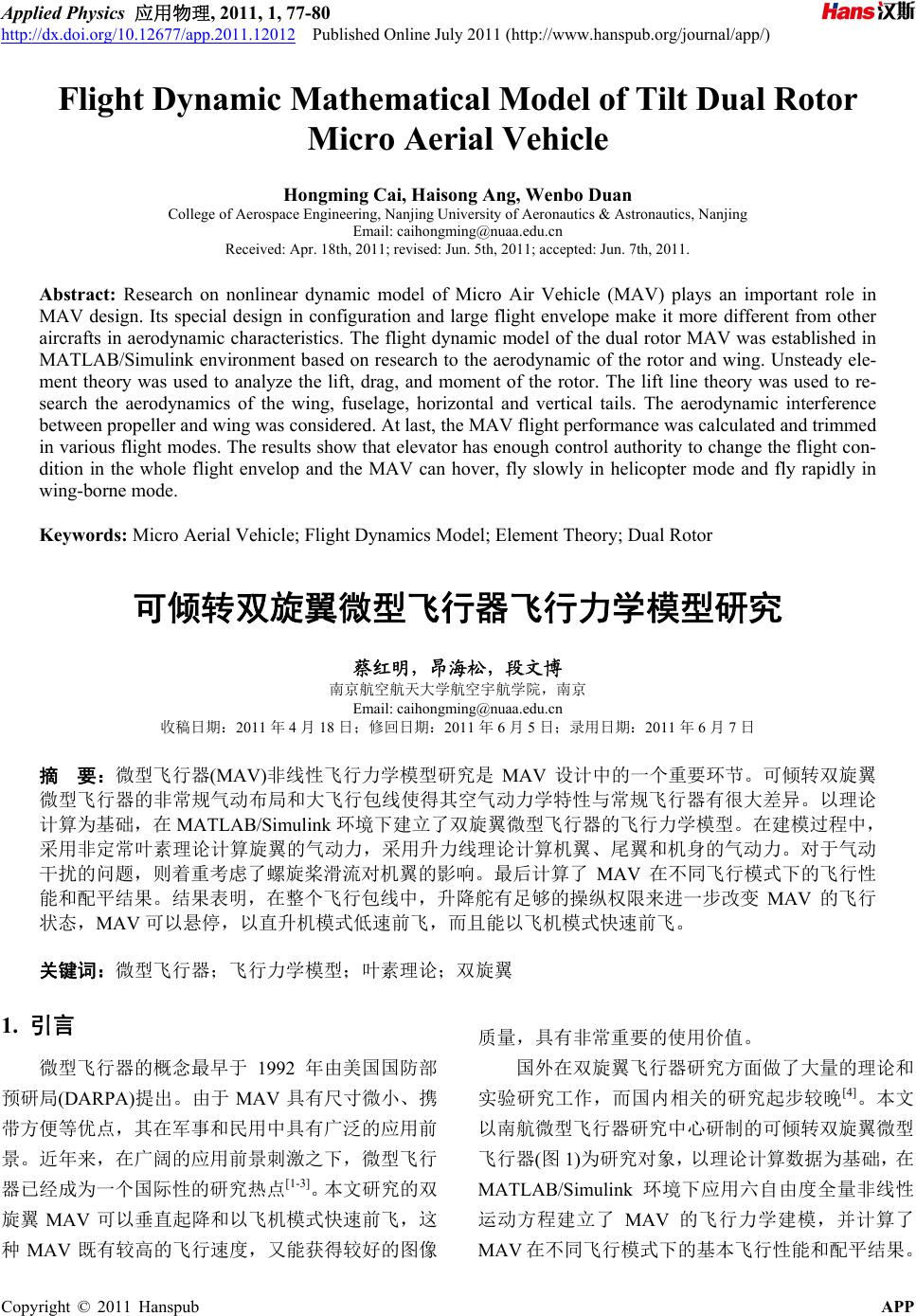
 Applied Physics 应用物理, 2011, 1, 77-80 http://dx.doi.org/10.12677/app.2011.12012 Published Online July 2011 (http://www.hanspub.org/journal/app/) Copyright © 2011 Hanspub APP Flight Dynamic Mathematical Model of Tilt Dual Rotor Micro Aerial Vehicle Hongming Ca i , Hais ong Ang, Wenbo Dua n College of Aerospace Engineering, Nanjing Univ e rsity of Aeronautics & Astronautics, Nanjing Email: caihongming@nuaa.edu. cn Received: Apr. 18th, 2011; revised: Jun. 5th, 20 1 1 ; a c c e p t e d : J u n . 7 t h , 2 0 11. Abstract: Research on nonlinear dynamic model of Micro Air Vehicle (MAV) plays an important role in MAV design. Its special design in configuration and large flight envelope make it more different from other aircrafts in aerodynamic characteristics. The flight dynamic model of the dual rotor MAV was established in MATLAB/Simulink environment based on research to the aerodynamic of the rotor and wing. Unsteady ele- ment theory was used to analyze the lift, drag, and moment of the rotor. The lift line theory was used to re- search the aerodynamics of the wing, fuselage, horizontal and vertical tails. The aerodynamic interference between propeller and wing was considered. At last, the MAV flight performance was calculated and trimmed in various flight modes. The results show that elevato r has enough control authority to change the flight con- dition in the whole flight envelop and the MAV can hover, fly slowly in helicopter mode and fly rapidly in wing-borne mode. Keywords: Micro Aerial Vehicle; Flight Dynamics Model; Element Theory; Dual Rotor 可倾转双旋翼微型飞行器飞行力学模型研究 蔡红明,昂海松,段文博 南京航空航天大学航空宇航学院,南京 Email: caihongming@nuaa.edu. cn 收稿日期:2011 年4月18 日;修回日期:2011 年6月5日;录用日期:2011 年6月7日 摘 要:微型飞行器(MAV)非线性飞行力学模型研究是 MAV 设计中的一个重要环节。可倾转双旋翼 微型飞行器的非常规气动布局和大飞行包线使得其空气动力学特性与常规飞行器有很大差异。以理论 计算为基础,在 MATLAB/Simulink 环境下建立了双旋翼微型飞行器的飞行力学模型。在建模过程中, 采用非定常叶素理论计算旋翼的气动力,采用升力线理论计算机翼、尾翼和机身的气动力。对于气动 干扰的问题,则着重考虑了螺旋桨滑流对机翼的影响。最后计算了 MAV 在不同飞行模式下的飞行性 能和配平结果。结果表明,在整个飞行包线中,升降舵有足够的操纵权限来进一步改变 MAV 的飞行 状态,MAV 可以悬停,以直升机模式低速前飞,而且能以飞机模式快速前飞。 关键词:微型飞行器;飞行力学模型;叶素理论;双旋翼 1. 引言 微型飞行器的概念最早于 1992 年由美国国防部 预研局(DARPA)提出。由于 MAV 具有尺寸微小、携 带方便等优点,其在军事和民用中具有广泛的应用前 景。近年来,在广阔的应用前景刺激之下,微型飞行 器已经成为一个国际性的研究热点[1-3]。本文研究的双 旋翼 MAV 可以垂直起降和以飞机模式快速前飞,这 种MAV 既有较高的飞行速度,又能获得较好的图像 质量,具有非常重要的使用价值。 国外在双旋翼飞行器研究方面做了大量的理论和 实验研究工作,而国内相关的研究起步较晚[4]。本文 以南航微型飞行器研究中心研制的可倾转双旋翼微型 飞行器(图1)为研究对象,以理论计算数据为基础,在 MATLAB/Simulink 环境下应用六自由度全量非线性 运动方程建立了 MAV 的飞行力学建模,并计算了 MAV 在不同飞行模式下的基本飞行性能和配平结果。  蔡红明 等可倾转双旋翼微型飞行器飞行力学模型研究 78 | Figure 1. Dual rotor MAV 图1. 自研的双旋翼微型飞行器 2. 可倾转双旋翼微型飞行器飞行力学建模 2.1. 6自由度运动方程 采用机体坐标系建立 MAV 飞行动力学运动方 程: 2 =sin =coscos =cossin xyz zyx yzx xzy zxy yxz xyyzyzxyzxx xyzxzxxyyzyx yxy yxzxzxxyyzy xyy z VVw VwgFm VVw VwgFm VVw VwgFm wIIIwwIwwM IIIwwIwwM III wIIIwwIwwM IIIw 2 22 y zxyzxxxy xy xxyxyxyxyzz wIwwM III wIIwwIwwMI (1) 式中,力和力矩为旋翼、尾桨、机身和尾翼在机体坐 标系上的合力和合力矩。 MAV 绕质心转动的运动学方程为: tan cossin sin cos 1cos sin cos xyz yz yz www ww ww (2) 式中, 、和 分别为机体的滚转角、俯仰角和偏 航角。 2.2. 旋翼气动力模型 目前研究螺旋桨气动特性的方法主要包括动量理 论、叶素理论、涡流理论和 CFD 等多种方法,本文采 用非定常叶素理论来计算旋翼的气动力。 考虑迎角变化的动态过程,桨叶上翼剖面的倾角 取决与桨距操纵量、桨叶负扭转、挥舞角和弹性扭转 变形。 本文假如压缩性因子 2 1 M 来计入动态效 应和压缩性的影响,又引入Leishman 的半经验模型, 得出翼型的升力、阻力和力矩公式。所以该模型不但 算式简单,且和风洞实验结果符合较好。 最后通过积分就可以得到旋翼的拉力、阻力和俯 仰力矩。 2.3. 机翼气动力模型 浸在螺旋桨滑流中的机翼面积占全部机翼的大部 分,螺旋桨滑流对全机的气动特性有显著的影响;为 了表现螺旋桨滑流的影响,我们采用如下的工程估算 方法[5]。 机翼分为滑流区内和滑流区外,并作如下假设: 只考虑螺旋桨的轴向诱导速度,忽略螺旋桨滑流的扭 转; 为了增加计算精度,引入了修正系数 i K 来修正诱 导速度。 处在螺旋桨滑流中的迎角和侧滑角与滑流区外的 迎角和侧滑角都发生较大变化。采用上述计算方法得 到的力和力矩与实验数据吻合较好[5]。 3. MAV飞行力学模型 本文以图 1双旋翼微型飞行器为研究对象,建立 了MAV 的飞行力学模型,并计算了它的基本飞行性 能和配平曲线。 在商业软件 MATLAB/SIMULINK 环境下建立 MAV 飞行动力学模型如图 2所示。 3.1. 基本飞行性能 1) 悬停时的飞行性能 悬停为 MAV 的重要飞行状态,MAV 悬停时的螺 旋桨转速为 rpm。 4 1.6 10 2) 直升机模式的飞行性能 直升机模式的最小飞行速度为 0,最大飞行速度 为5 m/s。 3) 飞机模式的飞行性能 飞机模式下的最小飞行速度受最小升力限制,算 Copyright © 2011 Hanspub APP 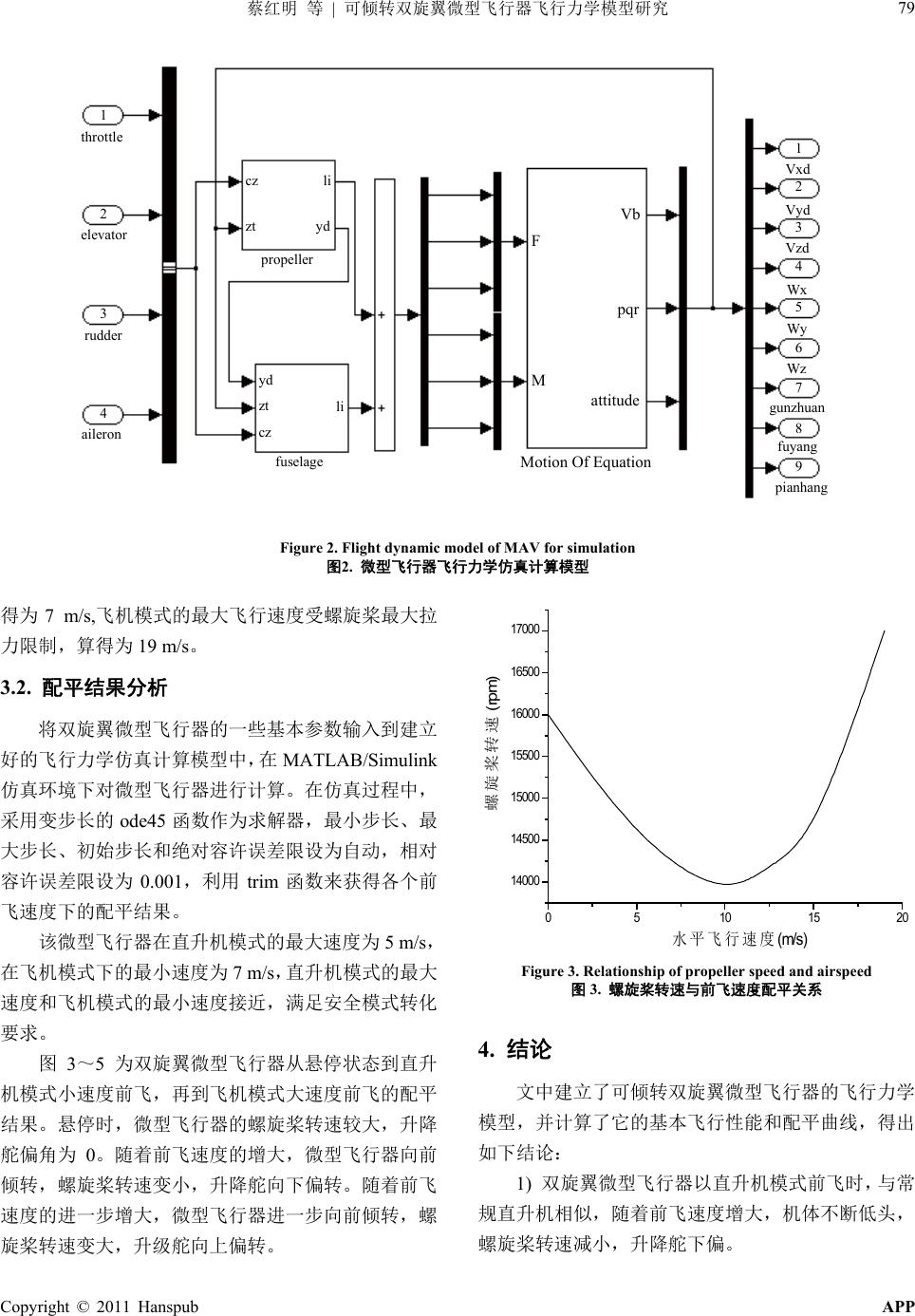 蔡红明 等可倾转双旋翼微型飞行器飞行力学模型研究79 | 1 2 3 4 throttle elevator rudder aileron propeller fuselage cz zt yd zt cz li li yd F M Vb pqr attitude Motion Of Equation 1 2 3 4 5 6 7 8 9 Vxd Vyd Vzd Wx Wy Wz pianhang fuyang gunzhuan Figure 2. Flight dynamic model of MAV for simulation 图2. 微型飞行器飞行力学仿真计算模型 得为 7 m/s,飞机模式的最大飞行速度受螺旋桨最大拉 力限制,算得为 19 m/s。 3.2. 配平结果分析 将双旋翼微型飞行器的一些基本参数输入到建立 好的飞行力学仿真计算模型中,在 MATLAB/Simulink 仿真环境下对微型飞行器进行计算。在仿真过程中, 采用变步长的 ode45 函数作为求解器,最小步长、最 大步长、初始步长和绝对容许误差限设为自动,相对 容许误差限设为 0.001,利用trim 函数来获得各个前 飞速度下的配平结果。 该微型飞行器在直升机模式的最大速度为 5 m/s, 在飞机模式下的最小速度为7 m/s,直升机模式的最大 速度和飞机模式的最小速度接近,满足安全模式转化 要求。 图3~5为双旋翼微型飞行器从悬停状态到直升 机模式小速度前飞,再到飞机模式大速度前飞的配平 结果。悬停时,微型飞行器的螺旋桨转速较大,升降 舵偏角为 0。随着前飞速度的增大,微型飞行器向前 倾转,螺旋桨转速变小,升降舵向下偏转。随着前飞 速度的进一步增大,微型飞行器进一步向前倾转,螺 旋桨转速变大,升级舵向上偏转。 0510 15 20 1400 0 1450 0 1500 0 1550 0 1600 0 1650 0 1700 0 螺旋桨转速 (rpm) 水平飞行速度(m/s) Figure 3. Relationship of propeller speed and airspeed 图3. 螺旋桨转速与前飞速度配平关系 4. 结论 文中建立了可倾转双旋翼微型飞行器的飞行力学 模型,并计算了它的基本飞行性能和配平曲线,得出 如下结论: 1) 双旋翼微型飞行器以直升机模式前飞时,与常 规直升机相似,随着前飞速度增大,机体不断低头, 螺旋桨转速减小,升降舵下偏。 Copyright © 2011 Hanspub APP  蔡红明 等可倾转双旋翼微型飞行器飞行力学模型研究 80 | 0510 15 20 0 20 40 60 80 100 俯仰角 (°) 水平飞行速度(m/s) 05101520 -5 -4 -3 -2 -1 0 Figure 4. Relationship of pitch angle and airsp ee d 图4. 俯仰角与前飞速度配平关系 升降舵偏角 (°) 水平飞行速度 (m/s) Figure 5. Relationship of elevator angle and airspeed 图5. 升降舵偏角与前飞速度配平关系 2) 随着前飞速度的进一步增大,双旋翼微型飞行 器转入飞机模式前飞,螺旋桨转速逐步增大,升降舵 上偏。 3) 直升机模式的最大速度和飞机模式的最小速 度接近,满足安全模式转化要求。 4) 在整个飞行包线中,升降舵有足够的操纵权限 来进一步改变 MAV的飞行状态。 5) MAV可以悬停,以直升机模式低速前飞,而 且能以飞机模式快速前飞。 5. 致谢 感谢邓双厚的帮助。 参考文献 (References) [1] J. Fleming, T. Jones, W. Ng, et al. Improving controls system effectiveness for ducted fan VTOL UAVs operating in cross- winds. San Diego: Proceedings of the 2nd “Unmanned Unlim- ited” System, Technologies, and Operations-Aerospace, 2003: 15-18. [2] M. R. Waszak, J. B. Davidson. Simulation and flight control of an aeroelastic fixed wing micro aerial vehicle. Montreal: AIAA Atmospheric Flight Mechanics Conference, 2001. [3] N. E. Sevant, M. I. G. Bloor, and M. J. Wilson. Aerodynamic design of a flying wing using response surface methodology. Journal of Aircraft, 2002, 37(4): 562-569. [4] 段文博. 可悬停双旋翼微型飞行器设计与制造[D]. 南京航空 航天大学, 2008. [5] 罗东明, 昂海松, 周军等. 螺旋桨式微型飞行器飞行特性分 析[J]. 航空计算技术, 2003, 33(3): 35-38. Copyright © 2011 Hanspub APP |