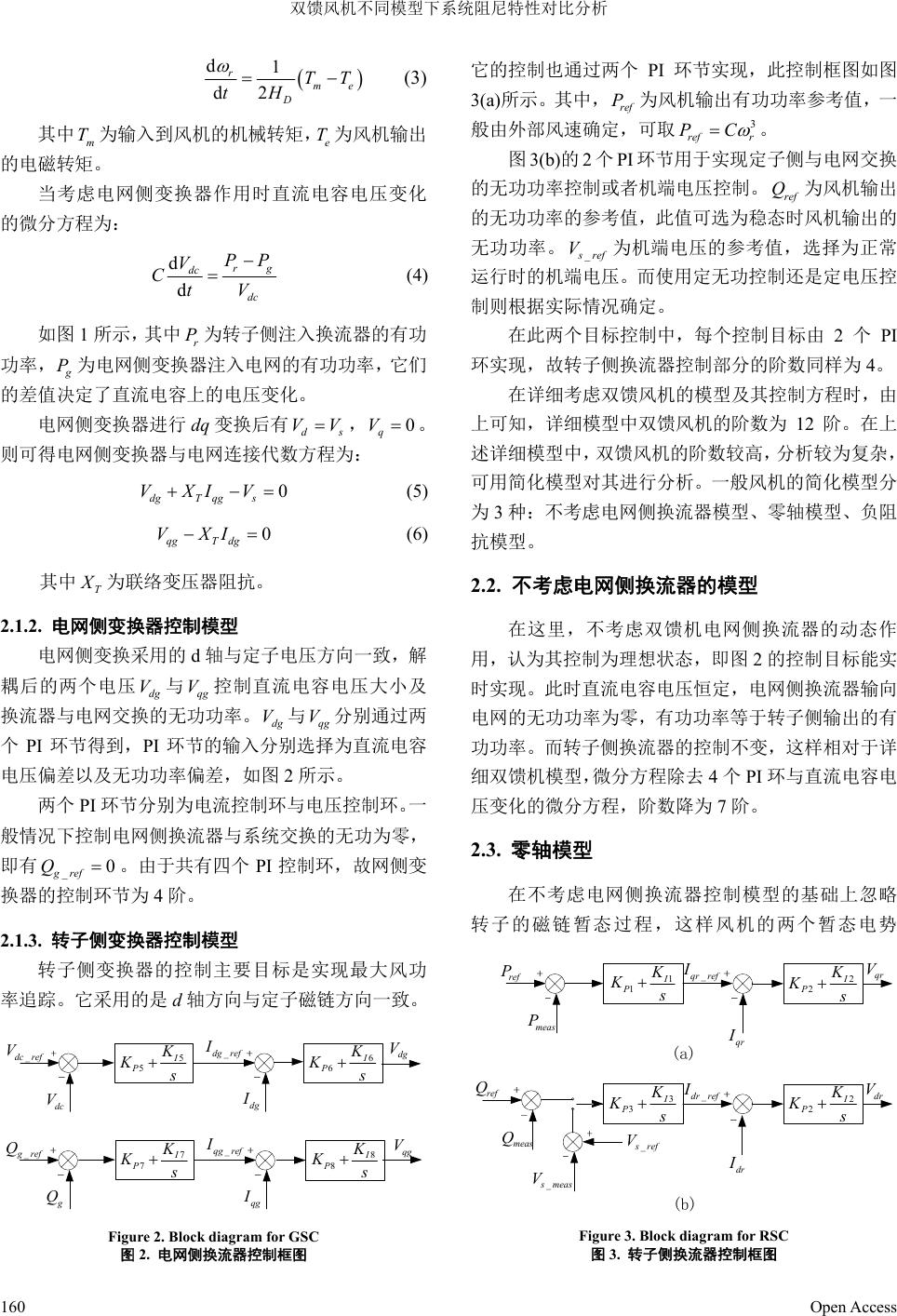
2.1.2.
电网侧变换器控制模型
电网侧变换采用的
d
轴与定子电压方向一致,解
耦后的两个电压
与
控制直流电容电压大小及
换流器与
电网交换的无功功率。 与分别通过两
个
PI
环节得到,
PI
环节的输入分别选择为直流电容
电压偏差以及无功功率偏差,如图
2
所示。
dg
V
qg
V
dg
V
qg
V
两个
PI
环节分别为电流控制环与电压控制环。一
般情况下控制电网侧换流器与系统交换的无功为零,
即有。由于共有四个
PI
控制环,故网侧变
换器的控制环节为
4
阶。
_
0
gref
Q
2.
1.3.
转子侧变换器控制模型
转子侧变换器的控制主要目标是实现最大风功
率追踪。它采用的是
d
轴方向与定子磁链方向一致。
_
dcref
V
dc
V
5
5
I
P
K
K
s
_
dg ref
I
dg
I
6
6
I
P
K
K
s
dg
V
_
g
ref
Q
g
Q
7
7
I
P
K
K
s
_
qg ref
I
qg
I
8
8
I
P
K
K
s
qg
V
Figure 2. Block diagram for GSC
图
2.
电网侧换流器控制框图
它的控制也通过两个
PI
环节实现,此控制框图如图
3(a)
所示。其中, 为风机输出有功功率参考值,一
般由外部风速确定,可取
ref
P
3
ref r
PC
。
图
3(b)
的
2
个
PI
环节用于实现定子侧与电网交换
的无功功率控制或者机端电压控制。 为风机输出
的无功功
率的参考值,此值可选为稳态时风机输出的
无功功率。
ref
Q
_
s
ref
V
为机端电压的参考值,选择为正常
运行时的机端电压。而使用定无功控制还是定电压控
制则根据实际情况确定。
在此两个目标控制中,每个控制目标由
2
个
PI
环实现,故转子侧换流器控制部分的阶数同样为
4
。
在详细考虑双馈风机的模型及其控制方程时,由
上可知,详细模型中双馈风机的阶数为
12
阶。在上
述详细模型中,双馈风机的阶数较高,分析较为复杂,
可用简化模型对其进行分析。一般风机的简化模型分
为
3
种:不考虑电网侧换流器模型、零轴模型、负阻
抗模型。
2.2.
不考虑电网侧换流器的模型
在这里,不考虑双馈机电网侧换流器的动态作
用,认为其控制为理想状态,即图
2
的控制目标能实
时实现。此时直流电容电压恒定,电网侧换流器输向
电网的无功功率为零,有功功率等于转子侧输出的有
功功率。而转子侧换流器的控制不变,这样相对于详
细双馈机模型,微分方程除去
4
个
PI
环与直流电容电
压变化的微分方程,阶数降为
7
阶。
2.3.
零轴模型
在不考虑电网侧换流器控制模型的基础上忽略
转子的磁链暂态过程,这样风机的两个暂态电势
ref
P
meas
P
1
1
I
P
K
K
s
_
qrref
I
2
2
I
P
K
K
s
qr
I
dr
I
qr
V
_
s
ref
V
_
s
meas
V
3
3
I
P
K
K
s
_
drref
I
2
2
I
P
K
K
s
dr
V
ref
Q
meas
Q
(a)
(b)
Figure 3. Block diagram for RSC
图
3.
转子侧换流器控制框图
Open Access
160
双馈风机不同模型下系统阻尼特性对比分析
认为保持恒定不变。这种简化的理论依据是转子磁链
的暂态过程相对于其它暂态较快,忽略其作用误差不
会太大
[10]
。此时风机只有一个转子运动方程,而其暂
态电势对应的微分方程转化为代数方程。加上转子侧
变换器两个
PI
环的
4
个微分方程,此时总阶数降为
5
阶。
2.4.
负阻抗模型
这里对双馈风机作进一步简化,认为其是一个恒
定不变的负阻抗模型。其计算式为:
2
D
ee
V
Z
PjQ
(7)
在式
(7)
中,
D
V
为双馈风机的机端电压, 与
为风机输出的有功与无功功率。当双馈风机采用此模
型时,其
状态方程阶数为
0
。
e
P
e
Q
3.
阻尼特性分析基础
电力系统的动态行为由一组非线性的微分—代
数方程进行描述
,
0,
xfxy
gxy
(8)
其中, 、 分别为状态变量和代数变量。在稳
态运行点处对上式线性化,得
x
0
,
xy
y
0
(9)
xx
AB
0y
CD
消去代数
变量,系统的状态矩阵表示如下:
y
1
AABDC
A
的一对共轭特征值对应一个振荡模态:
j
(10)
特征值的实部刻画了系统对振荡的阻尼,而虚部
则指出了振荡的频率。振荡频率(Hz)为
2
π
f
(11)
定义阻尼比为
22
(12)
它给出了振荡幅值的衰减率和衰减特性。
与同步机转速和功角强相关的模态为系统的机
电振荡模态,其频率一般为
0.1 - 2.5 Hz
。对于由
m
台
同步机组成的互联电力系统中,一般认为系统中的机
电振荡模态总数为
m
−
1
。对机电振荡模态的判断可
以通过机电回路相关比进行
[11]
。
4.
算例分析
以图
4
所示的新英格兰系统为例进行双馈风机不
同模型下系统的阻尼特性分析。新英格兰系统的模型
和参数见
[12]
。在分析时,将
G8
换为双馈风机,其参
数见文献
[8]
,其余
9
台同步机均采用经典模型。
对双馈风机转子侧换流器分别采用定电压控制
与定无功功率的控制方式进行分析。并且每一种控制
方式均采用详细模型、忽略网侧变换器的简化模型、
忽略转子磁链暂态的零轴模型以及负阻抗模型:
定无功控制方式:
模型
1
:详细模型;
模型
2
:忽略网侧变换器的控制模型;
模型
3
:零轴模型;
模型
4
:恒定负阻抗模型。
定电压控制方式:
模型
1
:详细模型;
模型
2
:忽略网侧变换器的控制模型;
模型
3
:零轴模型;
模型
4
:恒定负阻抗模型。
Figure 4. Diagram of the 10-machine New-England
图
4.
新英格兰
10
机
39
节点图
Open Access
161
双馈风机不同模型下系统阻尼特性对比分析
下面将不同双馈风机模型分两组进行分析,第一
组为风机采用定无功控制的各种模型加负阻抗模型;
第二组为风机采用定电压控制的各种模型外加负阻
抗模型。
4.1.
三种定无功控制模型与负阻抗模型
在图
4
中,当把
G8
换为双馈风机时,系统还有
9
台同步机,从而有
8
个机电振荡模态。在这四种模
型下,系统的机电振荡模态如图
5
所示,表
1
中给出
了不同机电振荡模态的实部、虚部以及风机转速在各
模态下归一化后的参与量。
Table 1. Oscillation modes of sys tem when the DFIG adopts
constant react ive control
表
1.
定无功控制时不同风机模型下的机电振荡模态
特征值序号
模型
1
模型
2
模型
3
模型
4
参与量
Re
−
0.046
−
0.048
−
0.048
−
0.042
Im 10.782 10.779 10.779 10.810
1
(%)
0.4266 0.4453 0.4453 0.3885
0.0061
Re
−
0.076
−
0.077
−
0.077
−
0.072
Im 9.292 9.290 9.289 9.317
2
(%)
0.8179 0.8288 0.8289 0.7728
0.0082
Re
−
0.027
−
0.029
−
0.028
−
0.024
Im 8.624 8.622 8.622 8.646
3
(%)
0.3131 0.3363 0.3247 0.2776
0.0078
Re
−
0.075
−
0.075
−
0.075
−
0.075
Im 8.031 8.031 8.031 8.032
4
(%)
0.9338 0.9338 0.9338 0.9337
0.0006
Re
−
0.059
−
0.073
−
0.072
−
0.033
Im 7.321 7.297 7.296 7.577
5
(%)
0.8059 1.0004 0.9868 0.4355
0.2930
Re
−
0.062
−
0.062
−
0.062
−
0.062
Im 6.610 6.610 6.610 6.614
6
(%)
0.9379 0.9379 0.9379 0.9374
0.0085
Re
−
0.042
−
0.042
−
0.042
−
0.042
Im 6.225 6.225 6.225 6.225
7
(%)
0.6747 0.6747 0.6747 0.6747
0.0002
Re
−
0.045
−
0.054
−
0.054
−
0.031
Im 3.848 3.824 3.823 4.077
8
(%)
1.1694 1.4120 1.4124 0.7603
1.0000
Figure 5. Oscillation modes of system when the DFIG adopts
constant react ive control
图
5.
风机定无功控制的机电振荡模态
表
1
中,“
Re
”为特征值的实部,“
Im
”表示特
征值的虚部,“
”为该特征值的阻尼比。参与量为
风机的转速与模态之间的参与程度。
从风机的参与上看,风电机组对模态
8
和模态
5
的相对参与量较大,因此与精确模型相比,简化模型
下这两个模态的偏差最大。
从特征值的虚部上看,对模型
2
和模型
3
,特征
值的虚部几乎相同,且与模型 1 差别很小。由于特征
值的虚部表示了振荡的频率,可见使用模型
2
及模型
3
作为精确模型的近似时,计算的振荡频率偏差很小。
而模型
4
则偏差较大,并且其特征值虚部均大于模型
1
的虚部,可见使用模型
4
计算得到的振荡频率略有
上升。
特征值的实部表示了模态的衰减快慢等,从图
5
中可见,使用简化模型
2
和模型
3
,其特征值实部均
较精确模型小。这是由于简化模型
2
和
3
均基于理想
情况而得到,可见简化模型下,计算得到的系统阻尼
有所增强。而使用负阻抗模型则没有定论。
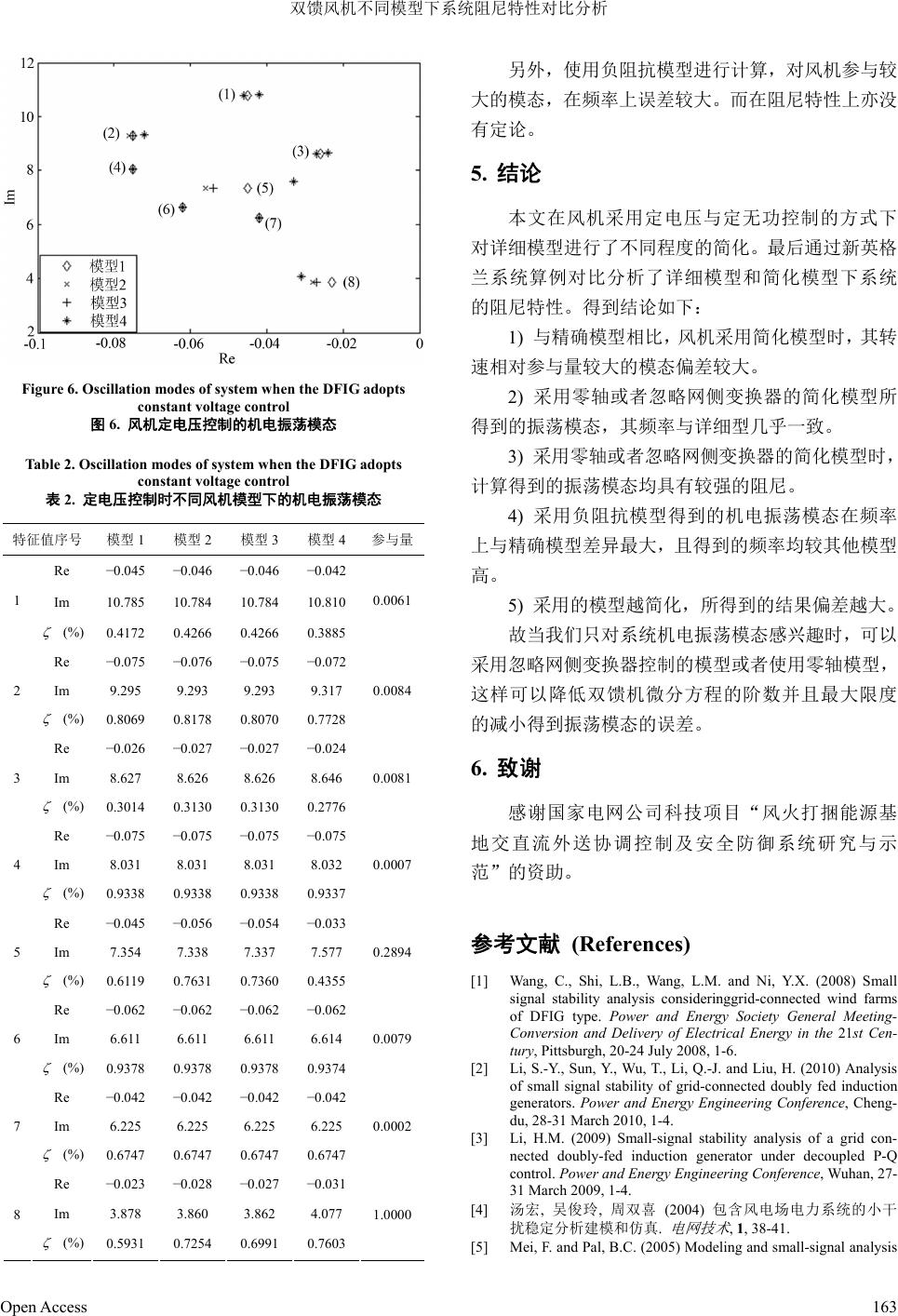
4.2.
三种定电压控制模型与负阻抗模型
在定电压控制的不同模型下,系统的机电振荡模
态如图
6
所示,模态的详细信息见表
2
。
风机采用定电压控制的结论与采用定无功功率
控制的结论大致相同。对风机参与较大的模态,采用
简化模型偏差较大,而使用简化模型
2
以及
3
对其频
率的影响均较小,且由于认为控制器的控制能力理想
化,因此提高了系统的阻尼。
Open Access
162
双馈风机不同模型下系统阻尼特性对比分析
Figure 6. Oscillation modes of system when the DFIG adopts
constant voltage control
图
6.
风机定电压控制的机电振荡模态
Table 2. Oscillation modes of sys tem when the DFIG adopts
constant voltage control
表
2.
定电压控制时不同风机模型下的机电振荡模态
特征值序号
模型
1
模型
2
模型
3
模型
4
参与量
Re
−
0.045
−
0.046
−
0.046
−
0.042
Im 10.785 10.784 10.784 10.810
1
(%)
0.4172 0.4266 0.4266 0.3885
0.0061
Re
−
0.075
−
0.076
−
0.075
−
0.072
Im 9.295 9.293 9.293 9.317 2
(%)
0.8069 0.8178 0.8070 0.7728
0.0084
Re
−
0.026
−
0.027
−
0.027
−
0.024
Im 8.627 8.626 8.626 8.646 3
(%)
0.3014 0.3130 0.3130 0.2776
0.0081
Re
−
0.075
−
0.075
−
0.075
−
0.075
Im 8.031 8.031 8.031 8.032 4
(%)
0.9338 0.9338 0.9338 0.9337
0.0007
Re
−
0.045
−
0.056
−
0.054
−
0.033
Im 7.354 7.338 7.337 7.577 5
(%)
0.6119 0.7631 0.7360 0.4355
0.2894
Re
−
0.062
−
0.062
−
0.062
−
0.062
Im 6.611 6.611 6.611 6.614 6
(%)
0.9378 0.9378 0.9378 0.9374
0.0079
Re
−
0.042
−
0.042
−
0.042
−
0.042
Im 6.225 6.225 6.225 6.225 7
(%)
0.6747 0.6747 0.6747 0.6747
0.0002
Re
−
0.023
−
0.028
−
0.027
−
0.031
Im 3.878 3.860 3.862 4.077
8
(%)
0.5931 0.7254 0.6991 0.7603
1.0000
另外,使用负阻抗模型进行计算,对风机参与较
大的模态,在频率上误差较大。而在阻尼特性上亦没
有定论。
5.
结论
本文在风机采用定电压与定无功控制的方式下
对详细模型进行了不同程度的简化。最后通过新英格
兰系统算例对比分析了详细模型和简化模型下系统
的阻尼特性。得到结论如下:
1)
与精确模型相比,风机采用简化模型时,其转
速相对参与量较大的模态偏差较大。
2)
采用零轴或者忽略网侧变换器的简化模型所
得到的振荡模态,其频率与详细型几乎一致。
3)
采用零轴或者忽略网侧变换器的简化模型时,
计算得到的振荡模态均具有较强的阻尼。
4)
采用负阻抗模型得到的机电振荡模态在频率
上与精确模型差异最大,且得到的频率均较其他模型
高。
5)
采用的模型越简化,所得到的结果偏差越大。
故当我们只对系统机电振荡模态感兴趣时,可以
采用忽略网侧变换器控制的模型或者使用零轴模型,
这样可以降低双馈机微分方程的阶数并且最大限度
的减小得到振荡模态的误差。
6.
致谢
感谢国家电网公司科技项目“风火打捆能源基
地交直流外送协调控制及安全防御系统研究与示
范”的资助。
参考文献
(References)
[1]
Wang, C., Shi, L.B., Wang, L.M. and Ni, Y.X. (2008) Small
signal stability analysis consid
eringgrid-connected wind farms
of DFIG type.
Power and Energy Society General Meeting-
Conversion and Delivery of Electrical Energy in the
21
st Cen-
tury
, Pittsburgh, 20-24 July 2008, 1-6.
[2]
Li, S.-Y., Sun, Y., Wu, T., Li, Q.-J. and Liu, H. (2010) Analysis
of small signal stability of grid-connected doubly fed induction
generators.
Power and Energy Engineering Conference
, Cheng-
du, 28-31 March 2010, 1-4.
[3]
Li, H.M. (2009) Small-signal stability
analysis of a grid con-
nected doubly-fed induction generator under decoupled P-Q
control.
Power and Energy Engineering Conference
,
Wuhan, 27-
31 March 2009, 1-4.
[4]
汤宏
,
吴俊玲
,
周双喜
(2004)
包含风电场电力系统的小干
扰稳定分析建模和仿真
.
电网技术
,
1
, 38-41.
[5]
Mei, F. and Pal, B.C. (2005) Modeling and small-signal analysis
Open Access
163
双馈风机不同模型下系统阻尼特性对比分析
Open Access
164
of a grid connected doubly-fed induction generator.
Power En-
gineering Society General Meeting
, San Francisco, 12-16 June
2005, 2101-2108.
[6]
Rouco, L. and Zamora, J.L. (2006) Dynamic patterns and model
order reduction in small-signal models of doubly fed induction
generators for wind power applications.
Power Engineering So-
ciety General Meeting
, Montreal, 18-22 June 2006, 1-8.
[7]
王忱
,
石立宝
,
姚良忠
,
王黎明
,
倪以信
(2010)
大规模双馈
型风电场的小扰动稳定分析
.
中国电机工程学报
,
4
, 63-70.
[8]
Pena, R., Clare, J.C. and Asher, G.M. (1996) Doubly fed induc-
tion generator using back-to-back PWM converters and its ap-
plication to variable-speed wind-energy generation.
IEE Pro-
ceedings of Electric Power Applications
,
143
, 231-241.
[9]
Dong, B.H., Asgarpor S. and Wei, Q. (2011) ANN-based adap-
tive PI control for wind turbine with doubly fed induction gen-
erator.
North American Power Symposium
(
NAPS
), Boston, 4-6
August 2011, 1-6.
[10]
Painemal, H.A.P. (2010) Wind fa
rm for power system stability
analysis. University of Illinois at Urabana-Champaign, Cham-
paign.
[11]
倪以信
,
陈寿孙
,
张宝霖
(2002)
动态电力系统的理论和分
析
.
清华大学出版社
,
北京
.
[12]
Pai, M.A. (1989) Energy function
analysis for power system sta-
bility. Kluwer Academic Publishers, Boston, 250-252.