设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Operations Research and Fuzziology
运筹与模糊学
, 2011, 1, 1-5
http://dx.doi.org/10.12677/orf.2011.11001 Published Online August 2011 (http://www.hanspub.org/journal/orf/)
Copyright © 2011 Hanspub
ORF
Attribute Reductions in Intuitionistic Fuzzy Information
Systems Based on Dominance Relations
#
Wensheng Du
1
, Baoqing Hu
1*
, Ya n Zhao
2
1
School of Mathematics and Statistics, Wuhan University, Wuhan
2
Department of Mathematics, College of Information Science and Technology, Jinan University, Guangzhou
Email: wsdu@whu.edu.cn; bqhu@whu.edu.cn
Received: Jun. 21s
t, 2011; revised: Jul. 20th, 2011; accepted: Jul. 21st, 2011.
Abstract:
Many methods based on the rough set theory to deal with information systems have been proposed
in recent years. However, intuitionistic fuzzy information systems have not been investigated yet. In this pa-
per, dominance relations are firstly defined in intuiti
onistic fuzzy information systems and decision tables,
and then the concepts of attribute reductions and relative reductions are proposed. Practical approaches to
compute all reductions and relative reductions are presented by introducing of discernibility matrix and dis-
cernibility function.
Keywords:
Dominance Relations; Attribu te Redu ctions; Intuitionistic Fuzzy Sets; Fuzzy Information
Systems
基于优势关系的直觉模糊信息系统的属性约简
#
杜文胜
1
,胡宝清
1*
,赵
彦
2
1
武汉大学数学与统计学院,武汉
2
暨南大学信息科学技术学院数学系,广州
Email: wsdu@whu.edu.cn; bqhu@whu.edu.cn
收稿日期
:
2011
年
6
月
21
日;修回日期:
2011
年
7
月
20
日;录用日期:
2011
年
7
月
21
日
摘 要:
近几年来出现了许多用粗糙集理论处理信息系统的方法,但是对直觉模糊信息系统还没有做
出相关的讨论。本文首先在直觉模糊信息系统与决策信息表中定义了优势关系,然后引入了基于此
优势关系的约简与相对约简的概念,并通过辨识矩阵及辨识函数得到求解约简与相对约简的具体方
法。
关键词:
优势关系;属性约简;直觉模糊集;模糊信息系统
1.
引言
从
Zadeh
通过元素的隶属度引入模糊集
[1]
的概念
以后,出现了许多处理不确定和不精确问题的理论和
方法。作为模糊集的拓展,
Atanassov
提出了直觉模糊
集
[2]
,由于它同时考虑了隶属度、非隶属度和犹豫度
这三个方面的信息,因而比
Zadeh
型模糊集在处理模
糊性和不确定性等方面更具灵活性和实用性,并且被
广泛应用于实际问题,如于决策、医疗诊断、逻辑规
划、近似推理、模式识别等领域
[3]
。
1982
年,
Pawlak
教授提出了粗糙集
[4]
的概念,成
为了一个新的处理模糊和不确定知识的数学工具。近年
来,粗糙集理论已被成功应用于机器学习、数据挖掘、
模式识别等领域。
属性约简是粗糙集理论的核心问题之
一,其主要思想在于保持分类能力不变的前提下,通过
属性约简,去掉不必要的属性,使知识表示简化,但又
不丢失基本信息,导出问题的分类或决策规则。
经典粗糙集理论以完备信息系统为研究对象,以
等价关系
(
不可区分关系
)
为基础。然而,在实际问题
*
:通讯作者。
#
基金项目:国家自然科学基金资助项目
(61179038
,
70771081)
。
杜文胜 等基于优势关系的直觉模糊集信息系统上的属性约简
2
|
中,许多信息系统是基于优势关系的
(
如产品质量、市
场份额、负债比率等
)
,这是传统的粗糙集理论不能解
决的。因此
Greco
等提出了基于优势关系的粗糙集理
论
(Dominance-based Rough Set Approach
,
DRSA)
[5]
,
该理论主要是将条件属性集及决策属性集上的等价关
系替换为优势关系,但仍保持经典粗糙集的基本性质。
张文修等提出了协调集
[6-9]
的概念,并通过协调集建立
了辨识矩阵,进而引入了判定定理,简化了求解约简
的说理过程。
本文将直觉模糊集理论与基于优势关系的粗糙集
理论相结合,得到了基于优势关系的直觉模糊信息系
统的属性约简,进一步丰富了粗糙集理论。
2.
直觉模糊集的基本概念
传统的模糊集给出了论域中元素的隶属度,而直
觉模糊集不仅给出了论域中元素的隶属度,而且还给
出了非隶属度。
定义
2.1
论域
U
上一个直觉模糊集是下列形式的
一个对象
,,
AA
A
xx xxU
,
其中
A
x
称为
x
属于
A
的隶属度,
A
x
称为
x
不属于
A
的隶属度,并且满足关系式
AA
01, x
x
xU
。称
1
AA
x
x
为
x
属于
A
的犹豫度或不确定度。
直觉模糊集的序关系
[10]
定义如下:
定义
2.2
(
格
)
为方便说
明,记
*
*
,
L
L
*
121 2
,0,10,10
Lxxxx
1
,我 们 记
上的关系
*
L
*
L
如下:
*
121211 22
,,,
L
x
xyyxyx
y
。
由上定义可知,序关系
*
L
是
上的一个偏序关
系,且
是一个完备格,最大元与最小元分别
为 ,。
*
L
*
*
,
L
L
1,0
*
1
L
*
00,1
L
3.
基于优势关系的直觉模糊信息系统的
属性约简
定义
3.1
称一个四元组
,,,
I
UATVf
为一个
直觉模糊信息系统
(Intuitionistic fuzzy information sys-
tems
,
IFIS)
,其中
U
为有限非空对象集;
AT
为有限
非空属性集;
V
为属性值值域;
f
为对象属性值映射。
即: ,
12
,,,
n
Uxx x
12
,, ,
p
A
aa a
a
,
,为属性 的值域,其中每个元素均为
直觉模糊集。
aAT a
VV
a
V
:
f
UAT V
,且
,
a
f
xa V
,即
,,
aa
f
xa
x x
。
若
1
aa
x
x
,则该信息系统退化为一般的
信息系统,这种系统已经在文献
[11,12]
中得到了讨论。
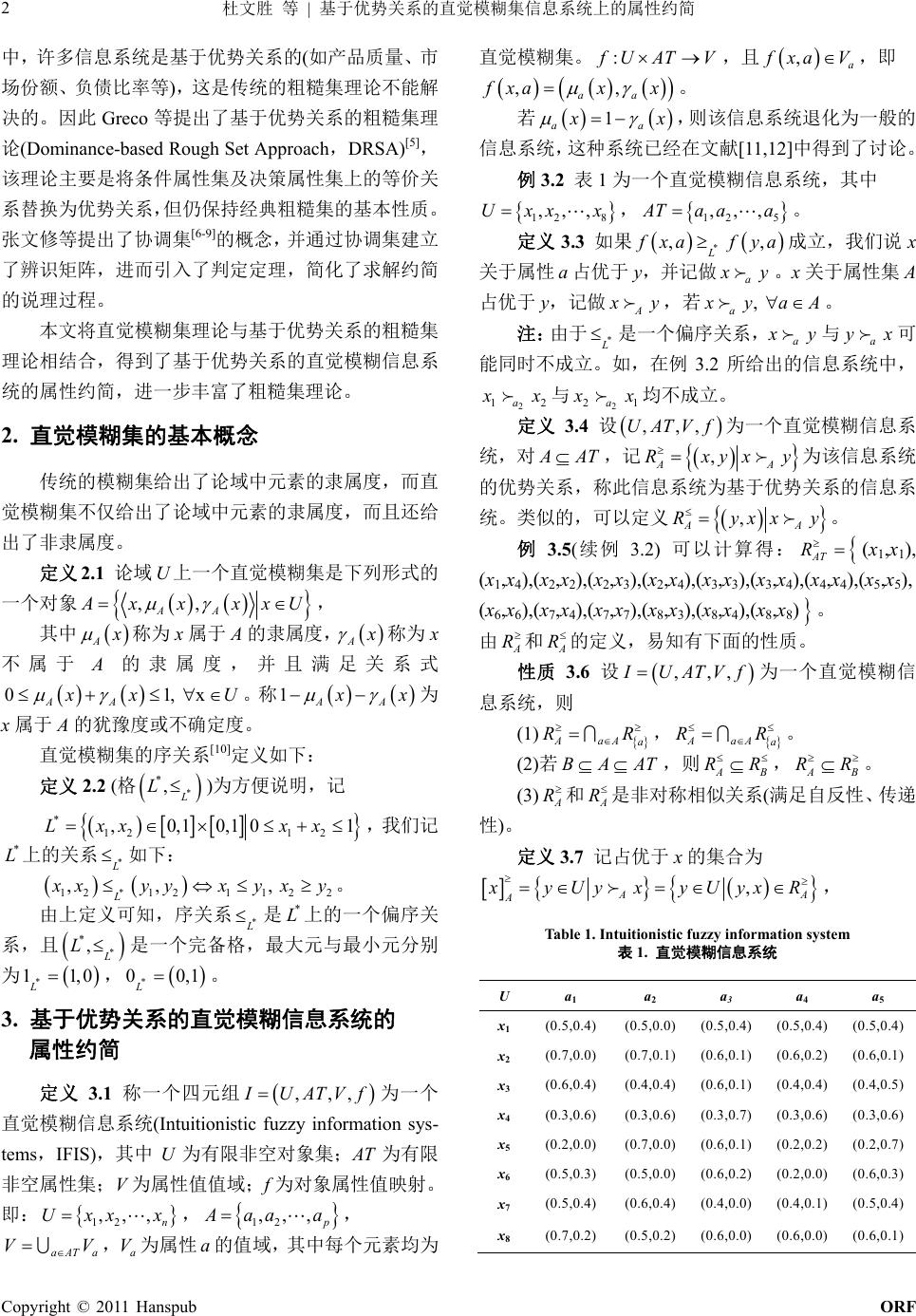
例
3.2
表
1
为一个直觉模糊信息系统,其中
8
,
x
12
,,
Uxx
,
5
,
12
,,
A
Ta
a
a
。
定义
3.3
如果
*
,
L
,
f
xa
f
a
ya
成立,我们说
x
关于属性占优于
y
,并记做
a
x
y
。
x
关于属性集
A
占优于
y
,记做
A
x
y
,若
,
a
x
yaA
*
。
注:
由于
L
是一个偏序关系,
a
x
y
与 可
能同时不成立。如,在例
3.2
所给出的信息系统中,
a
yx
2
12
a
x
x
与
2
21
a
x
x
均不成立。
定义
3.4
设
,,,
UATVf
为一个直觉模糊信息系
统,对
A
AT
,记
A
xy
,
A
Rx
y
为该信息系统
的优势关系,称此信息系统为基于优势关系的信息系
统。类似的,可以定义
,
AA
xx
Ry
y
。
例
3.5
(
续例
3.2)
可以计算得:
AT
R
(
x
1
,
x
1
)
,
(
x
1
,
x
4
),(
x
2
,
x
2
),(
x
2
,
x
3
),(
x
2
,
x
4
),(
x
3
,
x
3
),(
x
3
,
x
4
),(
x
4
,
x
4
),(
x
5
,
x
5
),
(
x
6
,
x
6
),(
x
7
,
x
4
),(
x
7
,
x
7
),(
x
8
,
x
3
),(
x
8
,
x
4
),(
x
8
,
x
8
)
。
由 和
A
R
A
R
的定义,易知有下面的性质。
性质
3.6
设
,,,
I
UATV
AaA
a
RR
f
为一个直觉模糊信
息系统,则
(1)
,
AaA
a
RR
BAAT
R
A
R
。
(2)
若,则 , 。
AB
R
AB
RR
(3
)
和
A
R
是非对称相似关系
(
满足自反性、传递
性
)
。
定义
3.7
记占优于
x
的集合为
,
AA
A
x
yUyxyUyxR
,
Table 1. Intuitionistic fuzzy information system
表
1.
直觉模糊信息系统
U
a
1
a
2
a
3
a
4
a
5
x
1
(0.5,0.4) (0.5,0.0) (0.5,0.4) (0.5,0.4) (0.5,0.4)
x
2
(0.7,0.0) (0.7,0.1) (0.6,0.1) (0.6,0.2) (0.6,0.1)
x
3
(0.6,0.4) (0.4,0.4) (0.6,0.1) (0.4,0.4) (0.4,0.5)
x
4
(0.3,0.6) (0.3,0.6) (0.3,0.7) (0.3,0.6) (0.3,0.6)
x
5
(0.2,0.0) (0.7,0.0) (0.6,0.1) (0.2,0.2) (0.2,0.7)
x
6
(0.5,0.3) (0.5,0.0) (0.6,0.2) (0.2,0.0) (0.6,0.3)
x
7
(0.5,0.4) (0.6,0.4) (0.4,0.0) (0.4,0.1) (0.5,0.4)
x
8
(0.7,0.2) (0.5,0.2) (0.6,0.0) (0.6,0.0) (0.6,0.1)
Cop
yright © 2011 Hanspub
ORF
杜文胜
等
|
基于优势关系的直觉模糊集信息系统上的属性约简
Copyright © 2011 Hanspub
ORF
3
被
x
所占优的集合为
A
,
AA
x
yUxyyUyxR
。
,,
AT AT
DxyDyx
不一定成立。
定理
3.13
设
,,,
UATVf
为一个直觉模糊信息
系统,则
B
是协调集
例
3.8
(
续例
3.2)
可以计算得:
11
AT
x
x
,
22
AT
x
x
,
323
,,
AT
8
x
xxx
, ,, , ,}
,
对
,
AT
x
yR
,有。
,
AT
BD xy
412347
{
AT
8
[]
x
xxxxxx
,
55
AT
[] {}
x
x
,
66
[] {}
AT
x
x
,
77
[] {}
AT
x
x
,
88
[] {}
AT
x
x
。
由
A
x
和
A
x
的定义,易知有下面的性质。
性质
3.9
设
,,,
I
UATVf
为一个直觉模糊信
息系统,
(1)
若 ,则
BAAT
AB
x
x
,
AB
x
x
。
(2)
若 ,则
,且
A
yx
[]
A
AA
yx
A
yx
A
x
y
yx
。
若 ,则
,且
A
yx
AA
[]
A
A
yx
A
x
y
,,,
fyaaA
A
。
(3)
;
yx
AA
fxa
,,,
AA
yx fxafyaa
。
(4)
/
A
A
URx xU
,
/
A
A
URx xU
一般不是
U
的划分,而是
U
的一个覆盖。
由于
A
x
和
A
x
的性质是类似的,所以我们以下
仅对
A
x
作讨论,读者不难证明对
A
x
亦有相应的结
论。
定义
3.10
设
为一个直觉模糊信息
系统,若
,且
,,,
UATVf
T
BA
B
AT
RR
,则称
B
是在关系
下的协调集,若进一步对任意
b
, ,
则称
B
是直觉模糊信息系统在关系 下的约简。
若所
有约简的交集非空,则称此交集非空为核。
A
R
AT
B
R
Bb
RR
A
下面我们介绍一种求解所有约简的方法。
定义
3.11
设
为一个直觉模糊信息
系统,记
,,,
UATVf
,,
AT
a
Dxy aATxyR
为在关系
A
x
下可辨识
x
与
y
的属性集,矩阵
AT
D
,,
AT
DxyxyU
称为该信息系统的辨识矩阵。
例
3.12
(
续例
3.5)
计算表
1
中的辨识矩阵如表
2
。
注:对基于优势关系的直觉模糊信息系统来说,
证明
:
"
若
B
是协调集,则
"
B
AT
RR
,因此对
x
U
,有
B
AT
x
x
。
若
,
AT
x
yR
即
,则
AT
yx
B
yx
,因此存
在
aB
,使得
a
,
x
yR
,所以 。
,
AT
aD
xy
因此有
,
AT
BD xy
,
,
AT
x
yR
。
""
若
,
AT
x
yR
,且
,
AT
BD xy
,则
,
Dxy
AT
,并且存在 ,使得
a
B
y
,
AT
aD x
即
a
,
x
yR
,所以
,
B
x
y
R
。由此可得 。
AT
RR
B
又显然有
,因 此
AT B
RR
B
AT
RR
,即
B
是协调
集。证毕。
定义
3.14
设
,,,
UATVf
为一个直觉模糊信息
系统,记
,
xy
y
,
AT
U U
Dx
,称为该信息系
统的辨识公式。记
yU
,
AT
x
Dxy
,称为对
象
x
的辨识公式。
辨识公式
的极小析取范式可以唯一的确定信息
系统所有的约简。
例
3.15
(
续例
3.12)
1131234
x
aa aaaa
1345234
aaaa aaa
312 14
aaa aa
;
2224 34
x
aaaaa
23 24
aa aa
;
3245124
x
aaa aaa
1245 2345
aaaaaaaa
152
aa aa
4
;
41234
x
aaaa
;
51451345
x
aaa aaaa
14
aaa
5
;
Table 2. Discernibility matrix of intuitionistic fuzzy information system in Table 1
表
2.
直觉模糊信息系统的辨识矩阵
U x
1
x
2
x
3
x
4
x
5
x
6
x
7
x
8
x
1
AT a
1
,
a
3
a
1
,
a
2
,
a
3
,
a
4
a
1
,
a
3
,
a
4
,
a
5
a
2
,
a
3
,
a
4
a
1
,
a
3
,
a
4
,
a
5
x
2
a
2
a
2
a
2
,
a
4
a
3
,
a
4
a
3
,
a
4
x
3
a
2
,
a
4,
a
5
AT
a
1
,
a
2
,
a
4
a
2
,
a
3
,
a
4
,
a
5
AT
x
4
AT AT AT
a
1
,
a
2
,
a
3
,
a
4
AT AT AT
x
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
3
,
a
4
,
a
5
a
1
,
a
3
,
a
4
,
a
5
x
6
a
4
AT a
1
,
a
3
,
a
4
a
4
a
1
,
a
2
,
a
3
a
2
,
a
3
,
a
4
a
1
,
a
3
,
a
4
,
a
5
x
7
a
2
,
a
3
,
a
4
AT a
1
,
a
3
a
1
,
a
2
,
a
3
AT AT
x
8
a
2
a
1
,
a
2
a
1
,
a
2
a
2
a
2
杜文胜 等基于优势关系的直觉模糊集信息系统上的属性约简
4
|
64134 123
x
aaaa aaa
234 1345
aaaaaaa
4123
aaaa
;
7234 13 123
x
aaa aaaaa
12 14
aaaaa
3
;
82122
x
aaaa
;
124 234
xU
x
aaa aaa
。
因此该信息系统所有的约简为
和
,核为 。
12
aaa
4
4
23
aaa
24
,
aa
4.
基于优势关系的直觉模糊决策信息系统
的相对约简
定义
4.1
设
,,,
I
UAT dVf
,
为一个直觉模糊
决策信息系统,
其中
AT
为条件属性集,
d
为决策属性,
且 ,
ATd
f
xd
为单值的有序实值。记
,, ,
dxfdy
AT
d
RR
d
Rxyf
,若
,则称该
决策信息系统为一致的,否则称为不一致的。
限于篇幅我们本文仅讨论一致直觉模糊决策信息
系统,对于不一致决策信息系统的情形,我们将另文
发表。
定义
4.2.
设
,,,
I
UAT dVf
若
BA
且
为一致直觉模
糊决策信息
系统,
T
,
B
d
R
,则称
B
是该决策信息系统的协调集,若进一步对任意
R
bB
,
,
则称
B
是决策信息系统的一个相对约简。
d
Bb
R
R
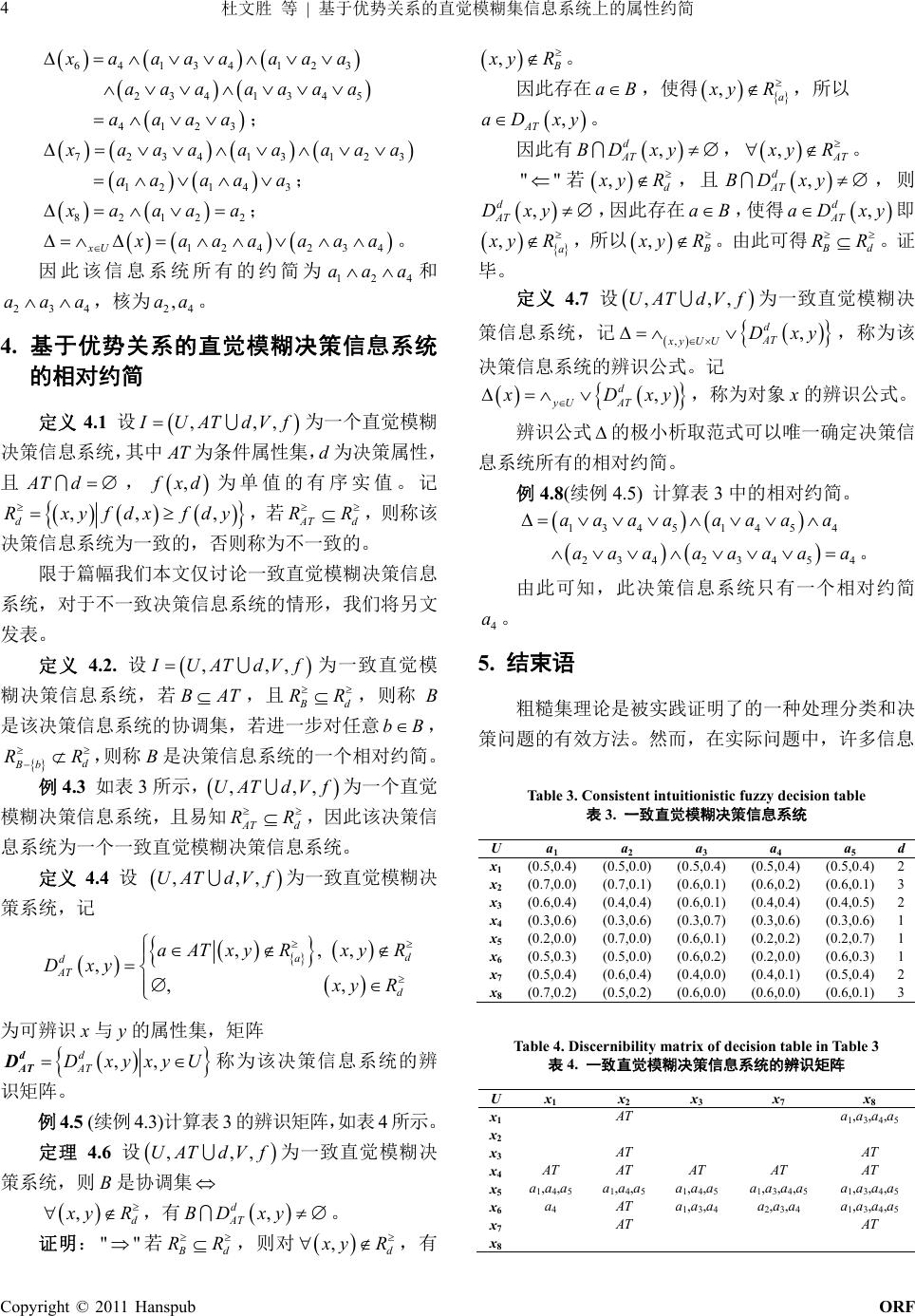
例
4.3
如表
3
所示,
为一个直觉
模糊决策信息系统,且易知 ,因此该决策信
息系统为
一个一致直觉模糊决策信息系统。
,,,
UAT dVf
AT d
RR
定义
4.4
设
为一致直觉模糊决
策系统,记
,,,
UAT dVf
,, ,
,
, ,
d
a
d
AT
d
aATxy Rxy R
Dxy
x
yR
为可辨识
x
与
y
的属性集,矩阵
,,
d
AT
DxyxyU
d
AT
D
称为该决策信息系统的辨
识矩阵。
例
4.5
(
续例
4.3)
计算表
3
的辨识矩阵,
如表
4
所示。
定理
4.6
设
为一致直觉模糊决
策系统,则
B
是协调集
,,,
UAT dVf
,
d
x
yR
,有 。
,
d
AT
BD xy
证明
: 若
"
"
B
d
RR
,则对
,
d
x
yR
,有
,
B
x
yR
。
因此存在
aB
,使得
,
a
x
yR
,所以
y
,
AT
aD x
。
因此有
,
d
AT
BD xy
,
,
AT
x
yR
。
""
若
,
d
x
yR
,且
,
d
AT
BD xy
,则
,
d
AT
Dxy
,因此存在 ,使得
a
B
y
,
d
AT
aD x
即
,
a
x
yR
,所 以
,
B
x
yR
。由 此 可得
B
d
R
R
。证
毕。
定义
4.7
设
,,,
UAT dVf
,
xy
U U
为一致直觉模糊决
策信息系统,记 ,称为该
决策信息
系统的辨识公式。记
,
d
AT
Dxy
,
d
ATyU
x
Dxy
,称为对象
x
的辨识公式。
辨识公式
的极小析取范式可以唯一确定决策信
息系统所有的相对约简。
例
4.8
(
续例
4.5)
计算表
3
中的相对约简。
1345 145
aaaaaaa a
4
234 2345
aaaaaaa a
4
。
由此可知,此决策信息系统只有一个相对约简
。
4
a
5.
结束语
粗糙集理论是被实践证明了的一种处理分类和决
策问题的有效方法。然而,在实际问题中,许多信息
Table 3. Consistent intuitionistic fuzzy decision table
表
3.
一致直觉模糊决策信息系统
Ua
1
a
2
a
3
a
4
a
5
d
x
1
(0.5,0.4)(0.5,0.0)(0.5,0.4) (0.5,0.4) (0.5,0.4)2
x
2
(0.7,0.0)(0.7,0.1)(0.6,0.1) (0.6,0.2) (0.6,0.1)3
x
3
(0.6,0.4)(0.4,0.4)(0.6,0.1) (0.4,0.4) (0.4,0.5)2
x
4
(0.3,0.6)(0.3,0.6)(0.3,0.7) (0.3,0.6) (0.3,0.6)1
x
5
(0.2,0.0)(0.7,0.0)(0.6,0.1) (0.2,0.2) (0.2,0.7)1
x
6
(0.5,0.3)(0.5,0.0)(0.6,0.2) (0.2,0.0) (0.6,0.3)1
x
7
(0.5,0.4)(0.6,0.4)(0.4,0.0) (0.4,0.1) (0.5,0.4)2
x
8
(0.7,0.2)(0.5,0.2)(0.6,0.0) (0.6,0.0) (0.6,0.1)3
Table 4. Discernibility matrix of decision table in Table 3
表
4.
一致直觉模糊决策信息系统的辨识矩阵
Ux
1
x
2
x
3
x
7
x
8
x
1
AT
a
1
,
a
3
,
a
4
,
a
5
x
2
x
3
AT AT
x
4
AT AT AT AT AT
x
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
4
,
a
5
a
1
,
a
3
,
a
4
,
a
5
a
1
,
a
3
,
a
4
,
a
5
x
6
a
4
AT a
1
,
a
3
,
a
4
a
2
,
a
3
,
a
4
a
1
,
a
3
,
a
4
,
a
5
x
7
AT AT
x
8
Cop
yright © 2011 Hanspub
ORF
杜文胜 等基于优势关系的直觉模糊集信息系统上的属性约简
5
|
系统是基于优势关系的,因此
Greco
等提出了基于优
势关系的粗糙集理论。本文讨论了基于优势关系的直
觉模糊信息系统的属性约简及决策信息系统的相对约
简,进一步拓展了基于优势关系的粗糙集理论的研究
对象。
6.
致谢
本文得到国家自然科学基金
(61179038
,
70771081)
资助。
参考文献
(References)
[1]
L. A. Zadeh. Fuzzy sets. Information and Control, 1965, 8(3):
338-353.
[2]
K. T. Atanassov. Intuitionistic fuzzy sets. Fuzzy Sets and Sys-
tems, 1986, 20: 87-96.
[3]
徐泽水
.
直觉模糊信息集成理论及应用
[M].
北京
:
科学出版
社
, 2008.
[4]
Z. Pawlak. Rough sets. International Journal of Computer and
Information Sciences, 1982, 11(5): 341-356.
[5]
S. Greco, B. Matarazzo, and R. Slowinski. Rough approximation
by dominance relations. International Journal of Intelligence
Systems, 2002, 17(2): 153-171.
[6]
J. S. Mi, W. Z. Wu, and W. X. Zhang. Approaches to knowledge
reduction based on variable precision rough set model. Informa-
tion Sciences, 2004, 159(3-4): 255-272.
[7]
M. W. Shao, W. X. Zhang. Dominance relation and rules in an
incomplete ordered information system. International Journal of
Intelligent Systems, 2005, 20(1): 13-27.
[8]
W. X. Zhang, J. S. Mi. Incomp
lete information system and its
optimal selections. Computers & Mathematics with Applications,
2004, 48(5-6): 691-698.
[9]
W. X. Zhang, J. S. Mi, and W. Z. Wu. Approaches to knowledge
reductions in inconsistent systems.
International Journal of Intel-
ligent Systems, 2003, 18(9): 989-1000.
[10]
C. Cornelis, G. Deschrijver, and E. Kerre. Implication in in-
tuitionistic fuzzy and interval-valued fuzzy set theory: Construc-
tion, classification, application. International Journal of Ap-
proximation Reasoning, 2004, 35(1): 55-95.
[11]
S. Greco, B. Matarazzo, and R. Slowinski. Rough sets theory for
multi-criteria decision analysis. European Journal of Operational
Research, 2001, 129(1): 1-47.
[12]
Y. Kusunoki, M. Inuiguchi. V. Torra, Y. Narukawa (Eds.). A
comprehensive study on reducts in Dominance-Based Rough Set
Approach.
Lecture Notes in Computer Science
, 2008, 5285:
167-
178.
Cop
yright © 2011 Hanspub
ORF