设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Artificial Intelligence and
Robotics Research
人工智能与机器人研究
, 201
4
,
3
,
6-10
http://dx.doi.org/10.12677/airr.2014.31002
Published Online
February 2014 (http://www.hanspub.org/journal/airr
.html
)
The Research of Dynamic Obstacle Avoidance on Simulation
Robot Soccer
Jiawei Hu
,
Yong Liu
, Zhao Liu
School of Computer Science and Technology
,
Wu
h
an University of Science
and Technology
, Wu
han
Email:
1106207961@qq.com
Received: Dec. 12
th
, 2013; revised: Jan. 15
th
, 2014; accepted: Jan. 26
th
,
201
4
Copyright © 201
4
Jiawei Hu et al. This is an open access article distributed under the Creative Co mmons Attribution License, which permits unre-
stricted use, distribution, and reproduction in any medium, provided the origin al work is properly cited. In accordance of th e Creative Commons A
t-
tribution License all Cop yrights © 201
4
are reserv ed for Hans and the owner of the intellectual property Jiawei Hu et al
. All Copyright © 201
4
are
guarded by l
aw and by Hans as a guardian.
Abstract:
During the robot soccer game,
it will be easily blocked when attacking because we are not able to
choose a
path to prevent the
collision
with opponent robot in time and
accurately
.
In order to make attack not be blocked easily,
an improved
artificial
potential field
a
lgorithm
is proposed to choose path,
so as to enhance the
efficiency
of the robot
avoiding obstacles
.
It
chooses
the shortest path to reduce the time,
so that it can lay a foundation for building up an a
t-
tack.
T
he
a
lgorithm
improved the
artificial
potential field
by i
ncreasing rotation force
,
so a s to
prevent falling into local
optimal path selection
.
The simulation
experiment
results show
ed
that the algorithm improve
d t
he robot obstacle
avoidance
validity and rationality
,
and
it ma
de
the robot breach more easily.
Keywords:
Robot Soccer;
Artificial Potential Field
;
Dynamic
Obstacle A voidance
动态避障在仿真机器人足球上的研究
胡镓伟,刘
勇,刘
钊
武汉科技大学计算机科学与技术学院,
武汉
Email:
1106207961@qq.com
收稿日期:
2013
年
12
月
12
日;修回日期:
201
4
年
1
月
15
日;录用日期:
201
4
年
1
月
26
日
摘
要:
在机器人足球比赛中,由于不能及时准确的选择一条路径防止和对方机器人碰撞,很容使得进攻受到
阻碍。为使得进攻不容易被阻碍,提出了一种改进的人工势场路径选择算法,以此来增加机器人避开障碍物的
高效性,选择一条最短路径,从而缩短了时间,为组织好进攻打下基础。以往的人工势场方法都容易陷入局部
最优,本算法通过增加旋转力
,
对人工势场方法进行了改进,防止选择的路径陷入局部最优。算法进行了仿真实
验,结果表明该算法提高了机器人避障的有效性和合理性,使得进攻更具有切入性。
关键词:
机器人足球;人工势场;动态避障
1.
引言
机器人足球在人工智能领域是一个具有高可研
究性的项目,目前世界上很多高校和科研机构都对机
器人项目进行了各种研究,而且都取得了不错的效果
并运用于实际应用当中。在对仿真机器人项目上的研
究过程当中,运用各种方法使得机器人的进攻更具威
胁性,配合性和有效性是极为重
要的。目前,各种人
工智能算法,如聚类,
K-
means
,神经网络算法等都
对机器人进攻策略产生了巨大的作用
[1]
。
为使得机器人进攻不容易被截断,选
择一条容易
OPEN ACCESS
6
动态避障在仿真机器人足球上的研究
带球进攻的路线是至关重要
的
[2]
。以往基于人工势场
的方法在选择路径当中具有一定的作用
[3,4]
,但是容易
陷入局部最小值,因此本文提出了一种基于人工势场
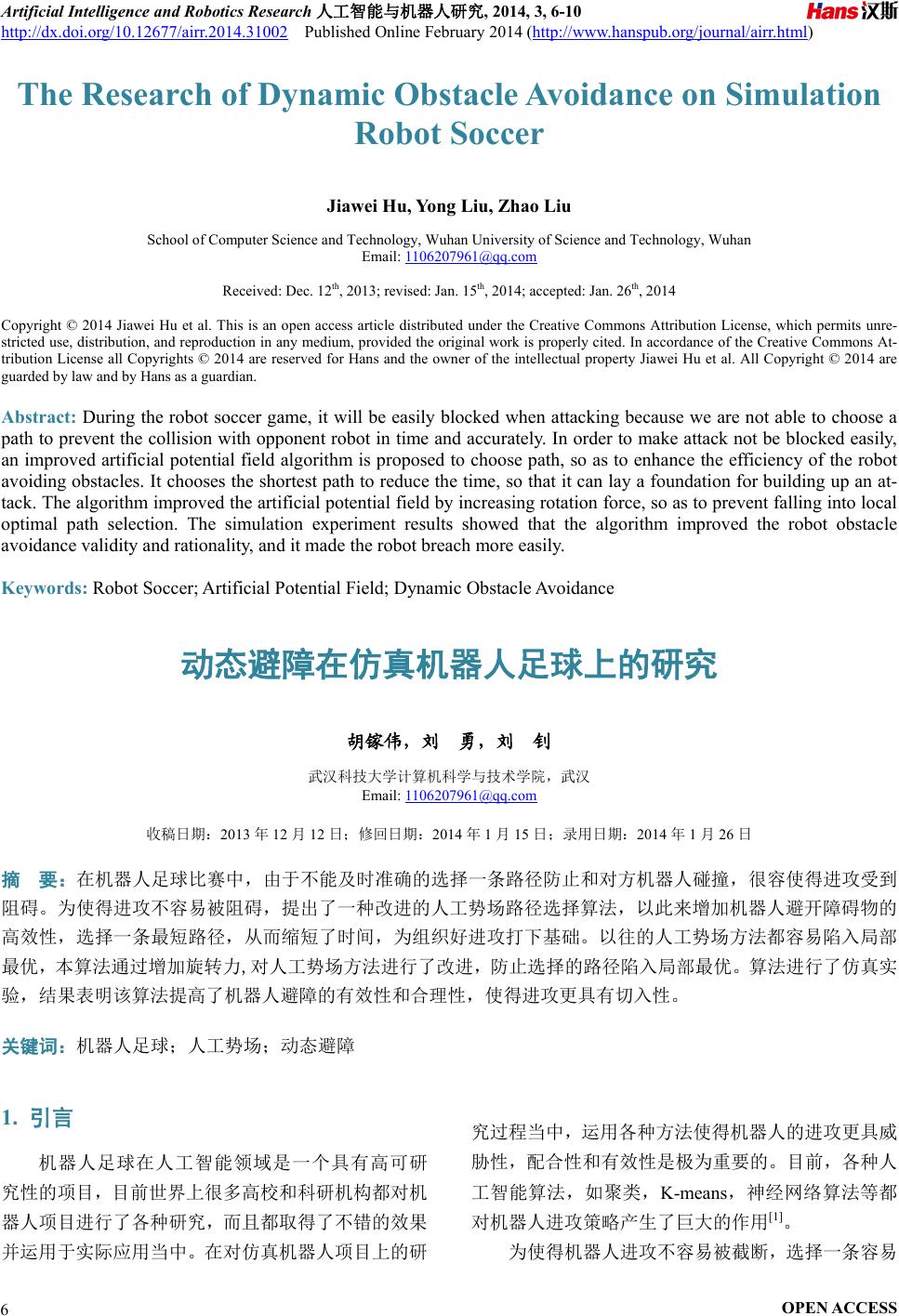
的改进算法,防止所搜索的路线陷入局部最小值。在
实际比赛中,假设机器人所处的位置和要到达的目标
点如图
1
所示,其中
F_out
表示障碍物对我方机器人
的斥力,
F_attract
表示目标点
G
对我方机器人的吸引
力,
F_circle
即为引入的旋转力,防止陷入局部最小值。
人工势场法
是由
Khatbi
提出的一种机器人路径
规划算法。该算法将目标和障碍物分别看做对机器人
有引力和斥力的物体,机器人沿引力与斥力的合力来
进行运动。该法结构简单,便于低层的实时控制,在
实时避障和平滑的轨迹控制方面,得到了广泛应用,
其不足在于存在局部最优解,容易产生死锁现象
[5,6]
,
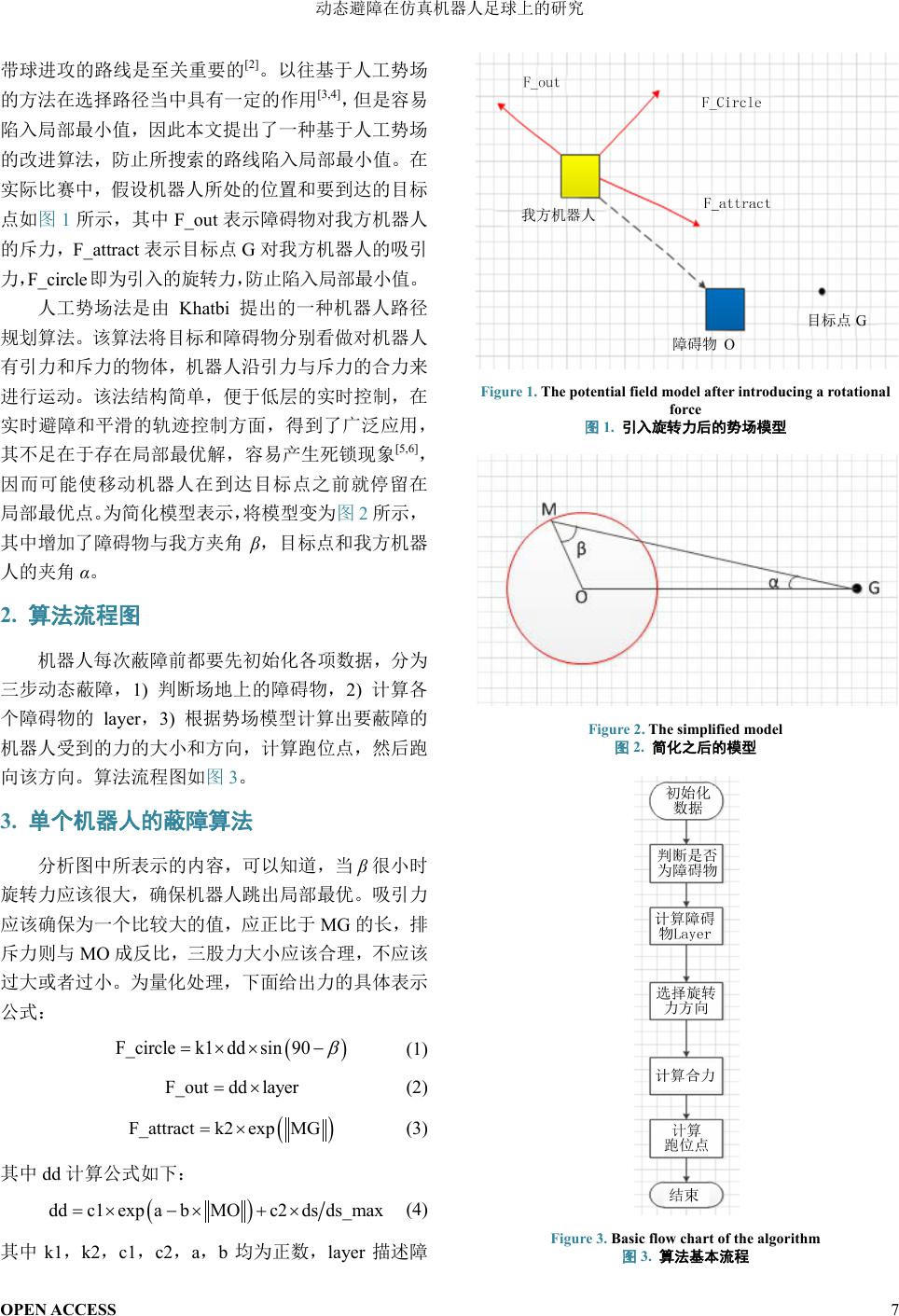
因而可能使移动机器人在到达目标点之前就停留
在
局部最优点。为简化模型表示,将模型变为图
2
所示,
其中增加了障碍物与我方夹角
β
,目标点和我方机器
人的夹角
α
。
2.
算法流程图
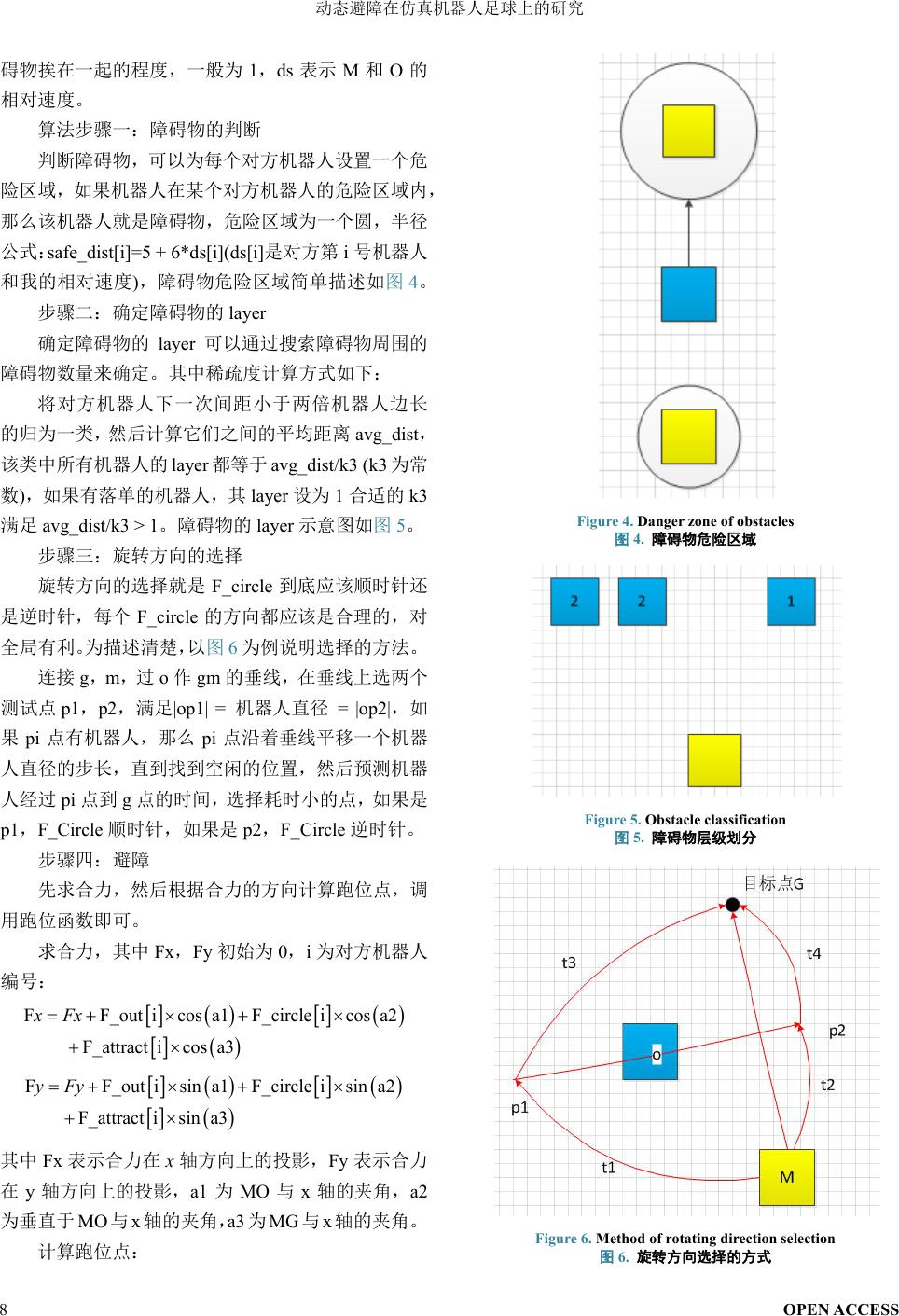
机器人每次蔽障前都要先初始化各项数据,分为
三步动态蔽障,
1)
判断场地上的障碍物,
2)
计算 各
个障碍物的
layer
,
3)
根据势场模型计算出要蔽障的
机器人受到的力的大小和方向,计算跑位点,然后跑
向该方向。算法流程图如图
3
。
3.
单个机器人的蔽障算法
分析图中所表示的内容,可以知道,当
β
很小时
旋转力应该很大,确保机器人跳出局部最优。吸引力
应该确保为一个比较大的值,应正比于
MG
的长,排
斥力则与
MO
成反比,三股力大小应该合理,不应该
过大或者过小。为量化处理,下面给出力的具体表示
公式:
( )
F_circlek1ddsin 90
β
=×× −
(1)
F_outdd layer
= ×
(2)
( )
F_attractk2 expMG
= ×
(3)
其中
dd
计算公式如下:
( )
ddc1expabMOc2ds ds_max
= ×−×+ ×
(4)
其中
k1
,
k2
,
c1
,
c2
,
a
,
b
均为正数,
layer
描述障
Figure 1. The potential field model after introducing a rotational
fo rc e
图
1.
引入旋转力后的势场模型
Figure 2. The simplified model
图
2.
简化之后的模型
Figure 3. Basic flow chart of the algorithm
图
3.
算法基本流程
OPEN ACCESS
7
动态避障在仿真机器人足球上的研究
碍物挨在一起的程度,一般为
1
,
ds
表示
M
和
O
的
相对速度。
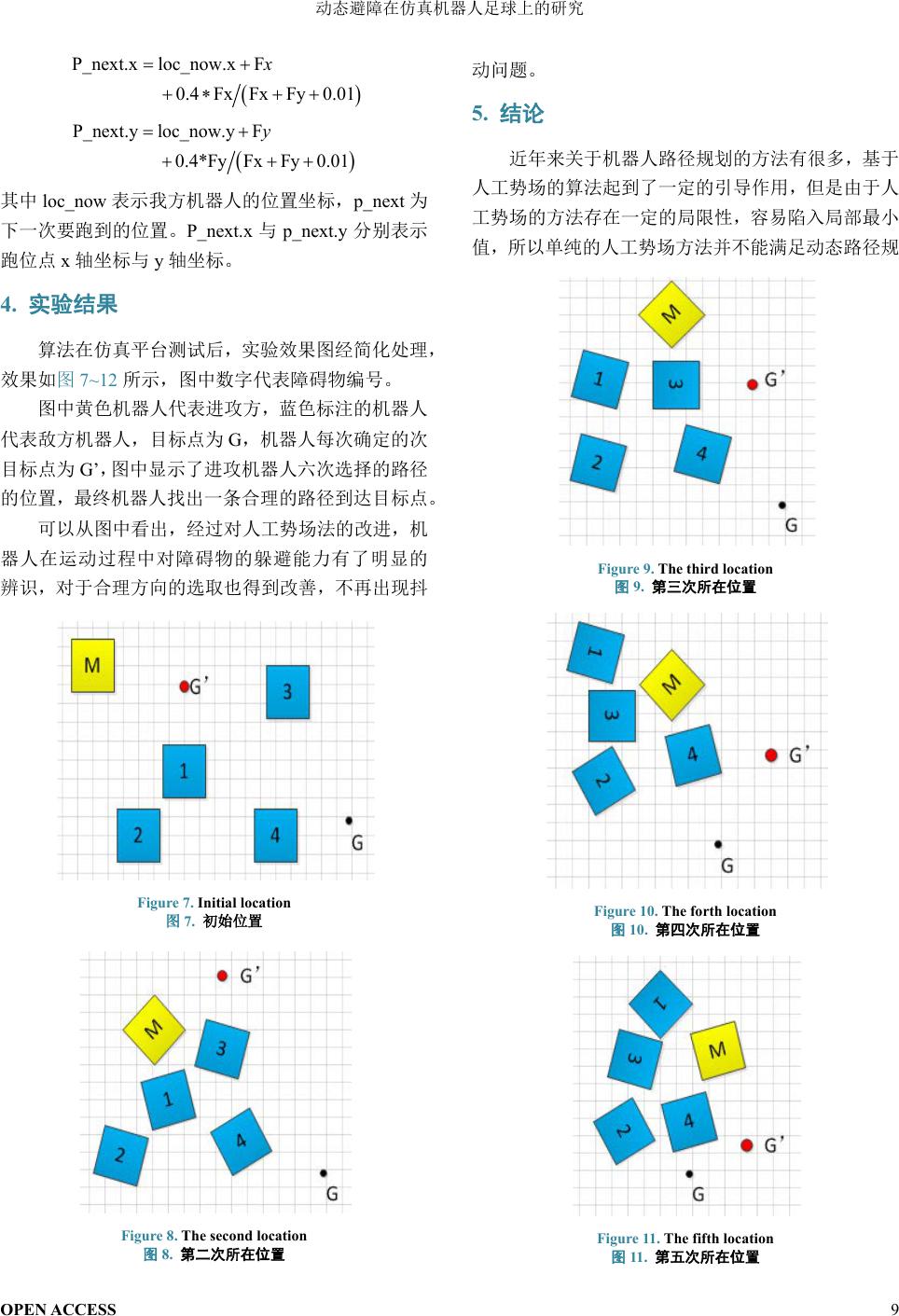
算法步骤一:障碍物的判断
判断障碍物,可以为每个对方机器人设置一个危
险区域,如果机器人在某个对方机器人的危险区域内,
那么该机器人就是障碍物,危险区域为一个圆,半径
公式:
safe_dist[i]=5
+
6*ds[i
](
ds[i]
是对方第
i
号机器人
和我的相对速度
)
,
障碍物危险区域简单描述如
图
4
。
步骤二:确定障碍物的
layer
确定障碍物的
layer
可以通过搜索障碍物周围的
障碍物数量来确定。其中稀疏度计算方式如下:
将对方机器人下一次间距小于两倍机器人边长
的归为一类,然后计算它们之间的平均距离
avg_dist
,
该类中所有机器人的
layer
都等于
avg_dist/k3
(k3
为常
数
)
,如果有落单的机器人,其
layer
设为
1
合适的
k3
满足
avg_dist/k3 > 1
。障碍物的
layer
示意图如图
5
。
步骤三:旋转方向的选择
旋转方向的选择就是
F_circle
到底应该顺时针还
是逆时针,每个
F_circle
的方向都应该是合理的,对
全局有利。为描述清楚,以图
6
为例说明选择的方法。
连接
g
,
m
,过
o
作
gm
的垂线,在垂线上选两个
测试点
p1
,
p2
,满足
|op1|
=
机器人直径
=
|op2|
,如
果
pi
点有机器人,那么
pi
点沿着垂线平移一个机器
人直径的步长,直到找到空闲的位置,然后预测机器
人经过
pi
点到
g
点的时间,选择耗时小的点,如果是
p1
,
F_Circle
顺时针,如果是
p2
,
F_Circle
逆时针。
步骤四:避障
先求合力,然后根据合力的方向计算跑位点,调
用跑位函数即可。
求合力,
其中
Fx
,
Fy
初始为
0
,
i
为对方机器人
编号:
[ ]
( )
[ ]
( )
[ ]
( )
FF_outi cosa1F_circlei cosa2
F_attract icos a3
x Fx
=+ ×+×
+×
[ ]
( )
[ ]
( )
[ ]
( )
FF_outisin a1F_circleisin a2
F_attract isina3
y Fy
=+ ×+×
+×
其中
Fx
表示合力在
x
轴方向上的投影,
Fy
表示合力
在
y
轴方向上的投影,
a1
为
MO
与
x
轴的夹角,
a2
为垂直于
MO
与
x
轴的夹角,
a3
为
MG
与
x
轴的夹角。
计算跑位点:
Figure 4. Danger zone of obstacles
图
4.
障碍物危险区域
Figure 5. Obstacle classification
图
5.
障碍物层级划分
Figure 6. Method of rotating direction selection
图
6.
旋转方向选择的方式
OPEN ACCESS
8
动态避障在仿真机器人足球上的研究
( )
P_next.xloc_now.xF
0.4 FxFxFy0.01
x
= +
+ ∗++
( )
P_next.yloc_now.y F
0.4*Fy FxFy 0.01
y
= +
+ ++
其中
loc_now
表示我方机器人的位置坐标,
p_next
为
下一次要跑到的位置。
P
_next.x
与
p_next.y
分别表示
跑位点
x
轴坐标与
y
轴坐标。
4.
实验结果
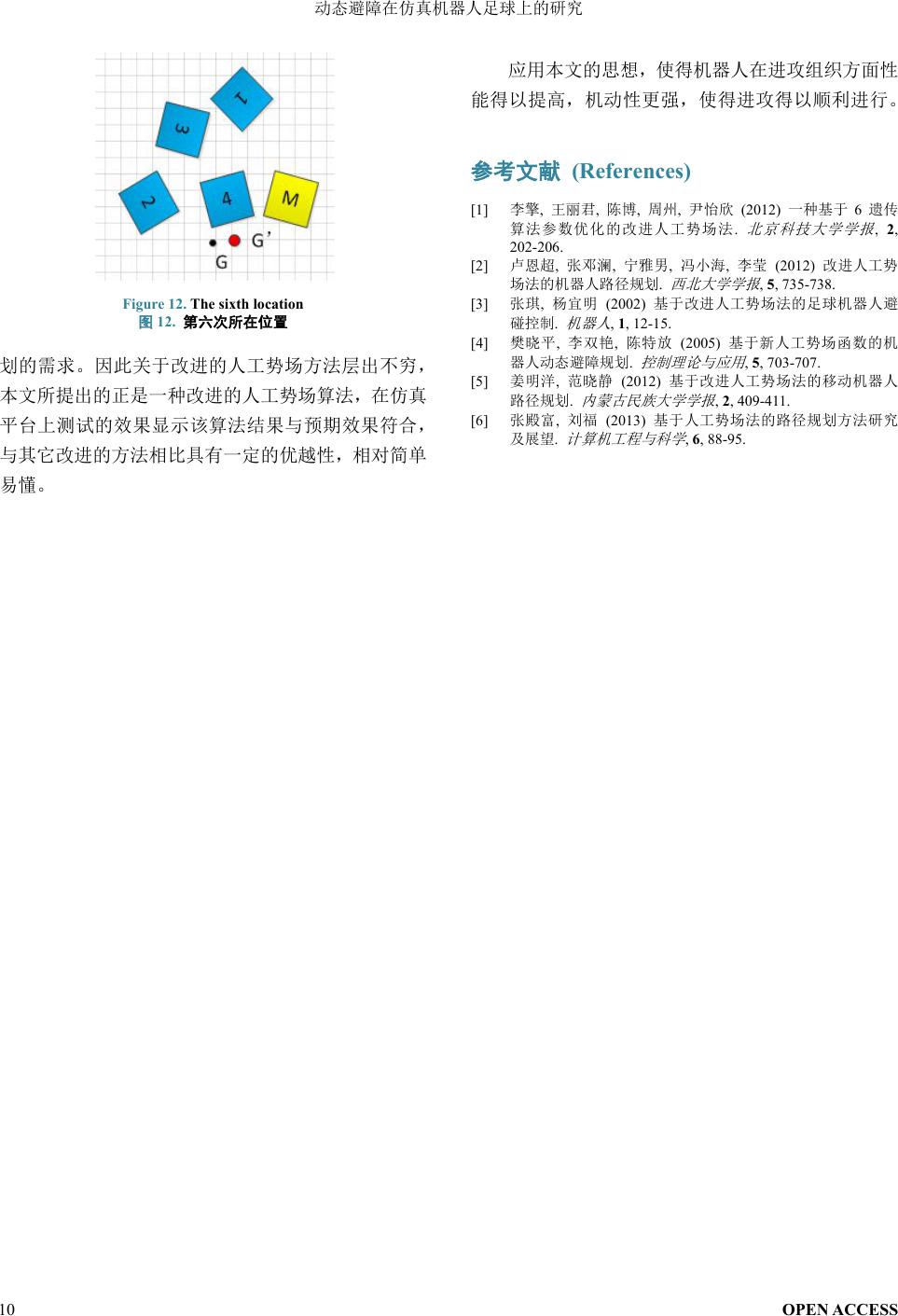
算法在仿真平台测试后,实验效果图经简化处理,
效果如图
7~
12
所示
,图中数字代表障碍物编号。
图中黄色机器人代表进攻方,蓝色标注的机器人
代表敌方机器人,目标点为
G
,机器人每次确定的次
目标点为
G’
,图中显示了进攻机器人六次选择的路径
的位置,最终机器人找出一条合理的路径到达目标点。
可以从图中看出,经过对人工势场法的改进,机
器人在运动过程中对障碍物的躲避能力有了明显的
辨识,对于合理方向的选取也得到改善,不再出现抖
Figure 7. Initial
location
图
7.
初始位置
Figure 8. The second location
图
8.
第二次所在位置
动问题。
5.
结论
近年来关于机器人路径规划的方法有很多,基于
人工势场的算法起到了一定的引导作用,但是由于人
工势场的方法存在一定的局限性,容易陷入局部最小
值,所以单纯的人工势场方法并不能满足动态路径规
Figure 9. The third location
图
9.
第三次所在位置
Figure 10. The forth location
图
10.
第四次所在位置
Figure 11. The fifth location
图
11.
第五次所在位置
OPEN ACCESS
9
动态避障在仿真机器人足球上的研究
Figure 12. The sixth location
图
12.
第六次所在位置
划的需求。因此关于改进的人工势场方法层出不穷,
本文所提出的正是一种改进的人工势场算法,在仿真
平台上测试的效果显示该算法结果与预期效果符合,
与其它改进的方法相比具有一定的优越性,相对简单
易懂。
应用本文的思想,使得机器人在进攻组织方面性
能得以提高,机动性更强,使得进攻得以顺利进行。
参考文献
(References)
[1]
李擎
,
王丽君
,
陈博
,
周州
,
尹怡欣
(2012)
一种基于
6
遗传
算法参数优化的改进人工势场法
.
北京科技大学学报
,
2
,
202
-
206.
[2]
卢恩超
,
张 邓澜
,
宁雅男
,
冯小海
,
李莹
(
2012
)
改进人工势
场法的机器人路径规划
.
西北大学学报
,
5
, 735
-
738
.
[3]
张琪
,
杨宜明
(
2002
)
基于改进人工势场法的足球机器人避
碰控制
.
机器人
,
1
, 12-
15.
[4]
樊晓平
,
李双艳
,
陈特放
(
2005
)
基于新人工势场函数的机
器人动态避障规划
.
控制理论与应用
,
5
, 703
-
707.
[5]
姜明洋
,
范晓静
(
2012
)
基于改进人工势场法的移动机器人
路径规划
.
内蒙古民族大学学报
,
2
,
409
-
411
.
[6]
张殿富
,
刘福
(2013)
基于人工势场法的路径规划方法研究
及展望
.
计算机工程与科学
,
6
, 88
-
95
.
OPEN ACCESS
10