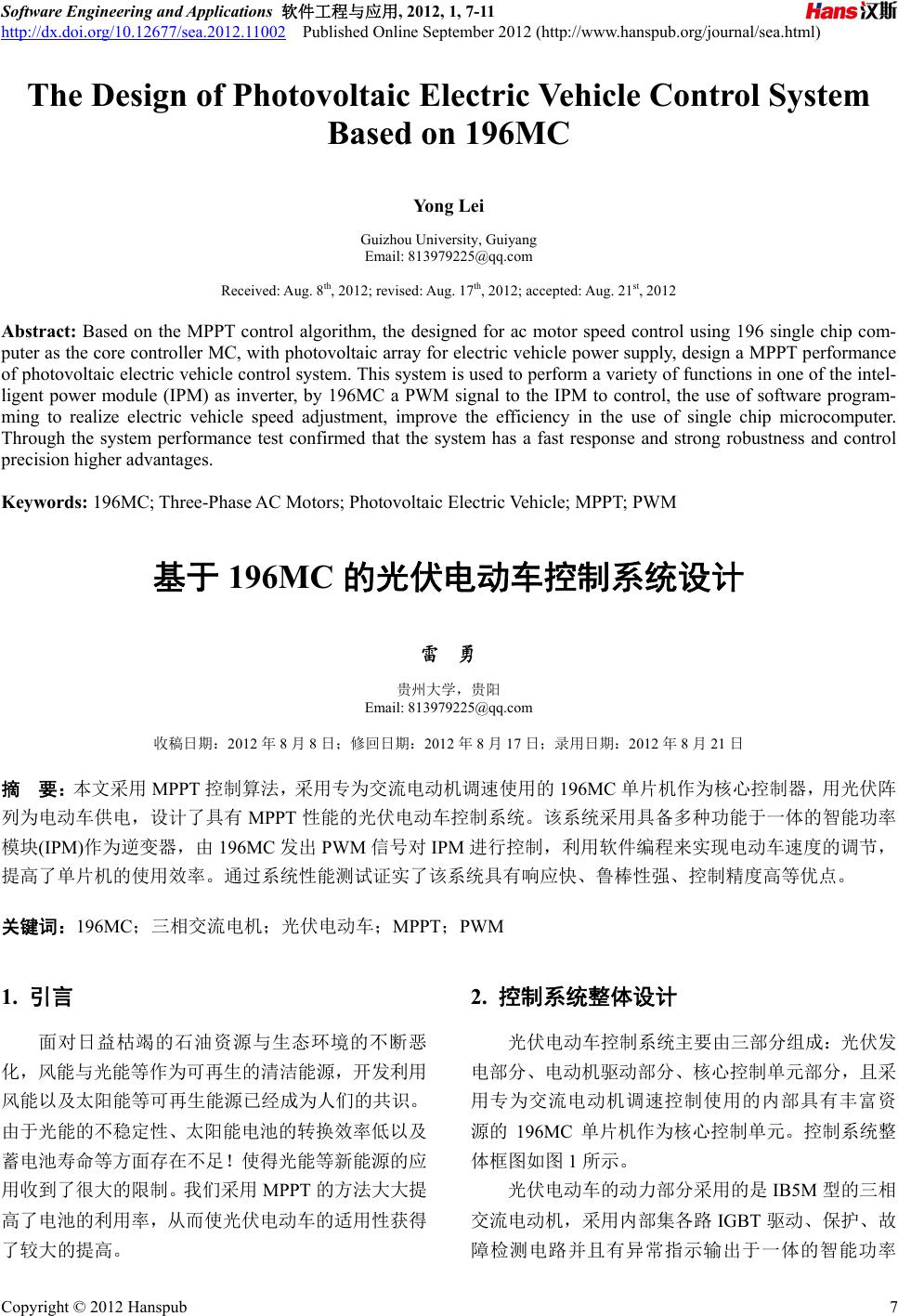
 Software Engineering and Applications 软件工程与应用, 2012, 1, 7-11 http://dx.doi.org/10.12677/sea.2012.11002 Published Online September 2012 (http://www.hanspub.org/journal/sea.html) The Design of Photovoltaic Electric Vehicle Control System Based on 196MC Yong Lei Guizhou University, Guiyang Email: 813979225@qq.com Received: Aug. 8th, 2012; revised: Aug. 17th, 2012; accepted: Aug. 21st, 2012 Abstract: Based on the MPPT control algorithm, the designed for ac motor speed control using 196 single chip com- puter as the core controller MC, with photovoltaic array for electric vehicle power supply, design a MPPT performance of photovoltaic electric vehicle control system. This system is used to perform a variety of functions in one of the intel- ligent power module (IPM) as inverter, by 196MC a PWM signal to the IPM to control, the use of software program- ming to realize electric vehicle speed adjustment, improve the efficiency in the use of single chip microcomputer. Through the system performance test confirmed that the system has a fast response and strong robustness and control precision higher advantages. Keywords: 196MC; Three-Phase AC Motors; Photovoltaic Electric Vehicle; MPPT; PWM 基于 196MC 的光伏电动车控制系统设计 雷 勇 贵州大学,贵阳 Email: 813979225@qq.com 收稿日期:2012 年8月8日;修回日期:2012年8月17 日;录用日期:2012 年8月21日 摘 要:本文采用 MPPT控制算法,采用专为交流电动机调速使用的196MC 单片机作为核心控制器,用光伏阵 列为电动车供电,设计了具有 MPPT性能的光伏电动车控制系统。该系统采用具备多种功能于一体的智能功率 模块(IPM)作为逆变器,由 196MC 发出 PWM信号对IPM进行控制,利用软件编程来实现电动车速度的调节, 提高了单片机的使用效率。通过系统性能测试证实了该系统具有响应快、鲁棒性强、控制精度高等优点。 关键词:196MC;三相交流电机;光伏电动车;MPPT;PWM 1. 引言 面对日益枯竭的石油资源与生态环境的不断恶 化,风能与光能等作为可再生的清洁能源,开发利用 风能以及太阳能等可再生能源已经成为人们的共识。 由于光能的不稳定性、太阳能电池的转换效率低以及 蓄电池寿命等方面存在不足!使得光能等新能源的应 用收到了很大的限制。我们采用MPPT 的方法大大提 高了电池的利用率,从而使光伏电动车的适用性获得 了较大的提高。 2. 控制系统整体设计 光伏电动车控制系统主要由三部分组成:光伏发 电部分、电动机驱动部分、核心控制单元部分,且采 用专为交流电动机调速控制使用的内部具有丰富资 源的 196MC 单片机作为核心控制单元。控制系统整 体框图如图 1所示。 光伏电动车的动力部分采用的是IB5M型的三相 交流电动机,采用内部集各路 IGBT 驱动、保护、故 障检测电路并且有异常指示输出于一体的智能功率 Copyright © 2012 Hanspub 7 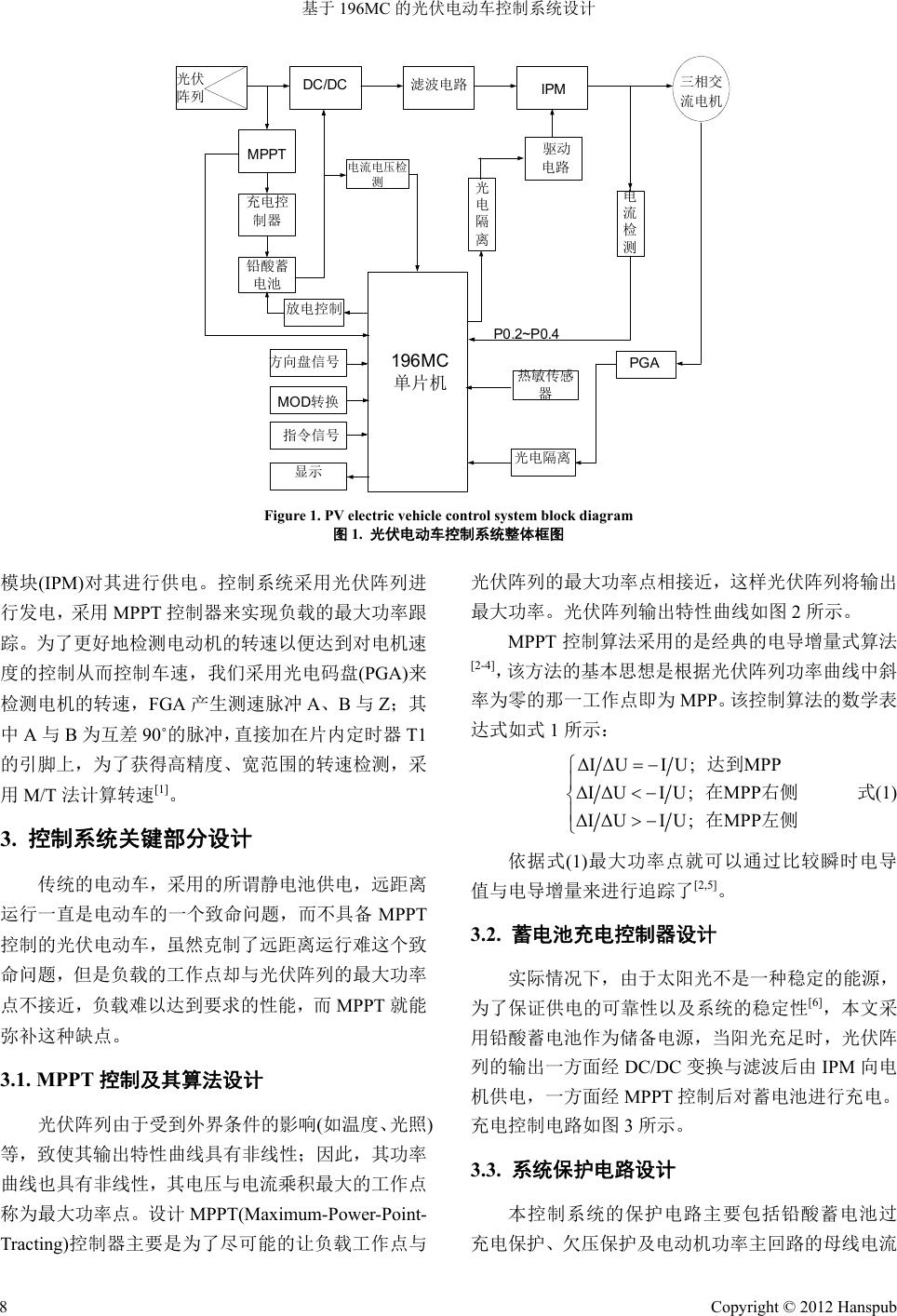 基于 196MC 的光伏电动车控制系统设计 三相交 流电机 电流电压检 测 铅酸蓄 电池 充电控 制器 放电控制 显示 DC/DC 光伏 阵列 滤波电路 IPM MPPT 驱动 电路 光 电 隔 离 电 流 检 测 PGA 光电隔离 方向盘信号 MOD转换 指令信号 196 MC 单片机 热敏传感 器 P0.2~P0.4 Figure 1. PV electric vehicle control system block diagram 图1. 光伏电动车控制系统整体框图 模块(IPM) 对其进行供电。控制系统采用光伏阵列进 行发电,采用 MPPT 控制器来实现负载的最大功率跟 踪。为了更好地检测电动机的转速以便达到对电机速 度的控制从而控制车速,我们采用光电码盘(PGA)来 检测电机的转速,FGA 产生测速脉冲 A、B与Z;其 中A与B为互差90˚的脉冲,直接加在片内定时器T1 的引脚上,为了获得高精度、宽范围的转速检测,采 用M/T 法计算转速[1]。 3. 控制系统关键部分设计 传统的电动车,采用的所谓静电池供电,远距离 运行一直是电动车的一个致命问题,而不具备MPPT 控制的光伏电动车,虽然克制了远距离运行难这个致 命问题,但是负载的工作点却与光伏阵列的最大功率 点不接近,负载难以达到要求的性能,而MPPT 就能 弥补这种缺点。 3.1. MPPT控制及其算法设计 光伏阵列由于受到外界条件的影响(如温度、光照) 等,致使其输出特性曲线具有非线性;因此,其功率 曲线也具有非线性,其电压与电流乘积最大的工作点 称为最大功率点。设计MPPT(Maximum-Power-Point- Tracting)控制器主要是为了尽可能的让负载工作点与 光伏阵列的最大功率点相接近,这样光伏阵列将输出 最大功率。光伏阵列输出特性曲线如图 2所示。 MPPT 控制算法采用的是经典的电导增量式算法 [2-4],该方法的基本思想是根据光伏阵列功率曲线中斜 率为零的那一工作点即为MP P 。该控制算法的数学表 达式如式 1所示: ΔIΔUIU; MPP ΔIΔUIU; MPP ΔIΔUIU; MPP 达到 在右 在左 侧 侧 式(1) 依据式(1)最大功率点就可以通过比较瞬时电导 值与电导增量来进行追踪了[2,5]。 3.2. 蓄电池充电控制器设计 实际情况下,由于太阳光不是一种稳定的能源, 为了保证供电的可靠性以及系统的稳定性[6],本文采 用铅酸蓄电池作为储备电源,当阳光充足时,光伏阵 列的输出一方面经 DC/DC变换与滤波后由 IPM 向电 机供电,一方面经MPPT控制后对蓄电池进行充电。 充电控制电路如图 3所示。 3.3. 系统保护电路设计 本控制系统的保护电路主要包括铅酸蓄电池过 充电保护、欠压保护及电动机功率主回路的母线电流 Copyright © 2012 Hanspub 8 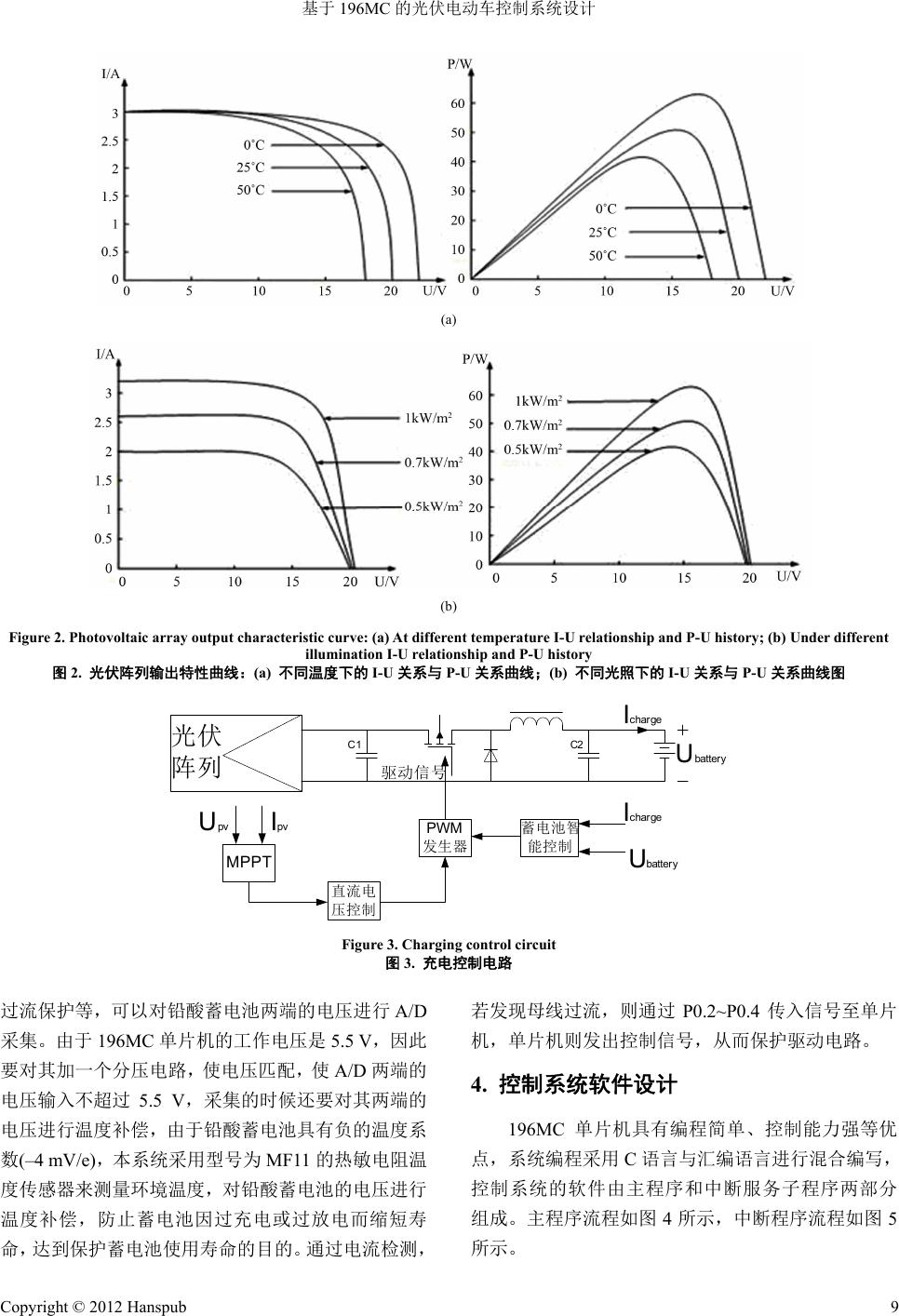 基于 196MC 的光伏电动车控制系统设计 (a) (b) Figure 2. Photovoltaic array output characteristic curve: (a) At different temperature I-U relationship and P-U history; (b) Under different illumination I-U relationship and P-U history 图2. 光伏阵列输出特性曲线:(a) 不同温度下的 I-U 关系与 P-U 关系曲线;(b) 不同光照下的 I-U 关系与 P-U 关系曲线图 光伏 阵列 PWM 发生器 直流电 压控制 MPPT 蓄电池智 能控制 Upv Ipv I charge Ubattery Icharge Ubattery 驱动信号 C1 C2 Figure 3. Charging control circuit 图3. 充电控制电路 过流保护等,可以对铅酸蓄电池两端的电压进行 A/D 采集。由于 196MC 单片机的工作电压是5.5 V,因此 要对其加一个分压电路,使电压匹配,使 A/D 两端的 电压输入不超过 5.5 V,采集的时候还要对其两端的 电压进行温度补偿,由于铅酸蓄电池具有负的温度系 数(–4 mV/e),本系统采用型号为MF11 的热敏电阻温 度传感器来测量环境温度,对铅酸蓄电池的电压进行 温度补偿,防止蓄电池因过充电或过放电而缩短寿 命,达到保护蓄电池使用寿命的目的。通过电流检测, 若发现母线过流,则通过 P0.2~P0.4 传入信号至单片 机,单片机则发出控制信号,从而保护驱动电路。 4. 控制系统软件设计 196MC 单片机具有编程简单、控制能力强等优 点,系统编程采用C语言与汇编语言进行混合编写, 控制系统的软件由主程序和中断服务子程序两部分 组成。主程序流程如图 4所示,中断程序流程如图 5 所示。 Copyright © 2012 Hanspub 9 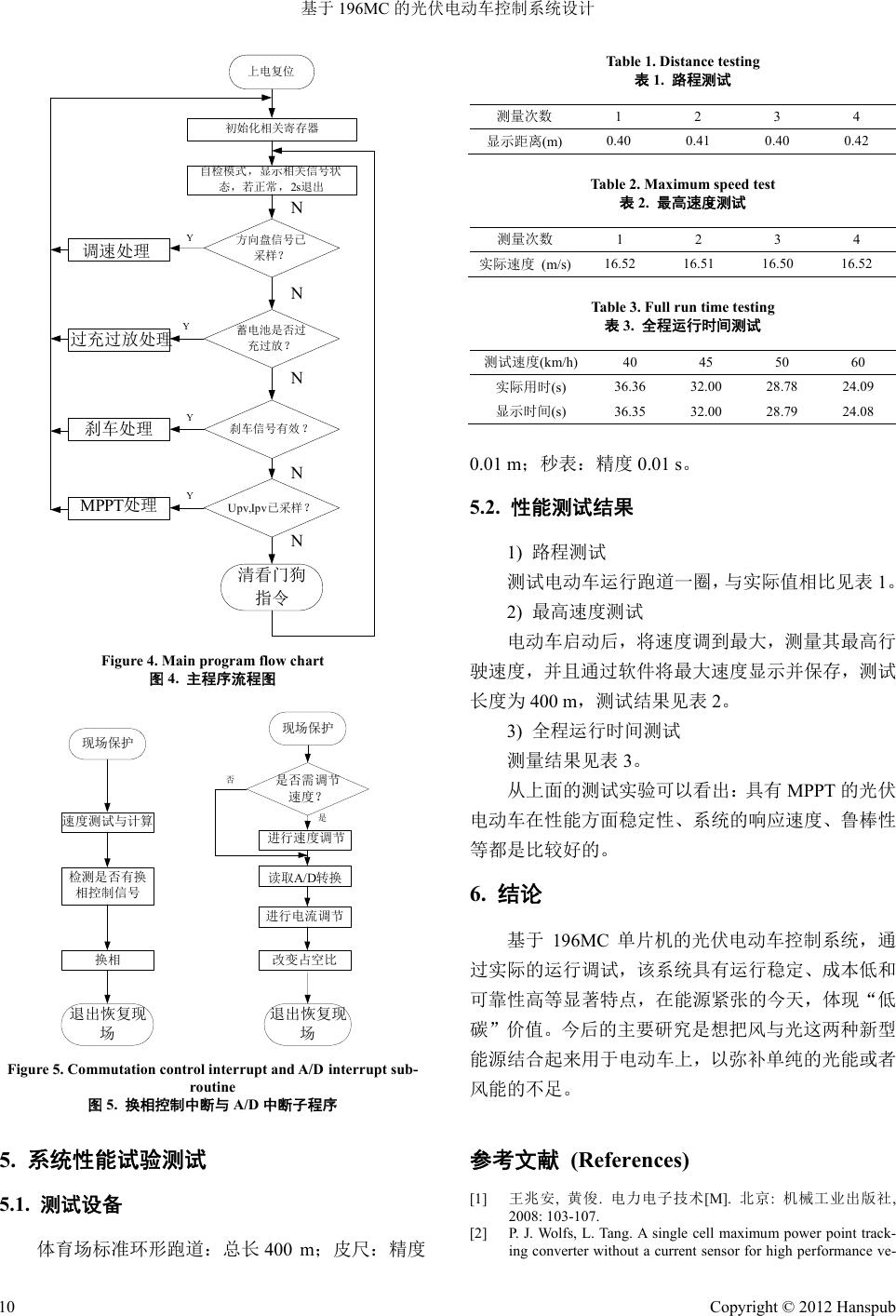 基于 196MC 的光伏电动车控制系统设计 清看门狗 指令 方向盘信号已 采样? 上电复位 初始化相关寄存器 自检模式,显示相关信号状 态,若正常,2s退出 蓄电池是否过 充过放? 刹车信号有效 ? Upv,Ipv已采样? Y Y Y Y MPPT处理 刹车处理 过充过放处理 调速处理 N N N N N Figure 4. Main program flow chart 图4. 主程序流程图 换相 退出恢复现 场 现场保护 进行电流调节 退出恢复现 场 是否需调节 速度? 改变占空比 现场保护 进行速度调节 读取A/D转换 是 否 速度测试与计算 检测是否有换 相控制信号 Figure 5. Commutation control interrupt and A/D interrupt sub- routine 图5. 换相控制中断与 A/D 中断子程序 5. 系统性能试验测试 5.1. 测试设备 体育场标准环形跑道:总长400 m;皮尺:精度 Table 1. Distance testing 表1. 路程测试 测量次数 1 2 3 4 显示距离(m) 0.40 0.41 0.40 0.42 Table 2. Maximum speed test 表2. 最高速度测试 测量次数 1 2 3 4 实际速度 (m/s)16.52 16.51 16.50 16.52 Table 3. Full run time testing 表3. 全程运行时间测试 测试速度(km/h) 40 45 50 60 实际用时(s) 36.36 32.00 28.78 24.09 显示时间(s) 36.35 32.00 28.79 24.08 0.01 m;秒表:精度 0.01 s。 5.2. 性能测试结果 1) 路程测试 测试电动车运行跑道一圈,与实际值相比见表 1。 2) 最高速度测试 电动车启动后,将速度调到最大,测量其最高行 驶速度,并且通过软件将最大速度显示并保存,测试 长度为 400 m,测试结果见表2。 3) 全程运行时间测试 测量结果见表3。 从上面的测试实验可以看出:具有MPPT 的光伏 电动车在性能方面稳定性、系统的响应速度、鲁棒性 等都是比较好的。 6. 结论 基于 196MC 单片机的光伏电动车控制系统,通 过实际的运行调试,该系统具有运行稳定、成本低和 可靠性高等显著特点,在能源紧张的今天,体现“低 碳”价值。今后的主要研究是想把风与光这两种新型 能源结合起来用于电动车上,以弥补单纯的光能或者 风能的不足。 参考文献 (References) [1] 王兆安, 黄俊. 电力电子技术[M]. 北京: 机械工业出版社, 2008: 103-107. [2] P. J. Wolfs, L. Tang. A single cell maximum power point track- ing converter without a current sensor for high performance ve- Copyright © 2012 Hanspub 10  基于 196MC 的光伏电动车控制系统设计 Copyright © 2012 Hanspub 11 hicle solararrays. 36th Annual of IEEE Power Electron. Special- ists Conference, 16-16 June 2005: 165-171. [3] H. Koizumi, K. Kurokawa. A novel maximum power point- tracking method for PV module integrated converter. 36th An- nual of IEEE Power Electronics Specialists Conference, 16-16 June 2005: 2081-2086. [4] 王群京, 王涛, 李国丽. 小型风光互补 MPPT 控制的研究[J]. 电气传动, 2009, 39(5): 40-42. [5] K. Irisawa, T. Saito, I. Takano and Y. Sawada. Maximum power pointtracking control of photovoltaic generation system under non-uniform insolation by means of monitoring cells. Confer- ence Record of the Twenty-Eighth IEEE Photovoltaic Specialists Conference, 2000: 1707-1710. [6] 闭金杰, 罗晓曙, 杨日星等. 基于 AV R 的太阳能控制器设计 [J]. 现代电子技术, 2009, 10: 167-169. |