Electromagnetic Analysis and Applications
Vol.3 No.03(2014), Article
ID:13920,6
pages
DOI:10.12677/EAA.2014.33005
Design for Postpositive Mousing Based on GSM in Long-Distance
Chengdu University of Technology, Chengdu
Email: 1124530597@qq.com, xams.xiang568@qq.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Jul. 15th, 2014; revised: Jul. 22nd, 2014; accepted: Aug. 4th, 2014
ABSTRACT
This design for mousing is made up of power control module, infrared sensor module, signal processing module, distance information transportation based on GSM and device of power grid. The design consists of two sets of conductors, separately linked by fire wire and null line and distributing alternatively. The major innovation is infrared sensor module with Fresnel lens, and that the infrared detecting area should be spread in one direction at least. When the mouse gets into the infrared detecting area, the sensor signal of infrared detecting device is sent to power control module through signal element and then starts the device of power grid to power up to make the mouse be shocked or die. GSM module is adopted to tell that the mouse is caught successfully. This design can be placed in any position that the mouse is always out and there is no need of baits.
Keywords:Infrared Sensor Module, Fresnel Lens, Device of Power Grid, GSM

基于GSM远程后置式捕鼠设计
高 欣,刘香燕
成都理工大学,成都
Email: 1124530597@qq.com, xams.xiang568@qq.com
收稿日期:2014年7月15日;修回日期:2014年7月22日;录用日期:2014年8月4日

摘 要
该捕鼠设计主要由电源控制模块、红外传感器模块、信号处理模块、GSM远程信息传输模块及电网装置组成。其中包括分别与220 V交流电源的火线和零线连接的导电体平行交替的结构,创新之处在于采用带有菲涅耳透镜的热释电红外传感装置以及红外探测区域至少一侧方向外有延伸区域,当老鼠进入红外探测区域,热释电红外传感装置的传感信号经信号单元发送至电源控制单元而启动电网结构加电,以致使老鼠触电后又无法逃离电网而被击晕或击毙。该设计还采用了GSM短信模块,通知捕鼠者已成功捕获消息。该装置可适用于各种有老鼠出没的场所及活动路径上,且无需投放诱饵。
关键词
红外传感器模块,菲涅耳透镜,电网结构,GSM

1. 引言
各类鼠患是人们生活中一直在解决并还会一直延续下去的问题。针对市面上已存在的电子类捕鼠/灭鼠器存在的隐患,该设计更有实用性和可靠性。基于GSM的远程后置式捕鼠设计包括电源控制模块、红外传感器模块、信号处理模块、GSM远程信息传输模块及电网装置。该设计使用简单方便,具有低功耗、高可靠性等优点。
捕鼠器电网装置是强电与老鼠接触的关键部分,由分别与高压导电回路的电源两电极连接的导电体交替间隔排布,高压电流可经老鼠身体形成导电回路从而导致老鼠触电死亡。高压电网平时是不加电的,一方面可节省电能,另一方面是可让老鼠自由进入到电网上。导致电网加电的启动开关是位于电网上方设置的热释电红外传感装置,创新思路在于传感器只能感知电网长度区域约1/3的中间部分的红外发射体,电网两端各1/3的部分的红外发射体不能被传感器感知到。只有当老鼠进入到电网中间区域时,热释电红外传感装置的传感信号感知到老鼠的进入,该感知信号经信号处理模块处理后,送入电源控制单元,用于控制电网结构的加电。此时,老鼠前方和后方1/3的部分都带上高压电,老鼠前进或后退都会被电击。同时电网加电指示灯亮,提醒人电网有电,以防止人员触电。该设计还有另一个创新点是,采用带有菲涅尔镜头的红处传感器,在老鼠运动时才输出感知信号并控制加电,而在老鼠触电不动后则无信号输出,电网不再继续加电。这样的设计不仅节电,而且还可使当有后续老鼠出现时,可让后续老鼠继续进入电网,并在到达电网中部时再次加电,实现连续捕鼠。
2. 系统设计
2.1. 设计思路
基于GSM的远程后置式捕鼠器设计包括电源控制模块、红外传感器模块、信号处理模块、GSM远程信息传输模块及电网装置。其中电网结构就是电击老鼠的场所。热释红外传感装置是该设计的重点,实现了探测、开关控制、电击控制等功能。GSM模块完成通信功能,将捕获老鼠的情况及时发短信到捕鼠者手机上让捕鼠者进行处理。
2.2. 原理阐述
该设计由分别与高压导电回路的电源两电极连接的导电体交替间隔排布并可经老鼠身体形成导电回路且与大地绝缘的电网结构,在电网结构的上方设置有热释电红外传感装置,在热释电红外传感装置探测区域的至少一侧方向的周边外保留有电网结构的延伸扩展部,热释电红外传感装置的传感信号,经其后的信号处理单元送入电源控制单元,用于控制电网结构的加电。当有老鼠进入到该装置电网中部的红外探测区活动时,电网开始加电,使老鼠无法逃脱电网而触电击毙,在无老鼠活动或死老鼠静止在电网上时则不加电,从而节电,并使后续老鼠能继续进入电网区域。
2.2.1. 硬件实现原理
图1是本设计电网装置的一种结构示意图。电网装置由分别与220 V交流导电回路的火线和零线连接的高压导电回路的电源两极连接的导电体构成电网结构5。各导电体平行交替间隔排布并与大地绝缘,各相邻导电体间间距小于鼠体长的一半。在电网结构5的上面通过支架3设置有前带有菲涅耳透镜4的热释电红外传感装置PIR,在热释电红外传感探测区域b的一组相对方向两侧的周边外,分别保留有延伸距离至少等于热释电红外传感装置探测区域b半径长度的电网结构延伸扩展部a,热释电红外传感装置的传感信号,经其后的信号处理单元2送入电源控制单元,通过其中的继电器J控制对电网结构的加电与否。结构如图。
图2是本设计电网装置一种传感信号处理单元的电路结构示意图。带有菲涅耳透镜4的热释电红外

Figure 1. Device of power grid structure
图1. 电网装置结构示意图
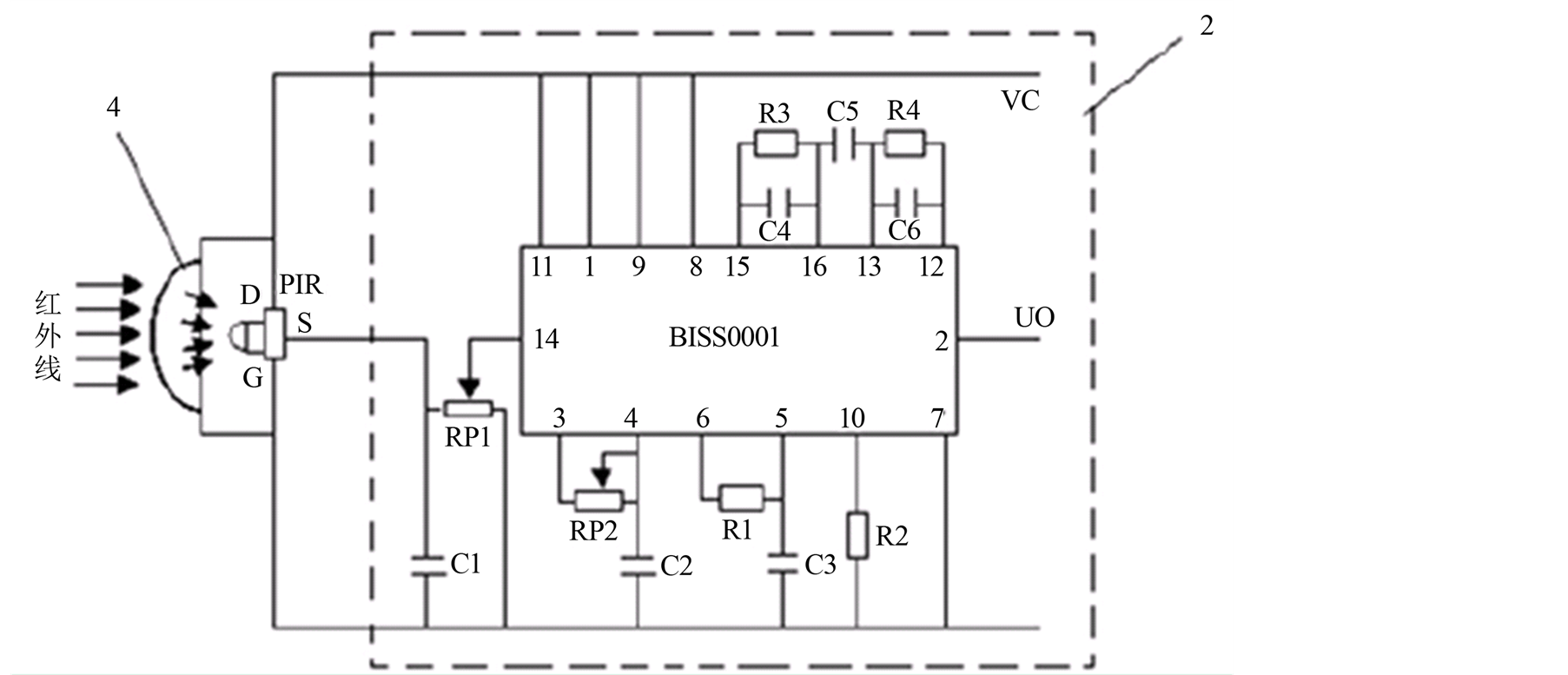
Figure 2. Circuit configuration of sensor signal processing unit
图2. 传感信号处理单元的电路结构示意图
传感装置PIR中的菲涅耳透镜4,位于热释电红外传感装置PIR的正前方中央位置。其输出端S的信号经C1滤波后经过电位器RP1输入到红外传感信号处理器中(图示BISS0001型集成电路)。在改变热释电红外传感装置到电网结构的距离来调整探测范围大小时,可通过调整电位器RP1来调整探测灵敏度;调整电位器RP2则可用于调整输出控制信号的高电平持续时间。由图示集成电路的14脚输入的信号经其第一级运放后从16脚输出,其中的交流信号经电容C5后由13脚送入第二级运放,直流信号则不能通过C5。此后信号再经过其比较判决电路和状态控制器后从2脚向其后的电源控制单元1输出控制信号U0。控制信号U0的高电平持续时间由RP2和C2组成的延迟时间定时器控制,调整RP2可调整2脚输出高电平的时间。R1、C3组成封锁时间定时器,在此时间内,2脚输出的电平不受14脚输入信号控制。R3、C4和R4、C6构成对高频信号有抑制作用的低通滤波器。
热释电红外传感装置PIR前方的菲涅耳透镜4,能将活动老鼠不同部位发出的缓慢变化的红外线切割成断续的红外线,并具有汇聚红外线的功能,使后面的热释电红外传感装置PIR能采集到老鼠身上释放的红外信号,并将红外信号转换成电信号输出。如果老鼠在活动,则输出交流信号,如果老鼠不活动,则输出直流信号。图示如图2[1] 。
图3是本设计电网装置的一种电源控制单元的结构示意图。可与图2所示的传感信号处理单元配合的电源控制单元的结构。由传感信号处理单元输出的控制信号U0经过电阻R5和三极管Q构成的驱动电路,其输出电流控制继电器J工作。当有驱动信号输出时,继电器接点闭合,使电网结构5加电,即可使在电网结构5上活动的老鼠触电后,被电击晕或击毙。限流电阻R6和发光二极管D可用于调试,当电网结构5加电后二极管D亮,从而直观了解电网上是否有电,方便捕鼠器安装与调试。如图3。
图4是GSM实现的硬件基础。GSM集射频电路、基带于一体,向用户提供标准的AT命令,为数据、语音、短信息和传真提供快速、可靠、安全的远距离传输[2] 。图中SIM插卡模块只接受控制模块控制,在接受到控制信号之后,将控制模块传来的信息内容发送给特定手机号码。
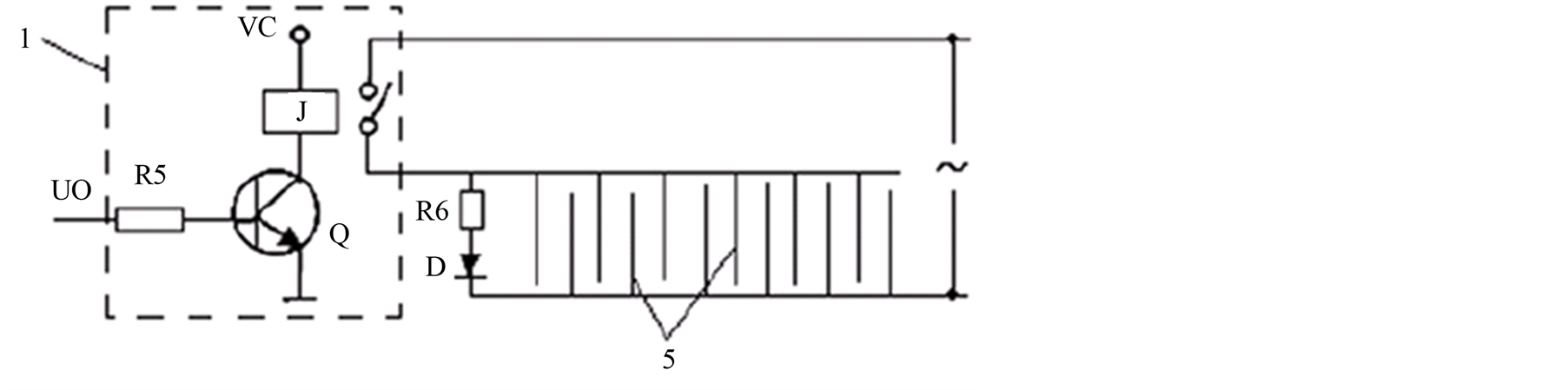
Figure 3. Power control unit structure
图3. 电源控制单元的结构示意图

Figure 4. GSM’s hardware basis
图4. GSM实现的硬件基础
2.2.2. 软件实现原理
1) 触发信号的产生
在前面的装置中已经提到,热释电红外传感装置将信号采集并输出直流信号和交流信号,软件实现就将直流信号和交流信号变成二进制的0和1,只要检测到0到1的变化即触发开关控制加电装置开始加电。当检测到持续一段时间的1到0变化,就停止加电。这样就实现了红外信号产生触发信号控制加电装置。
2) GSM短信模块的应用
为了方便捕鼠者及时处理被电的老鼠,可以利用GSM模块实现通信功能。系统软件涉及到单片机与GSM模块之间的串行通信、单片机控制模块中主机和从机中SPI模式通信、单片机对GPS信息解码、对GSM-AT指令的编码等。
主程序功能是系统开机后对GSM模块初始化并发送到手机。程序流程图如图5。
子程序完成设置系统串口波特率、启动串口、初始化数据存储单元任务,实现控制模块以及GSM模块的初始化工作。
串口设置:
①工作方式
GSM通信模块的数据接口配置为8位数据位、1位停止位,因此设置单片机的串口工作方式为异步通信模式。
②波特率设定
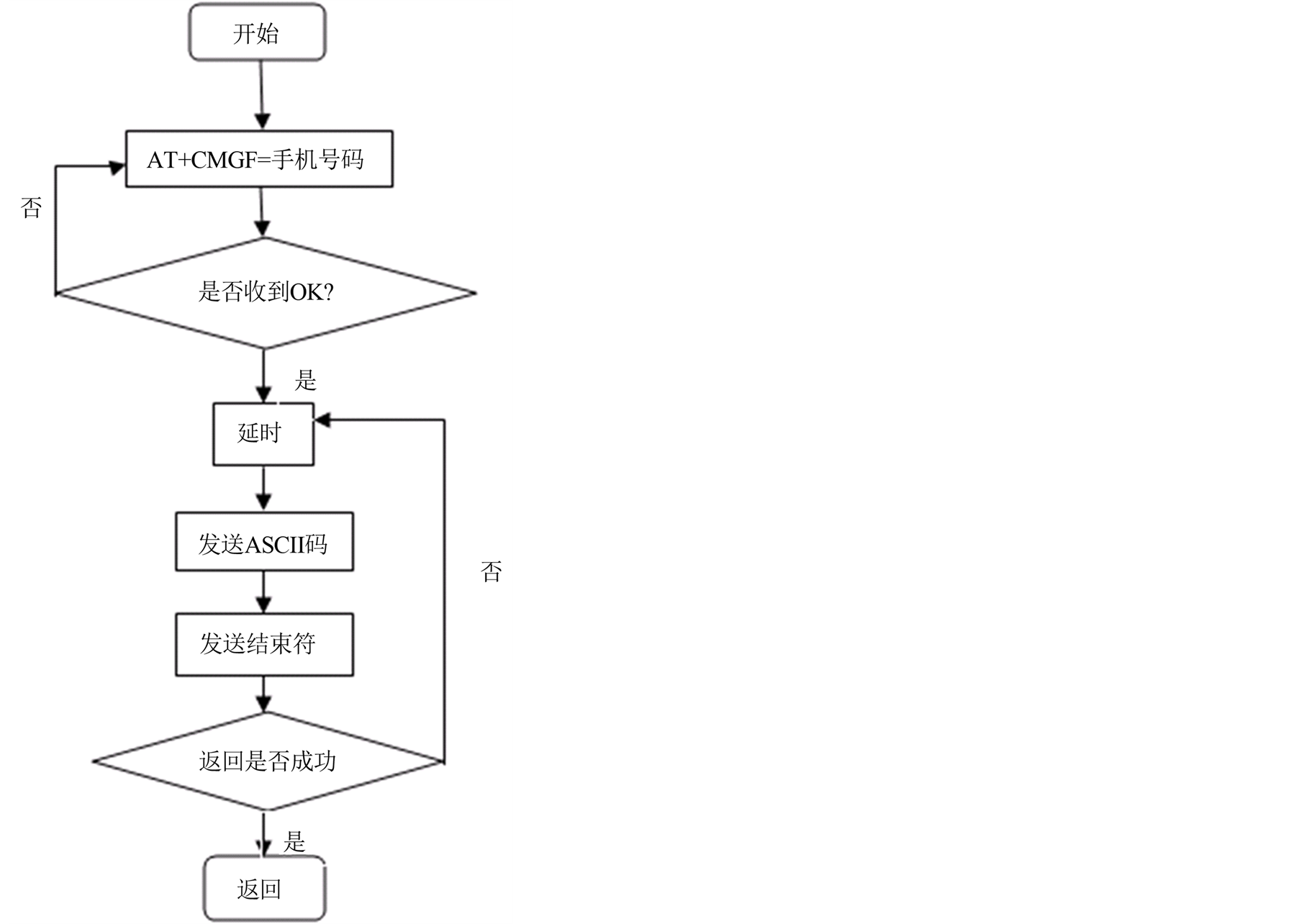
Figure 5. The flow diagram of AT instructions
图5. AT指令流程图
STC89C52单片机控制系统晶振是11.0592 M,波特率需为9600 b/s。根据公式X = 2^n − (12*2^SMOD)/(波特率*32*fosc)可以计算初值[3] 。
③AT指令
AT指令的指令符号、数据、PDU数据包等都是以ASCII编码形式传送,因此需要将手机短信工作模式设置为PDU格式,通过指令AT + CMGF = 0完成,而且单片机向手机发送指令需以回车符结束。如“AT + CMGF = 0”指令序列为“41 H,54 H,2 BH,42 H,4 DH,47 H,46 H,3 DH,30 H,30 H,0 DH”,最后一个字节0 DH(回车符)表示该指令结束[2] 。AT指令流程图如图5。
3) 创新之处
将捕鼠器、GSM模块融合到一起,通过单片机从中连接控制,实现了远程控制,同时增加了人机交互性,采用独特的后置式设计,即只有当老鼠通过电网,电网才带电。没有老鼠通过时,电网处于休眠状态,耗电量很低并带有创新性。
创新性可归结如下:
①后置式:采用带有菲涅尔镜头的红处传感器,在老鼠运动时才输出感知信号并控制加电,使老鼠进入装置后进退两难,因此工作可靠。彻底解决了目前电子捕鼠器始终给电网加电所导致的长期耗电、且一当老鼠触电后倒下而脱离电网,最终逃脱的缺点。
②远程报警:捕到老鼠后,立即由GSM模块通过手机通报捕鼠人员,使捕鼠人员可同时管理多个捕鼠器,并可休息或作其他工作,减轻劳动强度。
③成本低:由于老鼠触电后无法逃脱,电网持续给老鼠通电,因些电高电网的电压只需110或220 V市电即可。而现有的捕鼠器由于考虑老鼠触电后倒下会脱离电网,必需在老鼠触电的瞬间将老鼠电死,因此所加电压一般在2000 V以上,导致设备成本升高。
④安全性好:由于只有电网长度区域约1/3的中间部分能被红外传感器感知并加加压,只要人不进入该区域电网是不加电的,且电网比现有的电子捕鼠器电网小得多,因此本系统具有很高的安全性。
3. 实用性测试
3.1. 测试结果
该设计被完成之后,投入到经常有老鼠出没实验室进行了为期一周的测试,根据老鼠经常出没的痕迹,将该设计连接好并确保安全放置,并安装摄像头以便观察,以下是测试结果:
1) 周一的晚上成功捕获一直老鼠,由于装置采用带有菲涅尔镜头的红处传感器,检测到老鼠到来后成功加电并使老鼠不能逃跑,之后大概50秒内会收到短信通知。
2) 为了测试该设计的连续捕鼠,并未处理被捕获的第一只老鼠,在周五晚上以同样的方法捕获第二只老鼠,同样收到短信通知。
3.2. 测试总结
1) 通过上述测试结果可知该设计可靠性良好。
2) 将该设计的体积和导体间距离改变也可以用来捕获蟑螂等其它有害动物。
3) 该设计实现了低功耗、高可靠性,操作简单,实现电能节省。
4) 非人控制开关并且及时做到物与人通信,更加实用以及安全。
5) 老鼠一旦进入该装置,就不能离开,也可以做到连续捕鼠。
6) 为了效果更红地捕鼠,可以放置诱饵。
参考文献 (References)
- 刘永胜 (2006) 物理学. 天津大学出版社, 天津.
- 汉泽西, 吕飞 (2005) GSM网络AT指令仿真系统的研究与开发. 现代电子技术, 17, 9-11.
- 刘秀峰, 游雨云 (2011) 单片机原理与应用. 北京理工大学, 北京.