设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Artificial Intelligence and Robotics Research
人工智能与机器人研究
, 201
4
,
3
,
11
-17
http://dx.doi.org/10.12677/airr.2014.31003
Published Online
February 2014 (http://www.hanspub.org/journal/airr
.html
)
The
Study
of Humanoid Robot Gait Stability Based on Fuzzy
Control Method
Yuchao
Lu, Kecun
Jin, Yu
tian
Liu
*
School of Information and Elec tron
,
Zhejiang Wanli University, Ningbo
Email:
*
lyt808@163.com
Received: Jan. 8
th
, 2014; revised: Feb. 2
nd
, 2014; accepted: Feb. 10
th
,
201
4
Copyright © 201
4
Yuchao Lu et al.
This is an op en access article distributed under the Creative Co mmons Attribution License, which permits unre-
stricted use, distribution, and reproduction in any medium, provided the origin al work is properly cited. In accordance of th e Creative Commons A
t-
tribution License all Copyrights © 2 01
4
are reserved for Hans and the owner of the intellectual pro perty Yuchao Lu et al.
All Copyright © 201
4 are
guarded by l
aw and by Hans as a guardian.
Abstract:
The unforeseen disturbance will cause the instability du
ring the process of humanoid robot
’
s
walking
. So, a
gait stability control method bas
ed on fuzzy control is proposed
, and
the purpose is to enhance the anti
-
interference
performance of humanoid robot. Implemented in MF
(Metal Fight) humanoid robot, the proposed method accomplishes
the gait planning along the reference trajectory and through the
method
, we obtain the walking joint parameters w hich
are used to control the humanoid robot. In more detail, firstly, to classify ranks for the disturbances according to the
disturbance severity which may reduce the stability margin of the robot
.
Second ly, the joint parameters can be adjusted
through fuzzy logic control. Thirdly, to
control
the gait stability by adjusting the stabi
lity margin within the excepted
value. The experiment results show that this method can effectively get over
the unknown environment i mpact of inte
r-
ference on the rob ot
.
Keywords:
Humanoid Robot
;
Gait Planning
;
Stability Margin
;
Fuzzy Control
基于模糊控制的仿人机器人步态稳定性研究
陆宇超,金珂存,柳玉甜
*
浙江万里学院电子与信息学院,宁波
Email:
*
lyt808@163.com
收稿日期:
201
4
年
1
月
8
日;修回日期:
201
4
年
2
月
2
日;录用日期:
201
4
年
2
月
10
日
摘
要:
仿人机器人在步行过程中会遇到不可预见的干扰而导致机器人不能稳定的行走。因此,本文提出一种
模糊控制的方法调整机器人走路姿态以增加步行的抗干扰性。该方法以
MF
(Metal Fight)
仿人机器人为对象,用
参考轨迹的方法对机器人进行步态规划,得到保证机器人稳定的步行关节参数;针对步行过程中出现的干扰使
机器人稳定裕度降低的情况,先根据干扰对机器人稳定裕度的影响程度进行分级,然后通过模糊逻辑调整机器
人双足的关节参数,最终使稳定裕度回归期望值,从而实现对步态稳定性的控制。实验结果表明该方法能有效
的克服环境中未知干扰对机器人步行的影响。
关键词:
仿人机器人;步态规划;稳定裕度;模糊控制
1.
引言
稳定行走是仿人机器人实现其他功能的前提和
基础,是仿人机器人技术研究的重点
[1]
。其中步态规
划是步行过程中最重要的一环,目前常见的步态规划
方法有两类:第一类是反馈式步态规划方法
[2]
,该类
*
通讯作者。
OPEN ACCESS
11
基于模糊控制的仿人机器人步态稳定性研究
方法主要通过传感器收集仿人机器人各关节数据实
时地控制机器人稳定行走,如用于
ASIMO
等仿人机
器人上的基于连杆模型的步态规划方法
[3]
、用于仿人
机器人
HRP
-2
,
NAO
等稳定步态控制的基于倒立摆
模型的步态规划方法等
[4]
;该类方法不足之处在于算
法实现对机器人硬件结构和系统模型有很高的要求,
采用的控制方法较为复杂。第二类是非反馈式静态步
态规划方法,该类方法假定在一系列物理环境和仿人
机器人动力学模型的基础上实现人工规划步态。该类
方法应用广泛,其优点是对硬件结构的要求很低,数
学模型相对简单,主要应用于小型仿人机器人
的步态
规划。但在有干扰作用的情况下,非反馈静态步态规
划的稳定性就无法得到保障。
针对上述两类方法中存在的问题,本文提出一种新
的基于模糊控制的步态规划方法。所提出的方法在根据
完成步态规划后确定的参考轨迹来测算其前后左右摆
幅的稳定域值,利用姿态传感器数据作为反馈参数,计
算出其稳定裕度。当有干扰出现时,采用模糊控制的方
法对走路位姿进行调整,实现若干个周期后回到稳定状
态。该方法减少了对硬件的依赖,不需要复杂的机器人
系统模型,是一种通用的准动态步行规划。
2.
静态步行分析
仿人机器人的步态规划,就是对机器人行走过程
中各部分运动轨迹的规划,例如双脚在行走过程中的
轨迹。其中静态的步行规划,是指机器人在步行的每
一时刻都处于静态平衡。该方法符合
ZMP
理论,能
规划出稳定的步态。
2.1.
五点规划法
在环境不变的情况下,仿人机器人的步行是一个
周期性运动。因此根据一个步行周期内的关键时刻点,
利用三次样条函数在这些关键点之间进行插值生成
连续光滑的轨迹曲线,可以实现对步态有效的规划,
并且稳定
[5]
。以
MF
机器人为例进行说明,其连杆模
型如图
1
所示。
之前的很多研究对摆脚的规划采用三点式,即起
步,摆脚最高点时刻,落地这三个点作为关键点,来
描述摆脚的运动轨迹。五点规划法则是在起点和中间
点,中间点和落脚点在植入两个点,此规划法结构简
单,轨迹变化相对光滑连续,通过设计起点与中间点
Figure 1. The MF robot connecting rod model
图
1.
MF
机器人连杆模型
的时间间隔,可以减少摆脚与地面相互作用力对稳定
性产生的影响。设计中间点与落脚点的时间间隔,可
以降低摆脚落地的时间,减小与地面接触的碰撞力,
达到更好的落地角度和效果。
2.2.
步行干扰分析
大部分小型仿人机器人的步行控制系统是一个
开环控制系统,无论在规划步态时留有多么大的稳定
裕度,因为没有反馈信息,且采用循环设计的方法,
会导致在有干扰作用的情况下,若干个周期后就会出
现步行失败的现象。而干扰最容易发生在机器人脚掌
和地面接触时刻,例如在行走过程中,地面不平整会
出现下列情况
(
如图
2
所示
)
。
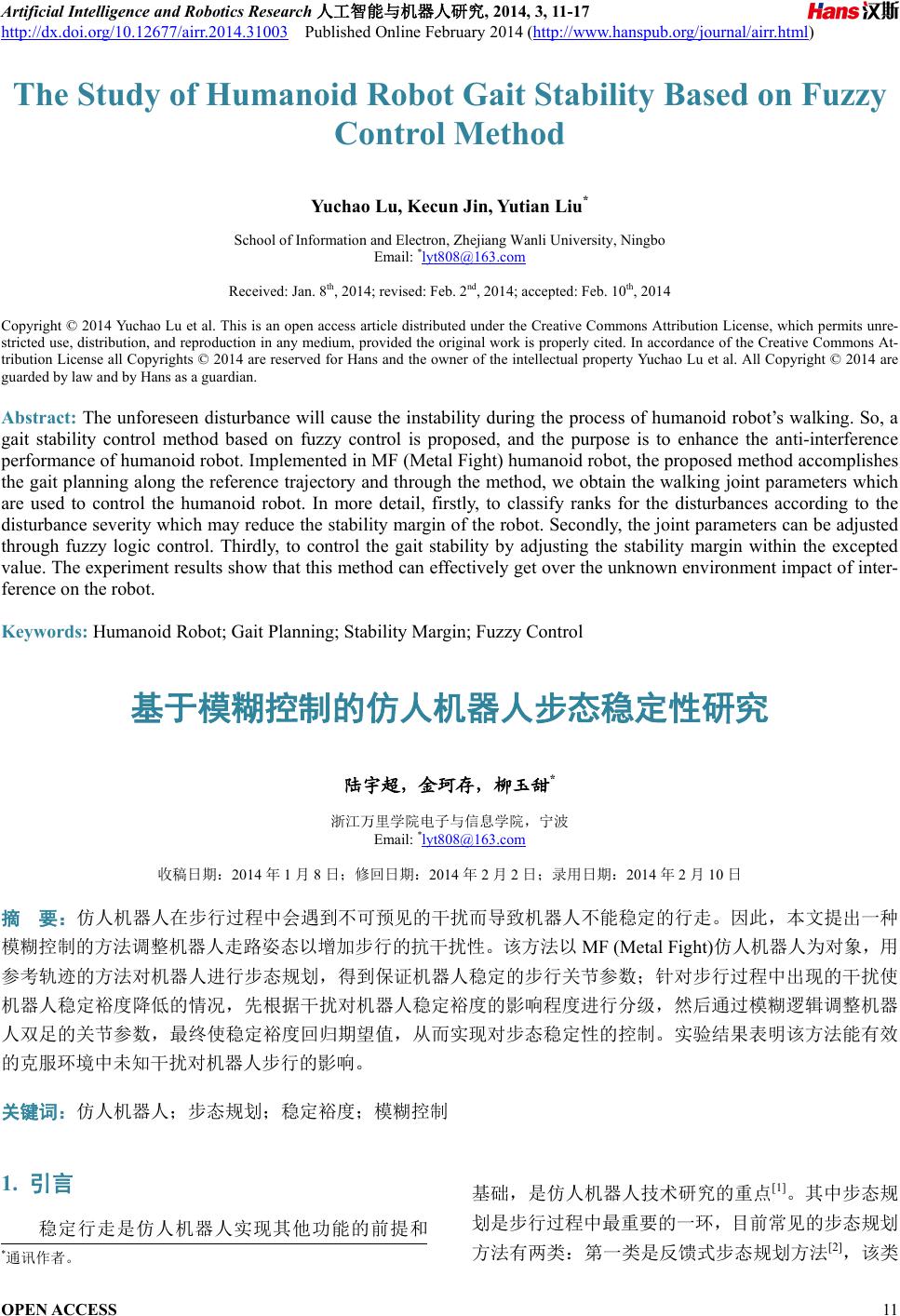
图
3
显示的是图
2
的轨迹变化曲线,图中可见在
d
时刻出现前脚跟欠驱动相,在下一刻重心转移时就
会产生轨迹突变,这样的轨迹会对后面的行走产生很
大的影响,是我们不希望发生的。文献
[6]
对有脚双足
机器人在正常平地前向步行的情况下,与地面接触时
也会出现脚跟,脚尖欠驱动等情况进行了详细的阐述。
2.3.
步态稳定性分析
针对上述问题,根据不同的干扰对机器人稳定性
的影响,将机器人受到外界干扰作用下的不稳定状态
细分为扰动不稳定、一般不稳定、很不稳定、无法稳
定
4
个子状态。当机器人出现不稳定状态时,希望通
过调节走路姿态使机器人重新恢复到稳定状态。调节
思路如图
4
所示
。
图
4
中实线表示本文中所采用的转换方式,虚线
表示现有常见的一些跨越式的转换方式。通过所提出
OPEN ACCESS
12
基于模糊控制的仿人机器人步态稳定性研究
(a) (b) (c) (d)
Figure 2. Under the road uneven analysis on walking
图
2.
路面不平整下的步行分析
Figure 3. The center of gravity trajectory
图
3.
重心轨迹变化
Figure 4. State transition trends
图
4.
状态转换趋势
的调整方式,机器人通过一定的调整后由不稳定状态
向稳定状态转换。在设计中我们希望重心变化轨迹是
连续的,是连贯性调节,实现高阶不稳定向低阶逐步
转换因此转换趋势要具备柔和性。从稳定性的角度考
虑,跨越式调节不利于稳定。譬如,当机器人处于很
不稳定状态时,通过调整位姿参数使其先转换成一般
不稳定,再趋向扰动稳定,最后达到稳定状态,逐步
转换,这样调整方式更符合人类的行走特性。
3.
实时稳定裕度检测
MF
机器人上身装有二维陀螺仪,可以检测到身
体前后,左右摆动的角度值。将机器人简化为一个三
维倒立摆模型可知,机器人的躯干是集中了所有质量
的质点
[7
,8]
,因此陀螺仪检测的到摆动角度可以转换为
质心的
角度
,该角度能反映系统的稳定裕度。本文中
利用图
5
所示模型计算该角度。
图
5
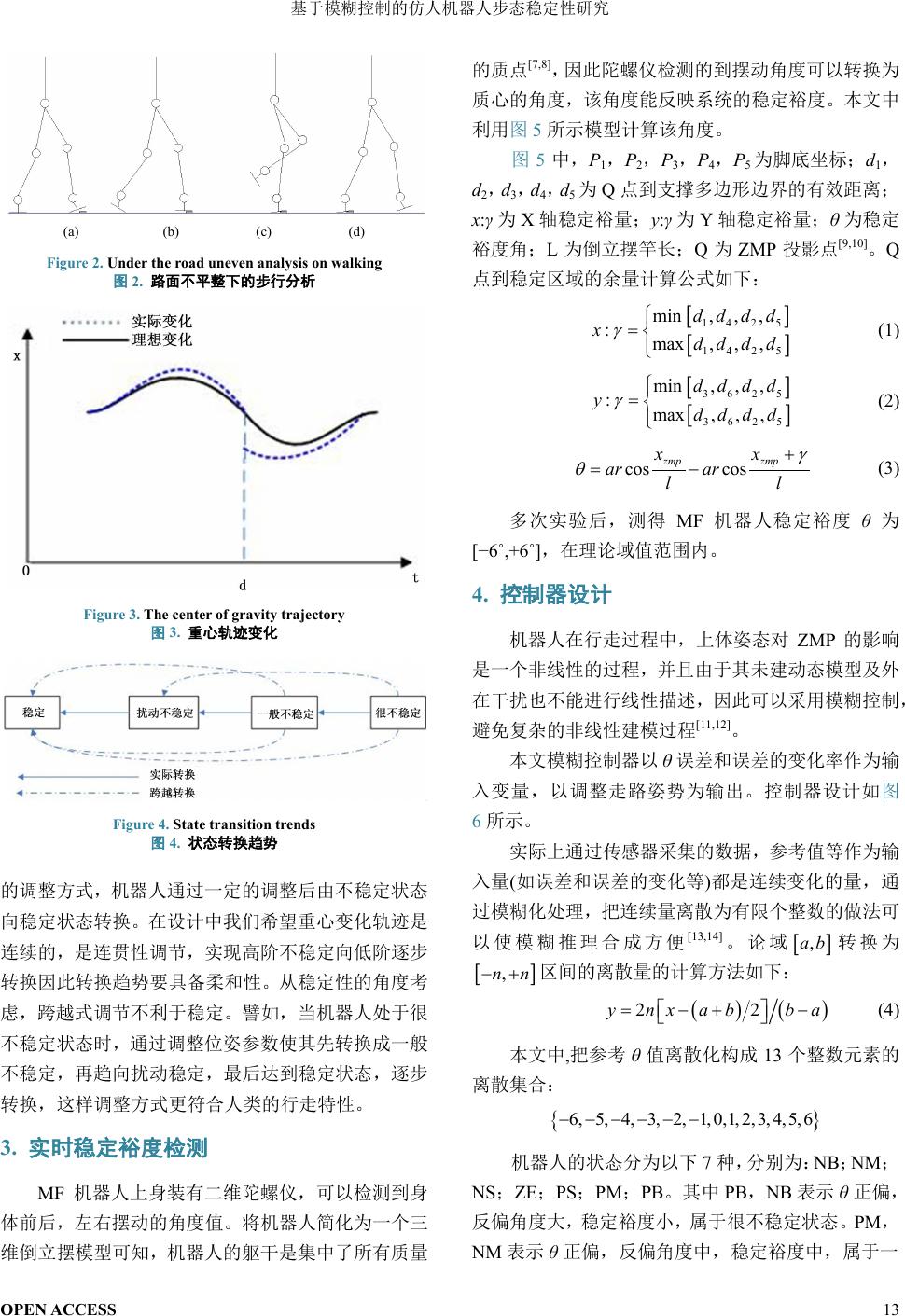
中,
P
1
,
P
2
,
P
3
,
P
4
,
P
5
为脚底坐标;
d
1
,
d
2
,
d
3
,
d
4
,
d
5
为
Q
点到支撑多边形边界的有效距离;
x
:
γ
为
X
轴稳定裕量;
y
:
γ
为
Y
轴稳定裕量;
θ
为稳定
裕度角;
L
为倒立摆竿长;
Q
为
ZMP
投影点
[9
,10]
。
Q
点到稳定区域的余量计算公式如下:
[ ]
[ ]
142 5
142 5
min ,,,
:
max ,,,
dddd
x
dddd
γ
=
(1)
[ ]
[ ]
36 2 5
36 2 5
min, , ,
:
max, , ,
dd dd
y
dd dd
γ
=
(2)
cos cos
zmp zmp
xx
ar ar
ll
γ
θ
+
= −
(3)
多次实验后,测得
MF
机器人稳定裕度
θ
为
[
−
6
˚
,+6
˚
]
,在理论域值范围内。
4.
控制器设计
机器人在行走过程中,上体姿态对
ZMP
的影响
是一个非线性的过程,并且由于其未建动态模型及外
在干扰也不能进行线性描述,因此可以采用模糊控制,
避免复杂的非线性建模过程
[11
,12]
。
本文模糊控制器以
θ
误差和误差的变化率作为输
入变量,以调整走路姿势为输出。控制器设计如
图
6
所示
。
实际上通过传感器采集的数据,参考值等作为输
入量
(
如误差和误差的变化等
)
都是连续变化的量,通
过模糊化处理,把连续量离散为有限个整数的做法可
以使模糊推理合成方便
[13,14]
。论域
[ ]
,
ab
转换为
[ ]
,
nn
−+
区间的离散量的计算方法如下:
() ()
22
ynx abba
= −+−
(4)
本文中
,
把参考
θ
值离散化构成
13
个整数元素的
离散集合:
{ }
6, 5, 4, 3, 2, 1,0,1,2,3,4,5,6
−−−−−−
机器人的状态分为以下
7
种,分别为
:
NB
;
NM
;
NS
;
ZE
;
PS
;
PM
;
PB
。其中
PB
,
NB
表示
θ
正偏,
反偏角度大,稳定裕度小,属于很不稳定状态。
PM
,
NM
表示
θ
正偏,反偏角度中,稳定裕度中,属于一
OPEN ACCESS
13
基于模糊控制的仿人机器人步态稳定性研究
Figure 5. The stability margin calculation model
图
5.
稳定裕度计算模型
Figure
6.
The stability margin compensation controller
图
6.
稳定裕度补偿控制器
般不稳定状态。
PS
,
NS
表示
θ
正偏,反偏角度小,
稳定裕度大,属于扰动不稳定 。
ZE
表 示系统属于 稳
定状态。根据论域可以得到输入两个变量时的控制规
则如表
1
:
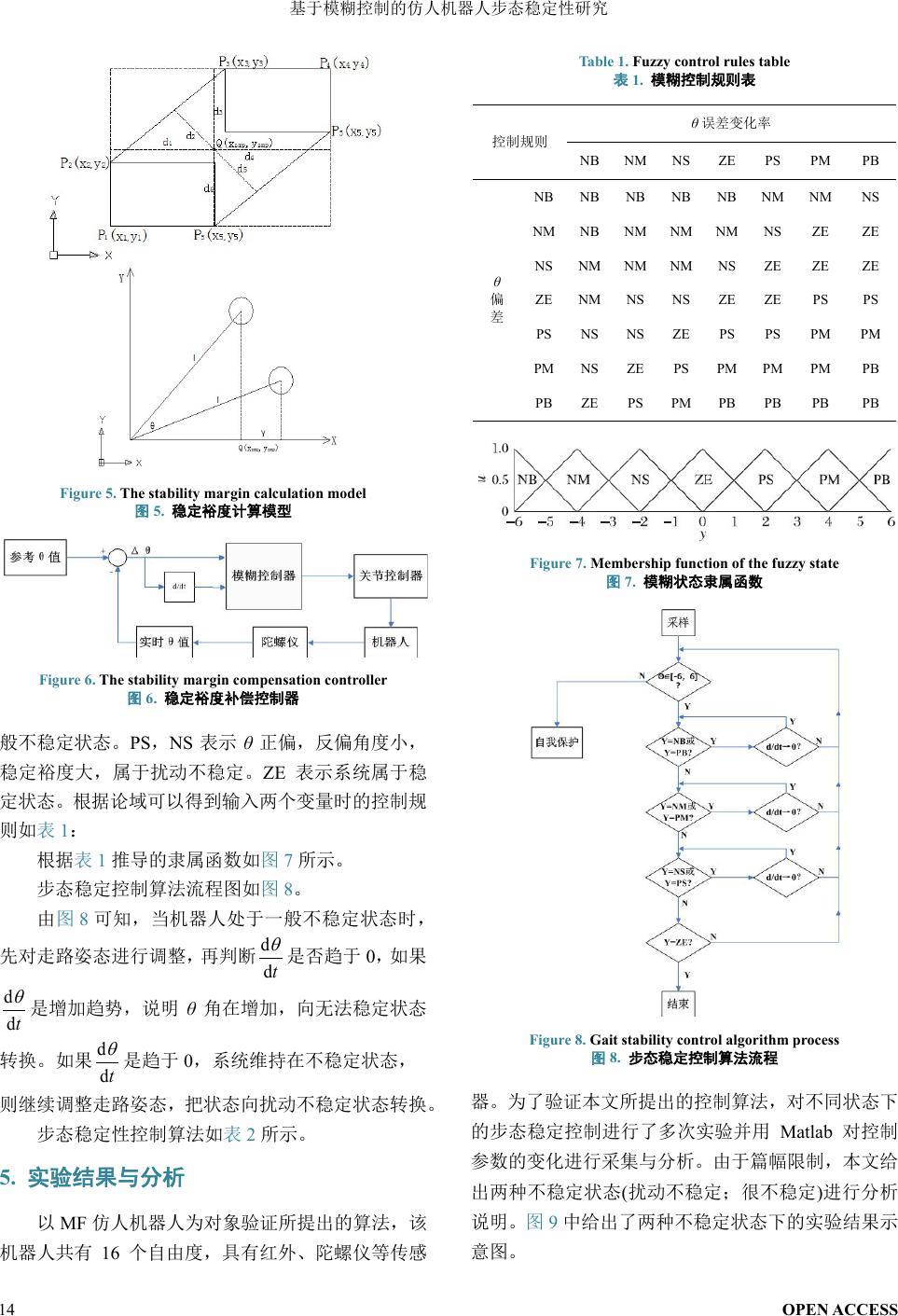
根据表
1
推导的隶属函数如图
7
所示。
步态稳定控制算法流程图如图
8
。
由图
8
可知,当机器人处于一
般不稳定状态时,
先对走路姿态进行调整,再判断
d
d
t
θ
是否趋于
0
,如 果
d
d
t
θ
是增加趋势,说明
θ
角在增加,向无法稳定状态
转换。如果
d
d
t
θ
是趋于
0
,系统维持在不稳定状态,
则继续调整走路姿态,把状态向扰动不稳定状态转换。
步态稳定性控制算法如表
2
所示。
5.
实验结果与分析
以
MF
仿人机器人为对象验证所提出的
算法,该
机器人共有
16
个自由度,具有红外、陀螺仪等传感
Table 1.
Fuzzy control rules table
表
1.
模糊控制规则表
控制规则
θ
误差变化率
NB
NM
NS
ZE
PS
PM
PB
θ
偏
差
NB
NB
NB
NB
NB
NM
NM
NS
NM
NB
NM
NM
NM
NS
ZE
ZE
NS
NM
NM
NM
NS
ZE
ZE
ZE
ZE
NM
NS
NS
ZE
ZE
PS
PS
PS
NS
NS
ZE
PS
PS
PM
PM
PM
NS
ZE
PS
PM
PM
PM
PB
PB
ZE
PS
PM
PB
PB
PB
PB
Figure 7. Membership function of the fuzzy state
图
7.
模糊状态隶属函数
Figure
8.
Gait stability control algorithm process
图
8.
步态稳定控制算法流程
器。为了验证本文所提出的控制算法,对不同状态下
的步态稳定控制进行了多次实验并用
Matlab
对控制
参数的变化进行采集与分析。由于篇幅限制,本文给
出两种不稳定状态
(
扰动不稳定;很不稳定
)
进行分析
说明。
图
9
中给出了两种不稳定状态下的实验结果示
意图。
OPEN ACCESS
14
基于模糊控制的仿人机器人步态稳定性研究
Table
2.
Gait stability control algorithm
表
2.
步态稳定性控制算法
初始化
MF
仿人机器人的运动参数
for k=1 to m axsteps do
计算
k
时刻的
θ
k
if ((
θ
>
−
6)||(
θ
<
6))
仿人机器人的稳定性处于可控制状
态,判断其不稳定状态。
if ( y
=
NB or y
=
PB)
仿人机器人处于很不稳定状态,进入姿态
控制模块。
else if
(y =
NM or y =
PM)
仿人机器人处于一般不稳定状态,
进入姿态控制模块。
else if
(y
=
NS or y
=
PS)
仿人机器人处于扰动不状
态,进入姿态控制模块。
else if (y
= ZE)
仿人机器人处于稳定状态。
end if
end if
end if
end if
end if
end for k
=
1 to maxsteps
if(d/dt
趋于
0)
仿人机器人处于稳定状态
else
不在可控制范围内,进行自我保护。
end if
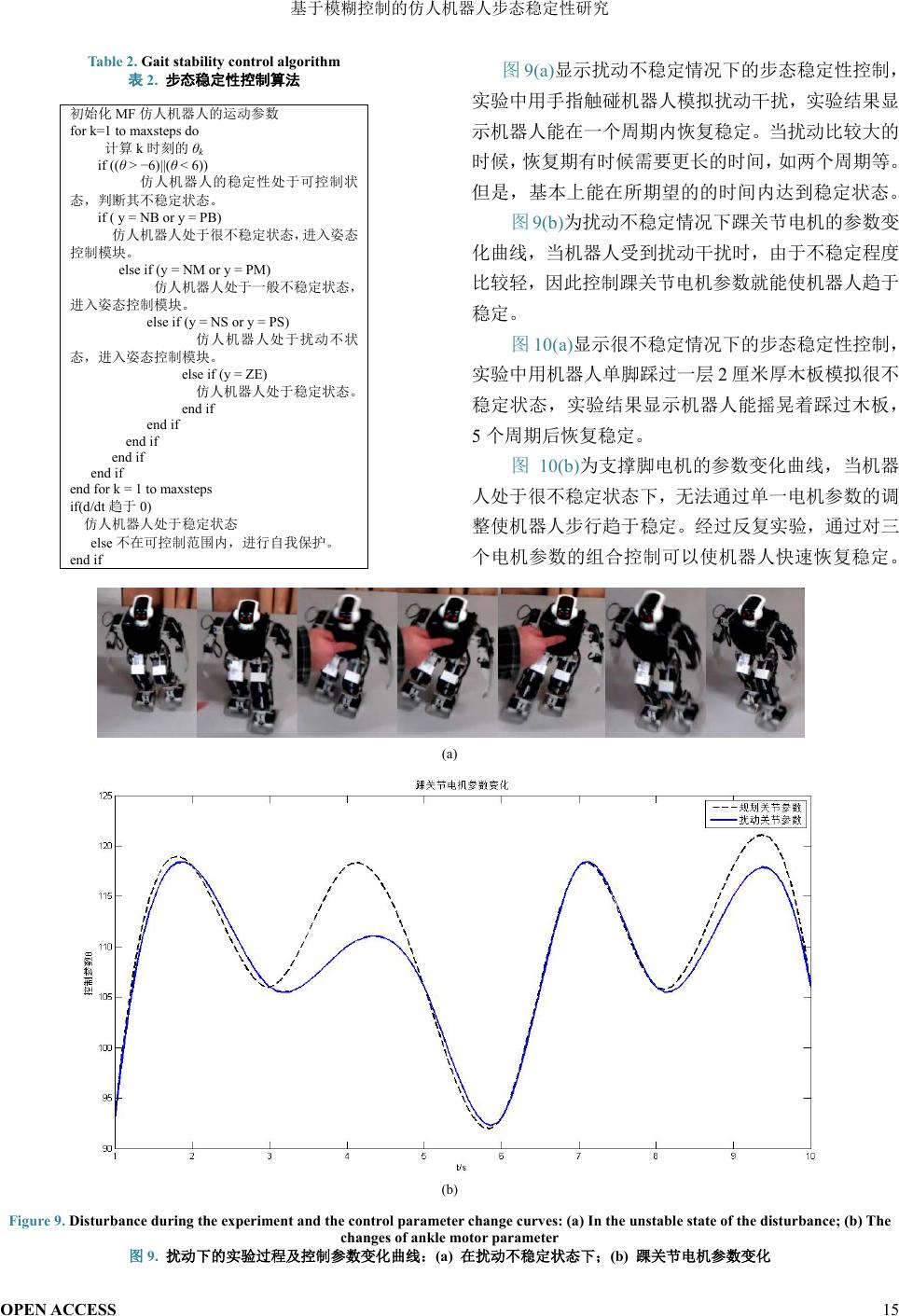
图
9(a)
显示扰动不稳定情况下的步态稳定性控制,
实验中用手指触碰机器人模拟扰动干扰,实验结果显
示机器人能在一个周期内恢复稳定。当扰动比较大的
时候,恢复期有时候需要更长的时间,如两个周期等。
但是,基本上能在所期望的的时间内达到稳定状态。
图
9(b)
为扰动不稳定情况下踝关节电机的参数变
化曲线,当机器人受到扰动干扰时,由于不稳定程度
比较轻,因此控制踝关节电机参数就能使机器人趋于
稳定。
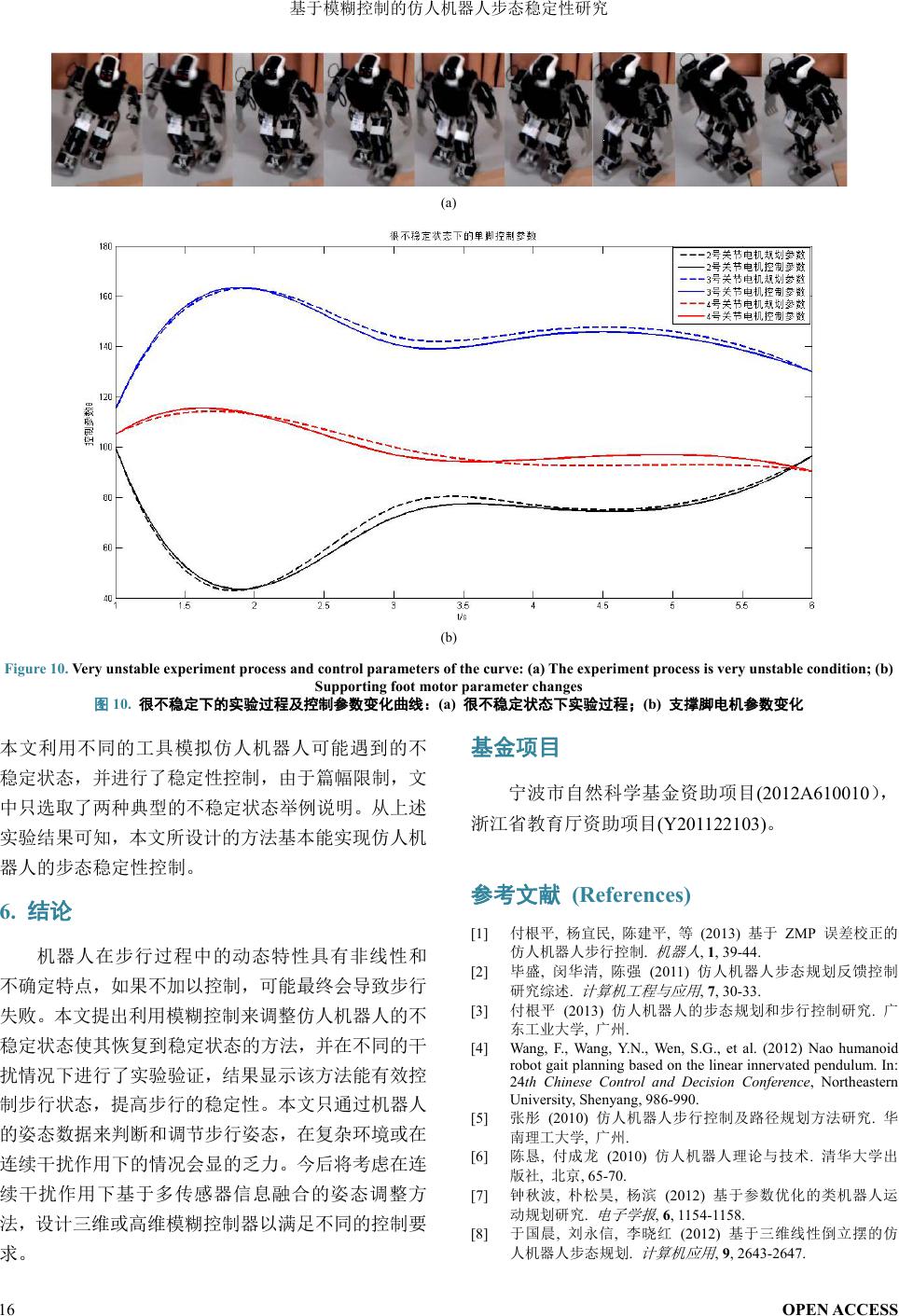
图
10(a)
显示很不稳定情况下的步态稳定性控制,
实验中用机器人单脚踩过一层
2
厘米厚木板模拟很不
稳定状态,实验结果显示机器人能摇晃着踩过木板,
5
个周期后恢复稳定。
图
10(b)
为支撑脚电机的参数变化曲线,当机器
人处于很不稳定状态下,无法通过单一电机参数的调
整使机器人步行趋于稳定。经过反复实验,通过对三
个电机参数的组合控制可以使机器人快速恢复稳定。
(a)
(b)
Figure
9.
Disturbance during the experiment and the control parameter change curves: (a) In the unstable state of the disturbance
;
(b) The
changes of ankle motor parameter
图
9.
扰动下的实验过程及控制参数变化曲线:
(a)
在扰动不稳定状态下;
(b)
踝关节电机参数变化
OPEN ACCESS
15
基于模糊控制的仿人机器人步态稳定性研究
(a)
(b)
Figure 10. Very unstable experiment process and control parameters of the curve: (a) The experiment process is very unstable condition
; (b)
Supporting foot motor parameter changes
图
10.
很不稳定下的实验过程及控制参数变化曲线
:
(a)
很不稳定状态下实验过程
;
(b)
支撑脚电机参数变化
本文利用不同的工具模拟仿人机器人可能遇到的不
稳定状态,并进行了稳定性控制,由于篇幅限制,文
中只选取了两种典型的不稳定状态举例说明。从上述
实验结果可知,本文所设计的方法基本能实现仿人机
器人的步态稳定性控制。
6.
结论
机器人在步行过程中的动态特性具有非线性和
不确定特点,如果不加以控制,可能最终会导致步行
失败。本文提出利用模糊控制来调整仿人机器人的不
稳定状态使其恢复到稳定状态的方法,并在不同的干
扰情况下进行了实验验证,结果显示该方法能有效控
制步行状态,提高步行的稳定性。本文只通过机器人
的姿态数据来判断和调节步行姿态,在复杂环境或在
连续干扰作用下的情况会显的乏力。今后将考虑在连
续干扰作用下基于多传感器信息融合的姿态调整方
法,设计三维或高维模糊控制器以满足不同的控制要
求。
基金项目
宁波市自然科学基金资助项目
(
2012
A610
010
),
浙江省教育厅资助项目
(Y201122103)
。
参考文献
(References)
[1]
付根平
,
杨宜民
,
陈建平
,
等
(
2013
)
基于
ZMP
误差校正的
仿人机器人步行控制
.
机器人
,
1
, 39
-
44
.
[2]
毕盛
,
闵华清
,
陈强
(
2011
)
仿人机器人步态规划反馈控制
研究综述
.
计算机工程与应用
,
7
,
30
-
33.
[3]
付根平
(
2013
)
仿人机器人的步态规划和步行控制研究
.
广
东工业大学
,
广州
.
[4]
Wang,
F.,
Wang,
Y.N
.,
Wen
, S.G
.,
et al.
(
2012
)
Nao
humanoid
robot gait planning based on the
linear innervated pendulum
.
In:
24
th Chinese Control and Decision Conference
, Northeastern
University, Sheny
ang, 986
-
990
.
[5]
张彤
(
2010
)
仿人机器人步行控制及路径规划方法研究
.
华
南理工大学
,
广州
.
[6]
陈恳
,
付成龙
(
2010
)
仿人机器人理论与技术
.
清华大学出
版社
,
北京
,
65
-
70.
[7]
钟秋波
,
朴松昊
,
杨滨
(
2012
)
基于参数优化的类机器人运
动规划研究
.
电子学报
,
6
,
1154
-
1158.
[8]
于国晨
,
刘永信
,
李晓红
(
2012
)
基于三维线性倒立摆的仿
人机器人步态规划
.
计算机应用
,
9
,
2643
-
2647.
OPEN ACCESS
16
基于模糊控制的仿人机器人步态稳定性研究
[9]
梶田秀司
,
著
,
管贻生
,
译
(
2007
)
仿人机器人
.
清华大学出
版社
,
北京
.
[10]
詹剑波
(
2013
)
仿人机器人运动控制和在线落脚点调整
.
浙
江大学
,
杭州
.
[11]
陈磊
,
张国良
,
张维平
,
敬斌
(2013)
基于模糊控制的仿人机
器人零力矩点在线调整
.
计算机应用
,
S1
, 298
-
300.
[12]
Zhong
, Q.-B
. and
Lu
, Y.-C. (
2012
)
Research on gait plan ning of
humanoid robot based on arm motion.
Journal of Harbin Inst
i-
tute of Technology
(
New Series
),
19
, 13-
16
.
[13]
李士勇
(
2011
)
模糊控制
.
哈尔滨工业大学出版社
,
哈尔滨
,
120
-
126.
[14]
孟延豪
(
2013
)
基于模糊控制的机器人避障研究
.
中北大学
,
太原
.
OPEN ACCESS
17