Open Journal of Transportation Technologies
Vol.06 No.03(2017), Article ID:20568,8
pages
10.12677/OJTT.2017.63011
The Optimization for Traffic Management of Crossroad
Tianxiong Chen, Bin Chen, Zheng Zhang*
Institute of Solid Mechanics, School of Aeronautic Science and Engineering, Beihang University, Beijing
*通讯作者。

Received: Apr. 27th, 2017; accepted: May 11th, 2017; published: May 19th, 2017

ABSTRACT
Traffic management is not only the bottleneck of urban transportation, but also a significant subject of development of the economy and society. A lot of researches focus on this subject at home and abroad, however, most of which are mainly based on the empirical formula. A universal method is required to accurately assess the optimization of traffic flow at the intersection. This work presented the vehicle traffic (pass the crossroad) model constructed by theoretical mechanics method, through field investigation. Discussions were conducted on the relationship among the duration of traffic signal conversion, the traffic flow (the distance between vehicles and the starting style), the security distance between vehicles, the relationship of Car-following, and so on. Consequently, the optimization choice of Car-following was obtained, which provides a better theoretical method for the traffic management of crossroad.
Keywords:Safety Distances, Car-Following Theory, Maximum Traffic Flow, Optimization of Traffic Lights, Line Distance
十字路口的交通流优化
陈天雄,陈斌,张铮*
北京航空航天大学,航空科学与工程学院,固体力学研究所,北京

收稿日期:2017年4月27日;录用日期:2017年5月11日;发布日期:2017年5月19日

摘 要
十字路口交通管理不仅是城市交通的瓶颈,更成为一个对经济、社会有重大影响的课题。国内外已经有很多相关的研究,但大多以经验公式为基础,并没有形成普适的理论方法,难以准确的对十字路口的交通流量进行优化。在前人研究基础上,本文根据实地调查,用理论力学方法建立了十字路口车辆通行模型,讨论了红绿灯时间长度与车流量之间的相互关系,分析了影响车流量的各个因素,如车辆之间的安全跟驰距离,前车和后车的跟驰关系,车间距及启动方式等,最终通过计算分析得到了车流通过量优化方案,为十字路口交通管理提供了理论借鉴。
关键词 :安全跟驰距离,跟驰理论,最大车流量,红绿灯时长优化,车间距

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
现代社会人口持续膨胀,私家车保有量持续上升,而城市交通基础设施却并没有跟上社会发展的脚步,使得城市交通拥堵问题十分严重。拥挤的道路不仅造成人们上下班时间的增加以及出行的困难,同时还会产生巨大的社会成本。不仅如此,汽车在道路上耗费的时间越久,低速运行的汽车由于汽油燃烧不充分,导致更多的污染物排放到空气当中。这也是雾霾天气的主要原因之一。另一方面,由于城市早期规划不合理,导致现在很难再通过扩建道路的方式来扩大通行能力,所以较经济可行的方式是通过优化交通流来增大城市的道路承载能力,而城市交通与高速公路的一个最明显的区别在于城市道路拥有大量的十字路口。十字路口是城市交通正常运转的必要保证,但同时也导致城市道路的通行能力远低于高速公路,尤其当十字路口的交通流规划不合理时,会进一步损害城市道路的通行能力。
2. 经典交通流理论与模型简介
在早期交通流的研究中,主要提出了以下几个模型 [1] 。
格林伯(Greenberg)模型:
 (1)
(1)
其中 为流量最大时的速度,即最佳车速。
为流量最大时的速度,即最佳车速。 为该时刻的车流量密度,
为该时刻的车流量密度, 为阻塞密度,
为阻塞密度, 为此时的速度。
为此时的速度。
格林希尔治(Greenshields)模型:
 (2)
(2)
其中 为自由流车速,
为自由流车速, 为阻塞密度。格林伯(Greenberg)模型是从实际数据出发进行归纳拟合得到的,对于小流量的模型并不适用。
为阻塞密度。格林伯(Greenberg)模型是从实际数据出发进行归纳拟合得到的,对于小流量的模型并不适用。
跟驰模型是交通流分析中经常使用的另一种模型,GM (Genera Motor)跟驰模型在车辆跟驰模型中属于刺激-反应类的一种,也是比较经典的跟驰模型。结合驾驶动力学中的反应概念,通过跟驰车辆的加速度表示,给定公式:

其中:刺激采用跟驰车与被跟驰车的相对速度表示;而灵敏度则视模型的具体应用情况而有所差异。GM模型能够较完整的体现车辆跟驰行驶过程中的制约性、延迟性及传递性。
根据线性跟驰理论,假设道路交通流密度很大时,车队中任一辆车都受前车制约,驾驶员根据前车的状态调整自己的速度,同时认为车辆行驶是一个变加速的过程。根据线性跟驰理论,对于非匀加速运动,车辆速度可按下列公式 [1] 计算:
 (3)
(3)
其中xn(t)为第n辆车在t时刻行驶的距离,当Δt足够小的时候,可以近似的用  来代替
来代替 的值,车辆行驶距离的计算公式为:
的值,车辆行驶距离的计算公式为:
 (4)
(4)
交通波理论则是一种将车流看作连续流体的理论,运用流体力学的理论,将车流量的疏密变化近似成一种水波,通过分析车流波的传动速度,来描述车流拥堵的消散过程,该理论在分析方法上能够使得问题变得更加简单,从总体上较好地描述了车流的消散与堆积过程。元胞自动机是现在比较热门的研究模型,在该模型中,将每一辆汽车看做是一个动态的相互独立的元胞,每个元胞的状态都由附近的元胞决定,通过模拟能得到车流量变化的过程,能够较好的适应多种不同的情况,尤其当使用计算机模拟时,有着不可替代的优势。
工程中比较常见的方法是用经验公式求解,《美国通行能力手册》 [2] 给出的方法如下:当绿灯开启时,驾驶员做出反应和车辆启动都需要一个时间延迟,这个过程会影响到后几辆车(一般估计为五辆),而后面的车流符合饱和流的要求。这样就能够求出在红绿灯时间给定的情况下通过的车流量。
本文利用理论力学方法,通过严谨的推导来分析十字路口交通流量,同时考虑多个变化参量,建立一套比较符合实际的分析模型,并与已有的研究成果进行对比,进而得出十字路口交通流规划的优选方案。
3. 理论力学建模
十字路口是城市交通的瓶颈,城市交通堵塞往往源自十字路口。如何保持十字路口最大的车流通过量是交通管理的关键。
一般而言,在十字路口,等候绿灯的车辆间距越小,车辆通过路口需要行驶的距离也就越短,也就是说,更多的车辆可以经过更短的距离通过路口。但是,由于车距小,绿灯亮后车辆无法高速启动,严重制约了车辆通过速度,从而无法达到最大的车流通过量。如果车距较大,等候车辆可以较大的加速度启动,甚至可以同时启动,以较快的车速通过路口,将大大缩短单车通过路口的时间,从而使得车流量大大增大。当然,如果车距过大,导致车辆到路口的距离过长,而绿灯时间有限,车流通过量反而会减少。还应该注意到,绿灯时间不可能也不应该过长。绿灯时间过长一方面导致通行车辆密度大大降低,直接影响车辆通行效率,另一方面将严重阻滞另一方向的车辆流。
3.1. 安全跟驰距离
所谓“安全跟驰距离”,是汽车行驶时,能够保证在出现意外紧急刹车时,前后辆车恰恰不发生追尾事故的前后车间距。为了保证在前车紧急刹车的突发情况下,前后车不会发生相撞,当前车启动时,后车驾驶员经过一定的迟滞时间后开始加速,认为此时后车的加速度使得后车能够以最大的加速度进行加速却不会发生相撞。
某时刻前车突然以加速度 刹车,后车在经过一定的迟滞时间Ts后以最大加速度a0急刹车。此时,前车的速度为vi,后车的速度为vi+1,则从前车紧急刹车到两车都停车,前车行驶的距离为:
刹车,后车在经过一定的迟滞时间Ts后以最大加速度a0急刹车。此时,前车的速度为vi,后车的速度为vi+1,则从前车紧急刹车到两车都停车,前车行驶的距离为:
 (5)
(5)
后车行驶的距离可以分为两部分,当前车开始刹车时,后车需要一定的迟滞时间 才能做出反应,在这段时间内,后车依然按照前面的加速度进行匀加速行驶,这段时间内行驶的距离为
才能做出反应,在这段时间内,后车依然按照前面的加速度进行匀加速行驶,这段时间内行驶的距离为 。经过迟滞时间后,后车迅速以最大的加速度进行减速,这段时间内行驶的距离为
。经过迟滞时间后,后车迅速以最大的加速度进行减速,这段时间内行驶的距离为 ,这里设加速与减速时的加速度数值相同。
,这里设加速与减速时的加速度数值相同。
 ,
, (6)
(6)
则从前车紧急刹车到两车都停车,后车行驶的距离一共为:
 (7)
(7)
为了保证两车不发生碰撞,两车的安全跟驰距离Ls为:(显然,Ls ³ 0)
 (8)
(8)
这是一般情况下,前后两车间安全跟驰距离的理论力学计算公式。
设车流匀速运动时的速度为v0,此速度亦即城市道路最大限速,设某时刻前后两车均以此速度匀速行驶,前车突然以加速度  进行减速刹车,后车经过迟滞时间后以最大减速度
进行减速刹车,后车经过迟滞时间后以最大减速度 进行急刹车(注:
进行急刹车(注:  小于
小于 ),此时前后车的安全间距为:
),此时前后车的安全间距为:
 (9)
(9)
这是车流按最大限速匀速行驶时,安全跟驰距离的理论力学计算公式。
3.2. 最大车间距
当车间距达到最大值 时,前车不动,后车即进行加速;急刹车时,经过迟滞时间后再以最大加速度进行减速,而前后车不致发生碰撞,即:
时,前车不动,后车即进行加速;急刹车时,经过迟滞时间后再以最大加速度进行减速,而前后车不致发生碰撞,即:
 (10)
(10)
等候绿灯车时车辆排队的间距为最大车间距,此时,当绿灯亮后前后车可同时启动而紧急刹车时不致发生碰撞。按这一前提,上式为安全跟驰距离的理论力学计算公式。
3.3. 启动时的迟滞时间和车间距的关系
对于排队通过道路交叉口的车队,启动时间间隔随两车间距增大而减小。这里,定义车间距为前车车尾到后车车头的距离。当红灯变为绿灯时,认为第一辆车的迟滞时间为零。设当两车的间距为  时,后车迟滞时间为
时,后车迟滞时间为  ;当两车间距增大到
;当两车间距增大到  时后车迟滞时间为
时后车迟滞时间为  。此时,车间距进一步增大将减少通过的车流量。假设启动迟滞时间与车间距成反比,可以得到后车的迟滞时间随着车间距
。此时,车间距进一步增大将减少通过的车流量。假设启动迟滞时间与车间距成反比,可以得到后车的迟滞时间随着车间距 变化的关系式:
变化的关系式:
 (11)
(11)
3.4. 一般情况下的后车启动模式
排队通过十字道路交叉口的车辆,前后两车的相对速度和距离随时会发生变化,为保持前后两车间的安全跟驰距离,后车须主动调整车速。设某时刻前后两车的车速分别为 和
和 ,在某个很短的时间间隔
,在某个很短的时间间隔  内,前车车速变化为
内,前车车速变化为 ,经过
,经过 的迟滞时间后,后车
的迟滞时间后,后车 内车速变化为
内车速变化为 。在这一变化过程中,两车由于速度变化行驶的距离分别为:
。在这一变化过程中,两车由于速度变化行驶的距离分别为:
 ,
, (12)
(12)
由于 很小,这里假设两车在该时间段内均以前一时刻的速度行驶。变速过程后,两车间的安全跟驰距离为:参看式(8)
很小,这里假设两车在该时间段内均以前一时刻的速度行驶。变速过程后,两车间的安全跟驰距离为:参看式(8)
 (13)
(13)
其中 ,
, 分别为后车与前车行驶的距离。为保持前后两车的安全跟驰距离,两车间距变化为:
分别为后车与前车行驶的距离。为保持前后两车的安全跟驰距离,两车间距变化为:
 (14)
(14)
从而可以得到:
 (15)
(15)
 是一个小量,所以在这段时间内速度的变化量
是一个小量,所以在这段时间内速度的变化量  也为一个小量,忽略二次小项并由
也为一个小量,忽略二次小项并由  可得
可得
 (16)
(16)
可以据此求出后车的加速度 随前车加速度
随前车加速度 以及前后两车速度的变化规律。减速时加速度取负值,加速时取正值,进而根据此公式可以得到整个车队的车辆之间相互影响的关系(注:
以及前后两车速度的变化规律。减速时加速度取负值,加速时取正值,进而根据此公式可以得到整个车队的车辆之间相互影响的关系(注:  )。加速减速过程均遵循上述规律,从而使前后相邻的两车保持安全跟驰距离,两车达到最大速度后保持安全跟驰距离行驶。
)。加速减速过程均遵循上述规律,从而使前后相邻的两车保持安全跟驰距离,两车达到最大速度后保持安全跟驰距离行驶。
3.5. 一次绿灯时长内通过的车流量计算流程
设绿灯亮时,第一辆车立即启动。经过一定的迟滞时间,第二辆车按照前面讨论的模型立即启动。以此类推,后面每一辆车都在前车启动后,经过一定的迟滞时间后启动。并按照安全跟驰距离行驶。假设在等候车队启动过程中没有意外刹车和减速。
假设在一个绿灯时长 内,经过
内,经过 时间后,第i辆车开始启动,可以求出其在启动后
时间后,第i辆车开始启动,可以求出其在启动后 内行驶的距离
内行驶的距离 。设车辆长度为,如果
。设车辆长度为,如果  ,其中
,其中 为排队等候时前后车的距离,则第i辆车在绿灯结束时能够顺利的通过道路交叉口。继续考察第i+1辆车,……,直到第n辆车,使得
为排队等候时前后车的距离,则第i辆车在绿灯结束时能够顺利的通过道路交叉口。继续考察第i+1辆车,……,直到第n辆车,使得  ,则在
,则在  时长的绿灯期间,通过十字道路交叉口的车辆数为n,则通过十字道路交叉口的车流量为
时长的绿灯期间,通过十字道路交叉口的车辆数为n,则通过十字道路交叉口的车流量为  ,其中,
,其中, 、
、  和
和 分别为绿灯、红灯和黄灯时长。计算流程如图1所示,取车辆长度
分别为绿灯、红灯和黄灯时长。计算流程如图1所示,取车辆长度 。取
。取 ,
, ,最大车速为
,最大车速为 ,黄灯时间恒为
,黄灯时间恒为 。
。
3.6. 大流量情况的数值分析与模拟
若车流量较大,下游不能疏通所有车辆,即直到绿灯结束时,仍有车辆在排队。在这种大流量的情况下,根据本文模型用MATLAB模拟可得车间距变化时的车流量变化如图2。
从上图得车间距为4.4 m时的车流量要大于车间距为1.6 m与车间距为1 m的情况,同时还大于车间距为6 m的情况,这说明随着车间距的增大,车流量会先增大后减小。同时从上图还可以得到,随着红灯时间延长,车流量增长速度逐渐放缓,最终趋近于一个稳定值。当红灯时间大于55 s后,车流量增长幅度很小,红灯时间继续延长会使得另一个方向上车队等待时间过长。故当交通流量较大时,可将红灯时间长度设置为55秒左右,这样既能获得一个较优的车流量值,又不会使得排队等待时间过长,避免造成另一个方向的堵塞。这个红灯时间也比较符合实际情况下的红灯时间的设置情况,所以这也说明现实中红灯时间长度较为合理。

Figure 1. Flow chart
图1. 流程图
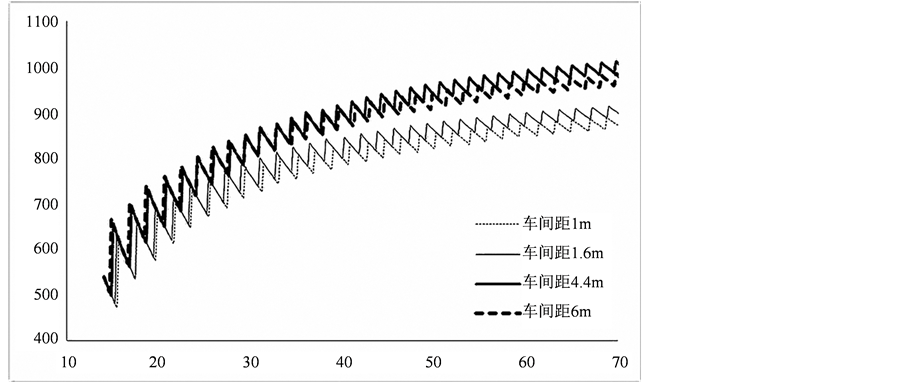
Figure 2. The relationship between vehicle flow and time of red light at different car distance
图2. 车间距变化时车流量–红灯时长图
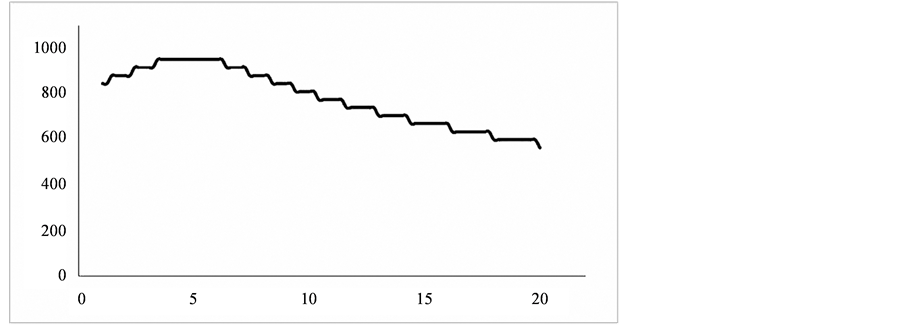
Figure 3. The relationship between vehicle flow and car distance
图3. 车流量–车间距曲线图
若红灯时间均为55秒,改变车间距,本文模型模拟的结果如上图3,可以看出,随着车间距的增大车流量递增,且存在最大值,车间距取4~6米时车流量最大。且最大值比实际观察中车间距为1.6 m时车流量要大8%。当十字道路交叉口十分拥挤时,由于车间距过小,使得车辆无法同时高速启动,造成车流量较小。所以驾驶员应当在等待红灯时适当的调整自己与前车间距,直到一个合适的距离,使得车流量最大。不过随着车间距的增大,会有后车插入间隙中,使得原有车间距减小,车流量反而显著的减小,是不恰当的驾驶行为。
3.7. 模型对比分析
车辆拥堵时,通常车间距较小,假设为1.6 m,下图4给出了作者实地观测结果、经验公式 [2] 评估结果和本文模型优化结果,其中,观测结果为作者在北京市海淀区学院桥道路交叉口观测所得。
对比经验模型和本文模型可以看出,当车间距相同时,本文对车流量的模拟比经验模型更贴近实际,同时本文结果来自于理论模型的理想启动状况(无刹车减速等意外情况),所以得到的车流量也比实际的车流量略大,这也证明了本模型的有效性。
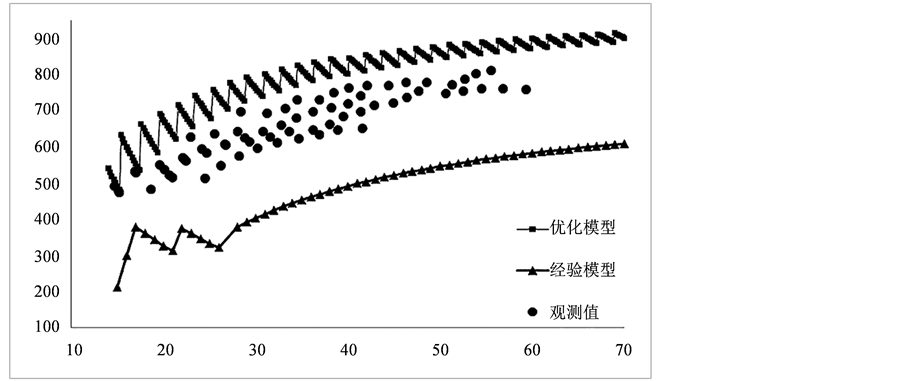
Figure 4. The relationship between vehicle flow and time of red light when the car distance is 1.6 m
图4. 车间距为1.6 m时车流量–红灯时间对比图
4. 结论
本文模型根据理论力学方法,参考车辆跟驰模型,通过前后车的“安全跟驰距离”概念,考虑了前车加速度对后车加速度的影响,建立了严谨的前后车跟驰关系,在单车的微观角度上揭示了十字道路交叉口车流量随着各个相关影响因素变化的原因和规律。本文模型估测的车流量与作者实际观测的结果较为一致,相较工程评估方法更为可靠。
作者重点讨论了红灯时长和车间距对通过车流量的影响,发现现用红灯时长比较合理,根据具体情况不同,可根据本文模型合理优化红灯时长;车间距是影响车流通过量的另一个重要因素,由于种种客观原因,现实中车间距往往过小,严重的阻滞了车流量,具有较大的改善空间。
综上所述,本文模型是一种兼具理论严谨性和工程适用性的十字道路交叉口交通流量评估方法,为提高十字道路交叉口交通流量提供了理论分析和优化建议,具有一定社会价值。
文章引用
陈天雄,陈 斌,张 铮. 十字路口的交通流优化
The Optimization for Traffic Management of Crossroad[J]. 交通技术, 2017, 06(03): 86-93. http://dx.doi.org/10.12677/OJTT.2017.63011
参考文献 (References)
- 1. 张生瑞. 交通流理论与方法[M]. 北京: 中国铁道出版社, 2010.
- 2. 美国交通研究委员会TRB. 道路通行能力手册(精)[M]. 北京: 人民交通出版社, 2007.